Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (10): 3437-3450.doi: 10.12305/j.issn.1001-506X.2024.10.21
• Systems Engineering • Previous Articles
Review of research on multi-UAV collaborative mission planning method
Jianfeng WANG, Gaowei JIA, Zheng GUO, Zhongxi HOU
- College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
-
Received:2022-11-09Online:2024-09-25Published:2024-10-22 -
Contact:Gaowei JIA
CLC Number:
Cite this article
Jianfeng WANG, Gaowei JIA, Zheng GUO, Zhongxi HOU. Review of research on multi-UAV collaborative mission planning method[J]. Systems Engineering and Electronics, 2024, 46(10): 3437-3450.
share this article

Fig.1
Schematic diagram of mission planning process"


Fig.2
Schematic diagram of partial reset"

Table 1
Comparison of multiple path planning methods"
| 方法名称 | 内容 | 优/缺点 |
| 可视图法 | 连接起始点、目标点和多边形障碍顶点构成网络 | 构建简单, 但路径与障碍相距较近, 安全性低 |
| Voronoi图法 | 由围绕障碍物的多个共边多边形组成 | 路径安全性高, 但路径多在障碍之间的开阔区域, 路径质量不高 |
| 栅格法 | 使用互不重叠的单元离散区域 | 不需考虑障碍情况, 但数据量大, 需平衡离散精度和搜索效率 |
| 概率路标图法 | 空间预设大量采样点, 在此基础上搜索生成可行路径 | 复杂障碍场景中可生成可行路径, 但受采样点设置影响大 |
| 快速随机树法 | 从起点开始, 边布置采样点边搜索路径, 直至到达终点 | 适用于动态复杂障碍场景, 但受采样点生成参数影响大, 随机性高 |
| 人工势场法 | 构建虚拟力场引导目标沿最大梯度方向运动 | 适用于复杂多障碍场景, 但势场函数设置复杂 |
Table 2
Comparison of multiple path curves"
| 曲线名称 | 内容 | 优/缺点 |
| Dubins曲线 | 由直线和圆弧组成, 可增加盘旋或调整曲率控制长度 | 计算简单且长度最短, 但直线与圆弧连接处曲率不连续 |
| 贝塞尔曲线 | 由线段与节点组成, 通过控制节点来调整曲线空间分布 | 曲率连续, 但多段拼接困难, 不能进行局部调整 |
| B样条曲线 | 调整贝塞尔曲线的基函数, 以分段低阶曲线代替高阶曲线 | 支持多段拼接, 可局部修改, 但计算复杂 |
| 毕达哥拉斯曲线 | 满足毕达哥拉斯条件的参数化多项式曲线 | 曲率连续且长度可控, 但控制参数复杂 |

Fig.3
Classification of centralized methods"


Fig.4
Classification of distributed methods"
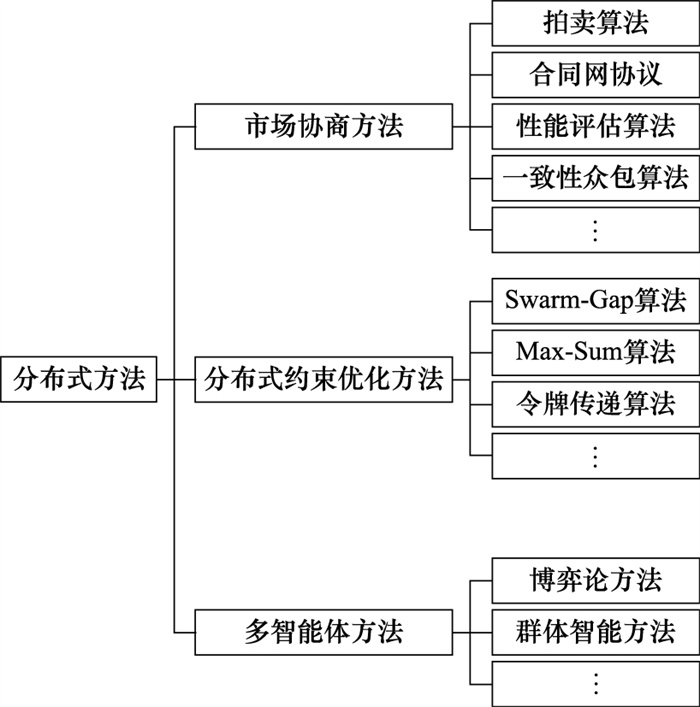

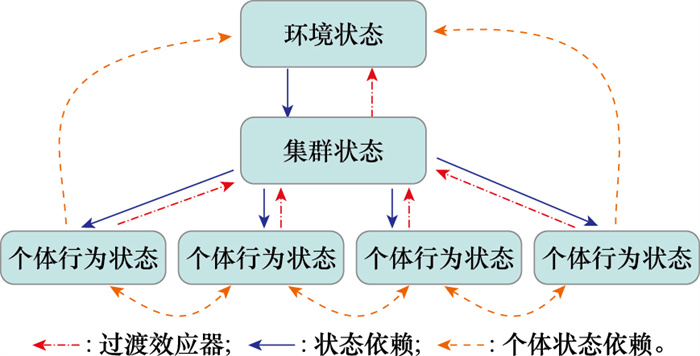
Fig.5
Architecture based on self-organizing emergence"
| 107 | JOHNSON L B, PONDA S S, CHOI H L, et al. Improving the effciency of a decentralized tasking algorithm for UAV teams with asynchronous communications[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2010: 8421. |
| 108 |
KIMK S,KIMH Y,CHOIH L.A bid-based grouping method for communication-efficient decentralized multi-UAV task allocation[J].International Journal of Aeronautical and Space Sciences,2020,21(1):290-302.
