Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (10): 3143-3154.doi: 10.12305/j.issn.1001-506X.2022.10.18
• Systems Engineering • Previous Articles Next Articles
Behavioral decision-making methods of autonomous vehicles based on decision tree and BN
Yanzhao LIU1,2,*, Zhiqiu HUANG1,2,3, Guohua SHEN1,2,3, Jinyong WANG1,2, Heng XU1,2
- 1. College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Key Laboratory of Safety-Critical Software Ministry of Industry and Information Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
3. Collaborative Innovation Center of Novel Software Technology and Industrialization, Nanjing 210093, China
-
Received:2021-06-01Online:2022-09-20Published:2022-10-24 -
Contact:Yanzhao LIU
CLC Number:
Cite this article
Yanzhao LIU, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavioral decision-making methods of autonomous vehicles based on decision tree and BN[J]. Systems Engineering and Electronics, 2022, 44(10): 3143-3154.
share this article
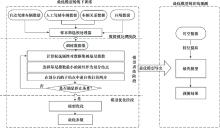
Fig.1
Prediction model of human-driving behaviors"
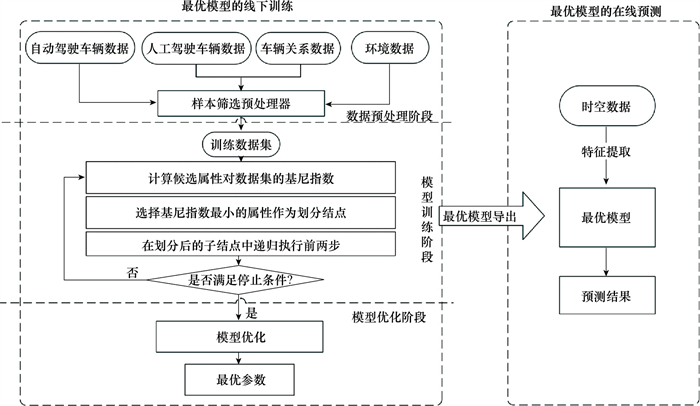
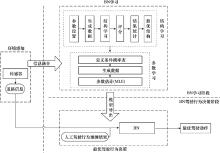
Fig.2
Framework of behavioral decision-making of autonomous vehicles"
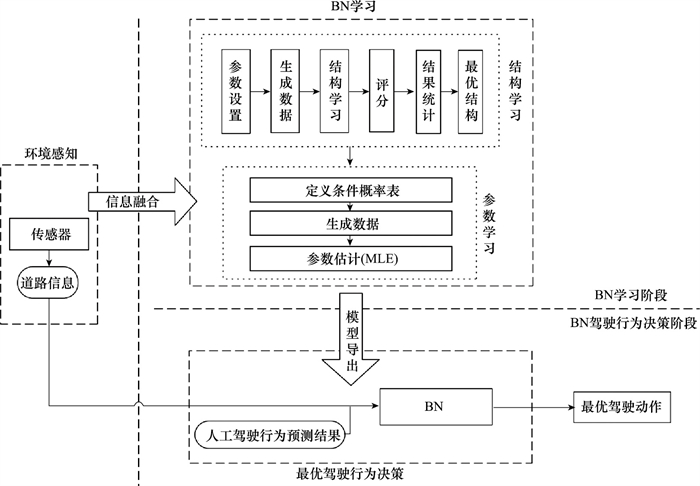
Table 1
Name and meaning of BN nodes"
| 节点名称 | 节点含义 |
| 车道 | 车道数量 |
| 车道线 障碍物 交通灯 人行道 行人 右前方车辆 驾驶行为类别 自动驾驶车辆 | 道路线类型 是否存在障碍物 交通灯颜色 是否存在人行道 行人的行为 右前方车辆驾驶行为 右前方车辆行为分类 自动驾驶车辆行为 |
Fig.3
Initial BN of scenario 1"
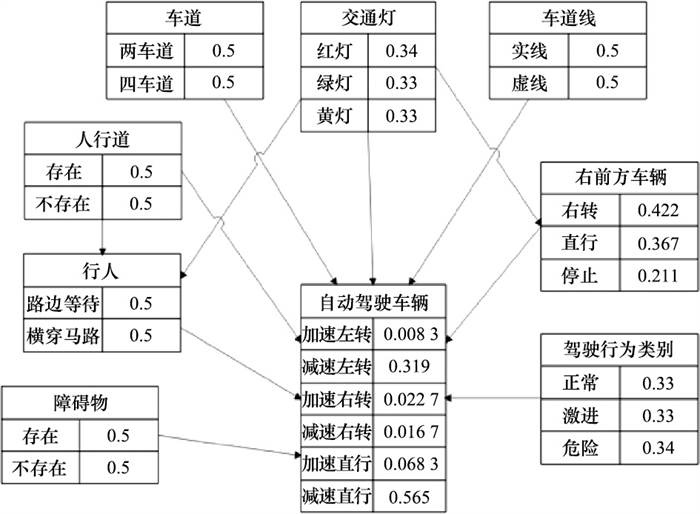

Fig.4
Updated BN of scenario 1"
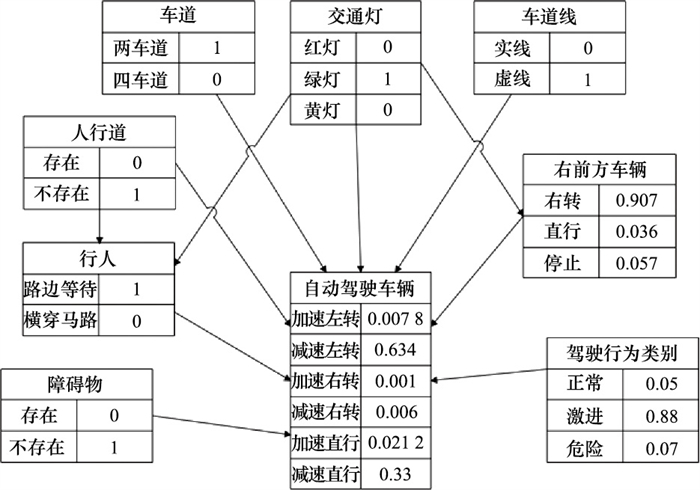
Fig.5
BN of single decision-making model"
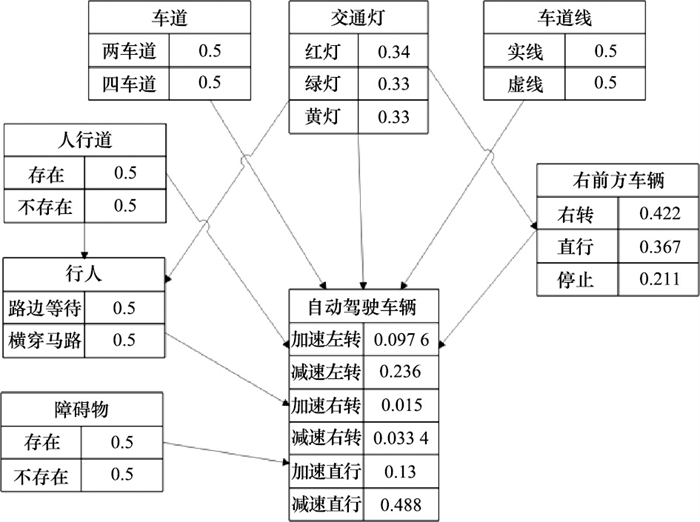
Fig.6
Updated BN of single decision-making model"
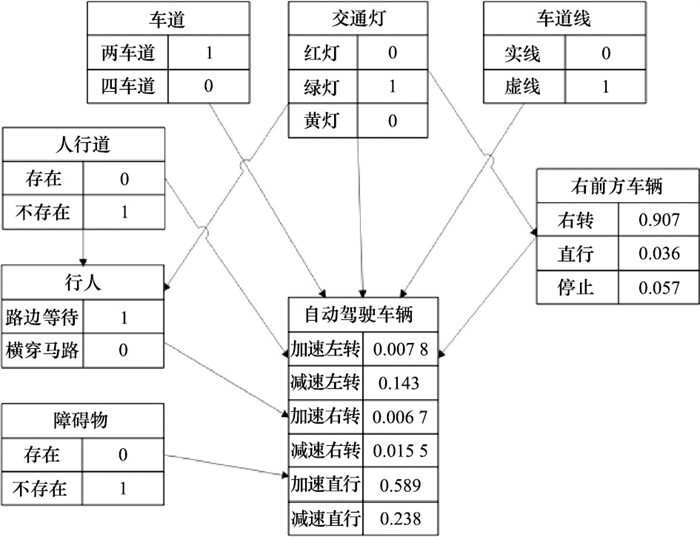

Fig.7
Simulation process of PreScan"
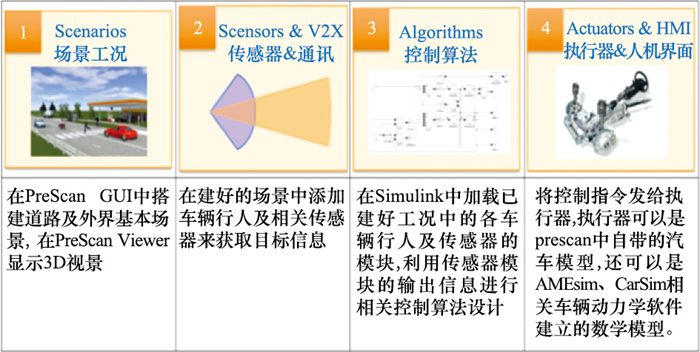

Fig.8
Three dimensional model of scenario 1"


Fig.9
Three dimensional model of scenario 2"
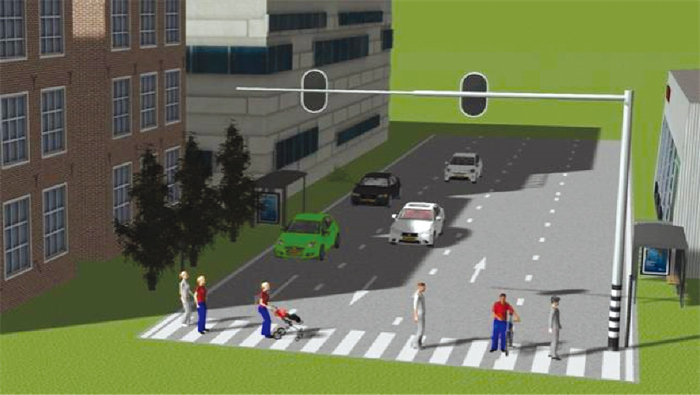

