Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (11): 3779-3791.doi: 10.12305/j.issn.1001-506X.2025.11.25
• Guidance, Navigation and Control • Previous Articles
Encoder fault tolerance method based on angle residual observer
Jialin LI1, Zhen CHEN1, Hengzai HU1,*, Jinhua ZHOU2, Jie CHEN2, Xiangdong LIU1
- 1. School of Automation,Beijing Institute of Technology,Beijing 100080,China
2. Beijing Research Institute of Precise Mechatronic Controls,Beijing 100163,China
-
Received:2024-11-21Online:2025-11-25Published:2025-12-08 -
Contact:Hengzai HU
CLC Number:
Cite this article
Jialin LI, Zhen CHEN, Hengzai HU, Jinhua ZHOU, Jie CHEN, Xiangdong LIU. Encoder fault tolerance method based on angle residual observer[J]. Systems Engineering and Electronics, 2025, 47(11): 3779-3791.
share this article
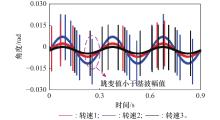
Fig.1
Impact of speed on the jump value in angle differential"
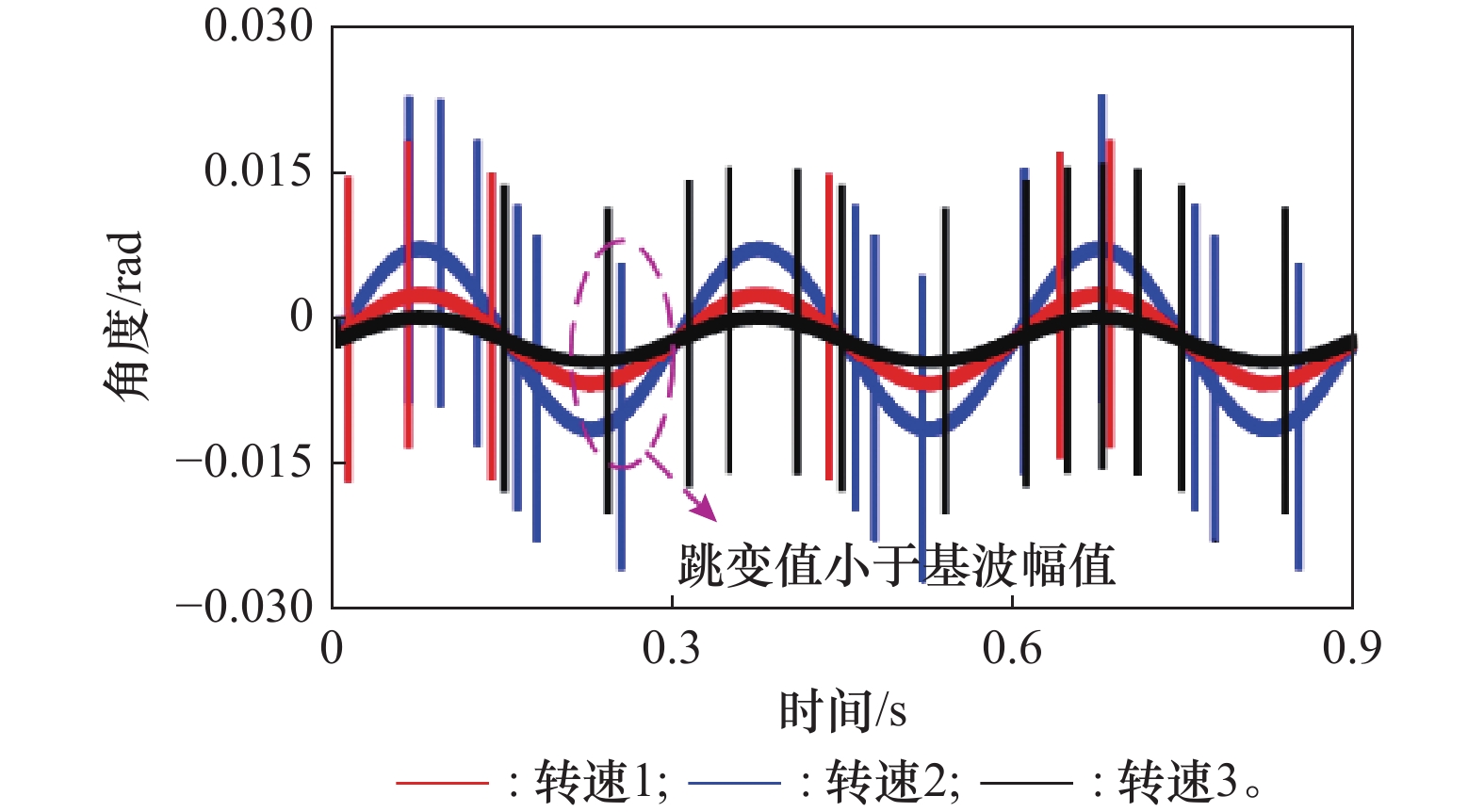

Fig.2
Single-loop cyclic Gray code disk"
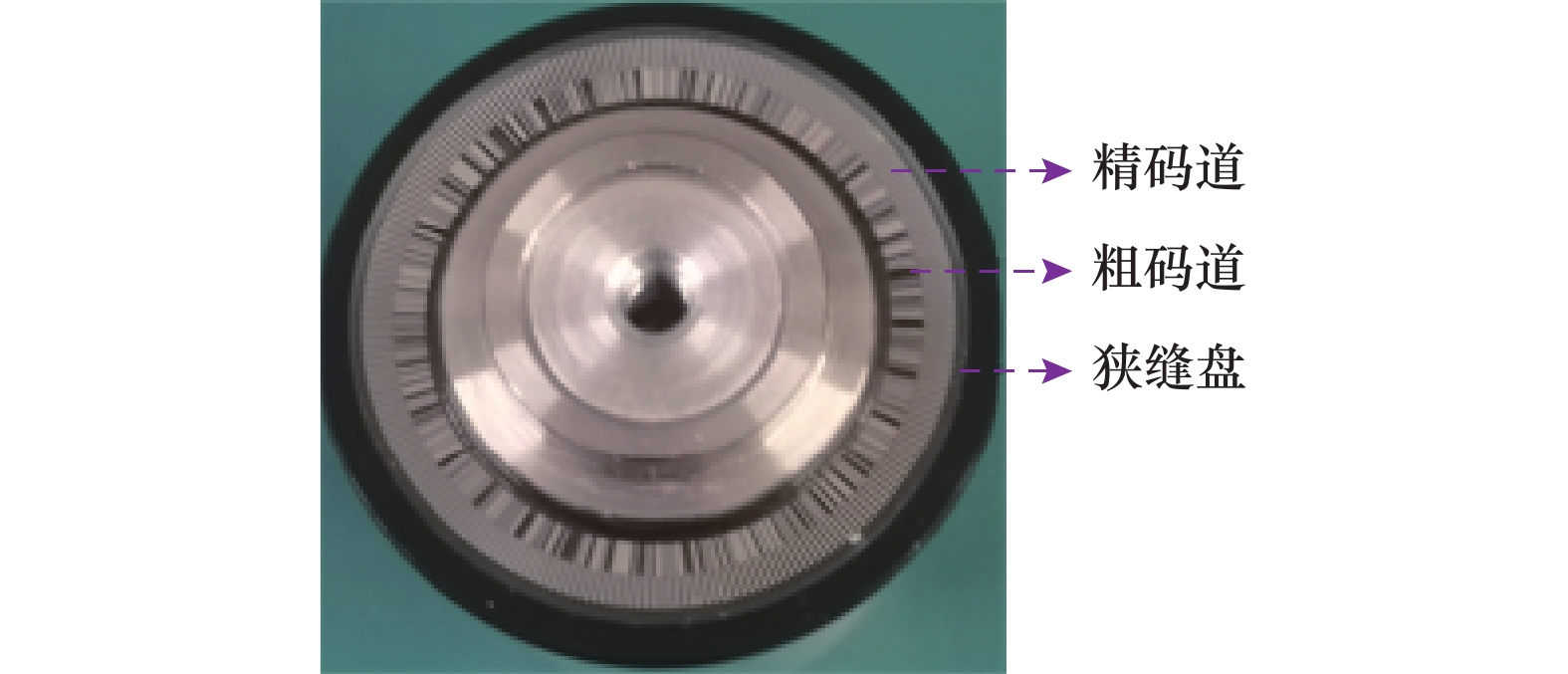

