Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (12): 3995-4004.doi: 10.12305/j.issn.1001-506X.2023.12.30
• Guidance, Navigation and Control • Previous Articles
3D UAV trajectory planning based on optimized A* and MPC fusion algorithm
Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG
- School of Electronics and Information, Northwestern Polytechnical University, Xi'an 710072, China
-
Received:2022-09-05Online:2023-11-25Published:2023-12-05 -
Contact:Bo LI
CLC Number:
Cite this article
Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm[J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004.
share this article
Fig.1
Schematic diagram of static obstacle"

Fig.2
Schematic diagram of sudden obstacle"
Fig.3
Schematic diagram of unmanned aerial vehicle anti-collision spherical safety zone"
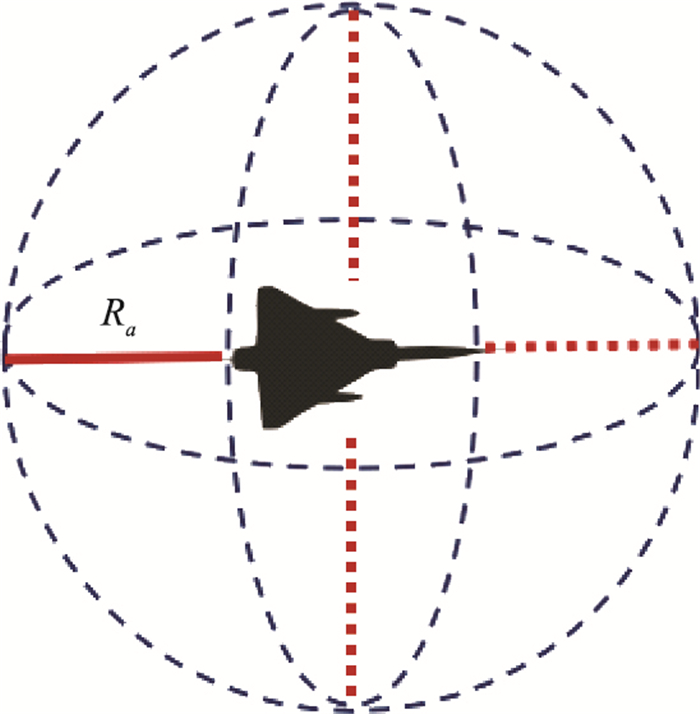
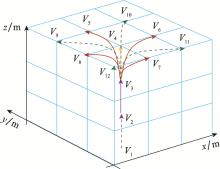
Fig.4
Schematic diagram of scalable nodes in 3D space"

Fig.5
Schematic diagram of unmanned aerial vehicle trajectory continuous curve optimization"
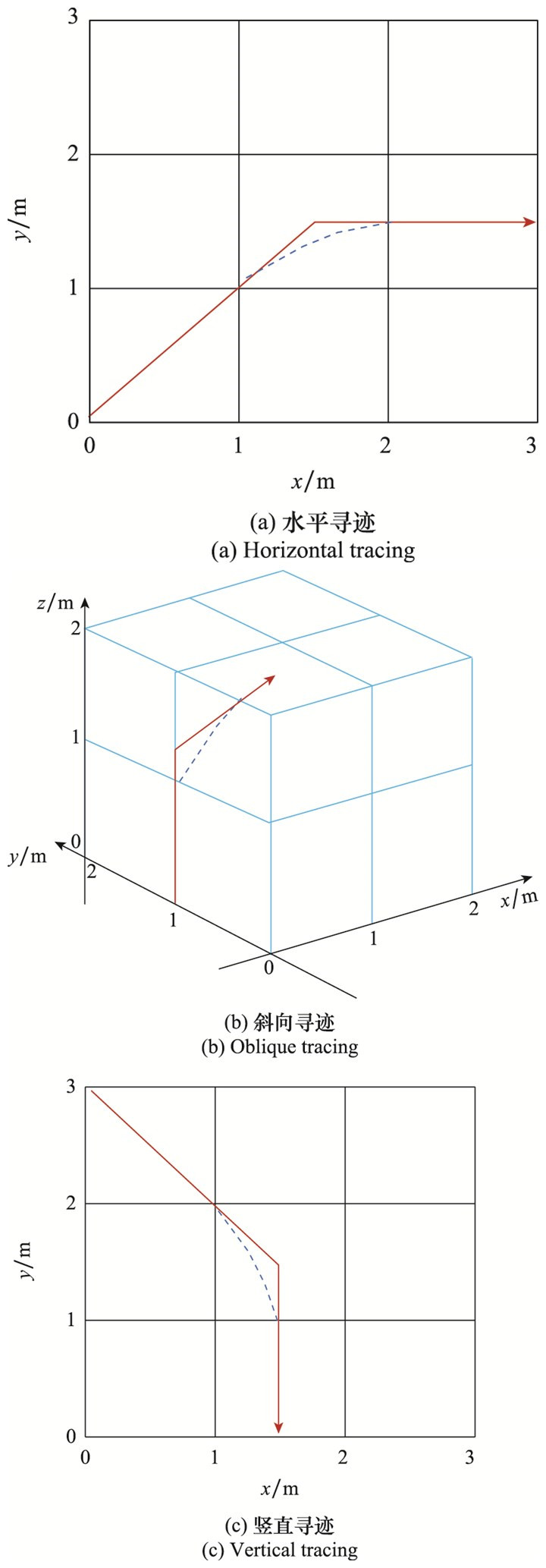
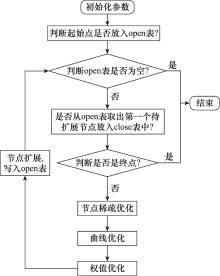
Fig.6
Flowchart of optimized A* algorithm"
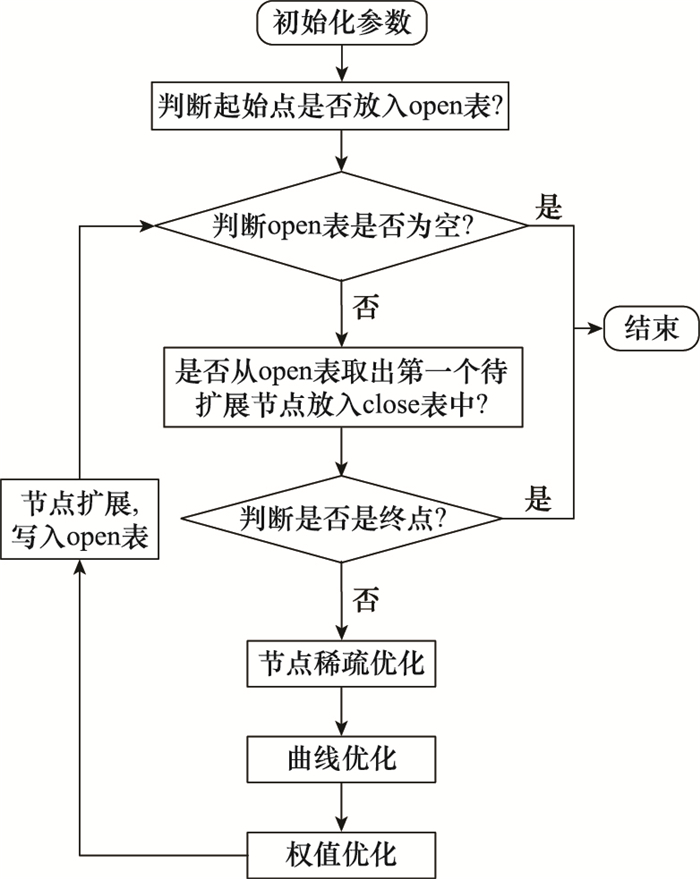
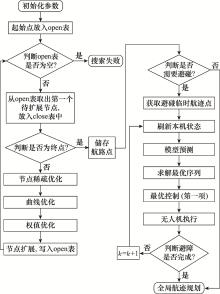
Fig.7