doi: 10.1007/s42405-019-00205-1 |
| 109 | SUSLOVA E, FAZLI P. Multi-robot task allocation with time window and ordering constraints[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020: 6909-6916. |
| 110 |
KAZAKOVAV A,WUA S,SUKTHANKARG R.Respecializing swarms by forgetting reinforced thresholds[J].Swarm Intelligence,2020,14(3):171-204.
doi: 10.1007/s11721-020-00181-3 |
| 111 | WUH S,LIH,XIAOR B,et al.Modeling and simulation of dynamic ant colony's labor division for task allocation of UAV swarm[J].Physica: A Statistical Mechanics & its Applications,2018,491(2018):127-141. |
| 112 | BAKOLAS E, LEE Y. Decentralized game-theoretic control for dynamic task allocation problems for multi-agent systems[C]//Proc. of the American Control Conference, 2021: 3228-3233. |
| 113 | JOHNSON L B, CHOI H L, HOW J P. Hybrid information and plan consensus in distributed task allocation[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013: 3405-3413. |
| 114 | NOWAK D J. Exploitation of self-organization in UAV swarms for optimization in combat environments[R]. Wright-Patterson AFB: Air Force Institute of Technology, 2008. |
| 115 | 段海滨,张岱峰,范彦铭,等.从狼群智能到无人机集群协同决策[J].中国科学: 信息科学,2019,49(1):112-118. |
| DUANH B,ZHANGD F,FANY M,et al.From wolf pack intelligence to UAV swarm cooperative decision-making[J].Scientia Sinica (Informationis),2019,43(1):112-118. | |
| 116 |
屈高敏,董彦非,岳源.对地攻击型无人机作战效能评估[J].火力与指挥控制,2016,41(4):145-149.
doi: 10.3969/j.issn.1002-0640.2016.04.036 |
|
QUG M,DONGY F,YUEY.Operational effectiveness evaluation of ground attack UCAV[J].Fire Control & Command Control,2016,41(4):145-149.
doi: 10.3969/j.issn.1002-0640.2016.04.036 |
|
| 117 | 何胜杰,郭强,王兴虎,等.基于ADC分析法优化的无人机效能评估方法[J].无人系统技术,2022,5(2):106-116. |
| HES J,GUOQ,WANGX H,et al.UAV performance evaluation method optimized based on ADC analysis method[J].Unmanned Systems Technology,2022,5(2):106-116. | |
| 118 | 黄吉传,周德云.无人机协同作战效能评估指标体系设计与分析[J].西安工业大学学报,2020,40(1):38-44. |
| HUANGJ C,ZHOUD Y.Design and analysis of an evaluation index system for UAV cooperative combat effectiveness[J].Journal of Xi'an Technological University,2020,40(1):38-44. | |
| 119 |
李坎.对地攻击型无人机群协同作战效能分析[J].指挥控制与仿真,2017,39(6):63-68.
doi: 10.3969/j.issn.1673-3819.2017.06.014 |
|
LIK.Effectiveness analysis of cooperative engagement for the ground attack unmanned aerial vehicles[J].Command Control & Simulation,2017,39(6):63-68.
doi: 10.3969/j.issn.1673-3819.2017.06.014 |
|
| 120 |
刘鹏,赵丹玲,谭跃进,等.面向多任务的武器装备体系贡献度评估方法[J].系统工程与电子技术,2019,41(8):1763-1770.
doi: 10.3969/j.issn.1001-506X.2019.08.13 |
|
LIUP,ZHAOD L,TANY J,et al.Multi-task oriented contribution evaluation method of weapon equipment system of systems[J].Systems Engineering and Electronics,2019,41(8):1763-1770.