Fig.10
Three dimensional model of scenario 3"

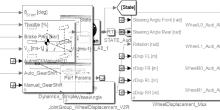
Fig.11
Dynamic model of autonomous vehicle in scenario 1"
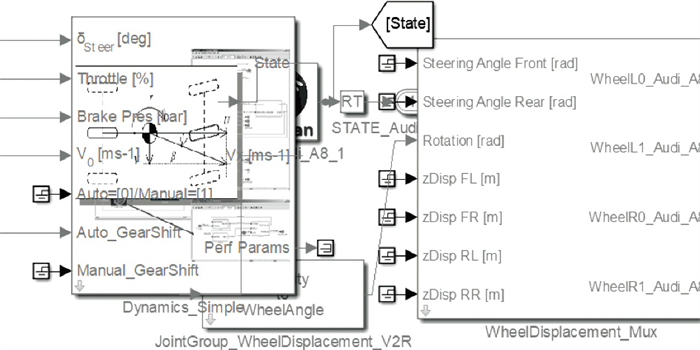
Fig.12
Algorithm of behavioral decision-making in Simulink"
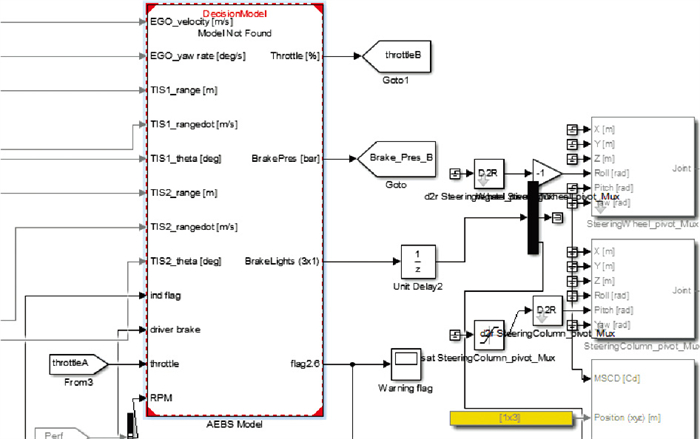
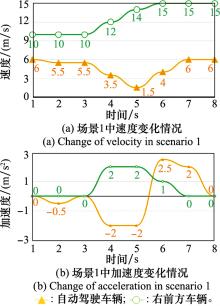
Fig.13
Data of driving vehicles in scenario 1"
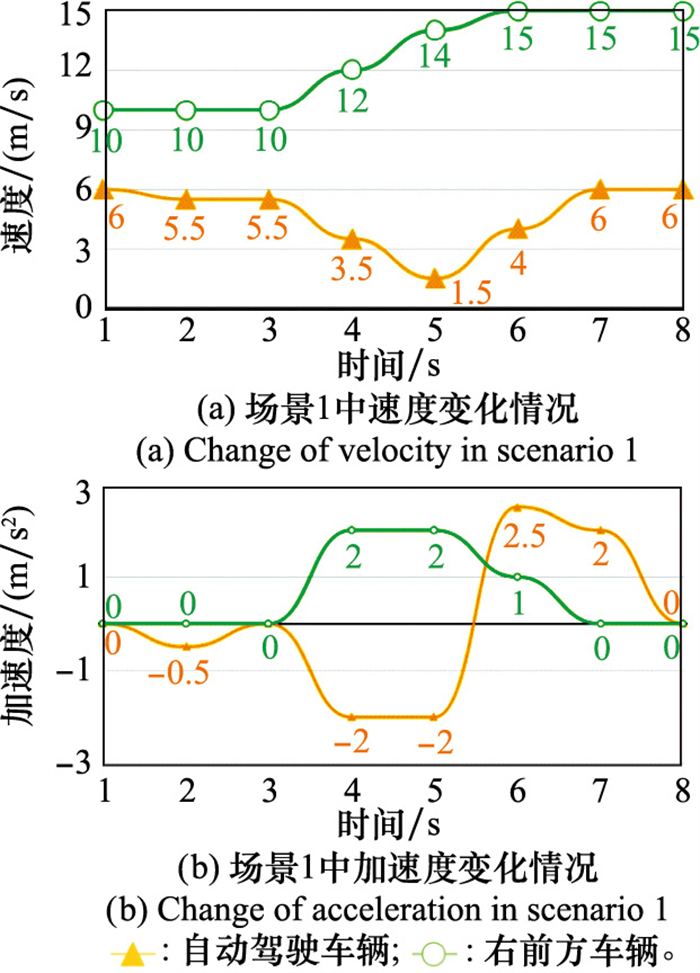

Fig.14
Behavior of vehicle in intersection"


Fig.15
Data of driving vehicles in scenario 2"
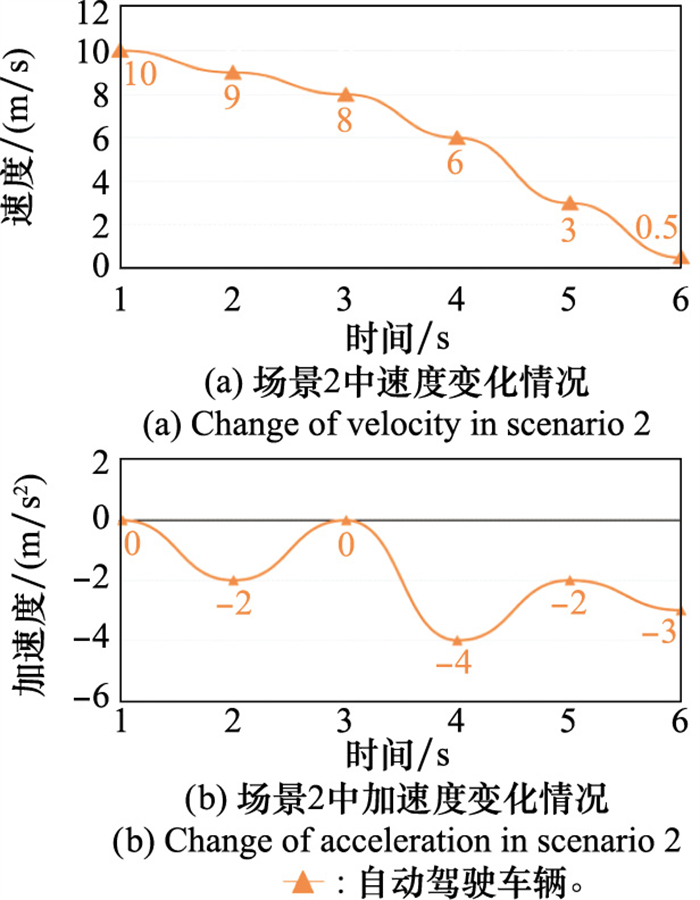

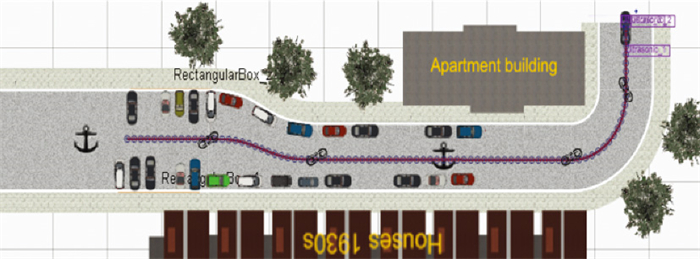
Fig.16
Route of autonomous vehicle in scenario 3"
| 1 | 耿新力. 城区不确定环境下无人驾驶车辆行为决策方法研究[D]. 合肥: 中国科学技术大学, 2017. |
| GENG X L. Research on decision-making method of autonomous vehicle behavior in uncertain environment of urban area[D]. Hefei: China University of Science and Technology, 2017. | |
| 2 | CAI P P, LEE Y Y, LUO Y F, et al. SUMMIT: a simulator for urban driving in massive mixed traffic[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020. |
