Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (9): 2501-2507.doi: 10.12305/j.issn.1001-506X.2021.09.17
• Systems Engineering • Previous Articles Next Articles
Cooperative capture control method for multi-UAV based on consensus protocol
Xiaowei FU1,*, Zihao CHEN2
- 1. School of Electronics and Information, Northwestern Polytechnical University, Xi'an 710129, China
2. System Design Institute of Hubei Aerospace Technology Academy, Wuhan 430040, China
-
Received:2021-01-11Online:2021-08-20Published:2021-08-26 -
Contact:Xiaowei FU
CLC Number:
Cite this article
Xiaowei FU, Zihao CHEN. Cooperative capture control method for multi-UAV based on consensus protocol[J]. Systems Engineering and Electronics, 2021, 43(9): 2501-2507.
share this article

Fig.1
Topology of communication network for multi unmanned aerial vehicles formation system"


Fig.2
Apollonius circle"


Fig.3
Apollonius ball"


Fig.4
Position of reference Apollo ball and starting Apollo ball"
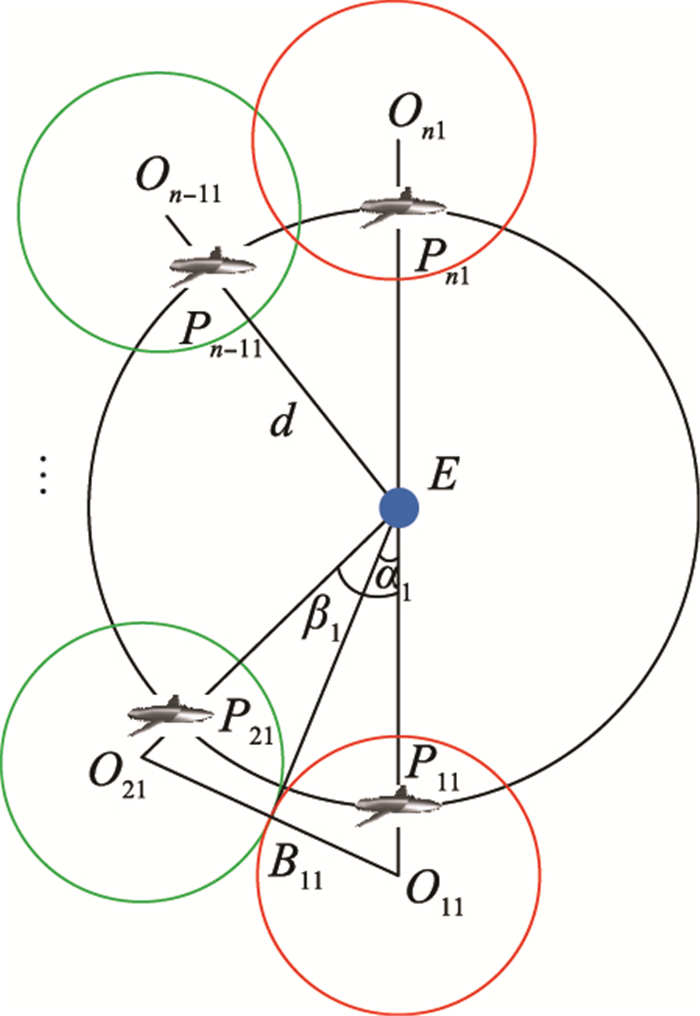

Fig.5
Top view of around Apollo ball"


Fig.6
Capture formation and communication network structure"


Fig.7
Unmanned aerial vehicle formation capture simulation"


Fig.8
Convergence index of unmanned aerial vehicle formation capture"

