Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (10): 3492-3505.doi: 10.12305/j.issn.1001-506X.2024.10.26
• Guidance, Navigation and Control • Previous Articles
Two-stage cooperative rendezvous method for winged aircraft in initial guidance phase
Xingguang XU1,2,*, Xingcai HE2, Zhang REN1
- 1. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
2. Beijing Institute of Mechanical and Electrical Engineering, Beijing 100074, China
-
Received:2022-03-21Online:2024-09-25Published:2024-10-22 -
Contact:Xingguang XU
CLC Number:
Cite this article
Xingguang XU, Xingcai HE, Zhang REN. Two-stage cooperative rendezvous method for winged aircraft in initial guidance phase[J]. Systems Engineering and Electronics, 2024, 46(10): 3492-3505.
share this article

Fig.1
Schematic diagram of cooperative rendezvous of winged aircraft"


Fig.2
Relative motion relationship during rendezvous towards (x0*, z0*) for aircraft i"


Fig.3
Basic principle of rendezvous nodes setting of Phase Ⅱ"


Fig.4
Principle diagram of trajectory control and speed control allocation based on fuzzy logic"


Fig.5
Membership functions of Vi(t), K3 and K4"

Table 1
Fuzzy rules table of K3"
| Vi(t) | K3 | Vi(t) | K3 | |
| NB | PB | PS | PS | |
| NS | PS | PB | PB | |
| Z | Z | - | - |
Table 2
Fuzzy rules table of K4"
| Vi(t) | K4 | Vi(t) | K4 | |
| NB | Z | PS | PS | |
| NS | PS | PB | Z | |
| Z | PB | - | - |
Table 3
Initial deployment nodes status of winged aircraft"
| 飞行器 | X向位置/km | Z向位置/km | 速度/(km/s) | 航迹偏角/(°) |
| 飞行器0 | 120 | 320 | 2 | 0 |
| 飞行器1 | 140 | 380 | 2 | -20 |
| 飞行器2 | 160 | 410 | 2 | -40 |
| 飞行器3 | 200 | 440 | 2 | -70 |
| 飞行器4 | 130 | 260 | 2 | 20 |
| 飞行器5 | 150 | 200 | 2 | 40 |
| 飞行器6 | 200 | 160 | 2 | 70 |

Fig.6
Diagram of communication topology"


Fig.7
Simulation curve of time cooperative rendezvous for winged aircraft"


Fig.8
Cooperative rendezvous track of Phase Ⅰ"

Table 4
Endpoint status for cooperative rendezvous of Phase Ⅰ"
| 飞行器 | X向位置/km | Z向位置/km | 速度/(km/s) |
| 飞行器0 | 250.4 | 300.8 | 2.00 |
| 飞行器1 | 251.7 | 304.2 | 2.05 |
| 飞行器2 | 250.0 | 306.7 | 2.13 |
| 飞行器3 | 247.6 | 310.0 | 2.26 |
| 飞行器4 | 250.5 | 298.1 | 2.09 |
| 飞行器5 | 249.3 | 295.8 | 2.15 |
| 飞行器6 | 247.4 | 291.1 | 2.26 |

Fig.9
Distance curve of follower aircraft relative to leader aircraft"

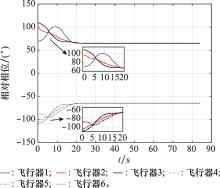
Fig.10
Phase curve of follower aircraft relative to leader aircraft"


