Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (1): 287-295.doi: 10.12305/j.issn.1001-506X.2025.01.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Filter algorithm design for autonomous navigation in deep space detection considering the influence of multiplicative noise
Shan LU1,2, Shiyuan ZHANG1,*, Yueyang HOU1, Xiaotong ZHANG1, Qing LI1
- 1. Shanghai Aerospace Control Technology Institute, Shanghai 201109, China
2. Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai 201109, China
-
Received:2024-01-29Online:2025-01-21Published:2025-01-25 -
Contact:Shiyuan ZHANG
CLC Number:
Cite this article
Shan LU, Shiyuan ZHANG, Yueyang HOU, Xiaotong ZHANG, Qing LI. Filter algorithm design for autonomous navigation in deep space detection considering the influence of multiplicative noise[J]. Systems Engineering and Electronics, 2025, 47(1): 287-295.
share this article

Fig.1
Schematic diagram of Halo orbit near L1 point of the Earth and Moon"

Table 1
Spacecraft parameter setting"
| 参数名称 | 参数值 |
| 初始位置/km | |
| 初始速度/(km·s-1) |

Fig.2
x-axis component of theoretical observation data without noise"


Fig.3
Measurement error introduced by additive noise"
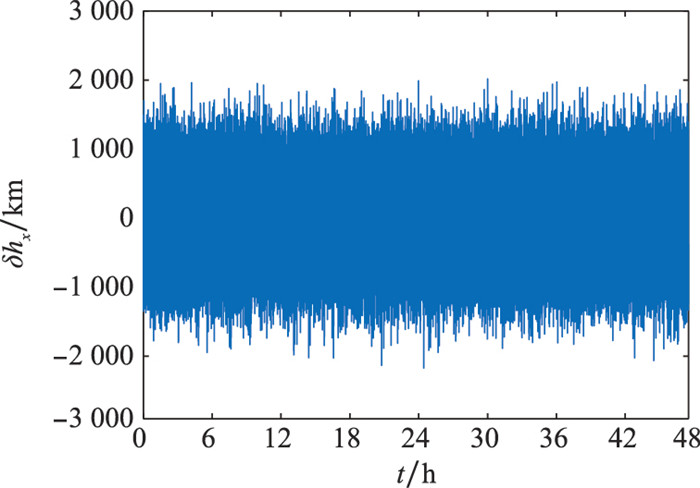

Fig.4
Measurement error introduced by multiplicative noise"
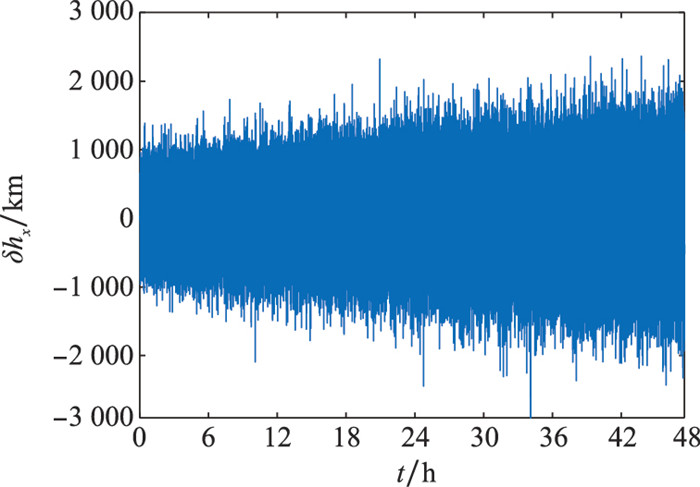

Fig.5
Position estimation RMSE of x axis"


Fig.6
Position estimation RMSE of y axis"


Fig.7
Position estimation RMSE of z axis"


