Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (9): 2840-2848.doi: 10.12305/j.issn.1001-506X.2022.09.18
• Systems Engineering • Previous Articles Next Articles
UAV formation rapid assembly method based on improved Quatre algorithm
Tianye SUN1, Wei SUN1,*, Jianjun WU2
- 1. School of Aerospace Science and Technology, Xidian University, Xi'an 710071, China
2. The 365th Research Institute, Northwestern Polytechnical University, Xi'an 710129, China
-
Received:2021-07-21Online:2022-09-01Published:2022-09-09 -
Contact:Wei SUN
CLC Number:
Cite this article
Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm[J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848.
share this article
Fig.1
Five unmanned aerial vehicles formation"
Table 1
Unmanned aerial vehicle constraint parameters"
| 参数 | 速度/(m/s) | 航向角/(°) | 俯仰角/(°) | 加速度/(m/s2) | 航向角速度/(°) | 俯仰角速度/(°) |
| 最小参数 | 30 | -180 | 45 | -0.7 | -15 | -15 |
| 最大参数 | 50 | 180 | 135 | 0.7 | 15 | 15 |
Table 2
Basic parameters setting of each algorithm"
| 算法 | 参数设置 |
| Pro-DE | 变异概率0.4, 交叉概率0.6 |
| DE | 变异概率0.6, 交叉概率0.6 |
| GA | 交叉概率0.3, 变异概率0.1 |
| PSO | 权重1, 学习系数0.5 |
| Quatre | 步长0.7 |
| IQuatre | 步长0.7 |

Fig.2
