Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (10): 3528-3535.doi: 10.12305/j.issn.1001-506X.2024.10.29
• Guidance, Navigation and Control • Previous Articles
Space satisfaction planning for curved virtual tube of unmanned aerial vehicle swarm
Shibo XIAO1, Guoyuan QI1,*, Jiahao DENG1, Pengpeng SU1, Jingtong JIA2
- 1. School of Control Science and Engineering, Tiangong University, Tianjin 300387, China
2. School of Electronics and Information Engineering, Tiangong University, Tianjin 300387, China
-
Received:2023-07-14Online:2024-09-25Published:2024-10-22 -
Contact:Guoyuan QI
CLC Number:
Cite this article
Shibo XIAO, Guoyuan QI, Jiahao DENG, Pengpeng SU, Jingtong JIA. Space satisfaction planning for curved virtual tube of unmanned aerial vehicle swarm[J]. Systems Engineering and Electronics, 2024, 46(10): 3528-3535.
share this article

Fig.1
Flowchart of virtual tube path search algorithm"


Fig.2
Schematic diagram of two-dimensional space detection"


Fig.3
Schematic diagram for the jth segment of three-dimensional space detection"


Fig.4
Schematic diagram of expanding RRT*"


Fig.5
B-spline convex hull property"

Table 1
Path searching parameter"
| 参数 | 数值 |
| 最大搜索次数/次 | 50 000 |
| 搜索步长 | 30 |

Fig.6
Comparison diagram of two-dimensional paths"

Table 2
Detailed data of two path searching methods"
| 参数 | 序号 | RRT* | 虚拟管道路径搜索 |
| 时间/μs | 1 | 2.106 5 | 9.201 5 |
| 2 | 2.534 7 | 4.467 6 | |
| 3 | 5.081 1 | 7.384 3 | |
| 4 | 9.884 2 | 10.266 0 | |
| sp | 1 | 22.3 | 40.0 |
| 2 | 23.6 | 40.0 | |
| 3 | 40.0 | 40.0 | |
| 4 | 14.3 | 25.0 |

Fig.7
Simulation visualization in three-dimensional space"

Table 3
Optimization parameter"
| 参数 | 数值 |
| λs | 0.6 |
| λc | 1.0 |

Fig.8
Simulation of virtual tube planning"

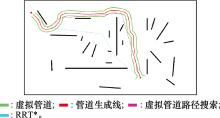
Fig.9
Comparison of path and virtual tube"

Table 4
Unmanned aerial vehicle parameters"
| 参数 | 数值 |
| 最大速度/(m/s) | 1.0 |
| 安全半径/m | 2.0 |
| 避让半径/m | 4.0 |
| 检测半径/m | 6.0 |
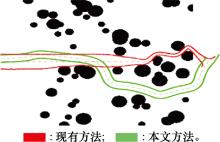
Fig.10
Comparison of two methods for planning virtual tube"


Fig.11
Flight simulation test of 15 unmanned aerial vehicles swarm"
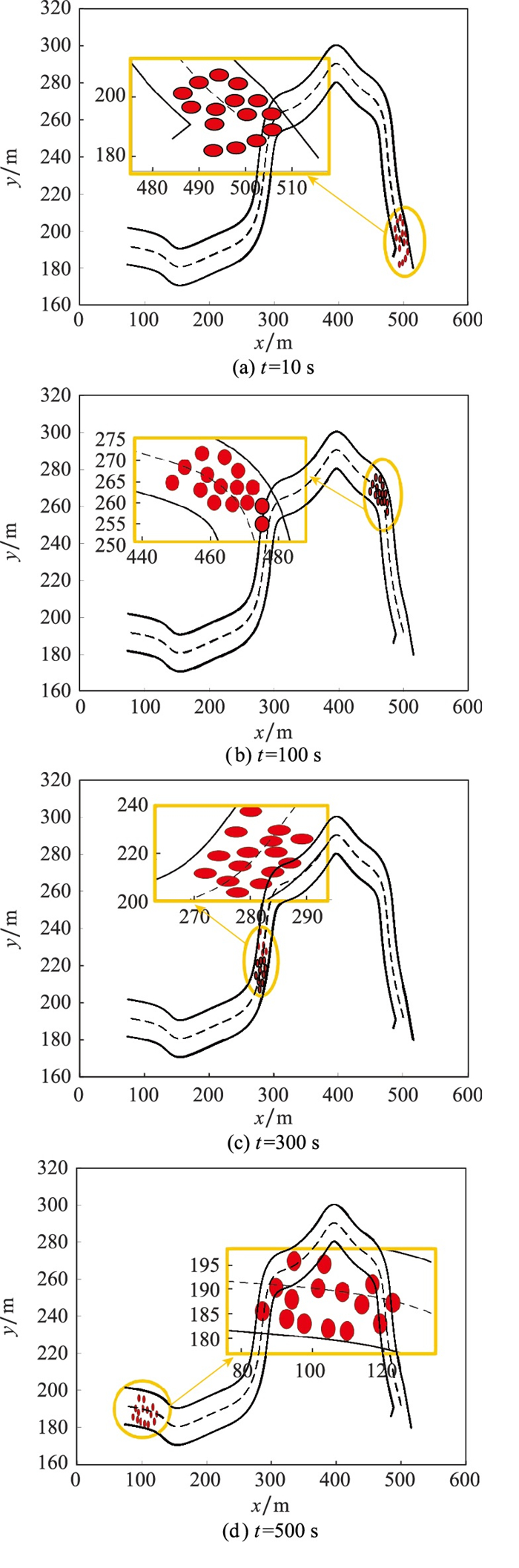