doi: 10.3969/j.issn.1001-506X.2019.08.13 |
|
| 121 | 董新. 多功能UUV任务规划与评估方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| DONG X. Research on mission planning and evaluation method of multi-function UUV[D]. Harbin: Harbin Engineering University, 2014. | |
| 122 | 缪永飞. 多UAV联合搜救任务规划建模及优化方法研究[D]. 武汉: 武汉理工大学, 2017. |
| 1 | OTTO R P. Small unmanned aircraft systems (SUAS) flight plan: 2016-2036. Bridging the gap between tactical and strategic[R]. Washington, DC: United States Air Force, 2016. |
| 2 | 牛轶峰,沈林成,李杰,等.无人-有人机协同控制关键问题[J].中国科学: 信息科学,2019,49(5):538-554. |
| NIUY F,SHENL C,LIJ,et al.Key scientific problems in cooperation control of unmanned-manned aircraft systems[J].Scientia Sinica (Informationis),2019,49(5):538-554. | |
| 3 | 刘雷,刘大为,王晓光,等.无人集群与反无人集群发展现状分析[J].航空学报,2021,42(S1):526908. |
| LIUL,LIUD W,WANGX G,et al.Analysis the development status of unmanned clusters and anti-unmanned clusters[J].Acta Aeronautica et Astronautica Sinica,2021,42(S1):526908. | |
| 4 | 王祥科,刘志宏,丛一睿,等.小型固定翼无人机集群综述和未来发展综述[J].航空学报,2020,41(4):23732. |
| WANGX K,LIUZ H,CONGY R,et al.Miniature fixed-wing UAV swarms: review and outlook[J].Acta Aeronautica et Astronautica Sinica,2020,41(4):23732. | |
| 5 |
ZHANGJ,XINGJ H.Cooperative task assignment of multi-UAV system[J].Chinese Journal of Aeronautics,2020,33(11):2825-2827.
doi: 10.1016/j.cja.2020.02.009 |
| 6 | OHG,KIMY,AHNJ,et al.Market-based task assignment for cooperative timing missions in dynamic environments[J].Journal of Intelligent & Robotic Systems,2017,87(1):97-123. |
| 7 |
LIUH,LIX M,WUG H,et al.An iterative two-phase optimization method based on divide and conquer framework for integrated scheduling of multiple UAVs[J].IEEE Trans.on Intelligent Transportation Systems,2021,22(9):5926-5938.
doi: 10.1109/TITS.2020.3042670 |
| 8 |
XIEJ F,CARRILLOL R G,JINL.An integrated traveling salesman and coverage path planning problem for unmanned aircraft systems[J].IEEE Control Systems Letters,2019,3(1):67-72.
doi: 10.1109/LCSYS.2018.2851661 |
| 9 |
FERREIRAP R,SANTOSF D,BAZZANA L C,et al.RoboCup rescue as multiagent task allocation among teams: experiments with task interdependencies[J].Autonomous Agents and Multi-Agent Systems,2010,20(3):421-443.
doi: 10.1007/s10458-009-9087-8 |
| 10 | BUCKMAN N. Decentralized task allocation for dynamic, time-sensitive tasks[D]. Cambridge: Massachusetts Institute of Technology, 2018. |
| 11 |
GENGN,MENGQ S,GONGD W,et al.How good are distributed allocation algorithms for solving urban search and rescue problems? A comparative study with centralized algorithms[J].IEEE Trans.on Automation Science and Engineering,2019,16(1):478-485.
doi: 10.1109/TASE.2018.2866395 |
| 12 |
YAOW R,QIN M,WANN,et al.An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles[J].Aerospace Science and Technology,2019,86,455-464.
doi: 10.1016/j.ast.2019.01.061 |
| 13 |
WANGY,RUZ Y,WANGK Z,et al.Joint deployment and task scheduling optimization for large-scale mobile users in multi-UAV-enabled mobile edge computing[J].IEEE Trans.on Cybernetics,2020,50(9):3984-3997.
doi: 10.1109/TCYB.2019.2935466 |
| 14 |
贾高伟,王建峰.无人机集群任务规划方法研究综述[J].系统工程与电子技术,2021,43(1):99-111.
doi: 10.3969/j.issn.1001-506X.2021.01.13 |
|
JIAG W,WANGJ F.Research review of UAV swarm mission planning method[J].Systems Engineering and Electronics,2021,43(1):99-111.
doi: 10.3969/j.issn.1001-506X.2021.01.13 |
|
| 15 |
LIUZ H,WANGX K,SHENL C,et al.Mission-oriented miniature fixed-wing UAV swarms: a multilayered and distributed architecture[J].IEEE Trans.on Systems, Man, and Cybernetics: Systems,2022,52(3):1588-1602.
doi: 10.1109/TSMC.2020.3033935 |
| 16 | WANGZ,LIUL,LONGT,et al.Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding[J].Chinese Journal of Aeronautics,2017,31(2):339-350. |
| 17 |
ZHENZ Y,ZHUP,XUEY X,et al.Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J].Chinese Journal of Aeronautics,2019,32(12):2706-2716.
doi: 10.1016/j.cja.2019.05.012 |
| 18 |
CHENH X,NANY,YANGY.Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm[J].Sensors,2019,19(3):734.