Fig.8
Velocity estimation RMSE of x axis"
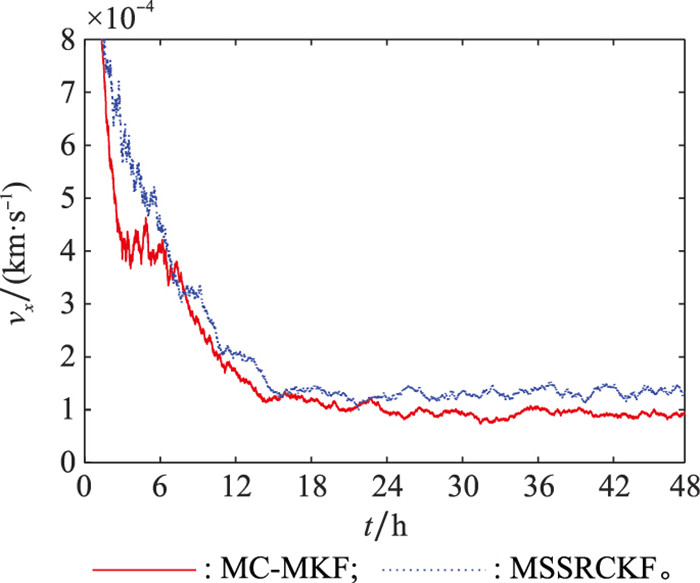

Fig.9
Velocity estimation RMSE of y axis"


Fig.10
Velocity estimation RMSE of z axis"