Fig.3
Single bit fault mode"
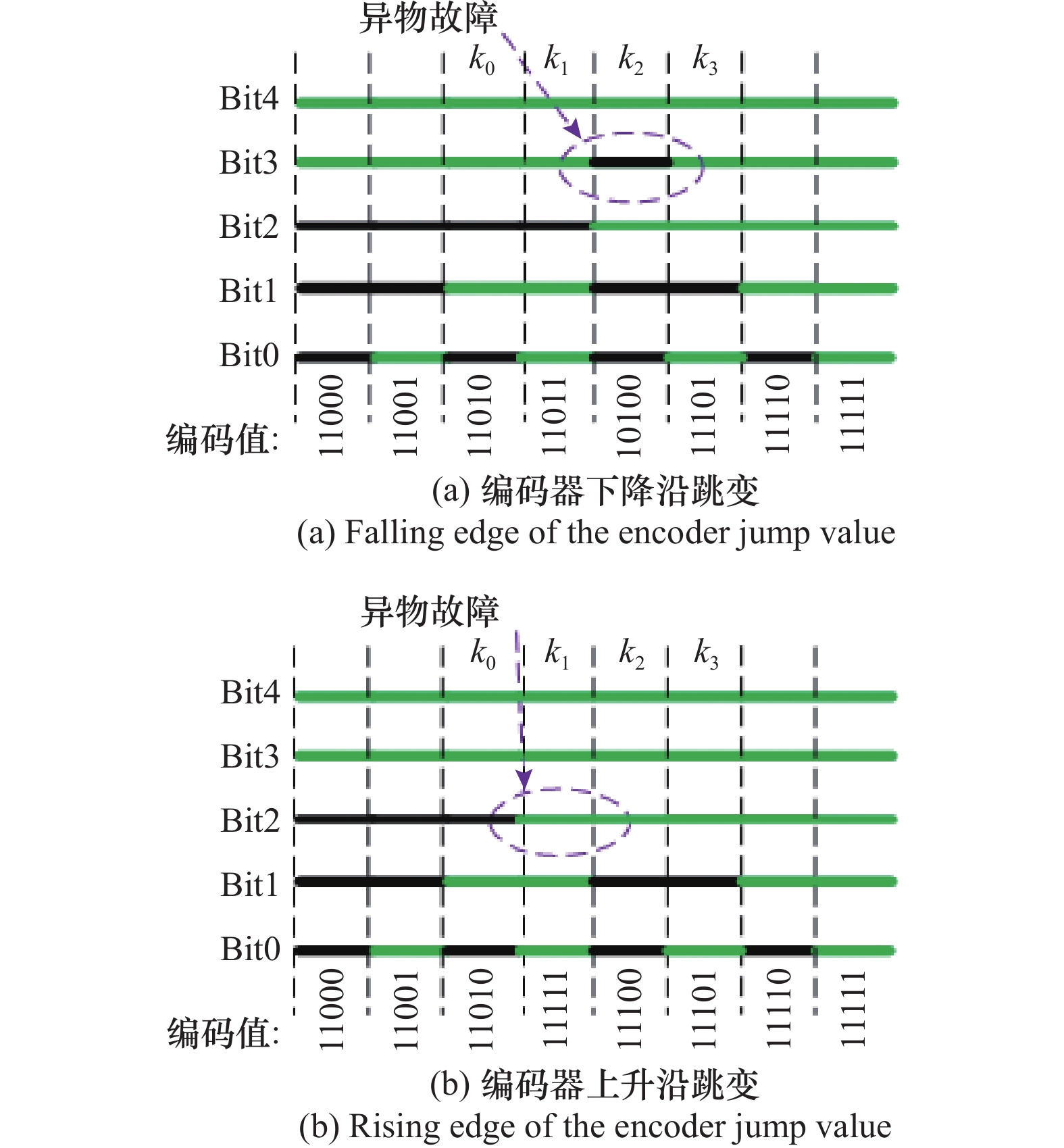

Fig.4
Different bits fault mode"


Fig.5
Multiple bits fault mode"


Fig.6
Angle bit faule tolerance method system block diagram"
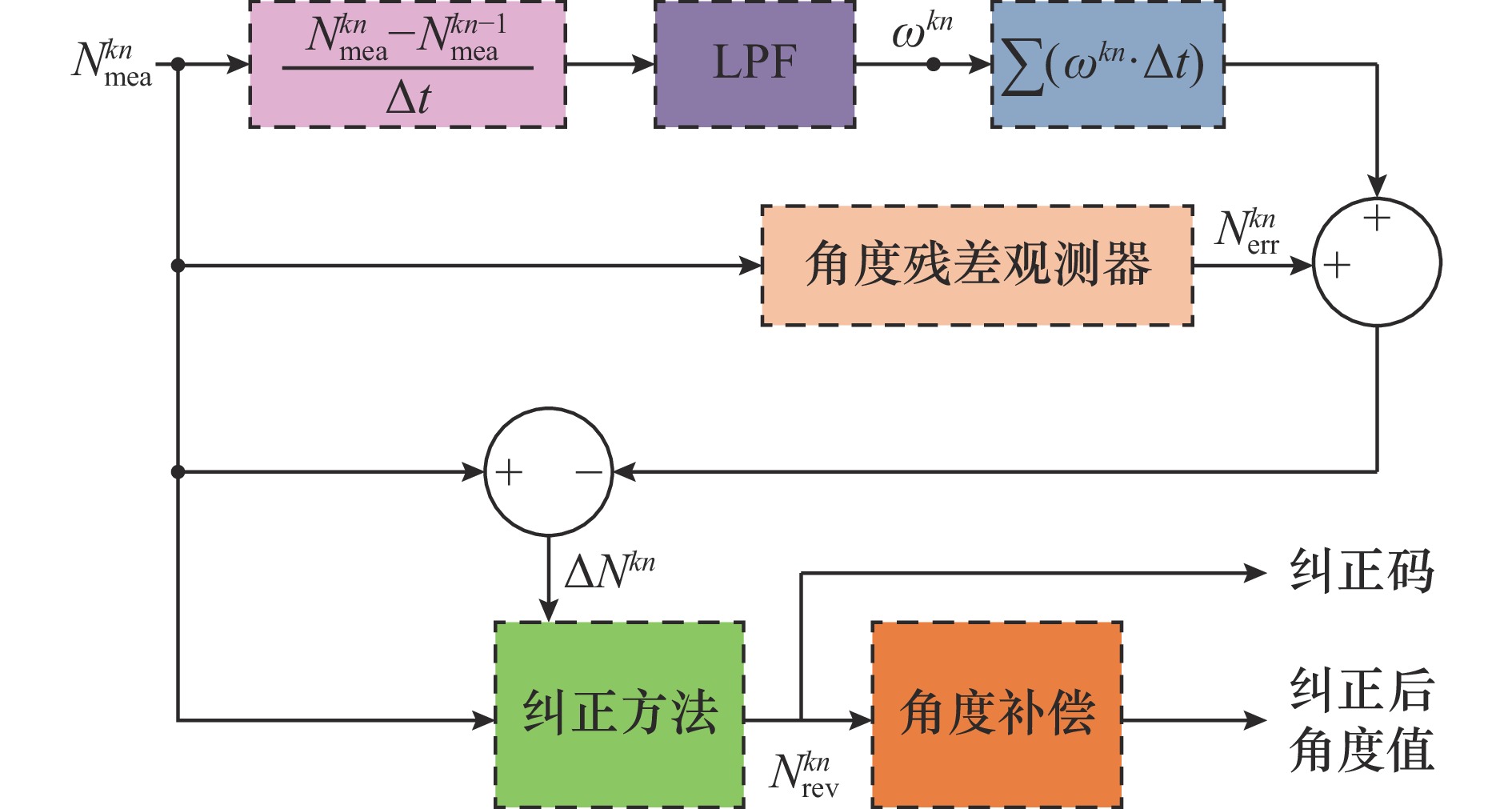