doi: 10.3390/s19030734 |
| 122 | MIAO Y F. Research on modeling and optimization of mission planning for multi-UAVs in joint search-and-rescue mission[D]. Wuhan: Wuhan University of Technology, 2017. |
| 123 | 陈侠,胡乃宽.基于APSO-BP神经网络的无人机空地作战效能评估研究[J].飞行力学,2018,36(1):88-92. |
| CHENX,HUN K.Research on effectiveness evaluation of UAV air-to-ground attack based on APSO-BP neural network[J].Flight Dynamics,2018,36(1):88-92. | |
| 19 |
COOMBESM,FLETCHERT,CHENW H,et al.Optimal polygon decomposition for UAV survey coverage path planning in wind[J].Sensors,2018,18(7):2132.
doi: 10.3390/s18072132 |
| 20 | YEF,CHENJ,TIANY,et al.Cooperative multiple task assignment of heterogeneous UAVs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy[J].Journal of Intelligent & Robotic Systems,2020,100(2):615-627. |
| 21 |
MEYERY,ISAIAHP,SHIMAT.On Dubins paths to intercept a moving target[J].Automatica,2015,53,256-263.
doi: 10.1016/j.automatica.2014.12.039 |
| 22 | WUW N,WANGX G,CUIN G.Fast and coupled solution for cooperative mission planning of multiple heterogeneous unmanned aerial vehicles[J].Aerospace Science & Technology,2018,79,131-144. |
| 23 |
WANGJ F,JIAG W,LINJ C,et al.Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm[J].Journal of Central South University,2020,27(2):432-448.
doi: 10.1007/s11771-020-4307-0 |
| 24 |
MENGW,HEZ R,SUR,et al.Decentralized multi-UAV flight autonomy for moving convoys search and track[J].IEEE Trans.on Control Systems Technology,2017,25(4):1480-1487.
doi: 10.1109/TCST.2016.2601287 |
| 25 |
FUX W,FENGP,GAOX G.Swarm UAVs task and resource dynamic assignment algorithm based on task sequence mechanism[J].IEEE Access,2019,7,41090-41100.
doi: 10.1109/ACCESS.2019.2907544 |
| 26 |
YANF,ZHUX P,ZHOUZ,et al.Heterogeneous multi-unmanned aerial vehicle task planning: simultaneous attacks on targets using the Pythagorean hodograph curve[J].Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2019,233(13):4735-4749.
doi: 10.1177/0954410019829368 |
| 27 |
WUW N,CUIN G.A distributed and integrated method for cooperative mission planning of multiple heterogeneous UAVs[J].Aircraft Engineering and Aerospace Technology,2018,90(9):1403-1412.
doi: 10.1108/AEAT-05-2017-0124 |
| 28 |
DENGQ B,YUJ Q,MEIY S.Deadlock-free consecutive task assignment of multiple heterogeneous unmanned aerial vehicles[J].Journal of Aircraft,2014,51(2):596-605.
doi: 10.2514/1.C032309 |
| 29 |
KIMK S,KIMH Y,CHOIH L.Minimizing communications in decentralized greedy task allocation[J].Journal of Aerospace Information Systems,2019,16(8):340-345.
doi: 10.2514/1.I010624 |
| 30 | FUX W,FENGP,LIB,et al.A two-layer task assignment algorithm for UAV swarm based on feature weight clustering[J].International Journal of Aerospace Engineering,2019,2019,3504248. |
| 31 | XUG T,LONGT,WANGZ,et al.Target-bundled genetic algorithm for multi-unmanned aerial vehicle cooperative task assignment considering precedence constraints[J].Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2019,234(3):760-773. |
| 32 | KOPEIKIN A N, PONDA S S, JOHNSON L B, et al. Real-time dynamic planning to maintain network connectivity in a team of unmanned air vehicles[C]//Proc. of the IEEE Globecom Workshops, 2011: 1303-1307. |
| 33 |
LIUJ L,LIAOX H,YEH P,et al.UAV swarm scheduling method for remote sensing observations during emergency scenarios[J].Remote Sensing,2022,14(6):1406.
doi: 10.3390/rs14061406 |
| 34 |
WANGG G,CHUH E,MIRJALILIS.Three-dimensional path planning for UCAV using an improved bat algorithm[J].Aerospace Science and Technology,2016,49,231-238.