| 1 |
朱建军, 李冰, 张亚超. 群机器人目标围捕系统设计与性能测试[J]. 实验室研究与探索, 2020, 39 (3): 67- 71.
doi: 10.3969/j.issn.1006-7167.2020.03.014 |
|
ZHU J J , LI B , ZHANG Y C . Design and performance test of target capture system for swarm robots[J]. Research and Exploration in Laboratory, 2020, 39 (3): 67- 71.
doi: 10.3969/j.issn.1006-7167.2020.03.014 |
|
| 2 | YU J L , DONG X W , LI Q D , et al. Distributed cooperative encirclement hunting guidance for multiple flight vehicles system[J]. Aerospace Science and Technology, 2019, 95 (11): 105475. |
| 3 |
SAHA S . A prey-predator system with disease in prey and coope-rative hunting strategy in predator[J]. Journal of Physics A: Mathematical and Theoretical, 2020, 53 (48): 333- 359.
doi: 10.1088/1751-8121/abbc7b |
| 4 |
BI F K , LEI M Y , WANG Y P . Context-aware MDNet for target tracking in UAV remote sensing videos[J]. International Journal of Remote Sensing, 2020, 41 (10): 3784- 3797.
doi: 10.1080/01431161.2019.1708500 |
| 5 | QIU H F , YANG F W . Distributed H∞-consensus filtering for target state tracking over a wireless filter network with switch-ing topology, channel fading and packet dropouts[J]. Neurocomputing, 2020, 400 (19): 401- 411. |
| 6 |
SHAN G L , XU G G , QIAO C L . A non-myopic scheduling method of radar sensors for maneuvering target tracking and radiation control[J]. Defence Technology, 2020, 16 (1): 242- 250.
doi: 10.1016/j.dt.2019.10.001 |
| 7 | GU K , WANG Y L , SHEN Y . Cooperative detection by multi-agent networks in the presence of position uncertainty[J]. IEEE Trans.on Signal Processing, 2020, 68 (1): 5411- 5426. |
| 8 |
MATZLIACH B , BEN-GAL I , KAGAN E . Cooperative detection of multiple targets by the group of mobile agents[J]. Entropy, 2020, 22 (5): 512- 530.
doi: 10.3390/e22050512 |
| 9 |
LI Z X , MENG C , ZHOU F G , et al. Fast vision-based autonomous detection of moving cooperative target for unmanned aerial vehicle landing[J]. Journal of Field Robotics, 2019, 36 (1): 34- 48.
doi: 10.1002/rob.21815 |
| 10 |
CARDONA G A , CALDERON J M . Robot swarm navigation and victim detection using rendezvous consensus in search and rescue operations[J]. Applied Sciences, 2019, 9 (8): 1702- 1720.
doi: 10.3390/app9081702 |
| 11 |
DUAN H B , XIN L , CHEN S J . Robust cooperative target detection for a vision-based UAVs autonomous aerial refueling platform via the contrast sensitivity mechanism of eagle's eye[J]. IEEE Aerospace and Electronic Systems Magazine, 2019, 34 (3): 18- 30.
doi: 10.1109/MAES.2019.2900178 |
| 12 |
DI K , YANG S F , WANG W Y , et al. Optimizing evasive strategies for an evader with imperfect vision capacity[J]. Journal of Intelligent & Robotic Systems, 2019, 96 (3): 419- 437.
doi: 10.1007/s10846-019-00996-1 |
| 13 |
LOPEZ V G , LEWIS F L , WAN Y , et al. Solutions for multiagent pursuit-evasion games on communication graphs: finite-time capture and asymptotic behaviors[J]. IEEE Trans.on Automatic Control, 2020, 65 (5): 1911- 1923.
doi: 10.1109/TAC.2019.2926554 |
| 14 | ISLER V , KANNAN S . Randomized pursuit-evasion with local visibility[M]. Philadelphia: Society for Industrial and Applied Mathematics, 2006. |
| 15 | PENG Z, YI S, SHI H C. Sensor network assisted collaboration for pursuit-evasion problem[C]//Proc. of the International Conference on Pervasive Services, 2006: 235-238. |
| 16 | 付光远, 李源. 多移动机器人动态联盟围捕策略[J]. 计算机应用, 2019, 39 (S1): 1- 7. |
| FU G Y , LI Y . Dynamic alliance pursuit strategy for multiple mobile robots[J]. Journal of Computer Applications, 2019, 39 (S1): 1- 7. | |
| 17 |
付光远, 李源, 付文宇, 等. 改进合同网在多机器人围捕任务分配中的应用[J]. 兵器装备工程学报, 2019, 40 (3): 98- 102.
doi: 10.11809/bqzbgcxb2019.03.022 |
|
FU G Y , LI Y , FU W Y , et al. Application of improved contract net on pursuit assignment allocation for multiple mobile robots[J]. Journal of Ordnance Equipment Engineering, 2019, 40 (3): 98- 102.
doi: 10.11809/bqzbgcxb2019.03.022 |
|
| 18 | 方宝富, 潘启树, 洪炳镕, 等. 多追捕者-单一逃跑者追逃问题实现成功捕获的约束条件[J]. 机器人, 2012, (3): 282- 291. |
| FANG B F , PAN Q S , HONG B R , et al. Constraint conditions of successful capture in multi-pursuers vs one-evader games[J]. Robot, 2012, (3): 282- 291. | |
| 19 |
FANG B F , PAN Q S , HONG B R , et al. Research on high speed evader vs multi lower speed pursuers in multi pursuit-evasion games[J]. Information Technology Journal, 2012, 11 (8): 989- 997.
doi: 10.3923/itj.2012.989.997 |