Fig.7
Angle residual observer block diagram"


Fig.8
Angle currection method"
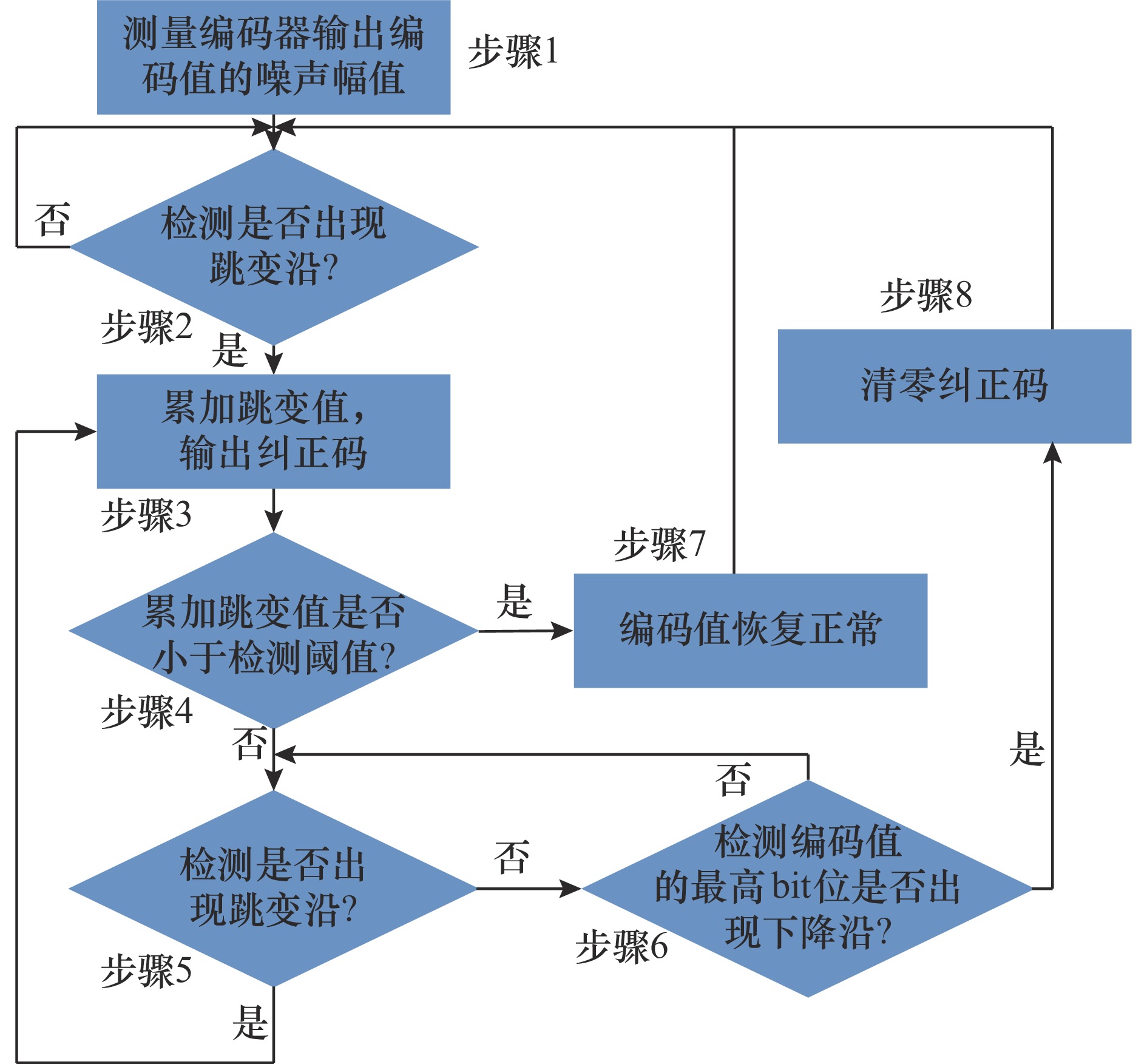

Fig.9
Simulation results of the correction value and the revised angle value for single bit fault"


Fig.10
Simulation results of different bits fault"


Fig.11
Simulation results of multiple bits fault"


Fig.12
Impact of angle residual observer on correction strategy"


Fig.13
Impact of observer on the angle differential value"
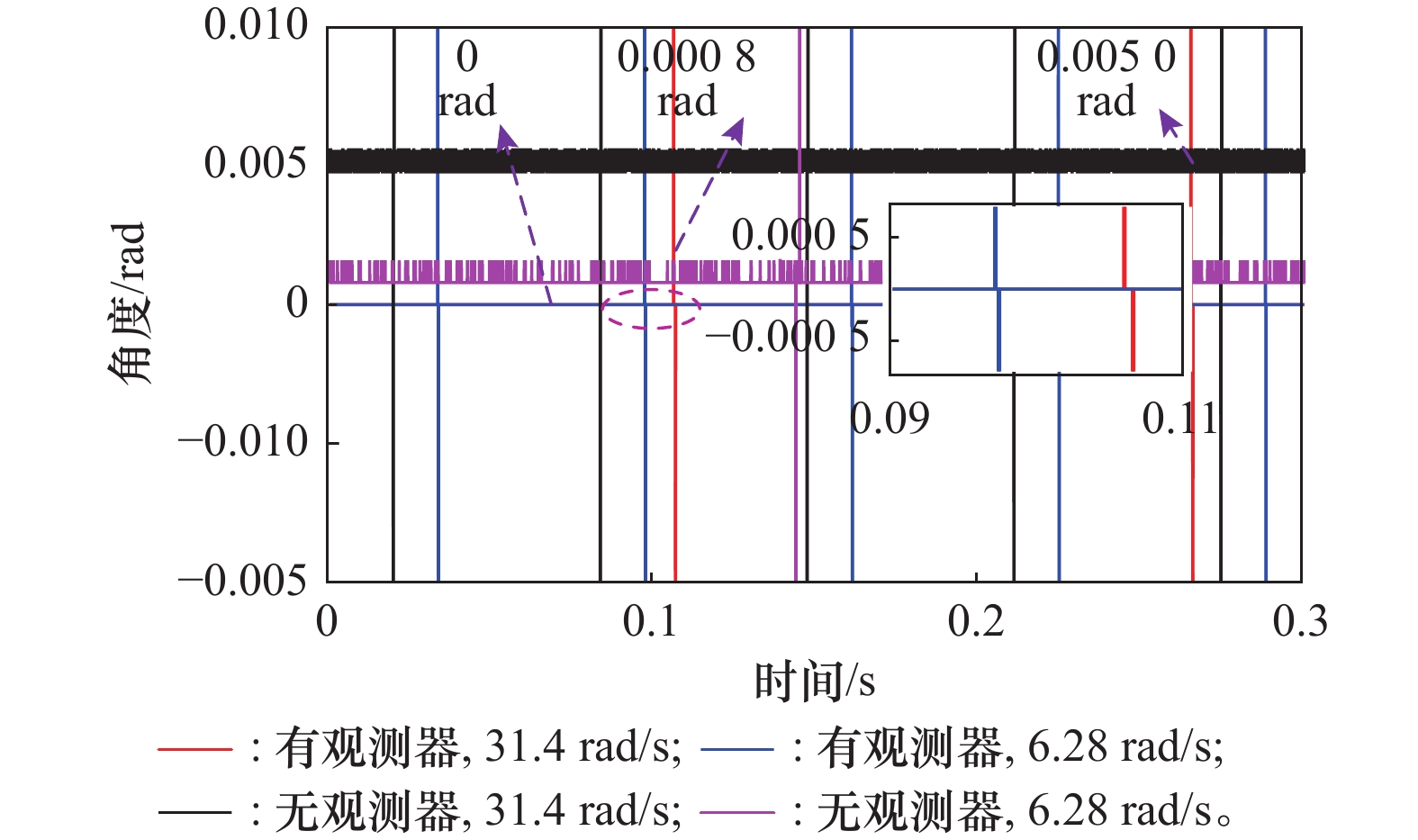

