Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (4): 1300-1310.doi: 10.12305/j.issn.1001-506X.2025.04.26
• Guidance, Navigation and Control • Previous Articles Next Articles
Pedestrian indoor positioning method based on INS/UWB tight integration
Yueyang BEN, Yuan HUANG, Hongdian HUANG, Qian LI
- College of Intelligent Systems Science and Engineering, Harbin Engineering University, Harbin 150001, China
-
Received:2024-03-29Online:2025-04-25Published:2025-05-28 -
Contact:Qian LI
CLC Number:
Cite this article
Yueyang BEN, Yuan HUANG, Hongdian HUANG, Qian LI. Pedestrian indoor positioning method based on INS/UWB tight integration[J]. Systems Engineering and Electronics, 2025, 47(4): 1300-1310.
share this article
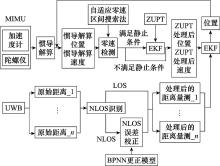
Fig.1
Framework of INS/UWB tight integration localization algorithm"
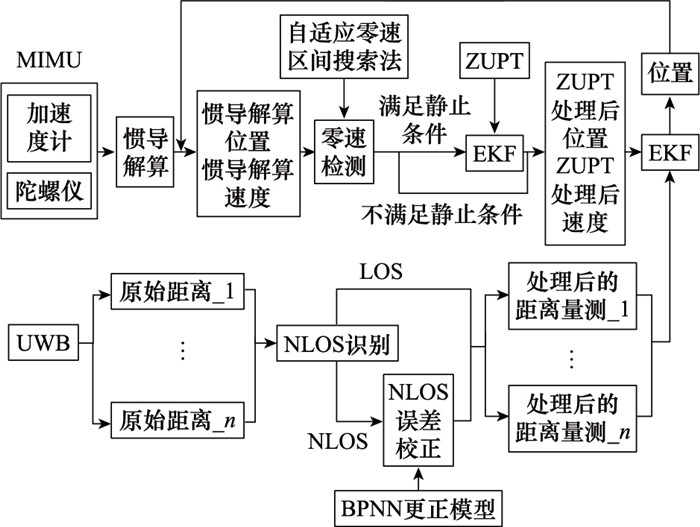
Fig.2
Comparison of trends of foot data distribution"