Table 2
Accuracy comparison result 1 of filtering algorithms"
| 参数 | MC-MKF | MSSRCKF |
| 位置/km | 7.162 | 8.468 |
| 速度/(m·s-1) | 0.154 | 0.219 |
Table 3
Accuracy comparison result 2 of filtering algorithms"
| 参数 | MC-MKF | MSSRCKF |
| 位置/km | 6.357 | 7.036 |
| 速度/(m·s-1) | 0.142 | 0.180 |
Table 4
Accuracy comparison result 3 of filtering algorithms"
| 参数 | MC-MKF | MSSRCKF |
| 位置/km | 7.216 | 8.635 |
| 速度/(m·s-1) | 0.156 | 0.224 |
Table 5
Comparison of calculation time for filtering algorithms ms"
| 计算时间 | MC-MKF | MSSRCKF |
| tmean | 0.713 | 0.703 |
| 1 |
WANG R Y , LIANG H , ZHAO H , et al. Deep space multi-file delivery protocol based on LT codes[J]. Journal of Systems Engineering and Electronics, 2016, 27 (3): 524- 530.
doi: 10.1109/JSEE.2016.00055 |
| 2 |
TURAN E , SPERETTA S , GILL E . Autonomous navigation for deep space small satellites: scientific and technological advances[J]. Acta Astronautica, 2022, 193, 56- 74.
doi: 10.1016/j.actaastro.2021.12.030 |
| 3 |
LIU J , MA J , TIAN J W . Pulsar/CNS integrated navigation based on federated UKF[J]. Journal of Systems Engineering and Electronics, 2010, 21 (4): 675- 681.
doi: 10.3969/j.issn.1004-4132.2010.04.022 |
| 4 | ZOCCARATO P , LARESE S , NALETTO G . Deep space navigation by optical pulsars[J]. Journal of Guidance, Control, and Dynamics, 2023, 46 (8): 1501- 1512. |
| 5 |
WANG Y D , ZHENG W , ZHANG S N , et al. Review of X-ray pulsar spacecraft autonomous navigation[J]. Chinese Journal of Aeronautics, 2023, 36 (10): 44- 63.
doi: 10.1016/j.cja.2023.03.002 |
| 6 |
MCLEMORE B , PSIAKI M L . Navigation using Doppler shift from LEO constellations and INS data[J]. IEEE Trans.on Aero- space and Electronic Systems, 2022, 58 (5): 4295- 4314.
doi: 10.1109/TAES.2022.3162772 |
| 7 |
ADAMS D W , PECK C , MAJJI M . Doppler light detection and ranging-aided inertial navigation and trajectory recovery[J]. Journal of Guidance, Control, and Dynamics, 2023, 46 (9): 1689- 1707.
doi: 10.2514/1.G007318 |
| 8 |
LIU J Z , XIANG Q , NING X L , et al. GGA-EMD-based inversion method of spectrum reflectance template for celestial Doppler difference navigation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2024, 60 (1): 658- 674.
doi: 10.1109/TAES.2023.3327226 |
| 9 | 刘付成, 朱庆华, 孙建党, 等. 基于图像边缘信息的火星探测器自主光学导航技术[J]. 中国科学: 技术科学, 2020, 50 (9): 1160- 1174. |
| LIU F C , ZHU Q H , SUN J D , et al. Autonomous optical edge technology for Mars probe based on image edge information[J]. SCIENTIA SINICA Technologica, 2020, 50 (9): 1160- 1174. | |
| 10 | 朱庆华, 王卫华, 刘付成, 等. "天问一号"火星探测环绕器导航制导与控制技术[J]. 深空探测学报(中英文), 2023, 10 (1): 11- 18. |
| ZHU Q H , WANG W H , LIU F C , et al. Navigation, gui-dance and control technology of Mars exploration orbiter Tianwen-1[J]. Journal of Deep Space Exploration, 2023, 10 (1): 11- 18. | |
| 11 | 孙建党, 刘宇, 谭天乐. 基于EM-EKF的深空光学自主导航系统光轴偏差补偿算法[J]. 上海航天(中英文), 2020, 37 (4): 25- 31. |
| SUN J D , LIU Y , TAN T L . An optical axis deviation compensation algorithm based on EM-EKF for deep space optical autonomous navigation system[J]. Aerospace Shanghai (Chinese & English), 2020, 37 (4): 25- 31. | |
| 12 |
LI Y Y , ZHONG M Y . Fault detection filter design for linear discrete time-varying systems with multiplicative noise[J]. Journal of Systems Engineering and Electronics, 2011, 22 (6): 982- 990.
doi: 10.3969/j.issn.1004-4132.2011.06.015 |
| 13 |
WANG S Y , WANG Z D , DONG H L , et al. Dynamic event-triggered quadratic nonfragile filtering for non-Gaussian systems: tackling multiplicative noises and missing measurements[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11 (5): 1127- 1138.
doi: 10.1109/JAS.2024.124338 |
| 14 |
KALMAN R E . A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82 (1): 35- 45.
doi: 10.1115/1.3662552 |
| 15 |
ZHANG L F , WANG S P , SELEZNEVA M S , et al. A new adaptive Kalman filter for navigation systems of carrier-based aircraft[J]. Chinese Journal of Aeronautics, 2022, 35 (1): 416- 425.
doi: 10.1016/j.cja.2021.04.014 |
| 16 |
FRASER C T , ULRICH S . Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178, 700- 721.
doi: 10.1016/j.actaastro.2020.10.016 |
| 17 | GUO Y H , VOUCH O , ZOCCA S , et al. Enhanced EKF-based time calibration for GNSS/UWB tight integration[J]. IEEE Sensors Journal, 2022, 23 (1): 552- 566. |
| 18 | MARCOS R F , GIORGIO M M , YUSEF R C Z , et al. GNSS/MEMS-INS integration for drone navigation using EKF on lie groups[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59 (6): 7395- 7408. |
| 19 | ITO K , XIONG K . Gausian filters for nonlinear filtering pro-blems[J]. IEEE Trans.on Automatic Control, 2000, 45 (5): 910- 927. |
| 20 | JIA B , XIN M , CHENG Y . High-degree cubature Kalman filter[J]. Automatica, 2013, 49 (2): 510- 518. |