| 20 |
SAHA S . A prey-predator system with disease in prey and cooperative hunting strategy in predator[J]. Journal of Physics A: Mathematical and Theoretical, 2020, 53 (48): 485601.
doi: 10.1088/1751-8121/abbc7b |
| 21 | KOBAYASHI Y , OTSUBO K , HOSOE S . Autonomous decentralized control of capturing behavior by multiple mobile robots[J]. Transactions of the Society of Instrument & Control Engineers, 2013, 43 (8): 663- 671. |
| 22 | LIANG X , WANG H L , LUO H T . Collaborative pursuit-evasion strategy of UAV/UGV heterogeneous system in complex three-dimensional polygonal environment[J]. Complexity, 2020, 20 (7): 7498740. |
| 23 | WANG Y Z , WANG D W , ZHU S Q . Cooperative moving path following for multiple fixed-wing unmanned aerial vehicles with speed constraints[J]. Automatica, 2019, 100 (1): 82- 89. |
| 24 |
HU J W , WANG M , ZHAO C H , et al. Formation control and collision avoidance for multi-UAV systems based on Voronoi partition[J]. Science China Technological Sciences, 2020, 63 (1): 65- 72.
doi: 10.1007/s11431-018-9449-9 |
| 25 |
PAN H , NIAN X H , GUO L . Second-order consensus in multi-agent systems based on second-order neighbours' information[J]. International Journal of Systems Science, 2014, 45 (5): 902- 914.
doi: 10.1080/00207721.2012.742596 |
| 26 | JI B F , CHEN Z Z , LI Y Q , et al. Energy harvesting and information transmission scheme with UAV relay cooperation[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 19 (1): 278- 286. |
| 27 |
HUANG Y , TANG J , LAO S Y . UAV group formation collision avoidance method based on second-order consensus algorithm and improved artificial potential field[J]. Symmetry, 2019, 11 (9): 1162- 1170.
doi: 10.3390/sym11091162 |
| 28 | AMIT K , APARAJITA O . Experimental evaluation of certain pursuit and evasion schemes for wheeled mobile robots[J]. International Journal of Automation and Computing, 2019, 9 (4): 491- 510. |
| 29 | RAMANA M V , MANGAL K . Pursuit-evasion games of high-speed evader[J]. Journal of Intelligent & Robotic Systems Theory & Application, 2017, 85 (2): 293- 306. |
| 30 | SOUIDI M E H , SIAM A , PEI Z , et al. Multi-agent pursuit-evasion game based on organizational architecture[J]. Journal of Computing and Information Technology, 2019, 27 (1): 1- 11. |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jinlin ZHANG, Jiong LI, Humin LEI, Wanli LI, Xiao TANG. Capture region of 3D realistic true proportional navigation with finite overload [J]. Systems Engineering and Electronics, 2022, 44(3): 986-997. |
| [3] | Xiaowei FU, Zihao CHEN. Design of control method for multi-UAV cooperative detection of fast target [J]. Systems Engineering and Electronics, 2021, 43(11): 3295-3304. |
| [4] | Wanli LI, Jiong LI, Humin LEI, Changxin LUO, Shijie LI. Analysis of capture region based on sliding mode variable structure guidance law [J]. Systems Engineering and Electronics, 2021, 43(11): 3321-3329. |
| [5] | FANG Xueyi, LIU Junxian, ZHOU Deyun. Background interpolation for on-line simulation of capture zone of air-to-air missiles [J]. Systems Engineering and Electronics, 2019, 41(6): 1286-1293. |
| [6] | LIN Juncan, JIA Gaowei, HOU Zhongxi. Research on task assignment of heterogeneous UAV formation in the anti-radar combat [J]. Systems Engineering and Electronics, 2018, 40(9): 1986-1992. |
| [7] | ZHOU Jin, LEI Humin. Interception capability analysis of the true proportional navigation guidance law against hypersonic targets#br# [J]. Systems Engineering and Electronics, 2018, 40(10): 2296-2304. |
| [8] | LUO Xusheng, JING Wuxing, GAO Changsheng. Error propagation analysis of capture for Mars exploration [J]. Systems Engineering and Electronics, 2017, 39(7): 1590-1595. |
| [9] | LI Xiang, XING Qing-hua, DONG Tao. Deployment optimization of UAV formation based on multi-index orthogonal experimental design [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 331-337. |
| [10] | YE Ji-kun, LEI Hu-min, WANG Fei, LI Jiong. Capture capability of DGG against maneuvering targets [J]. Journal of Systems Engineering and Electronics, 2011, 33(5): 1098-. |
| [11] | YE Ji-kun,LEI Hu-min,LI Jiong,WANG Fei. Capture condition analysis of differential geometric guidance laws [J]. Journal of Systems Engineering and Electronics, 2010, 32(11): 2403-2406. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||