Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (1): 230-243.doi: 10.12305/j.issn.1001-506X.2025.01.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Optimization algorithm for UAV formation consensus based on motion constraint
Jinxin LIU, Wei SHENG, Yumin ZHANG
- School of Instrument Science and Optoelectronic Engineering, Beihang University, Beijing 100191, China
-
Received:2024-01-24Online:2025-01-21Published:2025-01-25 -
Contact:Wei SHENG
CLC Number:
Cite this article
Jinxin LIU, Wei SHENG, Yumin ZHANG. Optimization algorithm for UAV formation consensus based on motion constraint[J]. Systems Engineering and Electronics, 2025, 47(1): 230-243.
share this article

Fig.1
Coordinate conversion diagram"
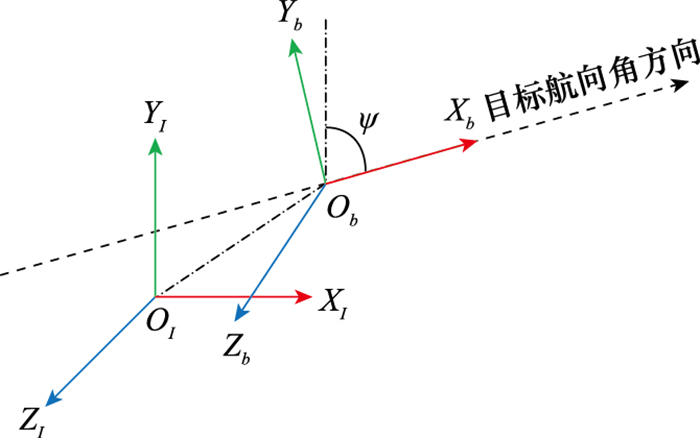
Table 1
Formation convergence time and number of iterations"
| 仿真组别 | 收敛时间/s | 迭代次数 |
| 仿真(I) | 107.777 | 5 389 |
| 仿真(II) | 109.798 | 5 490 |
| 仿真(III) | 95.180 | 4 759 |
| 仿真(IV) | 98.773 | 4 939 |

Fig.2
XOY plane flight trajectory of each unmanned aerial vehicle in formation"

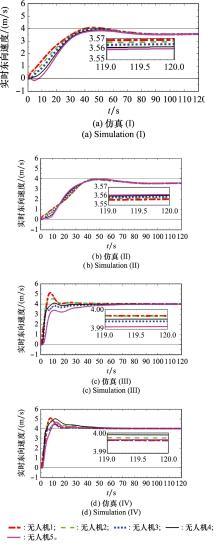
Fig.3
Real-time eastward velocity curve of each unmanned aerial vehicle in formation"

Table 2
Real-time status of each unmanned aerial vehicle in formation at the 120 s"