doi: 10.1016/j.ast.2015.11.040 |
| 35 | DUANH B,ZHAOJ X,DENGY M,et al.Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J].IEEE Trans.on Aerospace and Electronic Systems,2024,57(1):76-720. |
| 36 | YOMCHINDAT,HORNJ F,LANGELAANJ W.Modified dubins parameterization for aircraft emergency trajectory planning[J].Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2016,231(2):374-393. |
| 37 | MOON S, YANG K, GAN S, et al. Decentralized information-theoretic task assignment for searching and tracking of moving targets[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2015: 1031-1036. |
| 38 | 刘文金,裴扬,葛玉雪,等.基于ABMS的对地攻击型无人机体系贡献率评估[J].航空学报,2021,43(9):225972. |
| LIUW J,PEIY,GEY X,et al.System-of-systems contribution evaluation of ground-attack UCAV based on ABMS[J].Acta Areonautica et Astronautica Sinica,2021,43(9):225972. | |
| 39 | KURDI H A, HOW J P. Bio-inspired algorithm for task allocation in multi-UAV search and rescue missions[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2016: 2283-2291. |
| 40 | BUCKMAN N, HOW J P, CHOI H L. Partial replanning for decentralized dynamic task allocation[C]//Proc. of the AIAA Scitech Forum, 2019: 1174-1184. |
| 41 | MERCKER T, CASBEER D W, MILLET P T, et al. An extension of consensus-based auction algorithms for decentralized, time-constrained task assignment[C]//Proc. of the American Control Conference, 2010: 6324-6329. |
| 42 | KOPEIKINA N,PONDAS S,JOHNSONL B,et al.Dynamic mission planning for communication control in multiple unmanned aircraft teams[J].Unmanned Systems,2013,1(1):41-58. |
| 43 |
OTTOA,AGATZN,CAMPBELLJ,et al.Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: a survey[J].Networks,2018,72(4):411-458.
doi: 10.1002/net.21818 |
| 44 | HUC H,LUJ,LIUX,et al.Robust vehicle routing problem with hard time windows under demand and travel time uncertainty[J].Computers & Operations Research,2018,94,139-153. |
| 45 | MANDAL S, GAO T, BHATTACHARYA S. Planning for aerial robot teams for wide-area biometric and phenotypic data collection[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 2586-2591. |
| 46 |
ZHANGJ M,LIUZ,SHIJ,et al.Weapon configuration, allocation and route planning with time windows for multiple unmanned combat air vehicles[J].Journal of Systems Engineering and Electronics,2018,29(5):953-968.
doi: 10.21629/JSEE.2018.05.08 |
| 47 |
XUC,XUM,YINC J.Optimized multi-UAV cooperative path planning under the complex confrontation environment[J].Computer Communications,2020,162,196-203.
doi: 10.1016/j.comcom.2020.04.050 |
| 48 | MOONS,OHE,SHIMD H.An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J].Journal of Intelligent & Robotic Systems,2013,70(1):303-313. |
| 49 | JANGI,SHINH S,TSOURDOSA,et al.An integrated decision-making framework of a heterogeneous aerial robotic swarm for cooperative tasks with minimum requirements[J].Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2018,233(6):2101-2118. |
| 50 | DASDEMIRE,KOKSALANM,TEZCANER OZTURKD.A flexible reference point-based multi-objective evolutionary algorithm: an application to the UAV route planning problem[J].Computers & Operations Research,2020,114(2):104811. |
| 51 | SEETHALER J, STROHAL M, STÜTZ P. Measuring multi-UAV mission efficiency: concept validation and enhanced metrics[C]//Proc. of the International Conference on Modeling and Simulation for Autonomous Systems, 2022: 158-179. |
| 52 | SEETHALER J, STROHAL M, STÜTZ P. Multi-UAV mission efficiency: first results in an agent-based simulation[C]//Proc. of the International Conference on Modeling and Simulation for Autonomous Systems, 2020: 169-188. |
| 53 | GARCIAE,CASBEERD W.Cooperative task allocation for unmanned vehicles with communication delays and conflict resolution[J].Journal of Aerospace Information Systems,2016,13(2):1-13. |
| 54 | WHITTEN A K, CHOI H L, JOHNSON L B, et al. Decentralized task allocation with coupled constraints in complex missions[C]//Proc. of the American Control Conference, 2011: 1642-1649. |
| 55 |
NUNESE,MANNERM,MITICHEH,et al.A taxonomy for task allocation problems with temporal and ordering constraints[J].Robotics and Autonomous Systems,2017,90,55-70.
doi: 10.1016/j.robot.2016.10.008 |
| 56 |
CHENY B,YANGD,YUJ Q.Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J].IEEE Trans.on Aerospace and Electronic Systems,2018,54(6):2853-2872.
doi: 10.1109/TAES.2018.2831138 |
| 57 |
VERBEECKC,VANSTEENWEGENP,AGHEZZAFE H.Solving the stochastic time-dependent orienteering problem with time windows[J].European Journal of Operational Research,2016,255(3):699-718.
doi: 10.1016/j.ejor.2016.05.031 |
| 58 |
MUNARIP,MORENOA,VEGAJ D L,et al.The robust vehicle routing problem with time windows: compact formulation and branch-price-and-cut method[J].Transportation Science,2019,53(4):1043-1066.
doi: 10.1287/trsc.2018.0886 |
| 59 |
ZHAIZ Y,ORTEGAJ M,MARTINEZN L,et al.A mission planning approach for precision farming systems based on multi-objective optimization[J].Sensors,2018,18(6):1795.
doi: 10.3390/s18061795 |
| 60 | WHITBROOK A, MENG Q, CHUNG P W H. A novel distributed scheduling algorithm for time-critical multi-agent systems[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015: 6451-6458. |
| 61 |
YEF,CHENJ,SUNQ,et al.Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints[J].The Journal of Supercomputing,2021,77(1):111-132.