Trajectory diagram of the formation of 5 unmanned aerial vehicles with different algorithms"

Table 3
Calculation time of multi-unmanned aerial vehicle formations with different algorithms s"
| 算法 | 5架无人机 | 15架无人机 | 25架无人机 |
| IQuatre | 20 | 57 | 89 |
| Quatre | 21 | 59 | 94 |
| Pro-DE | 28 | 80 | 127 |
| DE | 39 | 115 | 186 |
| GA | 37 | 108 | 181 |
| PSO | 78 | 232 | 389 |
Table 4
Maximum position error of unmanned aerial vehicle 5 with different algorithms m"
| 算法 | IQuatre | Quatre | Pro-DE | DE | GA | PSO |
| 距离 | 1.62 | 2.07 | 2.93 | 3.78 | 19.8 | 1.95 |
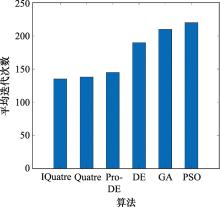
Fig.3
Average number of iterations for different algorithms"
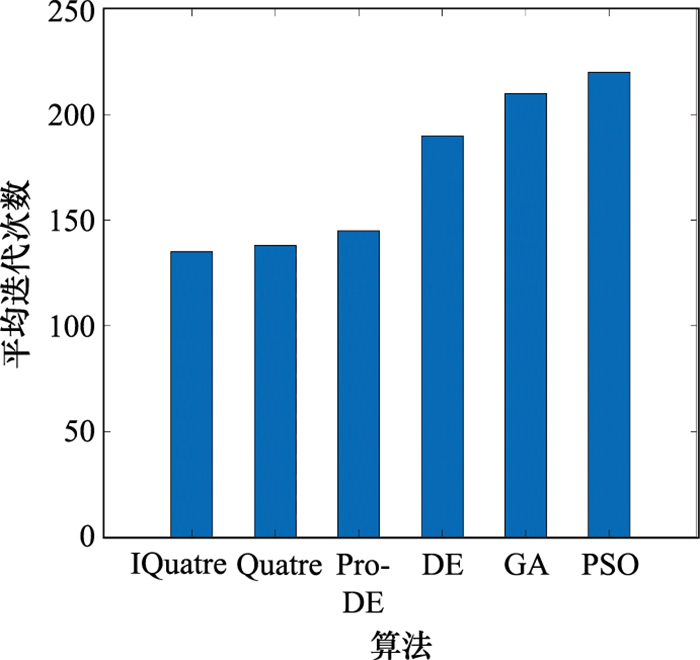
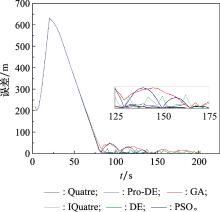
Fig.4
Distance between the 5th unmanned aerial vehicle and the desired position"
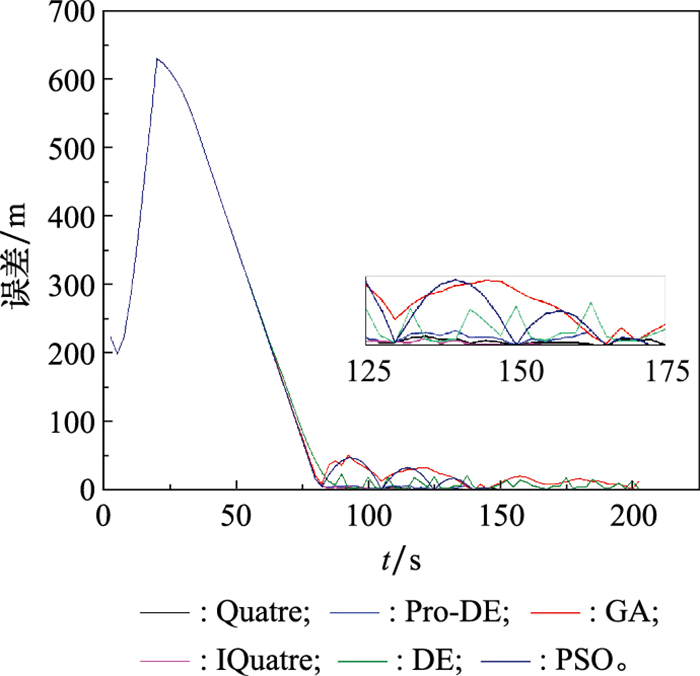
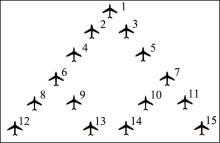
Fig.5
15 unmanned aerial vehicles formation"
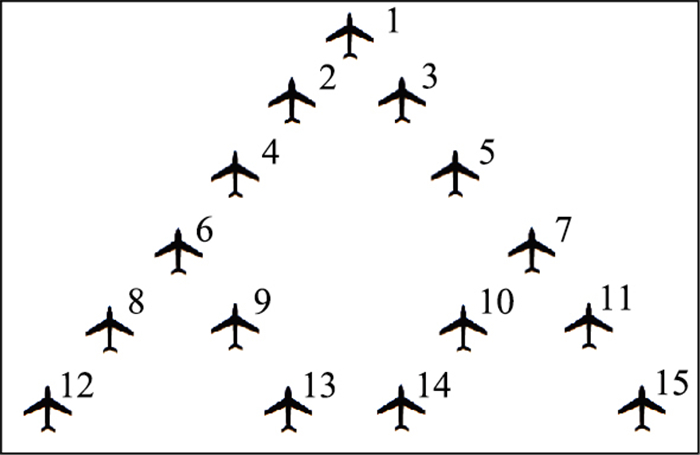

Fig.6
Trajectory diagram of 15 unmanned aerial vehicles formations with different algorithms"

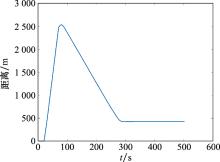
Fig.7
Distance between formation 1 and formation 3"


Fig.8