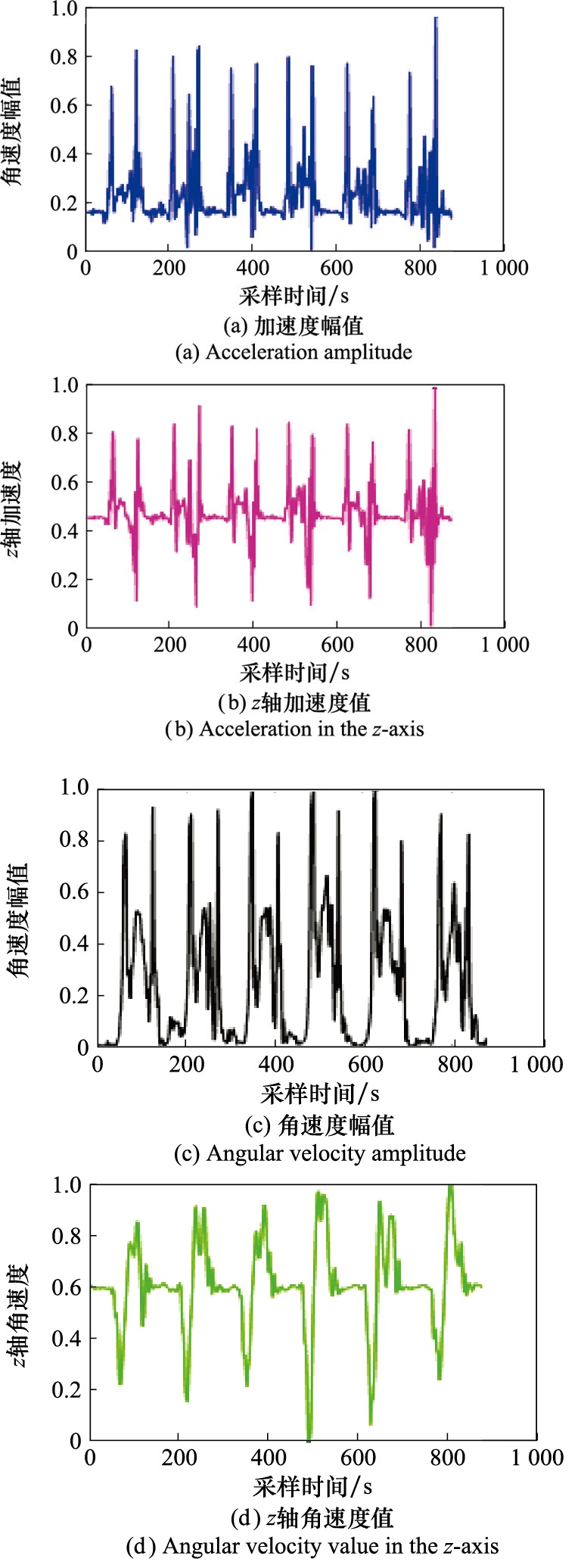
Fig.3
Determination of basic search unit"
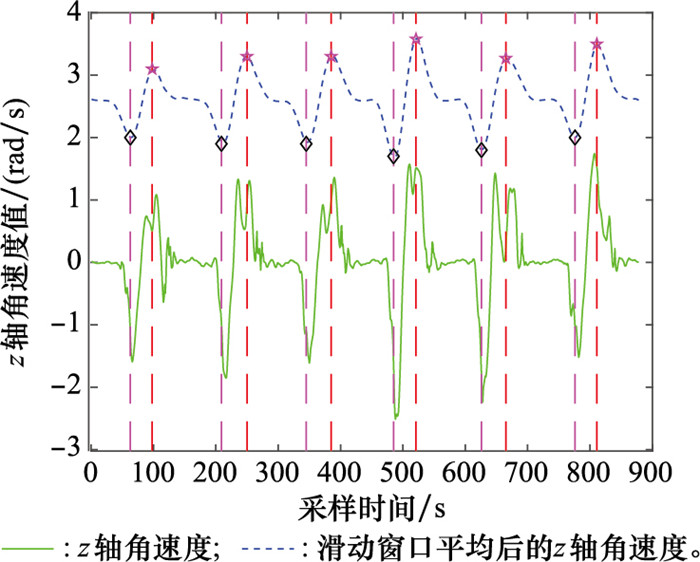
Fig.4
Determination of zero angular velocity interval point"
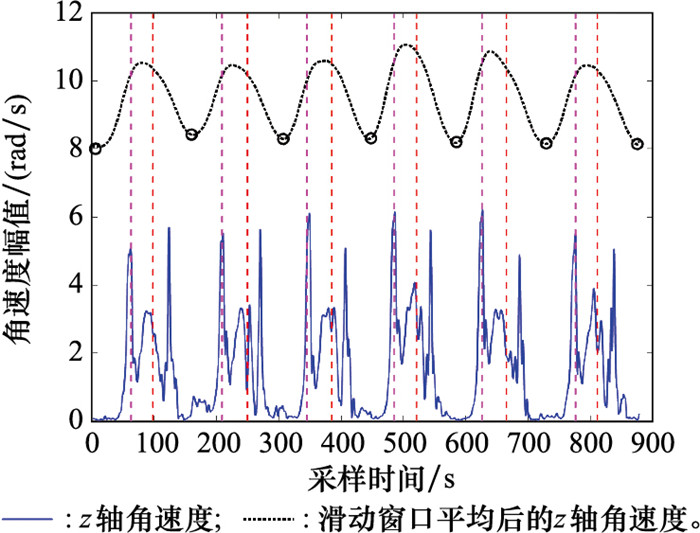
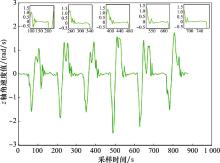
Fig.5
Search at the beginning of zero angular velocity interval"
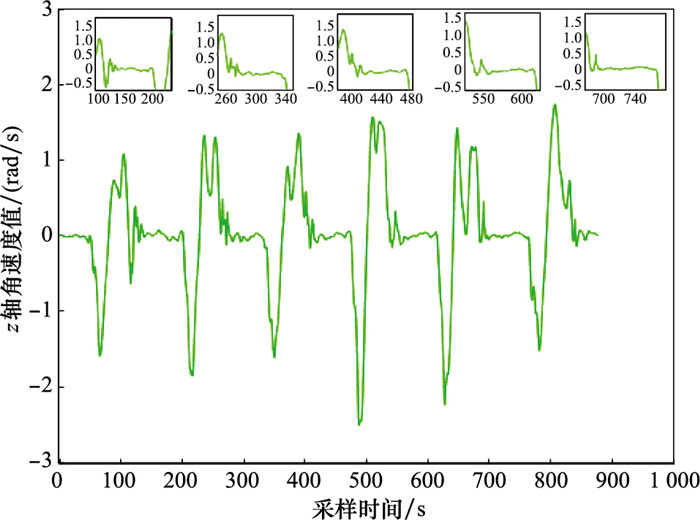
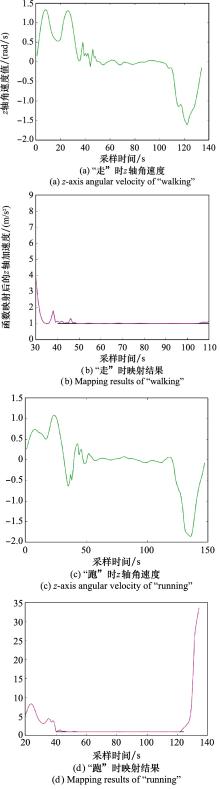
Fig.6
Distribution of z-axis angular velocity for "walking" and "running" scenes"
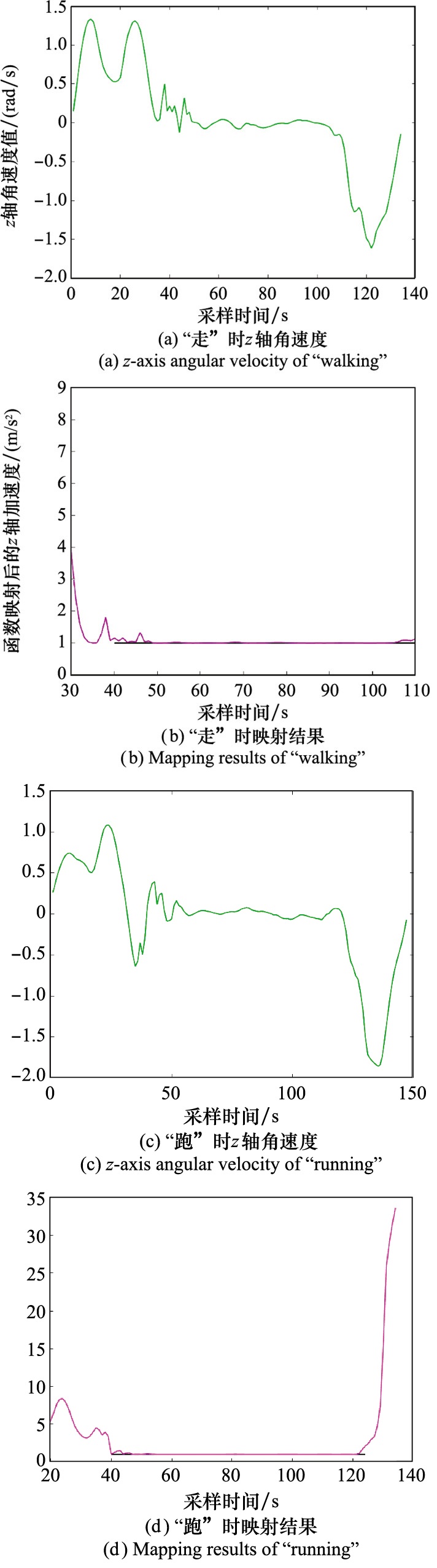
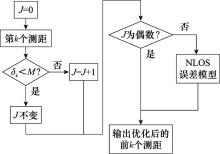
Fig.7
UWB ranging error compensation process"
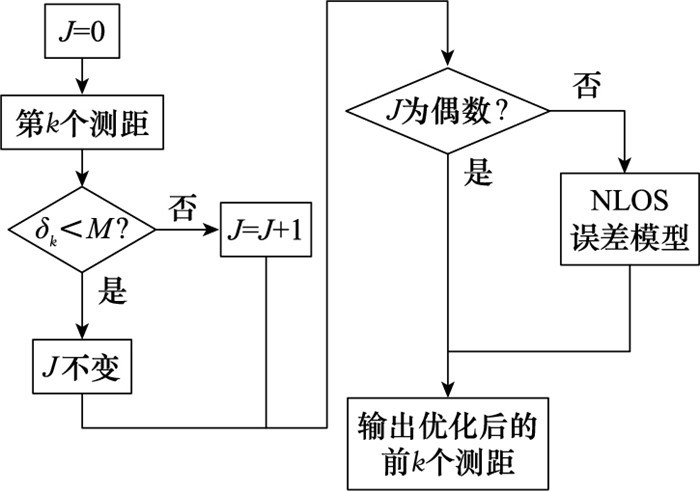

Fig.8
BPNN ranging error model"
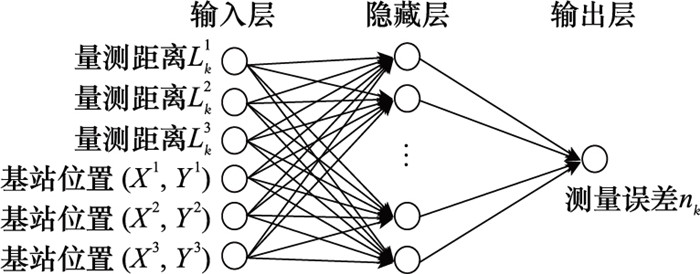

Fig.9
Experiment site"

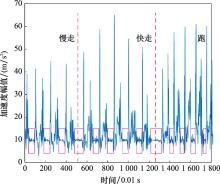
Fig.10
Adaptive zero speed interval search results(walk straight)"
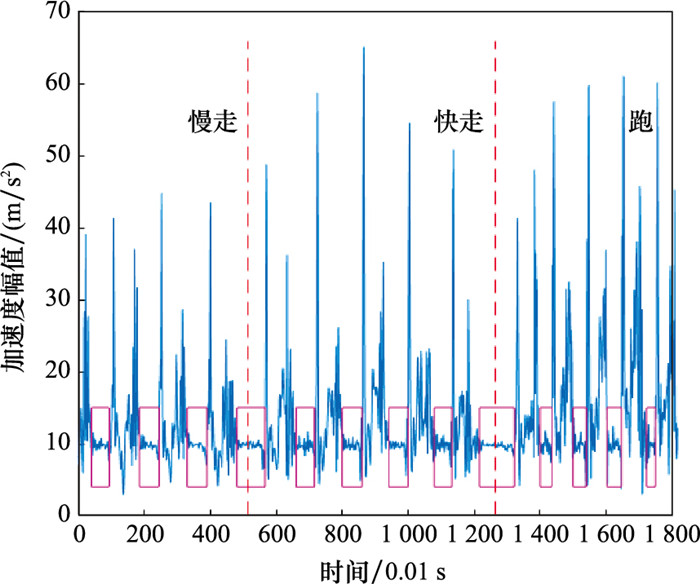

Fig.11
Indoor pedestrian trajectory(walk straight)"