Fig.14
Experimental platform"
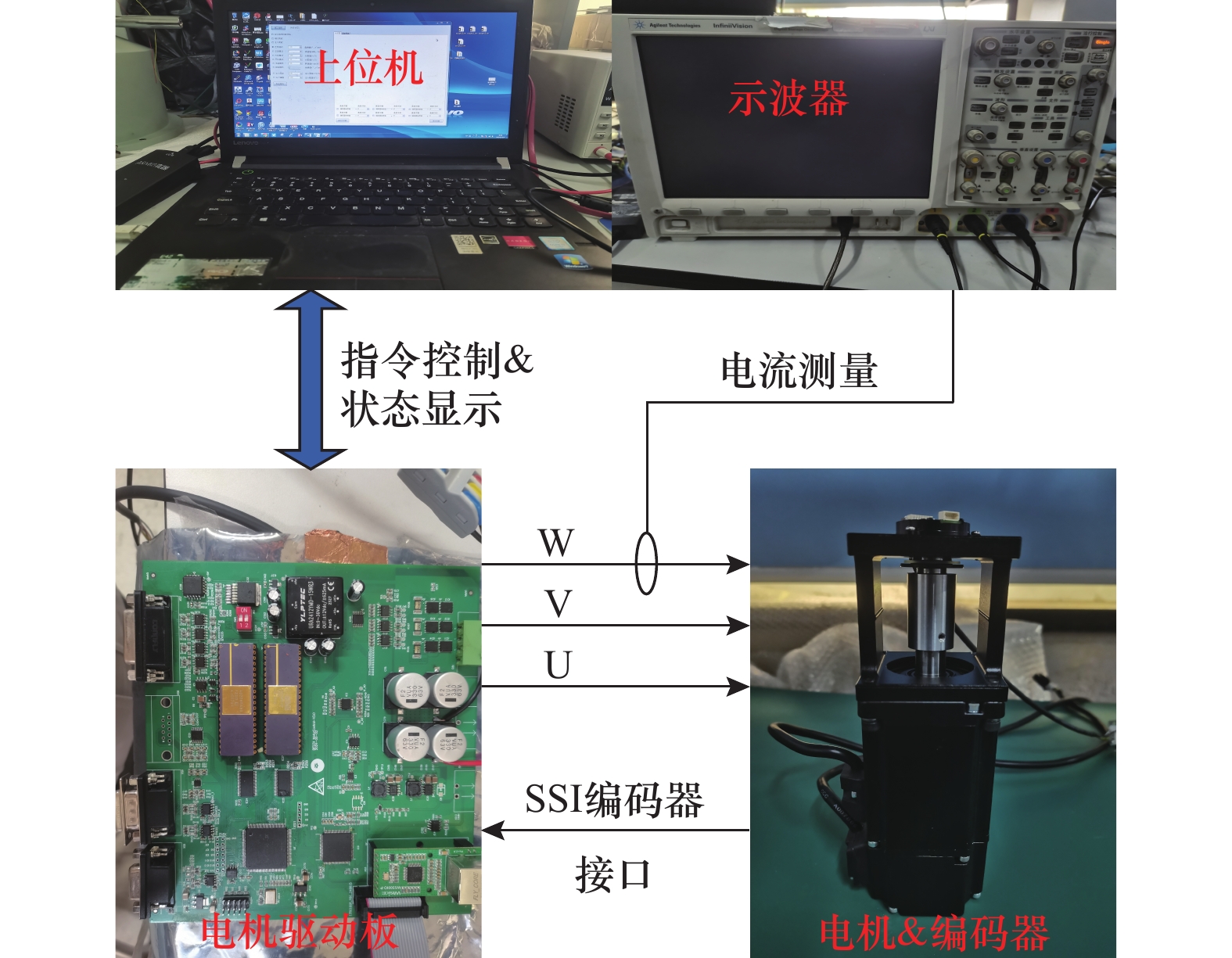

Fig.15
Angle encoder code disk fault"
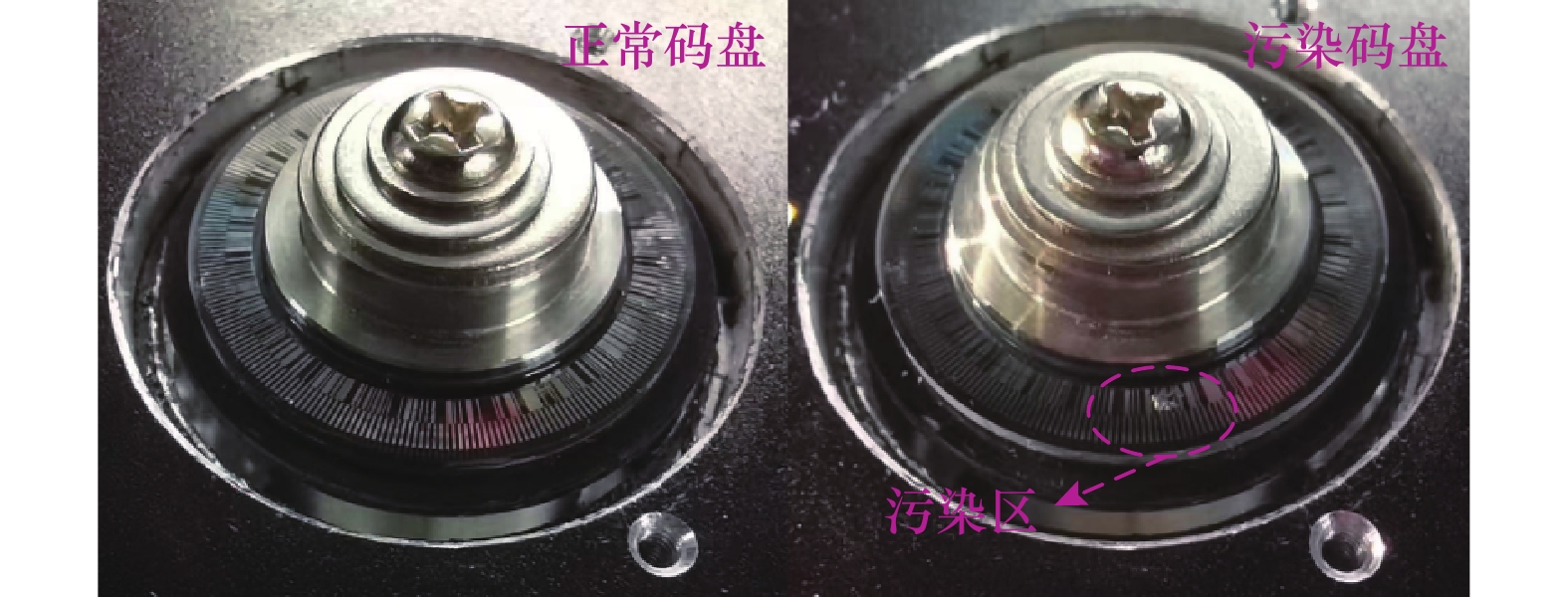

Fig.16
Bit fault correction under three different speed conditions"