| 21 | CUI B B , WEI X H , CHEN X Y , et al. Improved high-degree cubature Kalman filter based on resampling-free sigma-point update framework and its application for inertial navigation system-based integrated navigation[J]. Aerospace Science and Technology, 2021, 117, 106905. |
| 22 | WANG S Y , FENG Y L , DUAN S K , et al. Mixed-degree spherical simplex-radial cubature Kalman filter[J]. Mathematical Problems in Engineering, 2017, 2017, 6969453. |
| 23 | LIU J K , WANG P F , ZHA F S , et al. A strong tracking mixed-degree cubature Kalman filter method and its application in a quadruped robot[J]. Sensors, 2020, 20 (8): 2251. |
| 24 | ARASARATNAM I , HAYKIN S . Cubature Kalman filters[J]. IEEE Trans.on Automatic Control, 2009, 54 (6): 1254- 1269. |
| 25 | SHI J , QI G Q , LI Y Y , et al. Stochastic convergence analysis of cubature Kalman filter with intermittent observations[J]. Journal of Systems Engineering and Electronics, 2018, 29 (4): 823- 833. |
| 26 | GAO B B , HU G G , ZHANG L , et al. Cubature Kalman filter with closed-loop covariance feedback control for integrated INS/GNSS navigation[J]. Chinese Journal of Aeronautics, 2023, 36 (5): 363- 376. |
| 27 | 褚东升, 郭丽娜, 高守婉. 基于约当分解的带乘性噪声广义系统状态最优滤波算法[J]. 中国海洋大学学报(自然科学版), 2010, 40 (4): 115- 118. |
| CHU D S , GUO L N , GAO S W . Optimal filtering for stochastic singular systems with multiplicative noise based on Jordan decomposition[J]. Periodical of Ocean University of China, 2010, 40 (4): 115- 118. | |
| 28 | 王炯琦, 矫媛媛, 周海银, 等. 适合处理乘性噪声估计卫星姿态的非线性迭代滤波算法[J]. 电子学报, 2011, 39 (6): 1417- 1422. |
| WANG J Q , JIAO Y Y , ZHOU H Y . An iterative filter for nonlinear satellite attitude determination system with multiplicative stochastic matrix[J]. Acta Electronica Sinica, 2011, 39 (6): 1417- 1422. | |
| 29 | LU X , WANG L L , WANG H X , et al. Kalman filtering for delayed singular systems with multiplicative noise[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3 (1): 51- 58. |
| 30 | LIU J , WANG P F , LI M T , et al. A multiplicative noises and additive correlated noises cubature Kalman filter and its application in quadruped robot[J]. IEEE Access, 2020, 8, 162290- 162301. |
| 31 | GE Q B , MA Z C , LI J L . Adaptive cubature Kalman filter with the estimation of correlation between multiplicative noise and additive measurement noise[J]. Chinese Journal of Aeronautics, 2022, 35 (5): 40- 52. |
| 32 | 荆武兴, 高长生. 月球探测器精确相对动力学模型及其应用[J]. 中国科学: 物理学天文学力学, 2010, 40 (4): 462- 470. |
| JING W X , GAO C S . Precise relative dynamics model of a lunar probe and its application[J]. SCIENTIA SINICA Physica, Mechanica & Astronomica, 2010, 40 (4): 462- 470. | |
| 33 | KIM K H , JEE G J , PARK C G , et al. The stability analysis of the adaptive fading extended Kalman filter using the innovation covariance[J]. International Journal of Control, Automation and Systems, 2009, 7, 49- 56. |
| 34 | 卢山, 张世源. 非合作航天器相对运动估计的混合滤波器设计方法[J]. 宇航学报, 2023, 44 (5): 764- 773. |
| LU S , ZHANG S Y . Hybrid filter design for relative motion estimation of non-cooperative spacecraft[J]. Journal of Astronautics, 2023, 44 (5): 764- 773. | |
| 35 |
钱霙婧, 荆武兴, 刘玥, 等. 地月平动点拟周期轨道设计方法[J]. 系统工程与电子技术, 2014, 36 (8): 1586- 1594.
doi: 10.3969/j.issn.1001-506X.2014.08.22 |
|
QIAN Y J , JING W X , LIU Y , et al. Design of quasi-periodic orbit about the translunar libration point[J]. Systems Engineering and Electronics, 2014, 36 (8): 1586- 1594.
doi: 10.3969/j.issn.1001-506X.2014.08.22 |
|
| 36 | KAYAMA Y , HOWELL K C , BANDO M , et al. Low-thrust trajectory design with successive convex optimization for libration point orbits[J]. Journal of Guidance, Control, and Dynamics, 2022, 45 (4): 623- 637. |
| [1] | Yingjie ZHANG, Hongmeng CHEN, Wenquan GAO, Jian LAN, Chunmao YE, Yan CHEN. High accuracy cooperative tracking and power allocation method in networked radar system [J]. Systems Engineering and Electronics, 2024, 46(11): 3726-3735. |
| [2] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [3] | SHENG Hu, WANG Jin-gen, CHEN Zhi-ping, CAO Yan, ZHAO Wen-bo. Application research of altitude compensation based BLUE algorithm in TACAN [J]. Systems Engineering and Electronics, 2016, 38(8): 1752-1757. |
| [4] | CHENG Shui-ying, YU Li. Algorithm realization and its application evaluation of the iterated unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2546-2553. |
| [5] | ZHANG Gangbing, LIU Yu, XU Jiajia. Unscented Kalman filter with forwardbackward prediction for single observer passive location and tracking [J]. Journal of Systems Engineering and Electronics, 2010, 32(7): 1415-1418. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||