Fig.11
Cooperative rendezvous track of Phase Ⅱ"
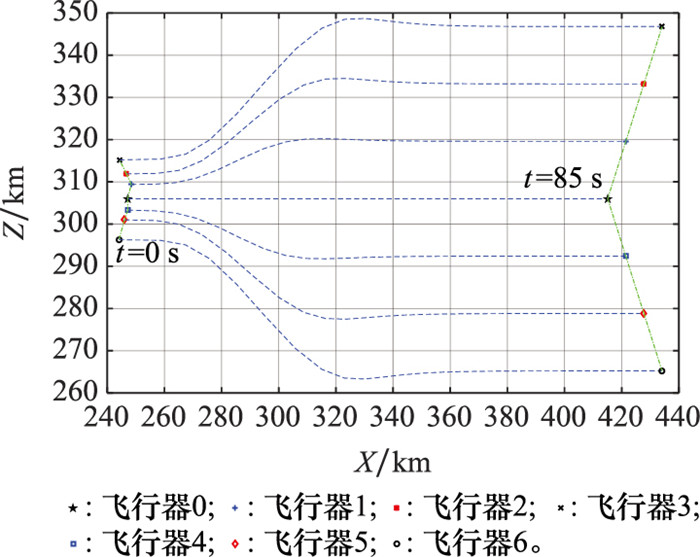

Fig.12
Cooperative rendezvous track error of follower aircraft in Phase Ⅱ cooperative rendezvous"


Fig.13
Velocity curve for cooperative rendezvous of Phase Ⅱ follower aircraft"


Fig.14
Relative distances between aircraft corresponding to each communication link during cooperative rendezvous"

| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41 (4): 20- 45. |
| WANG X K , LIU Z H , CONG Y R , et al. Mininature fixed-wing UAV swarms: review and outlook[J]. Acta Aeronautica et Astonautica Sinica, 2020, 41 (4): 20- 45. | |
| 2 |
LILIEN L T , OTHMANNE L B , ANGIN P , et al. A simulation study of AD HOC networking of UAVs with opportunistic resource utilization networks[J]. Journal of Network and Computer Applications, 2014, 38, 3- 15.
doi: 10.1016/j.jnca.2013.05.003 |
| 3 | 吴森堂. 导弹自主编队协同制导控制技术[M]. 北京: 国防工业出版社, 2015. |
| WU S T . Cooperative guidance & control of missiles autonomous formation[M]. Beijing: National Defense Industry Press, 2015. | |
| 4 | 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN H B , QIU H X . Unmanned aerial vehicles swarm auto-nomous control based on swarm intelligence[M]. Beijing: Science Press, 2018. | |
| 5 |
ZHANG Y , WANG P F , YANG L Q , et al. Novel swarm intelligence algorithm for global optimization and multi-UAVs cooperative path planning: Anas platyrhynchos optimizer[J]. Applied Sciences, 2020, 10 (14): 4821.
doi: 10.3390/app10144821 |
| 6 |
WU W N , XU J , SUN Y M . Integrate assignment of multiple heterogeneous unmanned aerial vehicles performing dynamic di-saster inspection and validation task with dubins path[J]. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 4018- 4032.
doi: 10.1109/TAES.2023.3235864 |
| 7 |
LI J Q , DENG G Q , LUO C W , et al. A hybrid path planning method in unmanned air/ground vehicle (UAV/UGV) cooperative systems[J]. IEEE Trans. on Vehicular Technology, 2016, 65 (12): 9585- 9596.
doi: 10.1109/TVT.2016.2623666 |
| 8 |
DUAN H B , ZHAO J X , DENG Y M , et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (1): 706- 720.
doi: 10.1109/TAES.2020.3029624 |
| 9 |
WU Y , LOW K H , LYU C . Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Trans. on Vehicular Technology, 2020, 69 (6): 6782- 6787.
doi: 10.1109/TVT.2020.2991983 |
| 10 |
PHARPATARA P , HERISSE B , BESTAOUI Y . 3-D trajectory planning of aerial vehicles using RRT*[J]. IEEE Trans. on Control Systems Technology, 2017, 25 (3): 1116- 1123.
doi: 10.1109/TCST.2016.2582144 |
| 11 |
GUO J G , HU G J , GUO Z Y , et al. Evaluation model, intelligent assignment, and cooperative interception in multi-missile and multi-target engagement[J]. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (4): 3104- 3115.
doi: 10.1109/TAES.2022.3144111 |
| 12 |
WANG C Y , YU H S , DONG W , et al. Three-dimensional impact angle and time control guidance law based on two-stage strategy[J]. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (6): 5361- 5372.
doi: 10.1109/TAES.2022.3169124 |
| 13 |
ZHANG L , LI D Y , JING L , et al. Appointed-tie cooperative guidance law with line-of sight angel constraint and time-to-go control[J]. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (3): 3142- 3155.
doi: 10.1109/TAES.2022.3221059 |
| 14 | WANG X F , ZHANG Y W , LIU D Z , et al. Three-dimensional cooperative guidance and control law for multiple reentry missiles with time-varying velocities[J]. Aerospace Science and Technology, 2018, 80 (9): 127- 143. |
| 15 |
SONG L , ZHANG Y A , HUANG D , et al. Cooperative simultaneous attack of multi-missiles under unreliable and noisy communication network: a consensus scheme of impact time[J]. Aerospace Science and Technology, 2015, 47, 31- 41.
doi: 10.1016/j.ast.2015.09.015 |
| 16 | ZHAO Q L, DONG X W, SONG X, et al. Time-varying formation pursuit based cooperative guidance for multiple missiles to intercept a maneuvering target[C]//Proc. of the 37th Chinese Control Conference, 2018: 4779-4784. |
| 17 | 于江龙, 董希旺, 李清东, 等. 拦截机动目标的分布式协同围捕制导方法[J]. 航空学报, 2022, 43 (9): 521- 541. |
| YU J L , DONG X W , LI Q D , et al. Distributed cooperative encirclement hunting guidance method for intercepting maneuvering target[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (9): 521- 541. | |
| 18 | ZHAO Q L, DONG X W, LIANG Z X, et al. Distributed group cooperative guidance for multiple missiles with switching directed communication topologies[C]//Proc. of the 36th Chinese Control Conference, 2017: 5741-5746. |
| 19 |
ZHAO Q L , DONG X W , LIANG Z X , et al. Distributed cooperative guidance for multiple missiles with fixed and swit-ching communication topologies[J]. Chinese Journal of Aeronautics, 2017, 30 (4): 1570- 1581.
doi: 10.1016/j.cja.2017.06.009 |
| 20 |
LYU M L , SCHUTTER B D , BALDI S . Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication[J]. IEEE Trans. on Industrial Informatics, 2023, 19 (3): 3188- 3197.
doi: 10.1109/TII.2022.3163573 |
| 21 |
YIN T T , GU Z , XIE X P . Observer-based event-triggered sliding mode control for secure formation tracking of multi-UAV systems[J]. IEEE Trans. on Network Science and Engineering, 2023, 10 (2): 887- 898.