Fig.17
Impact of angle residual observer on angle differential value at different speed"
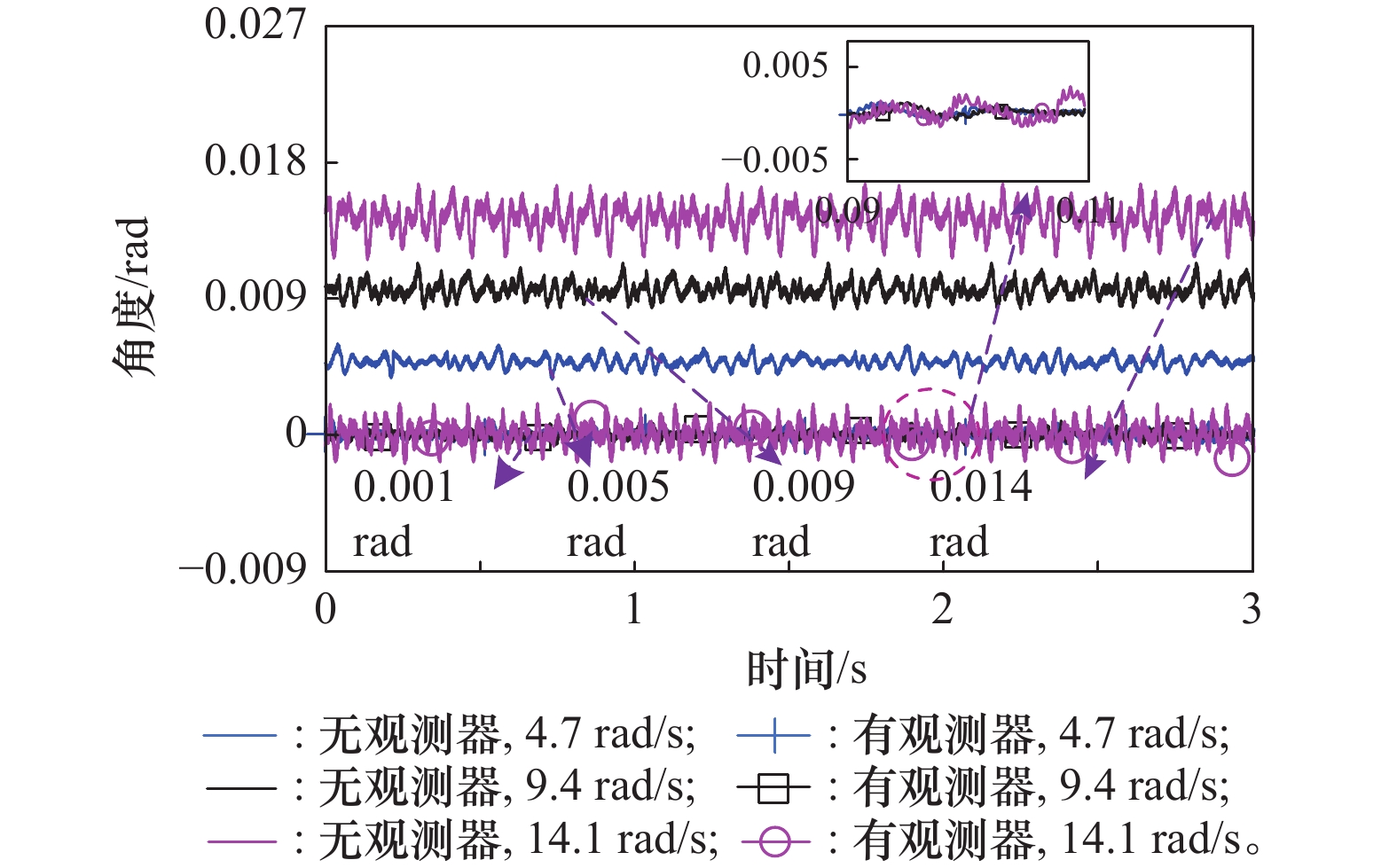
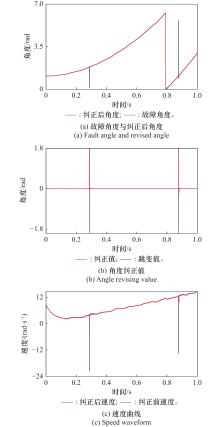
Fig.18
Bit fault correction under acceleration condition"
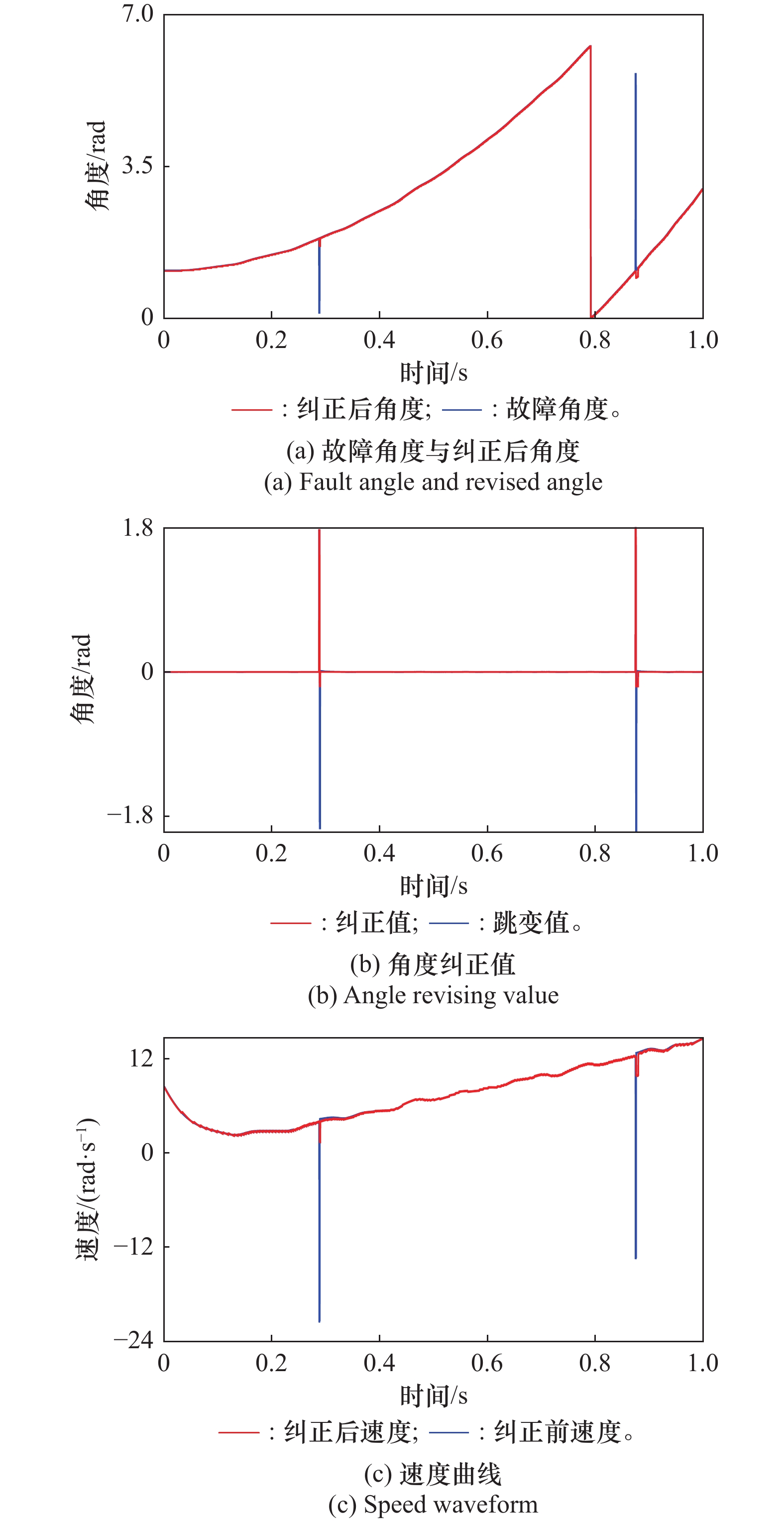