Distance between the 15th unmanned aerial vehicle and the desired position"
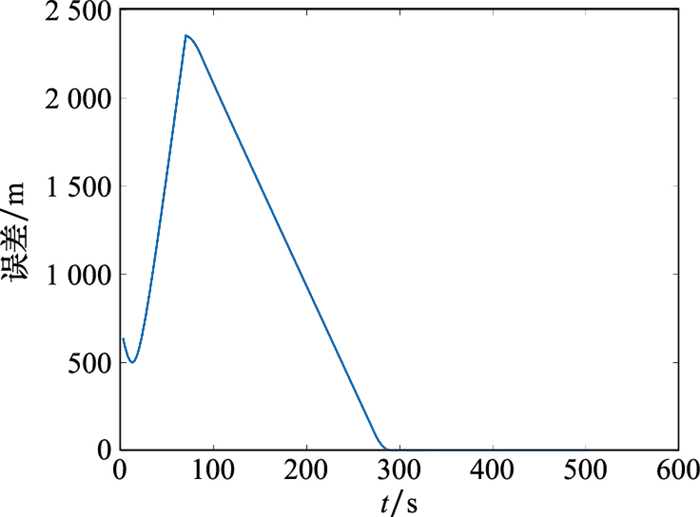
Table 5
Maximum position error of unmanned aerial vehicle after formation assembly with different algorithms m"
| 算法 | IQuatre | Quatre | Pro-DE | DE | GA | PSO |
| 距离 | 1.7 | 2.02 | 3.12 | 11.03 | 24.14 | 2.99 |
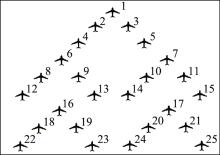
Fig.9
25 unmanned aerial vehicles formation"
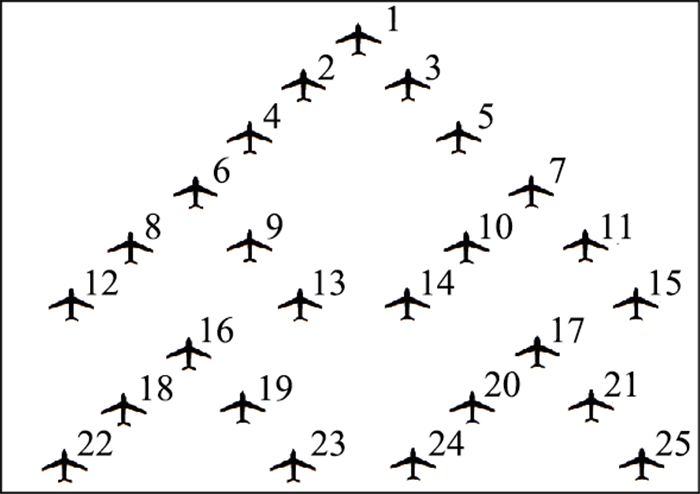
Fig.10
25 unmanned aerial vehicles formation trajectory"
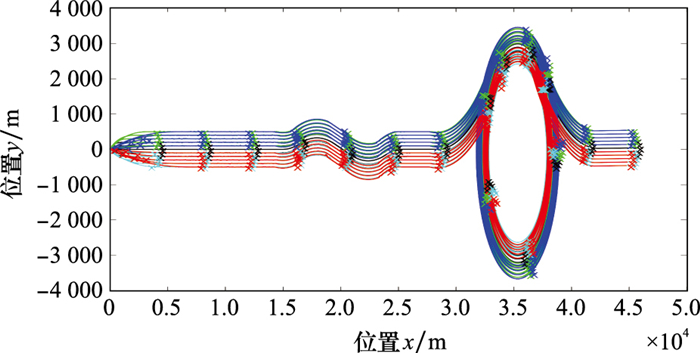
Fig.11
Part of the time node graph after removing the trajectory"
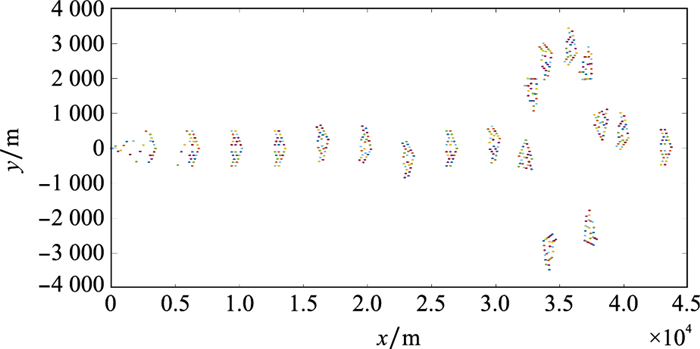
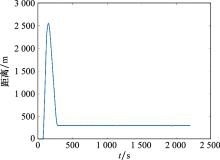
Fig.12
Distance between formation 3 and formation 5"
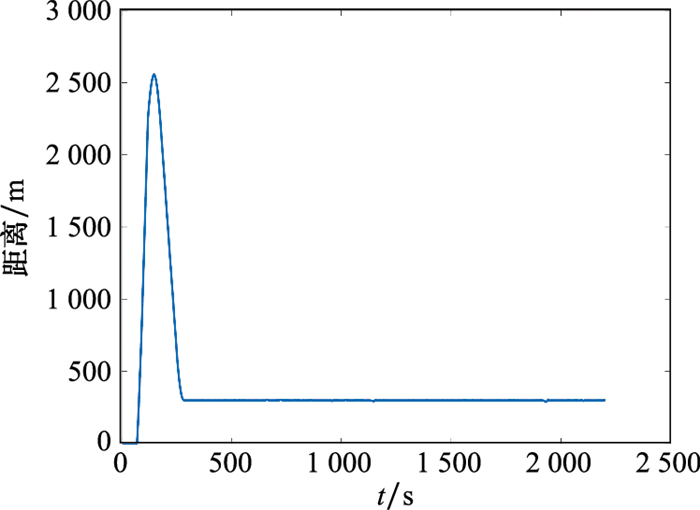
Fig.13
Distance between the 25th unmanned aerial vehicle and the desired position"
| 1 | MICHAEL N , MELLINGER D , LINDSEY Q , et al. The GR-ASP multiple micro-UAV testbed[J]. IEEE Robotics & Automation Magzine, 2010, 17 (3): 56- 65. |
| 2 |
BOSSE M , ZLOT R , FLICK P . Zebedee: design of a spring-mounted 3-D range sensor with application to mobile mapping[J]. IEEE Trans.on Robotics, 2012, 28 (5): 1104- 1119.