| 仿真组别 | 编队内各无人机的实时位置/m | 编队内各无人机的实时东向速度和北向速度/(m/s) | 编队内各无人机的实时航向角/(°) |
| 仿真(I) | |||
| 仿真(II) | |||
| 仿真(Ⅲ) | |||
| 仿真(Ⅳ) |
Table 3
Error between real-time state and its ideal state of each unmanned aerial vehicle in formation at the 120 s"
| 仿真组别 | 编队内各无人机的实时位置与其理想位置的误差/m | 编队内各无人机的实时东向速度和北向速度与各自理想速度的误差/(m/s) | 编队内各无人机实时航向角与其理想航向角误差/(°) |
| 仿真(I) | |||
| 仿真(II) | |||
| 仿真(Ⅲ) | |||
| 仿真(Ⅳ) |

Fig.4
Eastward relative position error curve of five unmanned aerial vehicles in comparison simulations"
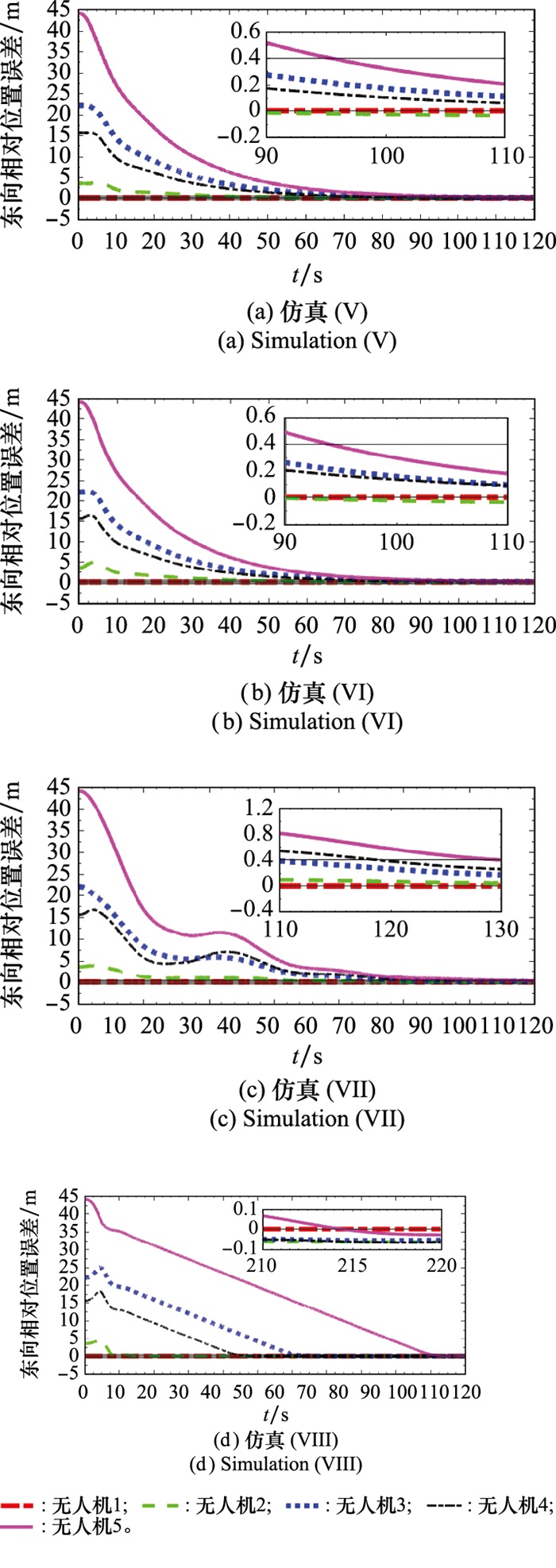

Fig.5
Northward relative position error curve of five unmanned aerial vehicles in comparison simulations"


Fig.6
Real-time eastward velocity curve of five unmanned aerial vehicles in comparison simulations"


Fig.7
Real-time northward velocity curve of five unmanned aerial vehicles in comparison simulations"
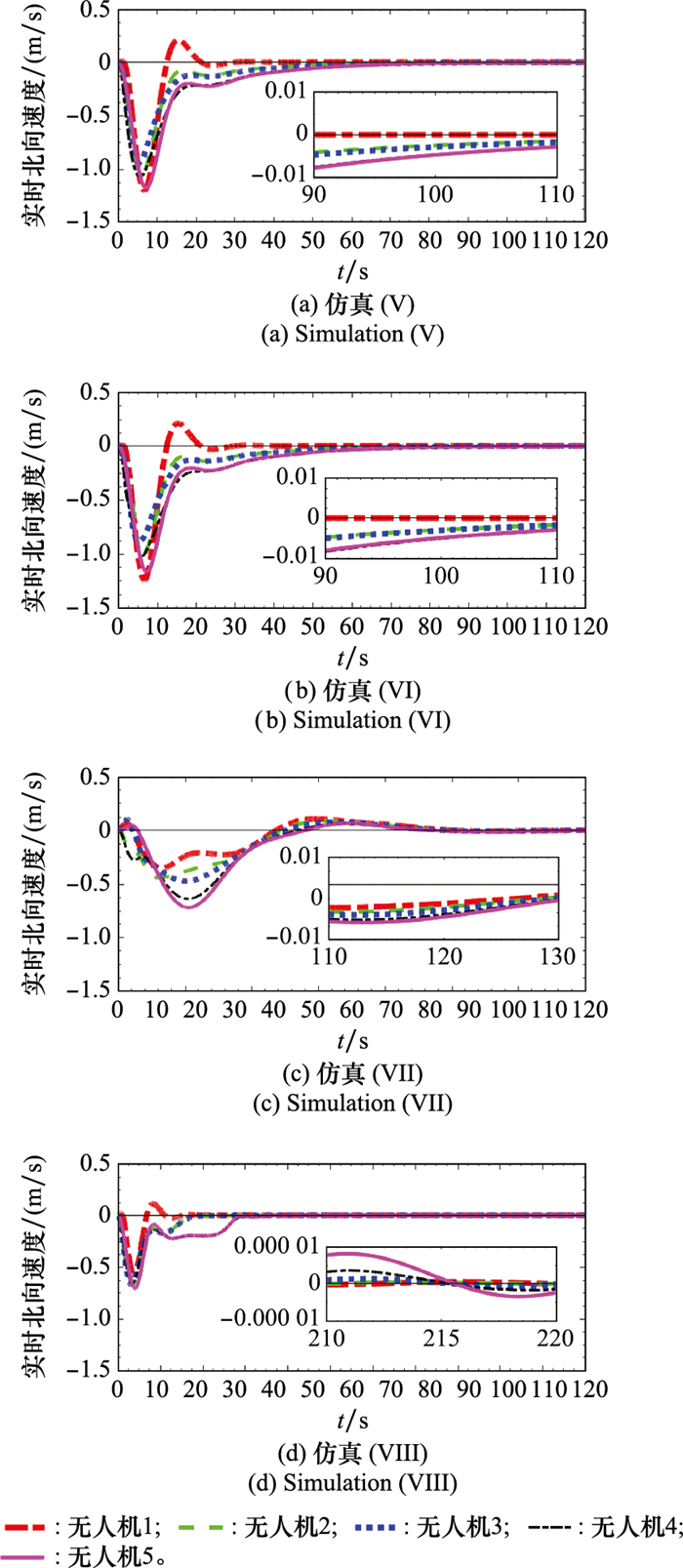
Table 4
Ideal position of each unmanned aerial vehicle in formation at the time of formation convergence"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时理想位置/m |
| 仿真(V) | 95.378 0 | 4 769 | |
| 仿真(VI) | 93.971 0 | 4 699 | |
| 仿真(VII) | 129.630 | 6 482 | |
| 仿真(VIII) | 201.530 | 10 077 |
Table 5
