Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (9): 2860-2865.doi: 10.12305/j.issn.1001-506X.2023.09.25
• Guidance, Navigation and Control • Previous Articles Next Articles
MPOS federated real-time integration method
Jianli LI, Mengdi WEI, Qipeng WANG, Wu ZHANG
- School of Instrumentaton and Optoelectronic Engineering, Beihang University, Beijing 100191, China
-
Received:2022-05-28Online:2023-08-30Published:2023-09-05 -
Contact:Mengdi WEI
CLC Number:
Cite this article
Jianli LI, Mengdi WEI, Qipeng WANG, Wu ZHANG. MPOS federated real-time integration method[J]. Systems Engineering and Electronics, 2023, 45(9): 2860-2865.
share this article

Fig.1
MPOS hardware platform"

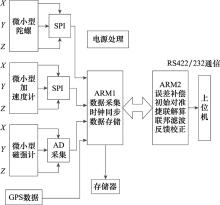
Fig.2
MPOS work flow chart"

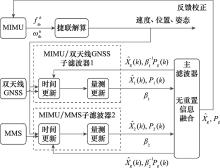
Fig.3
Flow chart of MPOS federated real-time integration algorithm"


Fig.4
Actual installation diagram of the experiment"


Fig.5
Experimental trajectory diagram"


Fig.6
Position error diagram"


Fig.7
Velocity error diagram"

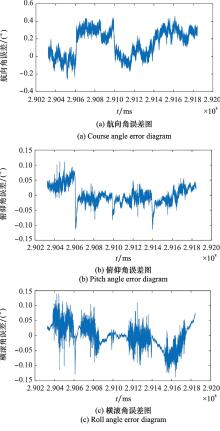
Fig.8
Attitude error diagram"