| 3 | FRIDMAN L, BROWN D E, GLAZER M, et al. MIT Autonomous vehicle technology study: large-scale deep learning based analysis of driver behavior and interaction with Automation[EB/OL]. [2021-05-20]. https://arxiv/abs/1711.06976. |
| 4 |
SCHIRNER G , ERDOGMUS D , CHOWDHURY K R , et al. The future of human-in-the-loop-cyber-physical systems[J]. IEEE Computer, 2013, 46 (1): 36- 45.
doi: 10.1109/MC.2013.31 |
| 5 |
ENDSLEY M R , KIRIS E O . The out-of-the-loop performance problem and level of control in automation[J]. Human Factors, 1995, 37 (2): 381- 394.
doi: 10.1518/001872095779064555 |
| 6 |
AUGUSTYNOWICZ A . Preliminary classification of driving style with objective rank method[J]. International Journal of Automotive Technology, 2009, 10 (5): 607- 610.
doi: 10.1007/s12239-009-0071-8 |
| 7 | CONSTANTINESCU Z , MARINOIU C , VLADOIU M . Dri-ving style analysis using data mining techniques[J]. International Journal of Computers Communications & Control, 2010, 5 (5): 654- 663. |
| 8 |
MIYAJIMA C , NISHIWAKI Y , OZAWA K , et al. Driver modeling based on driving behavior and its evaluation in driver identification[J]. Proceedings of the IEEE, 2007, 95 (2): 427- 437.
doi: 10.1109/JPROC.2006.888405 |
| 9 |
YURTSEVER E , LAMBERT J , CARBALLO A , et al. A survey of autonomous driving: common practices and emerging technologies[J]. IEEE Access, 2020, 8, 58443- 58469.
doi: 10.1109/ACCESS.2020.2983149 |
| 10 | SAMA K, MORALES Y, AKAI N, et al. Driving feature extraction and behavior classification using an autoencoder to reproduce the velocity styles of experts[C]//Proc. of the IEEE 21st International Conference on Intelligent Transportation Systems, 2018: 1337-1343. |
| 11 |
LIU H , TANIGUCHI T , TANAKA Y , et al. Visualization of driving behavior based on hidden feature extraction by using deep learning[J]. IEEE Trans.on Intelligent Transportation Systems, 2017, 18 (9): 2477- 2489.