Real-time state of each unmanned aerial vehicle in formation at the time of formation convergence"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时位置/m | 编队内各无人机的实时东向速度和北向速度/(m/s) | 编队内各无人机的实时航向角/(°) |
| 仿真(V) | 95.378 0 | 4 769 | |||
| 仿真(VI) | 93.971 0 | 4 699 | |||
| 仿真(VII) | 129.630 | 6 482 | |||
| 仿真(VIII) | 201.530 | 10 077 |
Table 6
Error between real-time state and its ideal state of each unmanned aerial vehicles in formation at the time of formation convergence"
| 仿真组别 | 编队收敛时间/s | 编队收敛迭代次数 | 编队内各无人机的实时位置与其理想位置的误差/m | 编队内各无人机的实时东向速度和北向速度与各自理想速度的误差/(m/s) | 编队内各无人机的实时航向角与其理想航向角的误差/(°) |
| 仿真(V) | 95.378 0 | 4 769 | |||
| 仿真(VI) | 93.971 0 | 4 699 | |||
| 仿真(VII) | 129.630 | 6 482 | |||
| 仿真(VIII) | 201.530 | 10 077 |
| 1 |
VLADIMIRD.Cooperative path planning of unmanned aerial vehicles[J].Journal of Guidance, Control, and Dynamics,2011,34(5):1601-1602.
doi: 10.2514/1.54851 |
| 2 |
RENW,BEARDR W.Consensus seeking in multiagent systems under dynamically changing interaction topologies[J].IEEE Trans.on Automatic Control,2005,50(5):655-661.
doi: 10.1109/TAC.2005.846556 |
| 3 |
MOREAUL.Stability of multi-agent systems with time-depen-dent communication links[J].IEEE Trans.on Automatic Control,2005,50(2):169-182.