Fig.12
Passage time of two types of virtual tube"


Fig.13
RflySim's visualization interface"

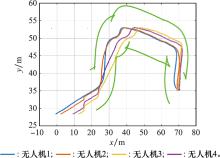
Fig.14
RflySim's simulation trajectory"

| 1 | 齐小刚, 周雨桐, 刘立芳. 无人机集群对地作战任务可靠性评估[J]. 系统工程与电子技术, 2023, 45 (9): 2971- 2978. |
| QI X G , ZHOU Y T , LIU L F . Evaluation of the reliability of UAV swarm for ground combat missions[J]. Systems Engineering and Electronics, 2023, 45 (9): 2971- 2978. | |
| 2 | 张洪海, 任真苹, 冯讴歌, 等. 城市低空物流无人机飞行计划预先调配[J]. 系统工程与电子技术, 2023, 45 (9): 2802- 2811. |
| ZHANG H H , REN Z P , FENG O G , et al. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace[J]. Systems Engineering and Electronics, 2023, 45 (9): 2802- 2811. | |
| 3 | 王宁, 李哲, 梁晓龙, 等. 通信距离受限条件下的无人机集群协同区域搜索[J]. 系统工程与电子技术, 2022, 44 (5): 1615- 1625. |
| WANG N , LI Z , LIANG X L , et al. Cooperative region search of UAV swarm with limited communication distance[J]. Systems Engineering and Electronics, 2022, 44 (5): 1615- 1625. | |
| 4 |
CHUNG S J , PARANJAPE A A , DAMES P , et al. A survey on aerial swarm robotics[J]. IEEE Trans.on Robotics, 2018, 34 (4): 837- 855.
doi: 10.1109/TRO.2018.2857475 |
| 5 | MIAO Z, THAKUR D, ERWIN R S, et al. Orthogonal vector field-based control for a multi-robot system circumnavigating a moving target in 3D[C]//Proc. of the IEEE 55th Conference on Decision and Control, 2016: 6004-6009. |
| 6 |
WANG L , AMES A D , EGERSTEDT M . Safety barrier certificates for collisions-free multirobot systems[J]. IEEE Trans.on Robotics, 2017, 33 (3): 661- 674.
doi: 10.1109/TRO.2017.2659727 |
| 7 |
VASARHELYI G , VIRAGH C , SOMORJAI G , et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3 (20): eaat3536.
doi: 10.1126/scirobotics.aat3536 |
| 8 | QUAN Q , FU R , LI M X , et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Trans.on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 9 | GAO Y , BAI C G , QUAN Q . Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube[J]. IEEE Trans.on Control of Network Systems, 2022, 10 (2): 693- 705. |
| 10 |
QUAN Q , GAO Y , BAI C G . Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 11 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498-4504. |
| 12 | TSENG F H, LIANG T T, LEE C H, et al. A star search algorithm for civil UAV path planning with 3G communication[C]// Proc. of the IEEE 10th International Conference on Intelligent Information Hiding and Multimedia Signal Processing, 2014: 942-945. |
| 13 | KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2011: 1478-1483. |
| 14 | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 2520-2525. |
| 15 | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[C]// Proc. of the 16th International Symposium for Robotics Research, 2016: 649-666. |
| 16 |
LIU S , WATTERSON M , MOHTA K , et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 17 | PARK J , KIM H J . Online trajectory planning for multiple quadrotors in dynamic environments using relative safe flight corridor[J]. IEEE Robotics and Automation Letters, 2020, 6 (2): 659- 666. |
| 18 | GAO F, WU W, LIN Y, et al. Online safe trajectory generation for quadrotors using fast marching method and Bernstein basis polynomial[C]//Proc. of the IEEE International Confe-rence on Robotics and Automation, 2018: 344-351. |
| 19 |
ZHOU B Y , GAO F , WANG L Q , et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 3529- 3536.