Table 1
STD precision statistical results of position, speed and attitude"
| 产品 | 位置精度/m | 速度精度/(m/s) | 姿态精度/(°) | ||||||||
| 纬度 | 经度 | 高度 | 东向 | 北向 | 天向 | 航向角 | 俯仰角 | 横滚角 | |||
| 本文 | 0.1 | 0.6 | 0.4 | 0.03 | 0.03 | 0.02 | 0.15 | 0.03 | 0.04 | ||
| APX-15 | 1.5 | 1.5 | 1.5 | 0.05 | 0.05 | 0.05 | 0.3 | 0.04 | 0.04 | ||
| 1 |
EDGAR L V , REIMER C , SCHNEIDER T , et al. INS/GNSS integration for aerobatic flight applications and aircraft motion surveying[J]. Sensors, 2017, 17 (5): 941.
doi: 10.3390/s17050941 |
| 2 |
GAUTAM D , LUCIEER A , MALENOVSKY Z , et al. Comparison of MEMS-based and FOG-based IMUs to determine sensor pose on an unmanned aircraft system[J]. Journal of Surveying Engineering, 2017, 143 (4): 04017009.
doi: 10.1061/(ASCE)SU.1943-5428.0000225 |
| 3 | LU W F. Information fusion algorithm of GNSS/INS integrated navigation system[C]//Proc. of the International Conference on Intelligent Computing and Signal Processing, 2020. |
| 4 | PEI Y F, GAO S S, HU G, et al. Mahalanobis distance based adaptive unscented Kalman filter and its application in GPS/MEMS-IMU integration[C]//Proc. of the IEEE 3rd Advanced Information Management, Networking, Electronic and Automation Control Conference, 2019: 2649-2655. |
| 5 |
张晶宇, 李涛, 吴美平. MIMU/GPS/强磁计组合导航系统序贯抗差自适应滤波器设计[J]. 导航与控制, 2012, 11 (1): 10- 14.
doi: 10.3969/j.issn.1674-5558.2012.01.003 |
|
ZHANG J Y , LI T , WU M P . MIMU/GPS/magnetometer integrated navigation system sequential robustly adaptive filter design[J]. Navigation and Control, 2012, 11 (1): 10- 14.
doi: 10.3969/j.issn.1674-5558.2012.01.003 |
|
| 6 | PENG S, XUAN X. The algorithm of MIMU/odometer integrated navigation system aided by nonholonomic constraints[C]//Proc. of the IEEE International Conference on Mechatronic Sciences, Electric Engineering and Computer, 2014: 452-455. |
| 7 | XIAO R Z , XIANG X , YAO Y Q , et al. A robust quaternion Kalman filter method for MIMU/GPS in-motion alignment[J]. IEEE Trans. on Instrumentation and Measurement, 2021, 70, 8503109. |
| 8 | TAO G L, ZHANG X H, LIU W Q. Robust centralized fusion Kalman predictor for networked multisensor systems with packet dropouts and uncertain-variance linearly correlated white noises[C]//Proc. of the 39th Chinese Control Conference, 2020: 2894-2901. |
| 9 |
LIN X , LI W , LI S D , et al. Combined adaptive robust Kalman filter algorithm[J]. Measurement Science and Technology, 2021, 32 (7): 075015.
doi: 10.1088/1361-6501/abf57c |
| 10 | WANG D J, ZHANG L, WU J, et al. Research on the real-time information fusion algorithm for GNSS/MIMU integrated navigation system[C]//Proc. of the Chinese Guidance, Navigation and Control Conference, 2015: 2028-2033. |
| 11 | AGUILA R C , CARAZO A H , PÉREZ J . Centralized filtering and smoothing algorithms from outputs with random parameter matrices transmitted through uncertain communication channel[J]. Digital Signal Processing, 2018, 85 (1): 77- 85. |
| 12 | 张亚文, 莫明岗, 马小艳, 等. 一种基于集中滤波的SINS/DVL/USBL水下组合导航算法[J]. 导航定位与授时, 2017, 4 (1): 25- 31. |
| ZHANG Y W , MO M G , MA X Y , et al. An integrated SINS/DVL/USBL underwater navigation algorithm based on integrated filtering[J]. Navigation, Positioning and Timing, 2017, 4 (1): 25- 31. | |
| 13 | HE X F, HE R G, FAN C, et al. A MIMU/GNSS/magnetometer/polarized light integrated compass algorithm[C]//Proc. of the IEEE International Symposium on Inertial Sensors and Systems, 2020. |
| 14 | WANG Q Y , CUN X F , LI Y B , et al. Performance enhancement of a USV INS/CNS/DVL integration navigation system based on an adaptive information sharing factor federated filter[J]. Sensors, 2012, 17 (2): 239. |
| 15 | LAI X, YANG F X. A robust Kalman filter for SINS/GPS integrated navigation[C]//Proc. of the IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference, 2021: 238-248. |
| 16 | 崔展博, 景博, 焦晓璇, 等. 基于联邦卡尔曼滤波器的容错组合导航系统设计[J]. 电子测量与仪器学报, 2021, 35 (11): 143- 153. |
| CUI Z B , JING B , JIAO X X , et al. Design of fault-tolerant integrated navigation system based on federated Kalman filter[J]. Journal of Electronic Measurement and Instrumentation, 2021, 35 (11): 143- 153. | |
| 17 | LIU C, CHENG S, LI K D. Position and speed measuring method of maglev train based on federal Kalman filter and information fusion[C]//Proc. of the IOP Computer Science and Communication Technology, 2020. |
| 18 |
LIU Y , ZHANG Z M , GAO S B , et al. A mixed target estimation fusion algorithm based on Gibbs-GLMB and federated filter[J]. IET Cyber-systems and Robotics, 2022, 4 (1): 61- 75.
doi: 10.1049/csy2.12044 |
| 19 | 顾涛, 陈帅, 谭聚豪, 等. 基于联邦滤波的SINS/GNSS/OD/高度计多源组合导航算法研究[J]. 导航定位与授时, 2021, 8 (3): 20- 26. |
| GU T , CHEN S , TAN J H , et al. SINS/GNSS/OD/altimeter multi-source integrated navigation algorithm based on federated filtering[J]. Navigation, Positioning and Timing, 2021, 8 (3): 20- 26. | |
| 20 | WANG Q , CHENG M , NOURELDIN A , et al. Research on the improved method for dual foot-mounted inertial magneto-meter pedestrian positioning based on adaptive inequality constraints Kalman filter algorithm[J]. Measurement, 2019, 135 (1): 189- 198. |