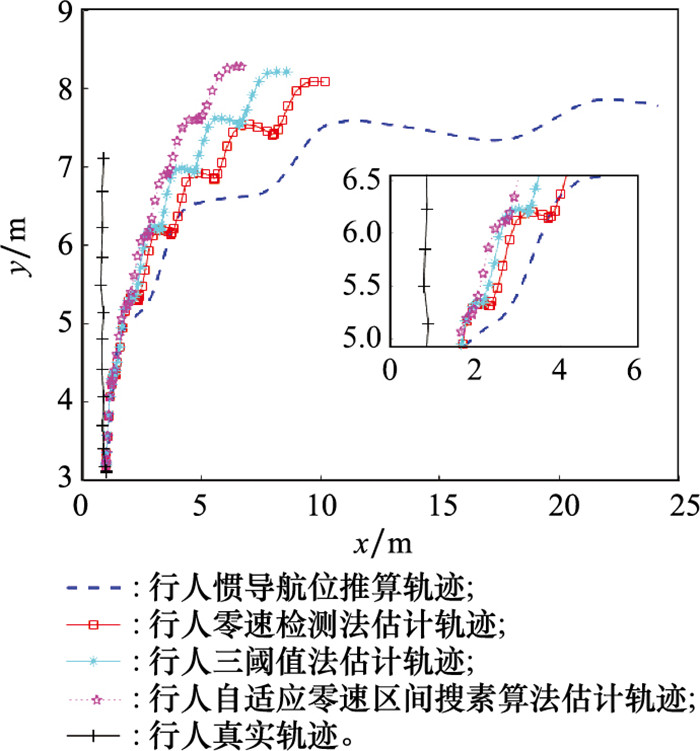
Table 1
Zero speed interval search comparison results (walk straight)"
| 检测器 | 零速数量/帧 | 终点误差/m |
| 无 | 0 | 23.970 |
| 三阈值法 | 438 | 7.863 |
| 零速检测法 | 589 | 9.642 |
| 自适应零速区间搜索算法 | 657 | 4.851 |
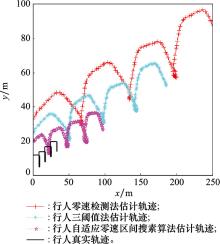
Fig.12
Indoor pedestrian trajectory(walk square)"
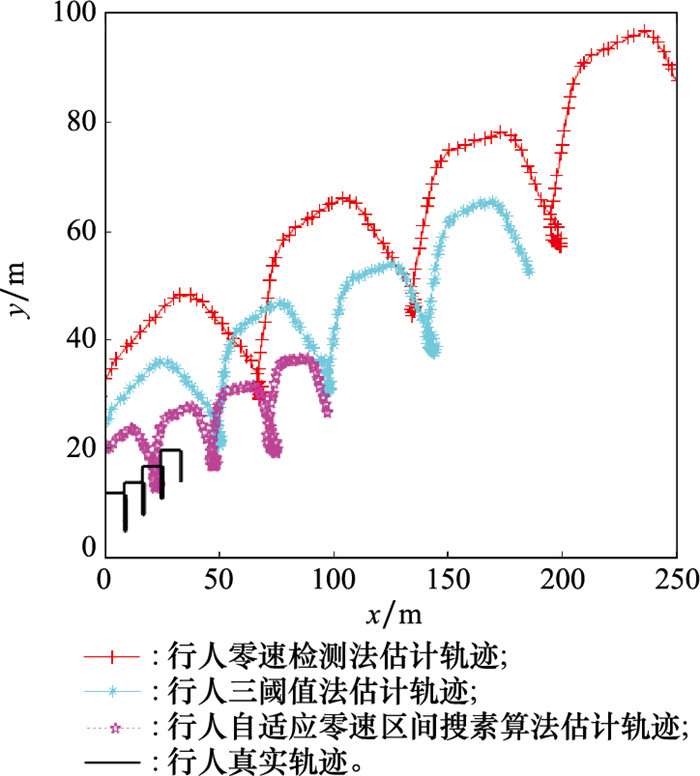
Table 2
Zero speed interval search comparison results (walk square)"
| 检测器 | 零速数量/帧 | 终点误差/m |
| 无 | 0 | 48 575 |
| 三阈值法 | 9 936 | 270.412 |
| 零速检测法 | 6 892 | 192.108 |
| 自适应零速区间搜索算法 | 14 860 | 100.606 |
Table 3
Adaptive zero speed interval search matching degree (walk straight)"
| 检测器 | 相同零速数量/帧 | 匹配度/% |
| 三阈值法 | 400 | 91.324 |
| 零速检测法 | 559 | 94.907 |
Table 4
Adaptive zero speed interval search matching degree (walk square)"
| 检测器 | 相同零速数量/帧 | 匹配度/% |
| 三阈值法 | 9 936 | 90.58 |
| 零速检测法 | 6 892 | 94.31 |
Table 5
Statistical table of data for test sample points"
| 样本 | 点位测量数据 | BPNN预测 | ||||