Fig.19
Bit fault correction under deceleration condition"
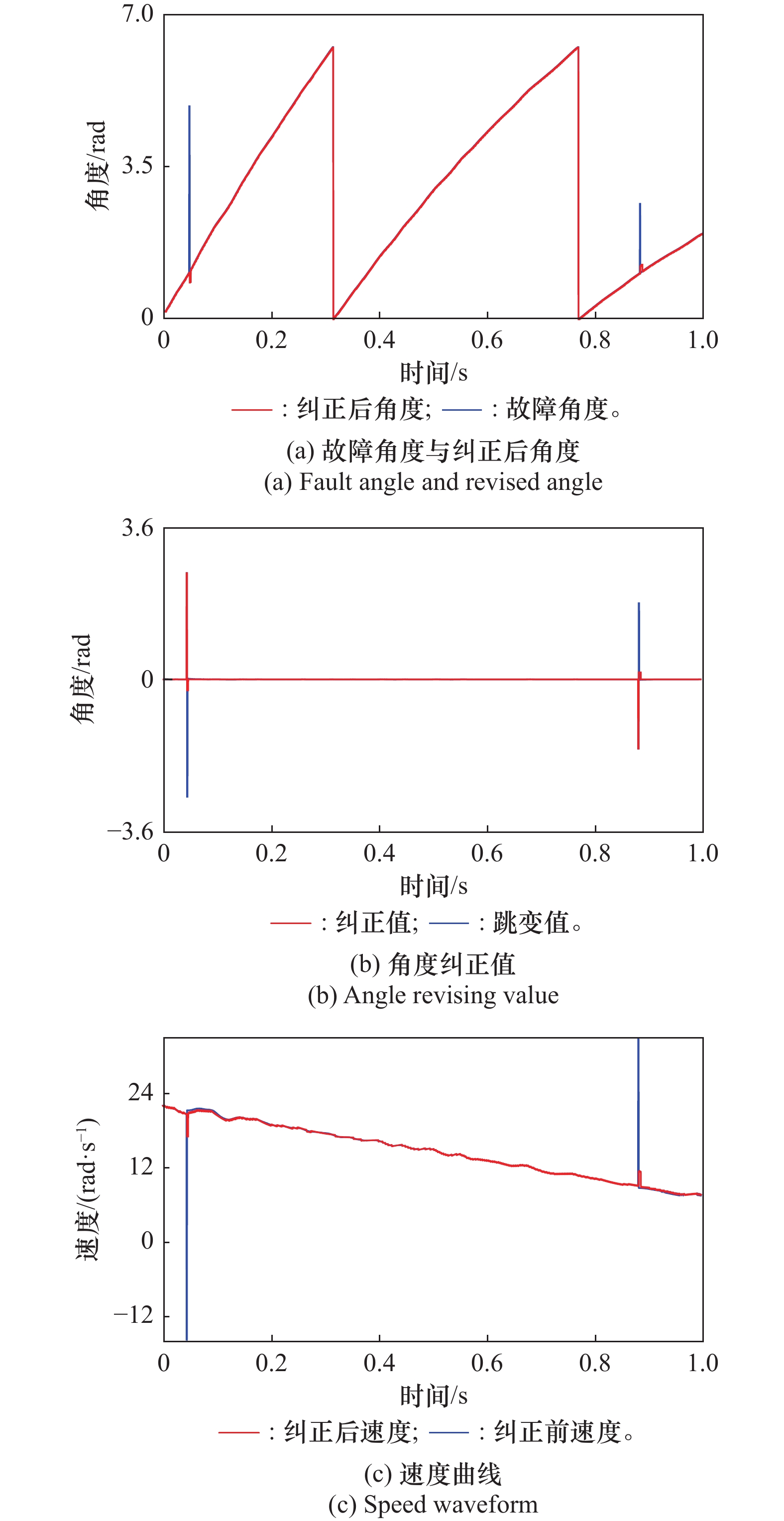

Fig.20
Bit fault correction under acceleration and deceleration condition"
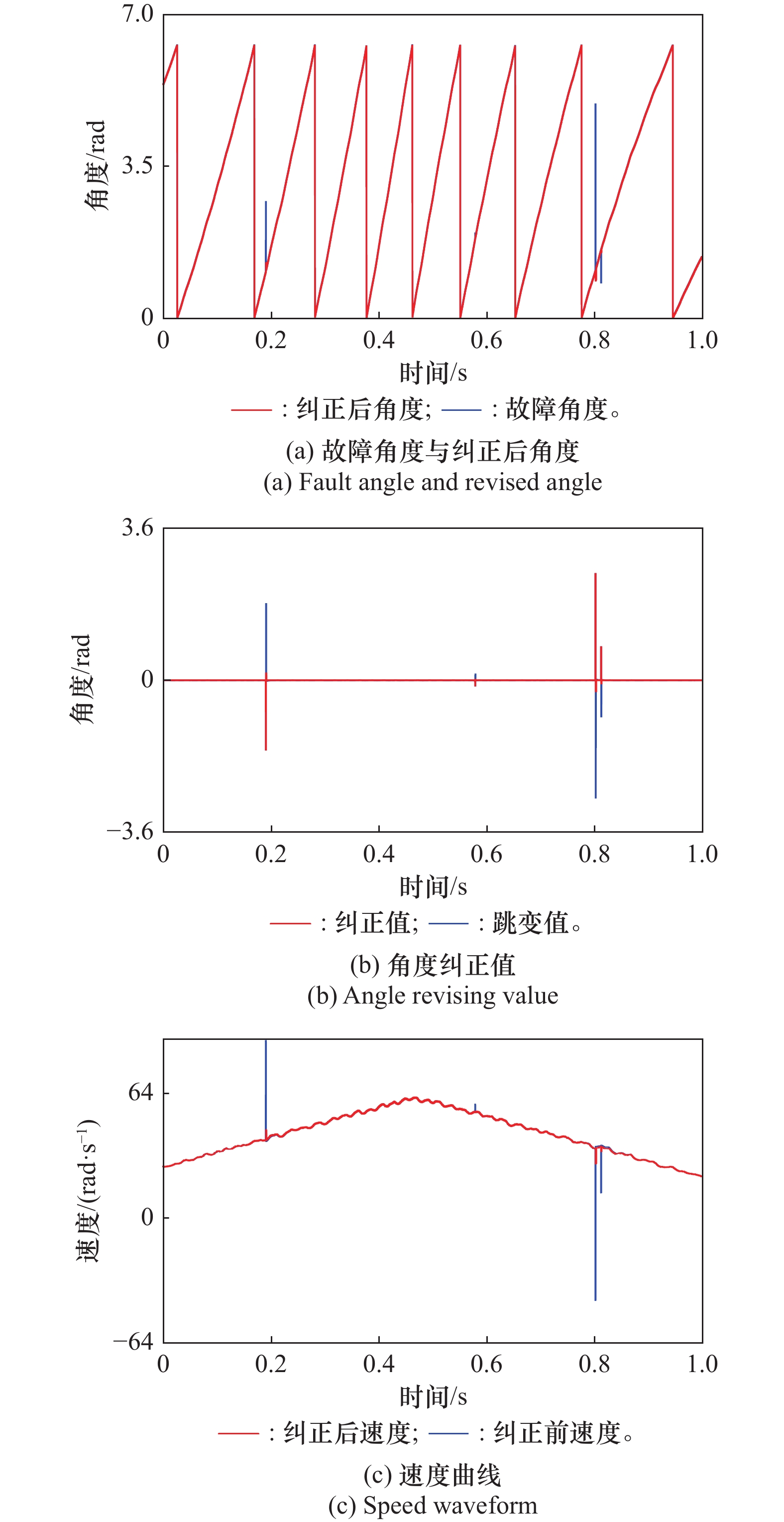