doi: 10.1109/TITS.2017.2649541 |
| 12 |
AN D D , LIU J , ZHANG M , et al. Uncertainty modeling and runtime verification for autonomous vehicles driving control: a machine learning-based approach[J]. Journal of Systems and Software, 2020, 167, 110617.
doi: 10.1016/j.jss.2020.110617 |
| 13 | 熊璐, 康宇宸, 张培志, 等. 无人驾驶车辆行为决策系统研究[J]. 洗车技术, 2018, 8, 1- 9. |
| XIONG L , KANG Y C , ZHANG P Z , et al. Research on behavior decision-making system for autonomous vehicles[J]. Automobile Technology, 2018, 8, 1- 9. | |
| 14 | 孙振平. 自主驾驶汽车智能控制系统[D]. 长沙: 国防科技大学, 2004. |
| SUN Z P. Autonomous driving vehicles intelligent control system[D]. Changsha: National University of Defense Technology, 2004. | |
| 15 |
URMSON C , ANHALT J , BAGNELL D , et al. Autonomous driving in urban environments: boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25 (8): 425- 466.
doi: 10.1002/rob.20255 |
| 16 |
LEONARD J , HOW J , TELLER S , et al. A perception-driving autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25 (10): 727- 774.
doi: 10.1002/rob.20262 |
| 17 |
MONTEMERLO M , BECKER J , BHAT S , et al. Junior: the stanford entry in the urban challenge[J]. Journal of Field Robotics, 2008, 25 (9): 567- 597.
doi: 10.1002/rob.20259 |
| 18 | PAN X L, YOU Y R, WANG Z Y, et al. Virtual to real reinforcement learning for autonomous driving[EB/OL]. [2021-05-20]. https://arxiv.org/abs/1704.03952. |
| 19 | SEBASTIAN B, TOBIAL G, RUDIGER D. Probabilistic decision making under uncertainty for autonomous driving using continuous POMDPs[C]//Proc. of the 17th International Conference on Intelligent Transportation Systems, 2014: 392-399. |
| 20 |
BARTO A G , MAHADEVAN S . Recent advantages in hierarchical reinforcement learning[J]. Discrete Event Dynamic Systems, 2003, 13 (4): 341- 379.
doi: 10.1023/A:1025696116075 |
| 21 | ULBRICH S, MAURER M. Towards tactical lane change behavior planning for automated vehicles[C]//Proc. of the 18th Intelligent Transportation System, 2015: 989-995. |
| 22 | BRECHTEL S. Dynamic-making in continuous partially observable domains: a novel method and its application for autonomous driving[D]. Karlsruhe: Karlsruhe Institute of Techno-logies, 2015. |
| 23 | LIU T, WANG H, LU B, et al. Decision-making for autonomous vehicles on highway: deep reinforcement learning with continuous action horizon[EB/OL]. [2021-05-20]. https://arxiv.org/abs/2008.11852v1. |
| 24 | 杜明博. 基于人类驾驶行为的无人驾驶车辆行为决策与运动规划方法研究[D]. 合肥: 中国科学技术大学, 2016. |
| DU M B. Research on method of behavior decision-making and motion planning of autonomous vehicles based on human driving behavior[D]. Hefei: China University of Science and Techno-logy, 2016. | |
| 25 | BOJARSKI M, TESTA D D, DWORAKOWSKI D, et al. End to End learning for self-driving cars[EB/OL]. [2021-05-20]. https://arxiv.org/abs/1604.07316. |
| 26 |
SANTINA C D , KATZSCHMANN R K , BICCHI A , et al. Model-based dynamic feedback control of a planar soft robot[J]. The International Journal of Robotics Research, 2020, 39 (4): 490- 513.