doi: 10.1109/TRO.2012.2200990 |
| 3 | YANG X B , WANG T M , LIANG J H , et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft: aquatic unmanned aerial vehicle (AquaUAV)[J]. Progress in Aerospace Sciences, 2015, 74 (4): 131- 151. |
| 4 |
WANG X , YADAV V , BALAKRISHNAN S N . Cooperative UAV formation flying with obstacle/collision avoidance[J]. IEEE Trans.on Control Systems Technology, 2007, 15 (4): 672- 679.
doi: 10.1109/TCST.2007.899191 |
| 5 | CABALLERO F , MERINO L , FERRUZ J , et al. Vision based odometry and SLAM for medium and high altitude flying UAVs[J]. Journal of Intelligent & Robotic Systems, 2009, 54 (1-3): 137- 161. |
| 6 | TIRIAN O G . Drone for military applications[J]. Annals of the Faculty of Engineering Hunedoara International Journal of Engineering, 2014, 12 (4): 239- 241. |
| 7 |
KANG Y , HEDRICK J K . Linear tracking for a fixed wing UAV using nonlinear model predictive control[J]. IEEE Trans.on Control Systems Technology, 2009, 17 (5): 1202- 1210.
doi: 10.1109/TCST.2008.2004878 |
| 8 | JIANG S , JIANG W S . Hierarchical motion consistency constraint for efficient geometrical verification in UAV stereo image matching[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2018, 142 (8): 222- 242. |
| 9 | CHEN T G. A simulative bionic intelligent optimization algorithm: artificial searching swarm algorithm and its performance analysis[C]//Proc. of the IEEE International Joint Conference on Computational Sciences & Optimization, 2009: 864-866. |
| 10 |
SAVKIN A V . Coordinated collective motion of groups of autonomous mobile robots: analysis of Vicsek's model[J]. IEEE Trans.on Automatic Control, 2004, 49 (6): 981- 982.
doi: 10.1109/TAC.2004.829621 |
| 11 | SEILER P, PANT A, HEDRICK K. Analysis of bird formations[C]//Proc. of the 41st IEEE Conference on Decision and Control, 2002: 118-123. |
| 12 |
RAFAEL L G R , RAFAEL L F , SCHACHETTI-PEREIRA R A , et al. Native and exotic distributions of siamweed (Chromolaena odorata) modeled using the genetic algorithm for rule-set production[J]. Weed Science, 2007, 55 (1): 41- 48.
doi: 10.1614/WS-06-083.1 |
| 13 | THARWAT A , ELHOSENY M , HASSANIEN A E , et al. Intelligent Bézier curve based path planning model using chaotic particle swarm optimization algorithm[J]. Cluster Computing, 2019, 22 (4): 4745- 4766. |
| 14 | KATAL N, KUMAR P, NARAYAN S. Design of PIλDμ controller for robust flight control of a UAV using multi-objective bat algorithm[C]//Proc. of the International Conference on Recent Advances in Engineering & Computational Sciences, 2016. |
| 15 |
BIAN L , SUN W , SUN T Y . Trajectory following and improved differential evolution solution for rapid forming of UAV formation[J]. IEEE Access, 2019, 7, 169599- 169613.
doi: 10.1109/ACCESS.2019.2954408 |
| 16 | MENG Z, PAN J S. Quasi affine transformation evolutionary (Quatre) algorithm: a parameter reduced differential evolution algorithm for optimization problems[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2016: 4082-4089. |
| 17 |
ZHANG X Y , DUAN H B . An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning[J]. Applied Soft Computing, 2015, 26, 270- 284.
doi: 10.1016/j.asoc.2014.09.046 |
| 18 |
HAFEZ A T , MARASCO A J , GIVIGI S N , et al. Solving multi-UAV dynamic encirclement via model predictive control[J]. IEEE Trans.on Control Systems Technology, 2015, 23 (6): 2251- 2265.