Fig.21
Bit fault correction under 600 rpm condition"
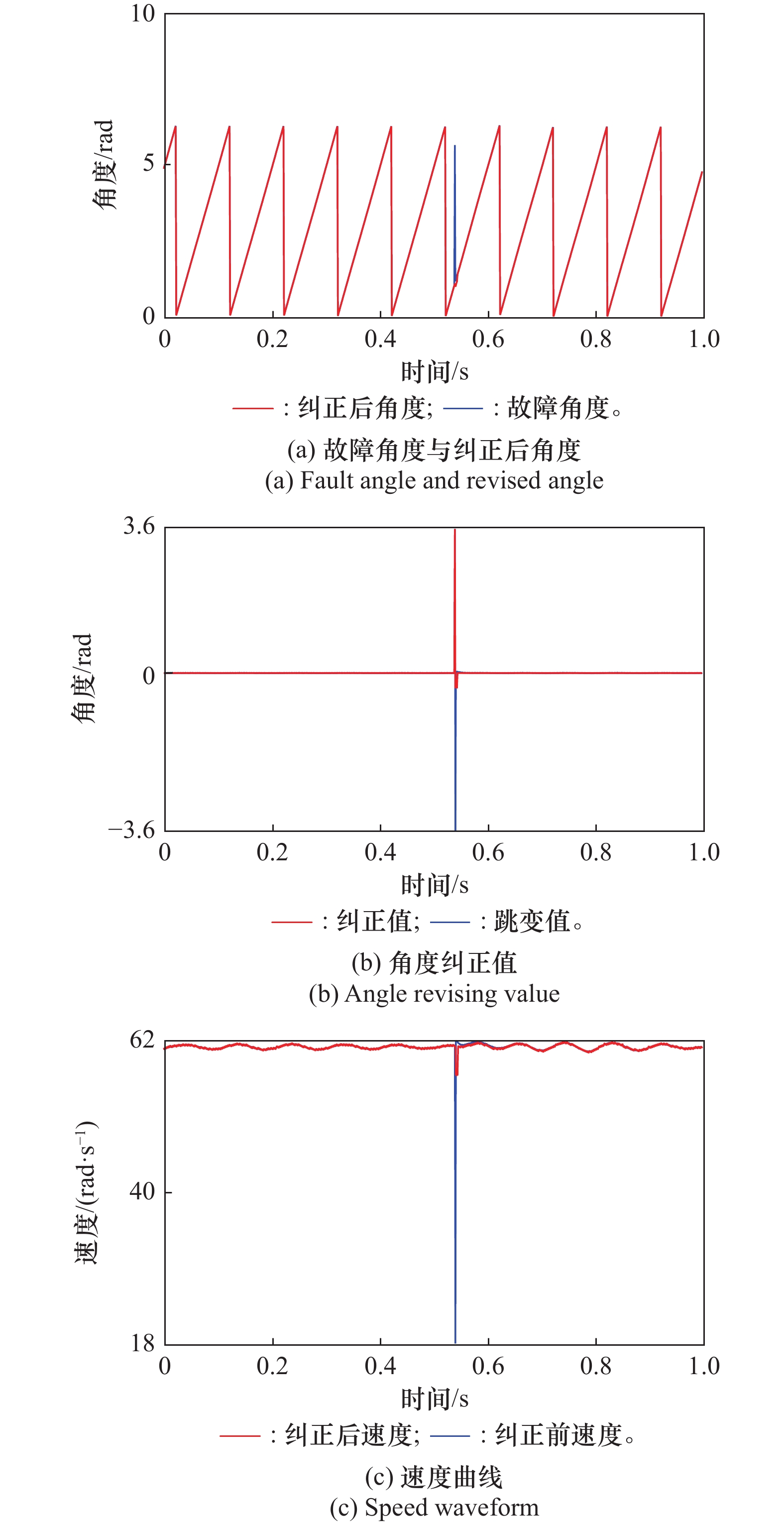

Fig.22
Bit fault correction based on speed estimation"