doi: 10.1109/TAC.2004.841888 |
| 4 |
KURIKIY,NAMERIKAWAT.Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control[J].SICE Journal of Control, Measurement, and System Integration,2015,8(4):285-294.
doi: 10.9746/jcmsi.8.285 |
| 5 |
GHOMMAMJ,LUQUE-VEGAL F,CASTILLO-TOLEDOB,et al.Three-dimensional distributed tracking control for multiple quadrotor helicopters[J].Journal of the Franklin Institute,2016,353(10):2344-2372.
doi: 10.1016/j.jfranklin.2016.04.003 |
| 6 | ROJO-RODRIGUEZ1E G,GARCIA1O,OLLERVIDESE J,et al.Robust consensus-based formation flight for multiple quadrotors[J].Journal of Intelligent & Robotic Systems,2019,93(1):216-226. |
| 7 |
YUD Y,ZHOUP F,JINGY H.Optimal obstacle avoidance consensus formation control method for fixed-wing UAV with variable topology[J].Aerospace Systems,2022,5(1):75-84.
doi: 10.1007/s42401-021-00119-5 |
| 8 | REN W. Consensus based formation control strategies for multi-vehicle systems[C]//Proc. of the American Control Confe-rence, 2006: 4237-4242. |
| 9 | YANM D,ZHUX,ZHANGX X,et al.Consensus-based three-dimensional multi-UAV formation control strategy with high precision[J].Frontiers of Information Technology & Electronic Engineering,2017,18(7):968-978. |
| 10 |
WUY,GOUJ Z,HUX T,et al.A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J].Aerospace Science and Technology,2020,107,106332.
doi: 10.1016/j.ast.2020.106332 |
| 11 |
YANGT,MENGZ Y,DIMAROGONASD V,et al.Global consensus for discrete-time multi-agent systems with input satu- ration constraints[J].Automatica,2014,50(2):499-506.
doi: 10.1016/j.automatica.2013.11.008 |
| 12 |
SHEND,XUJ X.Distributed learning consensus for heterogenous high-order nonlinear multi-agent systems with output constraints[J].Automatica,2018,97,64-72.
doi: 10.1016/j.automatica.2018.07.030 |
| 13 |
FUJ J,WANY,WENG H,et al.Distributed robust global containment control of second-order multiagent systems with input saturation[J].IEEE Trans.on Control of Network Systems,2019,6(4):1426-1437.
doi: 10.1109/TCNS.2019.2893665 |
| 14 | 周健,龚春林,谷良贤,等.非匹配不确定性条件下的编队分布式协同控制[J].系统工程与电子技术,2019,41(3):636-642. |
| ZHOUJ,GONGC L,GUL X,et al.Distributed synchronization of leader-follower system with unmatched uncertainties[J].Systems Engineering and Electronics,2019,41(3):636-642. | |
| 15 |
LIANGY Q,DONGQ,ZHAOY J.Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances[J].Chinese Journal of Aeronautics,2020,33(11):2972-2988.
doi: 10.1016/j.cja.2020.03.020 |
| 16 |
QID,HUJ H,LIANGX L,et al.Research on consensus of multi-agent systems with and without input saturation constraints[J].Journal of Systems Engineering and Electronics,2021,32(4):947-955.
doi: 10.23919/JSEE.2021.000081 |
| 17 |
XUB,WANGZ Y,SHENH.Distributed predictive formation control for autonomous underwater vehicles under dynamic switching topology[J].Ocean Engineering,2022,262,112240.
doi: 10.1016/j.oceaneng.2022.112240 |
| 18 | 苟进展,吴宇,邓嘉宁.基于群智能-一致性理论的无人机编队全过程飞行航迹规划方法[J].控制与决策,2023,38(5):1464-1472. |
| GOUJ Z,WUY,DENGJ N.Swarm intelligence and consensus theory based trajectory planning for a complete flight of UAV formation[J].Control and Decision,2023,38(5):1464-1472. | |
| 19 |
YANGY,LIR,HUANGJ S,et al.Distributed optimal output feedback consensus control for nonlinear Euler-Lagrange systems under input saturation[J].Journal of the Franklin Institute,2023,360(8):5857-5877.