doi: 10.1007/s11227-020-03264-4 |
| 62 |
HUX X,LIUY H,WANGG Q.Optimal search for moving targets with sensing capabilities using multiple UAVs[J].Journal of Systems Engineering and Electronics,2017,28(3):526-535.
doi: 10.21629/JSEE.2017.03.12 |
| 63 | MILLET T, CASBEER D, MERCKER T, et al. Multi-agent decentralized search of a probability map with communication constraints[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2010: 8424. |
| 64 | CHENJ,QINGX G,YEF,et al.Consensus-based bundle algorithm with local replanning for heterogeneous multi-UAV system in the time-sensitive and dynamic environment[J].The Journal of Supercomputing,2022,78(8):1712-1740. |
| 65 |
JIAZ Y,YUJ Q,AIX L,et al.Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm[J].Aerospace Science and Technology,2018,76,112-125.
doi: 10.1016/j.ast.2018.01.025 |
| 66 |
VIDALT,CRAINICT G,GENDREAUM,et al.Time-window relaxations in vehicle routing heuristics[J].Journal of Heuristics,2015,21(3):329-358.
doi: 10.1007/s10732-014-9273-y |
| 67 |
EVERSL,BARROSA I,MONSUURH,et al.Online stochastic UAV mission planning with time windows and time-sensitive targets[J].European Journal of Operational Research,2014,238(1):348-362.
doi: 10.1016/j.ejor.2014.03.014 |
| 68 |
CASBEERD,HOLSAPPLER.Column generation for a UAV assignment problem with precedence constraints[J].International Journal of Robust and Nonlinear Control,2011,21,1421-1433.
doi: 10.1002/rnc.1722 |
| 69 | XIONGJ,LIJ,LIJ,et al.Probability-tuned market-based allocations for UAV swarms under unreliable observations[J].IEEE Trans.on Cybernetics,2022,1-12. |
| 70 |
SUBRAMANYAMA,REPOUSSISP P,GOUNARISC E.Robust optimization of a broad class of heterogeneous vehicle routing problems under demand uncertainty[J].Informs Journal on Computing,2020,32(3):661-681.
doi: 10.1287/ijoc.2019.0923 |
| 71 |
ZHANGY,BALDACCIR,SIMM,et al.Routing optimization with time windows under uncertainty[J].Mathematical Programming,2019,175,263-305.
doi: 10.1007/s10107-018-1243-y |
| 72 | DULAIT,WERNER-STARKÁ,HANGOSK M.Algorithm for directing cooperative vehicles of a vehicle routing problem for improving fault-tolerance[J].Optimization and Engineering,2017,19(2):239-270. |
| 73 | PATEL R, RUDNICK-COHEN E, AZARM S H, et al. Robust multi-UAV route planning considering UAV failure[C]// Proc. of the International Conference on Unmanned Aircraft Systems, 2019: 205-212. |
| 74 |
CUIJ H,WEIR X,LIUZ C,et al.UAV motion strategies in uncertain dynamic environments: a path planning method based on Q-learning strategy[J].Applied Sciences,2018,8(11):2169.
doi: 10.3390/app8112169 |
| 75 | 张安,杨咪,毕文豪,等.基于多策略GWO算法的不确定环境下异构多无人机任务分配[J].航空学报,2023,44(8):327115. |
| ZHANGA,YANGM,BIW H,et al.Task allocation of heterogeneous multi-UAV in uncertain environment based on multiple strategies GWO[J].Acta Aeronautica et Astronautica Sinica,2023,44(8):327115. | |
| 76 |
WHITBROOKA,MENGQ,CHUNGP W H.Addressing robustness in time-critical, distributed, task allocation algorithms[J].Applied Intelligence,2019,49(1):1-15.
doi: 10.1007/s10489-018-1169-3 |
| 77 | CAMPBELL T, JOHNSON L, HOW J. Multiagent allocation of Markov decision process tasks[C]//Proc. of the American Control Conference, 2013: 2356-2361. |
| 78 | 孙昱,姚佩阳,孙鹏,等.基于鲁棒多目标优化的智能体群组协同任务规划[J].控制与决策,2016,31(11):2045-2052. |
| SUNY,YAOP Y,SUNP,et al.Cooperative task scheduling method for agent group using robust multiobjective optimization approach[J].Control and Decision,2016,31(11):2045-2052. | |
| 79 |
YANGM,ZHANGA,BIW H,et al.A resource-constrained distributed task allocation method based on a two-stage coalition formation methodology for multi-UAVs[J].The Journal of Supercomputing,2022,78(7):10025-10062.