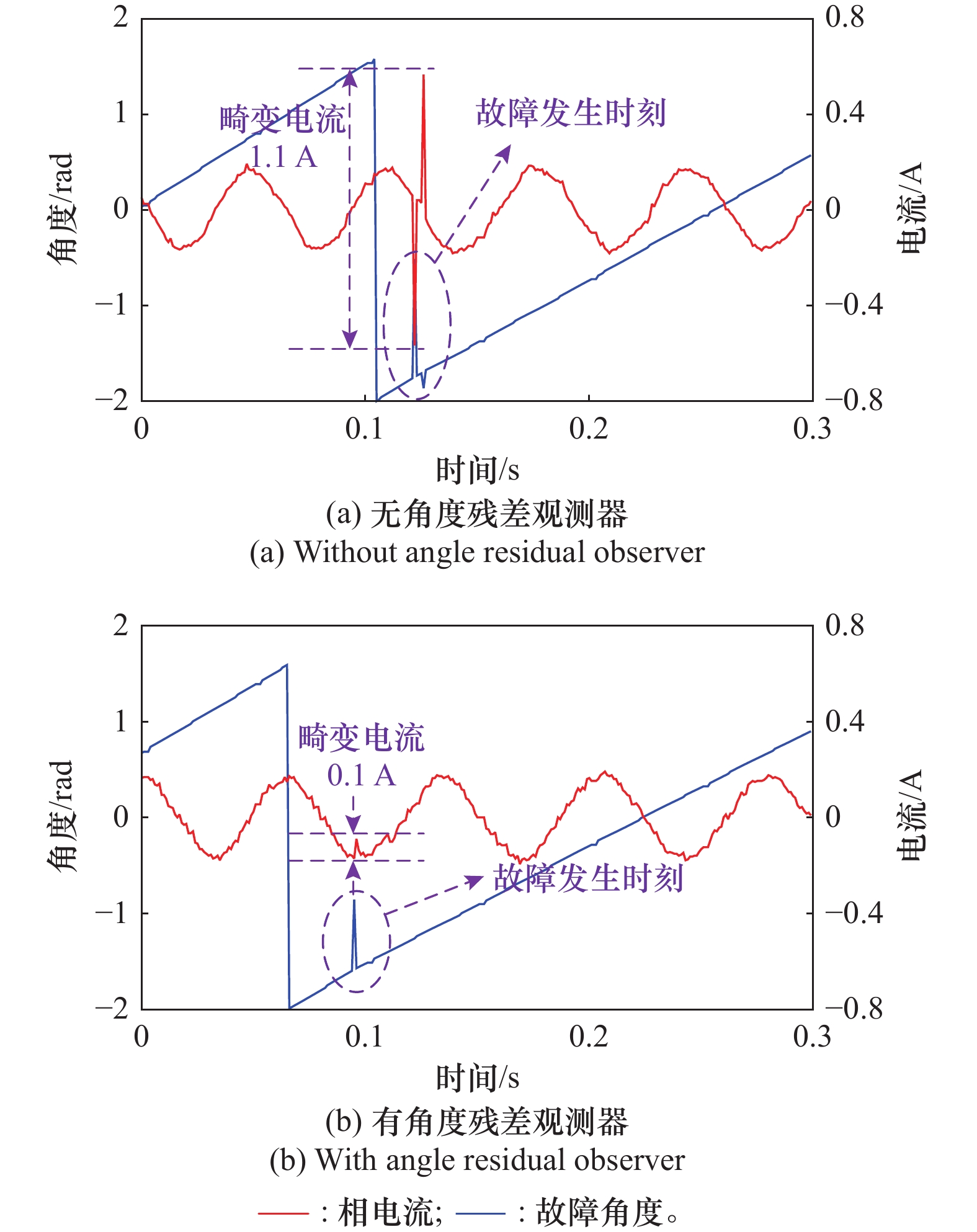
Fig.23
Impact of angle residual observer on distorted current"
| 8 |
WANG X, TAN C. Output feedback active fault tolerant control for a 3-DOF laboratory helicopter with sensor fault[J]. IEEE Trans. on Automation Science and Engineering, 2024, 21 (3): 2689- 2700.
doi: 10.1109/TASE.2023.3267132 |
| 9 | LI J, WANG Y, ZI Y Y, et al. A local weighted multi-instance multilabel network for fault diagnosis of rolling bearings using encoder signal[J]. IEEE Trans. on Instrumentation and Measurement, 2020, 69 (10): 8580- 8589. |
| 10 | YANG X M, GUO Y, WANG H W. Encoder signal analysis and its application in gear fault detection[J]. IEEE Trans. on Instrumentation and Measurement, 2024, 73, 7263. |
| 11 |
KURUPPU S, ABEYRATNE S, HETTIARACHCHI S. Modeling and detection of dynamic position sensor offset error in PMSM drivers[J]. IEEE Access, 2023, 11, 36741.
doi: 10.1109/ACCESS.2023.3265326 |
| 12 |
GAO Z, REVIRIEGO P, PAN W, et al. Fault tolerant parallel filters based on error correction codes[J]. IEEE Trans. on Very Large Scale Integration Systems, 2015, 23 (2): 384- 387.
doi: 10.1109/TVLSI.2014.2308322 |
| 13 | 陈莲, 王程, 陈兴林. 空间光通信编码器信号的故障诊断与容错设计[J]. 通信与信息处理, 2010, 29 (11): 45- 49. |
| CHEN L, WANG C, CHEN X L. Space optical communication encoder signal design of fault diagnosis and fault tolerant[J]. Communication and Information Processing, 2010, 29 (11): 45- 49. | |
| 14 | 侯锦, 王鹏. 一种适用于多级旋变的高精度编码器跳码监测评估方法[J]. 电子设计工程, 2021, 29 (7): 185- 189. |
| HOU J, WANG P. A method for code hopping monitoring and evaluating based on high-precision encoder with multi-pole resolver[J]. Electronic Design Engineering, 2021, 29 (7): 185- 189. | |
| 15 | XU P, CHAN A K. Support vector machines for multi-class signal classification with unbalanced samples[C]// Proc. of the International Joint Conference on Neural Networks, 2003: 20−24. |
| 16 | BOUROGAOUI M, BERRIRI H, BEN H, et al. Encoder disturbance fault detection in PMSM drives[J]. Journal of Electrical Systems, 2014, 10 (2): 194- 208. |
| 17 | ZHAO M, LIN J. Health assessment of rotating machinery using a rotary encoder[J]. IEEE Trans. on Industrial Electronics, 2017, 65 (3): 2548- 2556. |
| 18 |
FENG Z X, HU H, YANG S Y. Cross-sensor correlative feature learning and fusion for intelligent fault diagnosis[J]. IEEE Trans. on Industrial Informatics, 2024, 20 (3): 3664- 3674.
doi: 10.1109/TII.2023.3313655 |
| 1 | WANG Y Q, QI X D. Survey on foreign space optical scanning mechanism[J]. OME Information, 2010, 27 (12): 15- 20. |
| 2 | 肖作江. 24位绝对式光电轴角编码器的研究[D]. 长春: 长春理工大学, 2004. |
| XIAO Z J. The study of 24-bits absolute photoelectric rotary encoders[D]. Changchun: Changchun University of Science and Technology, 2004. | |
| 3 | WATANABE T, FUJIMOTO H, KAN N, et al. Automatic high-precision calibration system for angle encoder[J]. Procceedings of SPIE-The International Society for Optical, 2001, 5190, 400. |
| 4 | 邓方, 陈杰, 陈文颉, 等. 一种高精度的光电编码器检测方法及其装置[J]. 北京理工大学学报, 2007, 27 (11): 977- 980. |
| DENG F, CHEN J, CHEN W J, et al. A high precision test method and apparatus for photoelectric encoder[J]. Transactions of Beijing Institute of Technology, 2007, 27 (11): 977- 980. | |
| 5 | 赵长海, 万秋华, 孙莹. 光电轴角编码器的误码检测系统[J]. 电子测量与仪器学报, 2012, 26 (5): 463- 468. |
| ZHAO C H, WAN Q H, SUN Y. Code error detection system for photoelectric shaft encoder[J]. Journal of Electronic Measurement and Instrument, 2012, 26 (5): 463- 468. | |
| 6 | 杨金利. 绝对式光电轴角编码器测角误差自动检测技术研究[D]. 北京: 中国科学院大学, 2021. |
| YANG J L. Research on the automatic detection technology of the angle measuring error of the absolute photoelectric shaft encoder[D]. Beijing: University of Chinese Academy of Sciences, 2021. | |
| 7 |
NOVAK Z. Confidence weighted learning entropy for fault-tolerant control of a PMSM with a high-resolution hall encoder[J]. IEEE Trans. on Industrial Electronics, 2024, 71 (5): 5176- 5186.
doi: 10.1109/TIE.2023.3283690 |
| 19 | FAN J, GUO Y, NA J, et al. Gear tooth fault detection in servo motor transmission chain using the built-in encoder of servo motors[J]. IEEE Trans. on Instrumentation and Measurement, 2024, 73, 3521509. |
| 20 | DONATO G, SCELBA G, PULVIRENTI M, et al. Low-cost, high-resolution, fault-robust position and speed estimation for PMSM drives operating in safety-critical systems[J]. IEEE Trans. on Power Electronics, 2009, 34 (1): 550- 564. |
| 21 |
TRAN C, PALACKY P, KUCHAR M, et al. Current and speed sensor fault diagnosis method applied to industion motor drive[J]. IEEE Access, 2021, 9, 38660- 38672.
doi: 10.1109/ACCESS.2021.3064016 |
| 22 |
SUN H B, ZHANG X Y, LIU X B, et al. Adaptive robust sensorless control for PMSM based on improved back EMF observer and externed state observer[J]. IEEE Trans. on Industrial Electronics, 2024, 71 (12): 16635- 16643.
doi: 10.1109/TIE.2024.3398688 |
| 23 | XU G D, XIAO F, LIAN C Q. A position sensorless control strategy for PMSM drives with single-phase current sensor[J]. IEEE Trans. on Industrial Electronics, 2024, 10 (3): 4678- 4688. |
| 24 |
YAN H, WANG W J, XU Y X, et al. Position sensorless control for PMSM drives with signle current sensor[J]. IEEE Trans. on Industrial Electronics, 2023, 70 (1): 178- 188.
doi: 10.1109/TIE.2022.3148748 |
| 25 |
GE Y, SUN W Z, YANG Y, et al. A polar-coordinate-multisignal-flux-observer-based PMSM non-PLL sensorless control[J]. IEEE Trans. on Power Electronics, 2023, 38 (9): 10579- 10583.
doi: 10.1109/TPEL.2023.3289095 |
| 26 |
ZHANG R Y, FENG Y L, SHI P C, et al. Tire-road friction coefficient estimation for distributed drive electric vehicles using PMSM sensorless control[J]. IEEE Trans. on Vehicular Technology, 2023, 72 (7): 8672- 8685.
doi: 10.1109/TVT.2023.3248866 |
| 27 | 张建辉, 陈震林, 张帆. 绝对式光电编码器的编码理论研究进展[J]. 振动, 测试与诊断, 2021, 41 (1): 1- 12. |
| ZHANG J H, CHEN Z L, ZHANG F. Advances in coding theory of absolute optical encoders[J]. Journal of Vibration, Measurement & Diagnosis, 2021, 41 (1): 1- 12. | |
| 28 | ZHANG F, ZHU H J. Signal-track gray codes with non-k-spaced heads[C]//Proc. of the IEEE International Symposium on Information Theory, 2013: 311−315. |
| 29 |
ZHANG F, ZHU H J, BIAN K et al. Absolute position coding method for angular sensor-single-track gray codes[J]. Sensors, 2018, 18, 2728- 2745.
doi: 10.3390/s18082728 |
| [1] | ZHAO Yu-xin, CHANG Shuai, WAN Cheng-cheng. Software reliability growth model considering fault detection effort and fault correction effort [J]. Systems Engineering and Electronics, 2015, 37(4): 969-973. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||