doi: 10.1109/LRA.2019.2927938 |
| 20 | ZHOU X , WANG Z P , YE H K , et al. EGO-planner: an ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2020, 6 (2): 478- 485. |
| 21 |
ZHOU B , PAN J , GAO F , et al. Raptor: robust and perception-aware trajectory replanning for quadrotor fast flight[J]. IEEE Trans.on Robotics, 2021, 37 (6): 1992- 2009.
doi: 10.1109/TRO.2021.3071527 |
| 22 |
GAO Y , BAI C G , ZHANG L , et al. Multi-UAV cooperative target encirclement within an annular virtual tube[J]. Aerospace Science and Technology, 2022, 128, 107800.
doi: 10.1016/j.ast.2022.107800 |
| 23 | FU R , QUAN Q , LI M X , et al. Practical distributed control for cooperative multicopters in structured free flight concepts[J]. IEEE Trans.on Intelligent Transportation Systems, 2022, 24 (4): 4203- 4216. |
| 24 |
MAO P D , FU R , QUAN Q . Optimal virtual tube planning and control for swarm robotics[J]. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 25 | LYU S L, GAO Y, CHE J X, et al. Autonomous drone racing: time-optimal spatial iterative learning control within a virtual tube[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2023: 3197-3203. |
| 26 | 杨小草, 都延丽, 步雨浓, 等. 基于层次分解的在线三维RRT*协同航路规划[J]. 系统工程与电子技术, 2023, 45 (5): 1409- 1419. |
| YANG X C , DU Y L , BU Y N , et al. Online three-dimensional RRT*cooperative route planning based on hierarchical decomposition[J]. Systems Engineering and Electronics, 2023, 45 (5): 1409- 1419. | |
| 27 | 高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42 (1): 101- 107. |
| GAO S , AI J L , WANG Z H . Mixed population RRT algorithm for UAV path planning[J]. Systems Engineering and Electronics, 2020, 42 (1): 101- 107. | |
| 28 |
WANG Z P , ZHOU X , XU C , et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Trans.on Robotics, 2022, 38 (5): 3259- 3278.
doi: 10.1109/TRO.2022.3160022 |
| 29 | QUINLAN S, KHATIB O. Elastic bands: connecting path planning and control[C]//Proc. of the IEEE International Conference on Robotics and Automation, 1993: 802-807. |
| 30 | WANG S, DAI X H, KE C X, et al. RflySim: a rapid multicopter development platform for education and research based on Pixhawk and Matlab[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2021: 1587-1594. |
| [1] | Cong LIU, Haifeng LI, Mingming WANG, Jianjun LUO. Robot motion planning method for space truss on-orbit assembly [J]. Systems Engineering and Electronics, 2024, 46(2): 715-721. |
| [2] | Baochen ZHANG, Jianjiang HUI, Qi ZHANG, Zhengxiong LIU, Panfeng HUANG. Touch interaction technology for obstacle avoidance motion planning of redundant manipulators [J]. Systems Engineering and Electronics, 2024, 46(1): 254-260. |
| [3] | Xun GONG, Yunbo FU, Liangxu JIANG, Ce CAO, Tongjian GUO. Application of super-twisting extended state observer in fault reconfiguration of quadrotor aircraft [J]. Systems Engineering and Electronics, 2020, 42(9): 2077-2084. |
| [4] | HE Youzhi, LIU Tongqi. Time delay integral backstepping based fault tolerant#br# control of quadrotor aircraft [J]. Systems Engineering and Electronics, 2015, 37(10): 2341-2346. |
| [5] | PENG Shuang-chun, SU Fei, PAN Liang, SHEN Lin-cheng. Motion planning for highaltitude highspeed aircraft based on dynamical symmetry [J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1534-1538. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||