doi: 10.1177/0278364919897292 |
| 27 | 石光敏. 协同计算平台下大规模资源监控系统的设计与实现[D]. 西安: 西安电子科技大学, 2017. |
| SHI G M. Design and implementation of large-scale resource monitoring system under collaborative computing platform[D]. Xi'an: Xidian University, 2017. | |
| 28 | IBERRAKEN D, ADOUANE L, DENIS D. Safe autonomous overtaking maneuver based on inter-vehicular distance prediction and multi-level Bayesian decision-making[C]//Proc. of the International Conference on Intelligent Transportation Systems, 2018: 3259-3265. |
| 29 | IBERRAKEN D, ADOUANE L, DENIS D. Multi-level Bayesian decision-making for safe and flexible autonomous navigation in highway environment[C]//Proc. of the International Conference on Intelligent Robots and Systems, 2018: 3984-3990. |
| 30 | 黄唯. 基于贝叶斯网络的高铁行调系统故障诊断研究[D]. 成都: 西南交通大学, 2019. |
| HUANG W. Research on fault diagnosis of high speed railway running dispatching system based on Bayesian network[D]. Chengdu: Southwest Jiaotong University, 2019. | |
| 31 | WORDEN K , HENSMAN J J . Parameter estimation and model selection for a class of hysteretic system using bayesian infe-rence[J]. Mechanical Systems & Signal Processing, 2012, 32, 153- 169. |
| 32 | WAGNER S . A Bayesian network approach to assess and predict software quality using activity-based quality models[J]. Information & Software Technology, 2010, 52 (11): 1230- 1241. |
| 33 | XIONG G M, LI H, DING Z L. Subjective evaluation of vehicle active safety using PreScan and Simulink: lane departure warning system as an example[C]//Proc. of the International Conference on Vehicular Electronics and Safety, 2017: 208-213. |
| [1] | Yuan LI, Xianming SHI, Yajuan LI, Mei ZHAO. Decision method of operational target attribute based on Adaboost [J]. Systems Engineering and Electronics, 2022, 44(4): 1256-1262. |
| [2] | Peng WANG, Zijing SUN, Fan ZHANG, Guosong XIAO. Reliability analysis model for phased-mission system considering probabilistic common cause failures [J]. Systems Engineering and Electronics, 2022, 44(12): 3887-3898. |
| [3] | LI Zhiqiang, XU Tingxue, GU Junyuan, AN Jin, LIU Yudong. Reliability analysis of a missile control system by fusing uncertain information [J]. Systems Engineering and Electronics, 2017, 39(12): 2869-2876. |
| [4] | SHAN Ganlin, ZHANG Zining. Non-myopic sensor scheduling in a single platform for target tracking [J]. Systems Engineering and Electronics, 2014, 36(3): 458-463. |
| [5] | LU Yan-jing, CHENG Ben, CHEN Ying-wu, ZHAO Qing-song. Capability weightiness degree analysis of weaponry system of systems based on BN theory [J]. Journal of Systems Engineering and Electronics, 2012, 34(8): 1605-1612. |
| [6] | SHEN Jia-jie, LIN Feng. Structure learning of Bayesian network using adaptive hybrid Memetic algorithm [J]. Journal of Systems Engineering and Electronics, 2012, 34(6): 1293-1298. |
| [7] | CUI Jian, LI Qiang, LIU Yong, ZONG Da-wei. Fast SVM classification method based on the decision tree [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2558-2563. |
| [8] | ZHU Ming-min,LIU Wei, YANG You-long. Construction algorithm of MPD-JT for Bayesian networks based on full conditional independence [J]. Journal of Systems Engineering and Electronics, 2010, 32(6): 1325-1328. |
| [9] | LIU Si-yuan, JIANG Wan-lu, NIU Hui-feng. Multi-variable decision tree construction method based on principal component analysis and rough set [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1133-1137. |
| [10] | ZHAO Jing-xian, NI Chun-peng, ZHAN Yuan-rui, DU Zi-ping. Combined optimization decision tree algorithm suitable for large scale data-base [J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 583-587. |
| [11] | ZHAO Jing-xian, NI Chun-peng, ZHAN Yuan-rui, DU Zi-ping. Efficient discretization algorithm for continuous attributes [J]. Journal of Systems Engineering and Electronics, 2009, 31(1): 195-199. |
| [12] | ZHAO Jing-xian, NI Chun-peng, ZHAN Yuan-rui, DU Zi-ping. Efficient discretization algorithm for continuous attributes [J]. Journal of Systems Engineering and Electronics, 2009, 31(01): 195-199. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||