doi: 10.1109/TNSE.2022.3223978 |
| 22 |
ZHANG B Y , SUN X X , LYU M L . Distributed adaptive fixed-time fault-tolerant control for multiple 6-DOF UAVs with full-state constraints guarantee[J]. IEEE Systems Journal, 2022, 16 (3): 4792- 4803.
doi: 10.1109/JSYST.2021.3128973 |
| 23 |
LIU B J , LI A J , GUO Y , et al. Adaptive distributed finite-time formation control for multi-UAVs under input saturation without collisions[J]. Aerospace Science and Technology, 2022, 120, 107252.
doi: 10.1016/j.ast.2021.107252 |
| 24 |
YU J L , DONG X W , LI Q D , et al. Cooperative integrated practical time-varying formation tracking and control for multiple missiles system[J]. Aerospace Science and Technology, 2019, 93, 105300.
doi: 10.1016/j.ast.2019.105300 |
| 25 | SHI Y, SONG J S, HUA Y Z, et al. Leader-follower formation control for fixed-wing UAVs using deep reinforcement learning[C]//Proc. of the 41st Chinese Control Conference, 2022: 3456-3461. |
| 26 |
REN W , BEARD R W . Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J]. IEEE Trans. on Automatic Control, 2005, 50 (5): 655- 661.
doi: 10.1109/TAC.2005.846556 |
| 27 | 钱杏芳. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2011. |
| QIAN X F . Principles of missile flight[M]. Beijing: Beijing Institute of Technology Press, 2011. | |
| 28 | 马国欣, 张友安. 导弹速度时变的攻击时间与攻击角度控制导引律[J]. 飞行力学, 2013, 31 (3): 255- 259. |
| MA G X , ZHANG Y A . Impact time and impact angle control guidance law for missiles with time-varying velocity[J]. Flight Dynamics, 2013, 31 (3): 255- 259. | |
| 29 |
ZHOU H B , YING H , ZHANG C L , et al. Effects of increasing the footprints of uncertainty on analytical structure of the classes of interval type-2 mamdani and TS fuzzy controller[J]. IEEE Trans. on Fuzzy Systems, 2019, 27 (9): 1881- 1890.
doi: 10.1109/TFUZZ.2019.2892354 |
| 30 |
JASON T P , ANDREA S , STEPHEN Y , et al. Control-oriented modeling of an air-breathing hypersonic vehicle[J]. Journal of Guidance, Control, and Dynamics, 2007, 30 (3): 856- 869.
doi: 10.2514/1.27830 |
| [1] | Shufeng GONG, Weijun LONG, De BEN, Minghai PAN. Adaptive fuzzy CFAR detection fusion algorithm for netted radar [J]. Systems Engineering and Electronics, 2022, 44(1): 100-107. |
| [2] | Yue LYU, Aiwu YANG, Zhanwu LI, Zhifei XI. Research on the construction method of air combat decision knowledge [J]. Systems Engineering and Electronics, 2021, 43(7): 1866-1874. |
| [3] | ZHAO Yuan, JIAO Jian, ZHAO Ting-di. Risk assessment method based on fuzzy logic [J]. Systems Engineering and Electronics, 2015, 37(8): 1825-1831. |
| [4] | MA Yue-yue, TANG Sheng-jing, GUO Jie, SHI Jiao. High angle of attack control system design based on ADRC and fuzzy logic [J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1711-1716. |
| [5] | GAO Feng ,TANG Sheng-jing ,GUO Jie ,SHI Jiao . Compound control allocation strategy design of dual aero/ thrust vector flight vehicle based on different flight phases [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1249-1255. |
| [6] | PENG Li, HUANG Wei. Approach for multi-objective optimal scheduling of electronic reconnaissance satellites based on stochastic simulation [J]. Journal of Systems Engineering and Electronics, 2013, 35(3): 545-551. |
| [7] | LI Liangqun, XIE Weixin, ZHANG Zhichao. New adaptive α-β tracking filter algorithm based on fuzzy logic [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 244-249. |
| [8] | SHE Ying-ying,FANG Hua-jing . Finite-time tracking control for multi-agent systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(8): 1871-1874. |
| [9] | DU Hang-yuan, HAO Yan-ling, ZHAO Yu-xin. Data association approach for SLAM based on fuzzy logic [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2468-2473. |
| [10] | CAO Hong-bing, WEI Jian-ming, LIU Hai-tao. Target classification algorithm based on particle swarm optimization in wireless sensor networks [J]. Journal of Systems Engineering and Electronics, 2010, 32(5): 1014-1018. |
| [11] | WU Ze-min, REN Shu-jie, NI Ming-fang. Track initialization based on fuzzy accumulation function [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1213-1216. |
| [12] | YU Jin-tao,LIANG Ting-wei. Application of fuzzy logic adaptive Kalman filter in NGIMU/GPS integrated navigation [J]. Journal of Systems Engineering and Electronics, 2009, 31(11): 2710-2713 . |
| [13] | YAO Xiong-liang, FENG Lin-han, ZHANG A-man. Quantitative vulnerability assessment method of aircraft guarantee systems on board [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2409-2413. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||