| 真实距离/m | 测量距离/m | 更正前绝对误差/m | 更正后测量距离/m | 更正后绝对误差/m | ||
| A1 | 4.30 | 4.53 | 0.23 | 4.29 | 0.01 | |
| A2 | 5.30 | 5.52 | 0.22 | 5.28 | 0.02 | |
| A3 | 4.89 | 5.21 | 0.32 | 4.90 | 0.01 | |
| A4 | 3.50 | 3.68 | 0.18 | 3.53 | 0.03 | |
| A5 | 2.03 | 2.39 | 0.36 | 2.01 | 0.02 | |
| A6 | 2.11 | 2.50 | 0.39 | 2.12 | 0.01 | |
| A7 | 1.92 | 2.10 | 0.18 | 1.94 | 0.02 | |
| A8 | 4.05 | 4.28 | 0.23 | 4.08 | 0.03 | |
| A9 | 3.46 | 3.70 | 0.26 | 3.47 | 0.01 | |
| A10 | 2.59 | 2.86 | 0.27 | 2.62 | 0.03 | |
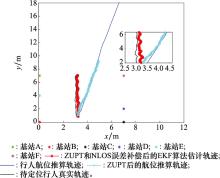
Fig.13
Pedestrian trajectory in indoor complex scenes"
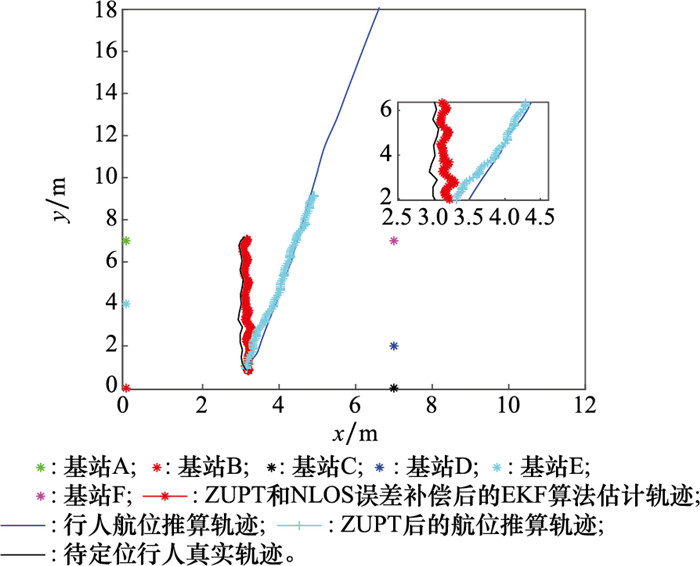
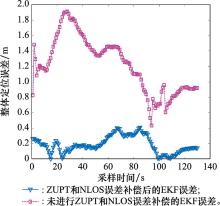
Fig.14
Pedestrian positioning error"
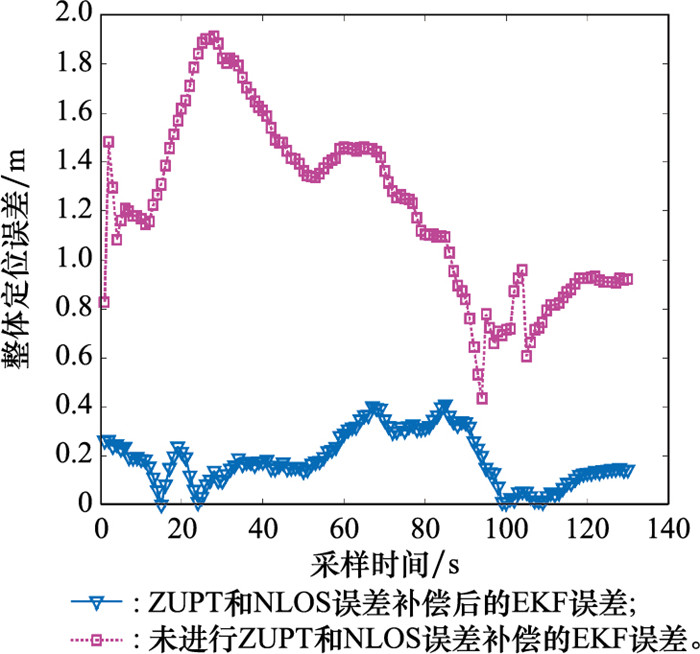
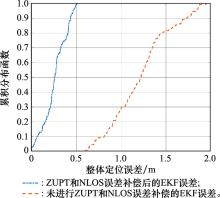
Fig.15
Cumulative distribution function diagram of pedestrian localization error"
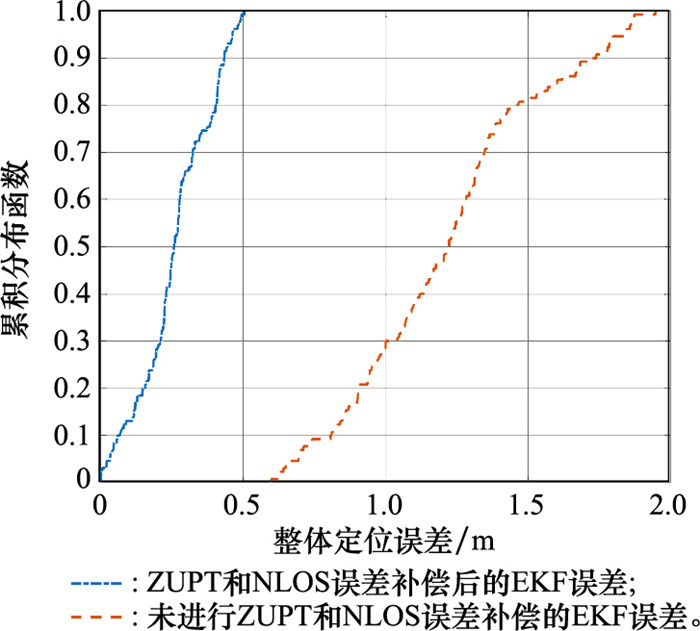
Table 6