doi: 10.1007/s11227-021-04223-3 |
| 80 | YANGM,BIW H,ZHANGA,et al.A distributed task reassignment method in dynamic environment for multi-UAV system[J].Applied Intelligence,2021,52(2):1582-1601. |
| 81 |
GAOK Z,YANGF J,ZHOUM C,et al.Flexible job-shop rescheduling for new job insertion by using discrete jaya algorithm[J].IEEE Trans.on Cybernetics,2019,49(5):1944-1955.
doi: 10.1109/TCYB.2018.2817240 |
| 82 | LIU J M, WANG Q, XU Y J, et al. A novel distributed method for time-critical task allocation problems in multi-UAV system[C]// Proc. of the IEEE International Conference on Communications, 2021. |
| 83 | XU G T, LI L, LONG T, et al. Cooperative multiple task assignment considering precedence constraints using multi-chromosome encoded genetic algorithm[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2018: 3336-3344. |
| 84 | SCHWARZROCKJ,ZACARIASI,BAZZANA L C,et al.Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence[J].Engineering Applications of Artificial Intelligence,2018,6,10-20. |
| 85 | 严飞,祝小平,周洲,等.考虑同时攻击约束的多异构无人机实时任务分配[J].中国科学: 信息科学,2019,49(5):555-569. |
| YANF,ZHUX P,ZHOUZ,et al.Real-time task allocation for a heterogeneous multi-UAV simultaneous attack[J].Scientia Sinica (Informationis),2019,49(5):555-569. | |
| 86 | CHENJ,XIAOK,YOUK,et al.Hierarchical task assignment strategy for heterogeneous multi-UAV system in large-scale search and rescue scenarios[J].International Journal of Aerospace Engineering,2021,(2):1-9. |
| 87 |
ATENCIAC R,SERJ D,CAMACHOD.Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning[J].Swarm and Evolutionary Computation,2019,44,480-495.
doi: 10.1016/j.swevo.2018.06.005 |
| 88 | SUBRAMANYAM A. Robust optimization of vehicle routing problems under uncertainty[D]. Pittsburgh: Carnegie Mellon University, 2018. |
| 89 | SUNDAR K, VENKATACHALAM S, MANYAM S G. Path planning for multiple heterogeneous unmanned vehicles with uncertain service times[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2017: 480-487. |
| 90 |
WOLEKA,CHENGS,GOSWAMID,et al.Cooperative mapping and target search over an unknown occupancy graph using mutual information[J].IEEE Robotics and Automation Letters,2020,5(2):1071-1078.
doi: 10.1109/LRA.2020.2966394 |
| 91 | LUITPOLDB.Coordinated target assignment and UAV path planning with timing constraints[J].Journal of Intelligent & Robotic Systems,2019,94(3):857-869. |
| 92 | XIAC,LIUY T,YINL Y,et al.Cooperative task assignment and track planning for multi-UAV attack mobile targets[J].Journal of Intelligent & Robotic Systems,2020,100(3):1383-1400. |
| 93 |
ZHENZ Y,GAOC,ZHENGF Y,et al.Cooperative path replanning method for multiple unmanned aerial vehicles with obstacle collision avoidance under timing constraints[J].Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2015,229(10):1813-1823.
doi: 10.1177/0954410014561703 |
| 94 | HUJ W,WANGM,ZHAOC H,et al.Formation control and collision avoidance for multi-UAV systems based on Voronoi partition[J].Science China Technological Sciences,2019,63(1):65-72. |
| 95 |
FUZ J,MAOY H,HED J,et al.Secure multi-UAV collaborative task allocation[J].IEEE Access,2019,7,35579-35587.
doi: 10.1109/ACCESS.2019.2902221 |
| 96 |
ZHENZ Y,XINGD J,GAOC.Cooperative search-attack mission planning for multi-UAV based on intelligent self-orga-nized algorithm[J].Aerospace Science and Technology,2018,76,402-411.
doi: 10.1016/j.ast.2018.01.035 |
| 97 |
YANF,ZHUX P,ZHOUZ,et al.A hierarchical mission planning method for simultaneous arrival of multi-UAV coalition[J].Applied Sciences,2019,9(10):1986.
doi: 10.3390/app9101986 |
| 98 | 徐广通,王祝,曹严,等.动态优先级解耦的无人机集群轨迹分布式序列凸规划[J].航空学报,2022,43(2):415-426. |
| XUG T,WANGZ,CAOY,et al.Dynamic priority decoupled UAV swarm trajectory planning using distributed sequential convex programming[J].Acta Aeronautica et Astronautica Sinica,2022,43(2):415-426. | |
| 99 | ALIGHANBARI M, HOW J P. Cooperative task assignment of unmanned aerial vehicles in adversarial environments[C]//Proc. of the American Control Conference, 2005: 4661-4666. |
| 100 |
COHENI,EPSTEINC,ISAIAHP,et al.Discretization-based and look-ahead algorithms for the dubins traveling salesperson problem[J].IEEE Trans.on Automation Science and Engineering,2017,14(1):383-390.