| 21 | TIAN J , WANG C. Y , LU X Y , et al. Analysis of a federal Kalman flterbased tracking loop for GPS signals[J]. Springer Verlag, 2019, 23 (4): 119. |
| 22 | ZHANG H M , ZHANG H Q , XU G Y , et al. Attitude anti-interference federal filtering algorithm for MEMS-SINS/GPS/magneto-meter/SV integrated navigation system[J]. Measurement and Control, 2020, 53 (10): 46- 60. |
| 23 | HU Z T , LIU J , YANG Y N . Federal extended Kalman filter based on reconstructed observation in incomplete observations[J]. High Technology Letters, 2018, 24 (3): 241- 248. |
| 24 | WANG W Q , ZHAO B H , ZHANG W , et al. Simulation experiment and analysis of GNSS/INS/LEO/5G integrated navigation based on federated filtering algorithm[J]. Sensors, 2022, 22 (2): 550. |
| 25 | WANG X B, SHI S M. Estimation of vehicle turning radius based on federal Kalman filter[C]//Proc. of the International Conference on Intelligent Computation Technology and Automation, 2010: 224-227. |
| 26 | XU Y B, XU K, WAN J W, et al. Research on particle filter tracking method based on Kalman filter[C]//Proc. of the Advanced Information Management, Communicates, Electronic and Automation Control Conference, 2018: 1564-1568. |
| 27 | 杨波, 单斌, 王跃钢, 等. 航向信息辅助的MIMU/GPS高精度组合导航方法[J]. 中国惯性技术学报, 2018, 26 (5): 643- 648. |
| YANG B , SHAN B , WANG Y G , et al. High precision MIMU/GPS integrated navigation assisted by heading information[J]. Journal of Chinese Inertial Technology, 2018, 26 (5): 643- 648. | |
| 28 | LIAO J , WANG Y , YIN J N , et al. An integrated navigation method based on an adaptive federal Kalman filter for a rice transplanter[J]. American Society of Agricultural and Biological Engineers, 2021, 64 (2): 389- 399. |
| 29 | XIAO X, LIU J X. Adaptive fault-tolerant federated filter with fault detection method based on combination of LSTM and chi-square test[C]//Proc. of the IEEE 40th Chinese Control Conference, 2021: 3059-3064. |
| 30 | FILHO J O A , FORTALEZA E L F , SILVA J G , et al. Adaptive Kalman filtering for closed-loop systems based on the obser-vation vector covariance[J]. International Journal of Control, 2021, 8 (2): 1731- 1746. |
| 31 | YAN J, DU X, LI H. Research on MIMU online calibration method based on multi-information source[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2019: 619-703. |
| [1] | Lin CHEN, Yundi JIN, Jie HUANG, Jingran LIN, Yaqian ZHANG. Acquisition algorithm for BOC navigation signals based on sub-peak superposition [J]. Systems Engineering and Electronics, 2023, 45(7): 2211-2219. |
| [2] | Deying YU, Houpu LI, Bing JI, Shaofeng BIAN. Fast satellite selection method based on grey wolf optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(5): 1489-1495. |
| [3] | Zukun LU, Haiyu GUO, Jie SONG, Yifan SUN, Baiyu LI. Optimal front-end gain of anti-jamming satellite navigation receiver [J]. Systems Engineering and Electronics, 2022, 44(7): 2270-2275. |
| [4] | Dong FU, Jing PENG, Ming MA, Feiqiang CHEN, Gang OU. GNSS time spoofing detection and discrimination based on clock bias hypothesis test [J]. Systems Engineering and Electronics, 2022, 44(3): 948-955. |
| [5] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [6] | Rui LIU, Zhiwei YANG, Qidong CHEN, Guisheng LIAO, Weimin ZHEN. Centroid localization method of GNSS jamming source based on signal propagation correction [J]. Systems Engineering and Electronics, 2021, 43(8): 2083-2089. |
| [7] | Qiuying WANG, Kaiyue LIU, Juan YIN. Research on error estimation of micro-gyroscope and location method based on BPNN for vehicle during GNSS outages [J]. Systems Engineering and Electronics, 2020, 42(5): 1139-1145. |
| [8] | Haiyang WANG, Zhicheng YAO, Zhiliang FAN, Jinying WU, Guangbin LIU. Anti-jamming algorithm for GNSS receivers with array antenna in high speed environment [J]. Systems Engineering and Electronics, 2020, 42(11): 2409-2417. |
| [9] | Dan LIU, Xiaozhou YE, Wei XIAO, Wenxiang LIU, Feixue WANG. Efficient simulation algorithm for the influence of terrain occlusion on the GNSS interference range [J]. Systems Engineering and Electronics, 2020, 42(11): 2418-2425. |
| [10] | Yuqing FAN, Erwei CHENG, Ming WEI, Qinglong ZHANG, Yazhou CHEN. Analysis of damage effect of high-power microwave bomb on GNSS receiver [J]. Systems Engineering and Electronics, 2020, 42(1): 37-44. |
| [11] | WANG Jianing, LIAN Baowang, ZHANG Miaomiao. GNSS signal acquisition method based on ZF frequency error correction [J]. Systems Engineering and Electronics, 2019, 41(4): 701-707. |
| [12] | . Optimization and analysis of GNSS dual frequency sum diff joint tracking algorithm based on CNR model weighting [J]. Systems Engineering and Electronics, 2019, 41(4): 708-715. |
| [13] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [14] | LI Wengang, WANG Yiwei, CHEN Rui, LIU Meng. Antimultipath dualestimate loop method for BOC modulated signals [J]. Systems Engineering and Electronics, 2018, 40(5): 1118-1123. |
| [15] | WANG Ershen, ZHANG Qing, QU Pingping, LAN Xiaoyu, PANG Tao, JIANG Yi. GNSS constellation availability evaluation method based on Markov chain [J]. Systems Engineering and Electronics, 2017, 39(4): 814-820. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||