Running time of different algorithms"
| 定位算法 | 运行时间/s |
| 行人航位推算 | 0.779 |
| 基于ZUPT的行人航位推算 | 0.978 |
| ZUPT和NLOS误差补偿后的EKF | 6.115 |
| 1 | ASHRAF I , HUR S , PARK Y . Smartphone sensor based indoor positioning: current status, opportunities, and future cha-llenges[J]. Electronics, 2024, 9 (6): 891. |
| 2 | YU Q. Indoor location methods of fire personnel based on GPS and sensor network[C]//Proc. of the 4th International Conference on Informatics Engineering & Information Science, 2022, 12161: 357-363. |
| 3 | MIAO C W , CHEN G Z , YAN C L , et al. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm[J]. Computers & Industrial Engineering, 2021, 15, 107230. |
| 4 |
HUANG J H , JUNGINGER S , LIU H , et al. Indoor positioning systems of mobile robots: a review[J]. Robotics, 2023, 12 (2): 47.
doi: 10.3390/robotics12020047 |
| 5 |
SESYUK A , IOANNOU S , RASPOPOULOS M . A survey of 3D indoor localization systems and technologies[J]. Sensors, 2022, 22 (23): 9380.
doi: 10.3390/s22239380 |
| 6 | TEYMOURI M S, BHATTACHARYA S. Landmark-based distributed topological mapping and navigation in GPS-denied urban environments using teams of low-cost robots[EB/OL]. [2024-03-01]. https://link.springer.com/article/10.1007/s10458-024-09635-y. |
| 7 |
YAN J , YANG C , FAN W Y , et al. GNSS/UWB integrated positioning with robust Helmert variance component estimation[J]. Advances in Space Research, 2024, 73 (5): 2532- 2547.
doi: 10.1016/j.asr.2023.12.020 |
| 8 | CHIANG K W , CHANG H W , LI Y H , et al. Assessment for INS/GNSS/odometer/barometer integration in loosely-coupled and tightly-coupled scheme in a GNSS-degraded environment[J]. IEEE Sensors Journal, 2019, 20 (6): 3057- 3069. |
| 9 |
ZHOU P , WANG H , GRAVINA R , et al. WIO-EKF: extended Kalman filtering-based Wi-Fi and inertial odometry fusion method for indoor localization[J]. IEEE Internet of Things Journal, 2024, 11 (13): 23592- 23603.