doi: 10.1109/TASE.2016.2602385 |
| 101 | 黄楠. 复杂多行程车辆路径问题的精确算法研究[D]. 武汉: 华中科技大学, 2021. |
| HUANG N. A dissertation submitted in partial fulfillment of the requireme[D]. Wuhan: Huazhong University of Science & Technology, 2021. | |
| 102 |
MARÍNA.Exact and heuristic solutions for the minimum number of branch vertices spanning tree problem[J].European Journal of Operational Research,2015,245(3):680-689.
doi: 10.1016/j.ejor.2015.04.011 |
| 103 |
KOCC,BEKTAST,JABALIO,et al.A hybrid evolutio-nary algorithm for heterogeneous fleet vehicle routing problems with time windows[J].Computers & Operations Research,2015,64,11-27.
doi: 10.3969/j.issn.1001-3695.2015.01.003 |
| 104 |
PENNAP H V,SUBRAMANIANA,OCHIL S.An iterated local search heuristic for the heterogeneous fleet vehicle routing problem[J].Journal of Heuristics,2013,19(2):201-232.
doi: 10.1007/s10732-011-9186-y |
| 105 |
CHOIH L,BRUNETL,HOWJ P.Consensus-based decentralized auctions for robust task allocation[J].IEEE Trans.on Robotics,2009,25(4):912-926.
doi: 10.1109/TRO.2009.2022423 |
| 106 |
ZHAOW Q,MENGQ G,CHUNGP W H.A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario[J].IEEE Trans.on Cybernetics,2016,46(4):902-915.
doi: 10.1109/TCYB.2015.2418052 |
| [1] | Qidi WEN, Zhiyu KANG, Guoning WEI, Yanbo HE, Bin WU, Ruiyi ZHOU. Research on the approach observation mission flow planning method of parent-child spacecraft [J]. Systems Engineering and Electronics, 2023, 45(12): 3941-3948. |
| [2] | Zenan ZHONG, Shenming QUAN, Tao CHAO, Songyan WANG, Ming YANG. An active space debris removal mission planning method [J]. Systems Engineering and Electronics, 2023, 45(12): 3958-3966. |
| [3] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [4] | Peng JIN, Kang LI. Distributed satellite resource scheduling based on improved contract network protocol [J]. Systems Engineering and Electronics, 2022, 44(10): 3164-3173. |
| [5] | Shengyu ZHANG, Yukun SUN, Zhencai ZHU, Haiying HU. Heuristic optimized forward-backward chains combination method for on-board multi-targets observation planning [J]. Systems Engineering and Electronics, 2021, 43(5): 1262-1269. |
| [6] | Kai CHENG, Gang CHEN, Xiaohan YU, Man LIU, Tianhao SHAO. Knowledge traction and data-driven wargame AI design and key technologies [J]. Systems Engineering and Electronics, 2021, 43(10): 2911-2917. |
| [7] | Gaowei JIA, Jianfeng WANG. Research review of UAV swarm mission planning method [J]. Systems Engineering and Electronics, 2021, 43(1): 99-111. |
| [8] | JIN Peng, WANG Chaochao, XIA Wei, YANG Bin, TANG Hang. Two phase emergency mission planning with satellite instruction release [J]. Systems Engineering and Electronics, 2019, 41(4): 810-818. |
| [9] | ZHANG Chao, JIN Peng, CHEN Jinyong, LI Yanbin, MA Wanquan. Virtual constellation task planning technology for emergency observation [J]. Systems Engineering and Electronics, 2019, 41(4): 819-825. |
| [10] | HE Yongming, CHEN Yingwu, XING Lining, YUAN Zang, LI Guoliang. Autonomous mission planning system design for novel imaging satellite [J]. Systems Engineering and Electronics, 2017, 39(4): 806-813. |
| [11] | NI Peng1,2, LIU Jinmang1, FU Qiang1, GAO Jiale1. #br# Research on layered decisionmaking of multisensor planning based onheterogeneous MAS in antiTBM combat [J]. Systems Engineering and Electronics, 2016, 38(8): 1816-1825. |
| [12] | HE Lei, LIU Xiao-lu, CHEN Ying-wu, XING Li-ning. Cloud modeling and processing method for agile observing satellite mission planning [J]. Systems Engineering and Electronics, 2016, 38(4): 852-858. |
| [13] | ZHANG Jia-ming, LIU Zhong, SHI Jian-mai, HE Yun-yue. Schedule of multiple satellite launch missions in multiple launch centers considering failures [J]. Systems Engineering and Electronics, 2015, 37(8): 1803-1809. |
| [14] | HU Xiao-xuan, ZHU Wai-ming, MA Hua-wei. Method of satellite and aerostat cooperative reconnaissance mission planning [J]. Systems Engineering and Electronics, 2015, 37(7): 1562-1568. |
| [15] | WANG Hui-lin, HUANG Xiao-jun, MA Man-hao, QIU Di-shan. Mission scheduling technique for electronic reconnaissance satellites [J]. Journal of Systems Engineering and Electronics, 2010, 32(8): 1695-1699. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||