doi: 10.1109/TCST.2015.2411632 |
| 19 |
DOUGHERTY D , COOPER D . A practical multiple model adaptive strategy for multivariable model predictive control[J]. Control Engineering Practice, 2003, 11 (6): 649- 664.
doi: 10.1016/S0967-0661(02)00170-3 |
| 20 | STEWART B T , VENKAT A N , RAWLINGS J B , et al. Cooperative distributed model predictive control[J]. Journal of Process Control, 2010, 59 (8): 460469. |
| 21 |
LI F , PENG H J , SONG X S , et al. A physics-guided coordinated distributed MPC method for shape control of an antenna reflector[J]. IEEE Trans.on Cybernetics, 2021,
doi: 10.1109/TCYB.2021.3064071 |
| 22 | PAUL T , KROGSTAD T R , GRAVDAHL J T . Modelling of UAV formation flight using 3D potential field[J]. Simulation Modelling Practice & Theory, 2008, 16 (9): 1453- 1462. |
| 23 | STEWART B T , VENKAT A N , RAWLINGS J B , et al. Cooperative distributed model predictive control[J]. Journal of Process Control, 2010, 59 (8): 460- 469. |
| 24 | 魏瑞轩, 吕明海, 茹常剑, 等. 基于DE-DMPC的UAV编队重构防碰撞控制[J]. 系统工程与电子技术, 2014, 36 (12): 2473- 2478. |
| WEI R X , LYU M H , RU C J , et al. Reconfiguration collision avoidance method for UAV's formation based on DE-DMPC[J]. Systems Engineering and Electronics, 2014, 36 (12): 2473- 2478. | |
| 25 | MENG Z , PAN J S , XU H R . Quasi-affine transformation evolutionary (Quatre) algorithim: a cooperative swarm based algorithim for global optimization[J]. Knowledge-Based Systems, 2016, 97, 104- 121. |
| 26 | MENG Z , PAN J S . Quasi-affine transformation evolution with external archive (QUATRE-EAR): an enhanced structure for differential evolution[J]. Knowledge-Based Systems, 2018, 155 (9): 35- 53. |
| 27 |
LIU N , PAN J S , SUN C , et al. An efficient surrogate assisted quasi-affine transformation evolutionary algorithm for expensive optimization problems[J]. Knowledge-Based Systems, 2020, 209, 106418.
doi: 10.1016/j.knosys.2020.106418 |
| 28 | JIANG Z T , LIU S C . Self-calibration of varying internal camera parameters algorithm based on quasi-affine reconstruction[J]. Journal of Computers, 2012, 7 (3): 774- 778. |
| 29 | DENG W , YANG X H , ZOU L , et al. An improved self-adaptive differential evolution algorithm and its application[J]. Chemometrics & Intelligent Laboratory Systems, 2013, 128 (15): 66- 76. |
| 30 |
高岳林, 刘军民. 差分进化算法的参数研究[J]. 黑龙江大学自然科学学报, 2009, 26 (1): 81- 85.
doi: 10.3969/j.issn.1001-7011.2009.01.015 |
|
GAO Y L , LIU J M . Parameter study of differential evolution algorithm[J]. Journal of Natural Science of Heilongjiang University, 2009, 26 (1): 81- 85.
doi: 10.3969/j.issn.1001-7011.2009.01.015 |
| [1] | Xiaowei FU, Zihao CHEN. Cooperative capture control method for multi-UAV based on consensus protocol [J]. Systems Engineering and Electronics, 2021, 43(9): 2501-2507. |
| [2] | Jie HUANG, Wei SUN, Yu GAO. Cooperative searching for the multi-UAVs based on dual-attribute probability model optimization [J]. Systems Engineering and Electronics, 2020, 42(1): 118-127. |
| [3] | LIAN Qingpo, WANG Hongjian, YUAN Jianya, GAO Na, HU Wenyue. USV cluster collision avoidance based on particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2019, 41(9): 2034-2040. |
| [4] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [5] | LIN Juncan, JIA Gaowei, HOU Zhongxi. Research on task assignment of heterogeneous UAV formation in the anti-radar combat [J]. Systems Engineering and Electronics, 2018, 40(9): 1986-1992. |
| [6] | CHEN Jin-dong,PAN Feng. Online support vector machine and genetic algorithm based predictive control [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1275-1280. |
| [7] | LI Xiang, XING Qing-hua, DONG Tao. Deployment optimization of UAV formation based on multi-index orthogonal experimental design [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 331-337. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||