doi: 10.1109/JIOT.2024.3386889 |
| 10 |
JURDI R , CHEN H , ZHU Y M , et al. WhereArtThou: a WiFi-RTT-based indoor positioning system[J]. IEEE Access, 2024, 12, 41084- 41101.
doi: 10.1109/ACCESS.2024.3377237 |
| 11 |
NIU J W , WANG B W , SHU L , et al. ZIL: an energy-efficient indoor localization system using ZigBee radio to detect WiFi fingerprints[J]. IEEE Journal on Selected Areas in Communications, 2015, 33 (7): 1431- 1442.
doi: 10.1109/JSAC.2015.2430171 |
| 12 |
GUO G Y , CHEN R Z , YAN K , et al. Multi-channel and multi-RSS based BLE range estimation for indoor tracking of commercial smartphones[J]. IEEE Sensors Journal, 2023, 23 (24): 30728- 30738.
doi: 10.1109/JSEN.2023.3328711 |
| 13 | XU S H , CHEN R Z , GUO G Y , et al. Bluetooth, floor-plan, and microelectromechanical systems-assisted wide-area audio indoor localization system: apply to smartphones[J]. IEEE Trans.on Industrial Electronics, 2021, 69 (11): 11744- 11754. |
| 14 |
FAN Q G , SUN B W , AN S , et al. Performance enhancement of MEMS-based INS/UWB integration for indoor navigation applications[J]. IEEE Sensors Journal, 2017, 17 (10): 3116- 3130.
doi: 10.1109/JSEN.2017.2689802 |
| 15 |
LI M G , ZHU H , YOU S Z , et al. UWB-based localization system aided with inertial sensor for underground coal mine applications[J]. IEEE Sensors Journal, 2020, 20 (12): 6652- 6669.
doi: 10.1109/JSEN.2020.2976097 |
| 16 |
DE-COCK C , TANGHE E , JOSEPH W , et al. Robust IMU-based mitigation of human body shadowing in UWB indoor positioning[J]. Sensors, 2023, 23 (19): 8289.
doi: 10.3390/s23198289 |
| 17 | LIU A, LIN S W, WANG J G, et al. A method for non-line of sight identification and delay correction for UWB indoor positioning[C]//Proc. of the IEEE 17th Conference on Industrial Electronics and Applications, 2022: 9-14. |
| 18 | 李倩, 蒋正华, 孙炎, 等. 基于因子图的INS/UWB室内行人紧组合定位技术[J]. 仪器仪表学报, 2022, 43 (5): 32- 45. |
| LI Q , JIANG Z H , SUN Y , et al. INS/UWB tight integrated localization technology for pedestrian indoor based on factor graph[J]. Chinese Journal of Scientific Instrument, 2022, 43 (5): 32- 45. | |
| 19 | NAHEEM K , KIM M S . A robust indoor pedestrian localization approach against human body shadowing for UWB-enabled smartphones[J]. IEEE Trans.on Instrumentation and Mea-surement, 2024, 73, 9505013. |
| 20 |
ZHANG H , WANG Q , LI Z H , et al. Research on high precision positioning method for pedestrians in indoor complex environments based on UWB/IMU[J]. Remote Sensing, 2023, 15 (14): 3555.
doi: 10.3390/rs15143555 |
| 21 | ZHU J , KIA S S . Decentralized cooperative localization with LOS and NLOS UWB inter-agent ranging[J]. IEEE Sensors Journal, 2021, 22 (6): 5447- 5456. |
| 22 |
LI Z , DENG Z H , MENG Z D , et al. Coriolis-based heading estimation for pedestrian inertial localization based on MEMS MIMU[J]. IEEE Internet of Things Journal, 2024, 11 (16): 27509- 27517.
doi: 10.1109/JIOT.2024.3398431 |
| 23 | GUO H M, URADZINSKI M. The usability of MTI IMU sensor data in PDR indoor positioning[C]//Proc. of the IEEE 25th International Conference on Integrated Navigation Systems, 2018. |
| 24 |
ELSANHOURY M , MAKELA P , KOLJONEN J , et al. Precision positioning for smart logistics using ultra-wideband technology-based indoor navigation: a review[J]. IEEE Access, 2022, 10, 44413- 44445.
doi: 10.1109/ACCESS.2022.3169267 |
| 25 |
NAHEEM K , KIM M S . A low-cost foot-placed UWB and IMU fusion-based indoor pedestrian tracking system for IoT applications[J]. Sensors, 2022, 22 (21): 8160.
doi: 10.3390/s22218160 |
| 26 |
文张建, 赵立业, 沈翔. GRU-DNN改进的行人导航零速检测方法[J]. 导航定位学报, 2022, 10 (5): 97- 104.