doi: 10.1016/j.jfranklin.2023.03.042 |
| 20 |
WANGG,ZUOZ Y,WANGC L.Robust consensus control of second-order uncertain multiagent systems with velocity and input constraints[J].Automatica,2023,157,111226.
doi: 10.1016/j.automatica.2023.111226 |
| 21 |
SUJ C,WANGS,WANGY N.Group consensus for competitive multiagent systems with input saturation and intermittent communication using current and outdated states[J].Neurocomputing,2023,560,126846.
doi: 10.1016/j.neucom.2023.126846 |
| 22 |
WANQ,CAOL,PANY N,et al.Improved prescribed performance fuzzy control for nonlinear multiagent systems with actuator faults and dual input saturations[J].European Journal of Control,2024,75,100937.
doi: 10.1016/j.ejcon.2023.100937 |
| 23 |
CONGY Z,DUH B,LIUB B,et al.Distributed constrained finite-time consensus algorithm for second-order multi-agent systems[J].Information Sciences,2023,626,773-786.
doi: 10.1016/j.ins.2023.01.080 |
| 24 |
JIJ W,ZHANGZ C,ZUOZ Q,et al.Event-triggered global consensus of second-order multi-agent systems with asymmetric input saturation[J].Neurocomputing,2024,574,127287.
doi: 10.1016/j.neucom.2024.127287 |
| 25 |
熊涛,曹科才,柴运,等.基于输入约束一致性算法的多无人机编队控制[J].计算机工程与应用,2018,54(12):51-56, 125.
doi: 10.3778/j.issn.1002-8331.1704-0458 |
|
XIONGT,CAOK C,CHAIY,et al.Consensus algorithm with input constraint based formation control for multiple UAVs[J].Computer Engineering and Applications,2018,54(12):51-56, 125.
doi: 10.3778/j.issn.1002-8331.1704-0458 |
|
| 26 | 胡锦帆.基于虚拟领航者的无人机一致性编队控制[J].电子测量技术,2023,46(22):70-77. |
| HUJ F.Consensus control for UAV formation with virtual leader based[J].Computer Engineering and Applications,2023,46(22):70-77. | |
| 27 |
MAX Y,LIUJ K.Consensus control for multi-agent systems with input constraints based on disturbance observer[J].Journal of the Franklin Institute,2024,361,106604.
doi: 10.1016/j.jfranklin.2024.01.005 |
| 28 |
LUM Y,WUJ,ZHANX S,et al.Consensus of second-order heterogeneous multi-agent systems with and without input satu- ration[J].ISA Transactions,2022,126,14-20.
doi: 10.1016/j.isatra.2021.08.001 |
| 29 |
CHENY B,YUJ Q,MEIY S,et al.Trajectory optimization of multiple quad-rotor UAVs in collaborative assembling task[J].Chinese Journal of Aeronautics,2016,29(1):184-201.
doi: 10.1016/j.cja.2015.12.008 |
| 30 |
ZHANGX W,SHENH M,XIEG H,et al.Decentralized motion planning for multi quadrotor with obstacle and collision avoidance[J].International Journal of Intelligent Robotics and Applications,2021,5(2):176-185.
doi: 10.1007/s41315-021-00183-2 |
| 31 |
CUMINT B,BELLINGHAMJ G.Autonomous oceanographic sampling networks[J].Oceanography,1993,6(3):86-94.
doi: 10.5670/oceanog.1993.03 |
| [1] | Bo YANG, Feng LIU, Liang XUE, Yunfeng LIU. Independent error compensation method of attitude and heading system based on motion constraints [J]. Systems Engineering and Electronics, 2024, 46(6): 2099-2106. |
| [2] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [3] | Xiaowei FU, Zihao CHEN. Cooperative capture control method for multi-UAV based on consensus protocol [J]. Systems Engineering and Electronics, 2021, 43(9): 2501-2507. |
| [4] | LIN Juncan, JIA Gaowei, HOU Zhongxi. Research on task assignment of heterogeneous UAV formation in the anti-radar combat [J]. Systems Engineering and Electronics, 2018, 40(9): 1986-1992. |
| [5] | LI Xiang, XING Qing-hua, DONG Tao. Deployment optimization of UAV formation based on multi-index orthogonal experimental design [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 331-337. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||