doi: 10.3969/j.issn.2095-4999.2022.05.014 |
|
WEN Z J , ZHAO L Y , SHEN X . An improved zero-velocity detection method of pedestrian navigation based on GRU-DNN[J]. Journal of Navigation and Positioning, 2022, 10 (5): 97- 104.
doi: 10.3969/j.issn.2095-4999.2022.05.014 |
|
| 27 | 陈泽, 潘献飞, 陈昶昊, 等. 一种用于足绑式行人惯性导航的区间搜索零速检测器[J]. 中国惯性技术学报, 2020, 28 (6): 709- 715. |
| CHEN Z , PAN X F , CHEN C H . A zero-velocity detector based on interval search for foot-mounted pedestrian inertial navigation[J]. Journal of Chinese Inertial Technology, 2020, 28 (6): 709- 715. | |
| 28 |
杨海, 李威, 张禾, 等. 复杂坏境下基于SINS/UWB的容错组合定位技术研究[J]. 仪器仪表学报, 2017, 38 (9): 2177- 2185.
doi: 10.3969/j.issn.0254-3087.2017.09.011 |
|
YANG H , LI W , ZHANG H , et al. Fault tolerant integrated positioning system based on SINS/UWB in complex environment[J]. Chinese Journal of Scientific Instrument, 2017, 38 (9): 2177- 2185.
doi: 10.3969/j.issn.0254-3087.2017.09.011 |
|
| 29 |
YUAN S W , ZHANG Y B , SHI Y T , et al. A novel ESKF based ZUPT using midpoint integration approach for indoor pedestrian navigation[J]. IEEE Sensors Journal, 2024, 24 (7): 10920- 10932.
doi: 10.1109/JSEN.2024.3365979 |
| 30 |
WANG Q , FU M X , WANG J Q , et al. Free-walking: pedestrian inertial navigation based on dual foot-mounted IMU[J]. Defence Technology, 2024, 33, 573.
doi: 10.1016/j.dt.2023.03.001 |
| 31 | NILSSON J O, GUPTA A K, HANDEL P. Foot-mounted inertial navigation made easy[C]// Proc. of the IEEE International Conference on Indoor Positioning and Indoor Navigation, 2014: 24-29. |
| 32 | WANG Y, CHERNYSHOFF A, SHKEL A M. Error analysis of ZUPT-aided pedestrian inertial navigation[C]//Proc. of the IEEE International Conference on Indoor Positioning and Indoor Navigation, 2018: 206-212. |
| 33 | WANG J Y , LIU J H , XU X B , et al. A yaw correction method for pedestrian positioning using two low-cost MIMUs[J]. Mea-surement, 2023, 217, 112992. |
| 34 | 刘培原, 王坚, 盛坤鹏, 等. 非视距误差神经网络改正的超宽带定位模型研究[J]. 导航定位与授时, 2020, 7 (3): 93- 104. |
| LIU P Y , WANG J , SHENG K P , et al. Research on UWB positioning model corrected by non-line-of-sight error neural network[J]. Navigation Positioning & Timing, 2020, 7 (3): 93- 104. | |
| 35 | 李得海, 吴文坛, 马会林, 等. 室内测距型基站组网定位性能分析[J]. 武汉大学学报(信息科学版), 2025, 50 (1): 1- 10. |
| LI D H , WU W T , MA H L , et al. Positioning performance of the indoor networks of range-based reference stations[J]. Geomatics and Information Science of Wuhan University, 2025, 50 (1): 1- 10. | |
| 36 | ZHANG X D, REN M R, WANG P, et al. A new zero velocity update algorithm for the shoe-mounted personal navigation system based on IMU[C]//Proc. of the 34th Chinese Control Conference, 2015. |
| [1] | Hongde DAI, Yufeng MA, Shaowu DAI, Baidong ZHENG, Xiaoyu ZHANG. Zero velocity update algorithm for inertial pedestrian navigation based on nonlinear prediction of heading error [J]. Systems Engineering and Electronics, 2023, 45(8): 2555-2561. |
| [2] | Wei GAO, Yafeng LI, Kedong WANG. Design of ultra-tightly integrated GNSS/SINS simulation platform in signal level [J]. Systems Engineering and Electronics, 2023, 45(1): 184-192. |
| [3] | Jun WENG, Xiaoyun BIAN. Effect analysis and compensation of the high precision ring laser gyroscope inertial navigation system ZUPT caused by gravity disturbance [J]. Systems Engineering and Electronics, 2020, 42(1): 179-183. |
| [4] | LIU Shuai, SUN Fu-ping, ZHANG Lun-dong. Research on the tight integration of ambiguity-fixed PPP and INS [J]. Systems Engineering and Electronics, 2016, 38(10): 2389-2394. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||