Flowchart of unmanned aerial vehicle trajectory planning based on fusion algorithm"
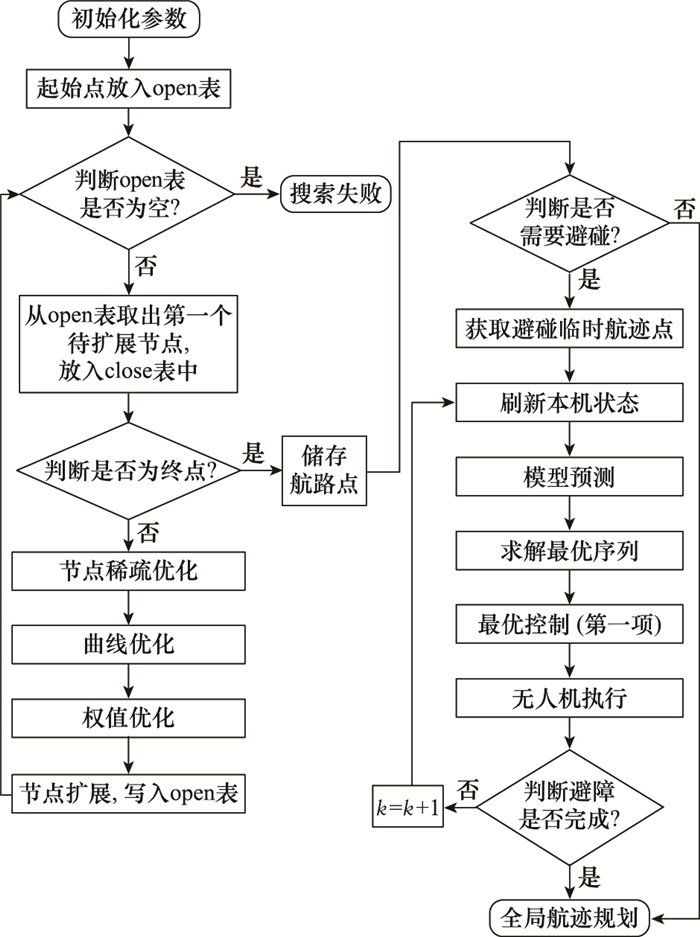
Table 1
Initialization of system parameters"
| 参数 | 数值 |
| 无人机起始位置/m | (0, 0, 0) |
| 无人机速度/(m·s-1) | 25 |
| 目标位置/m | (380, 450, 415) |
| 最大偏航角/(°) | 45 |
| 最大俯仰角/(°) | 45 |
| 最小转弯半径/m | 10 |
| 权值因子a | 0.85 |
| 权值因子b | 0.15 |
| 状态量个数 | 3 |
| 控制量个数 | 2 |
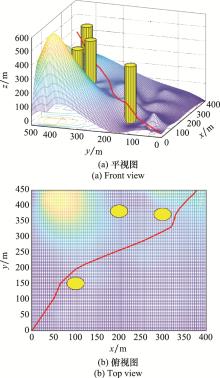
Fig.8
Unmanned aerial vehicle trajectory planning based on traditional A* algorithm"
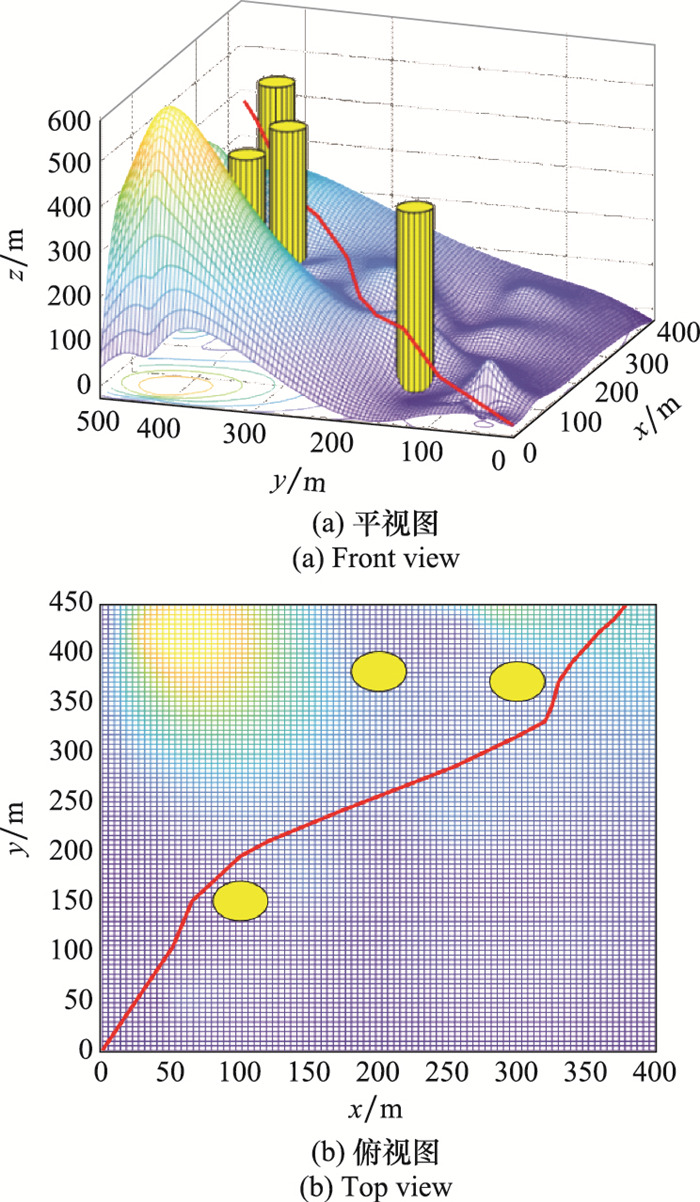
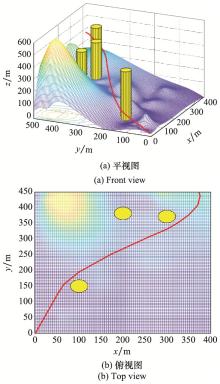
Fig.9
Unmanned aerial vehicle trajectory planning based on sparse A* algorithm"
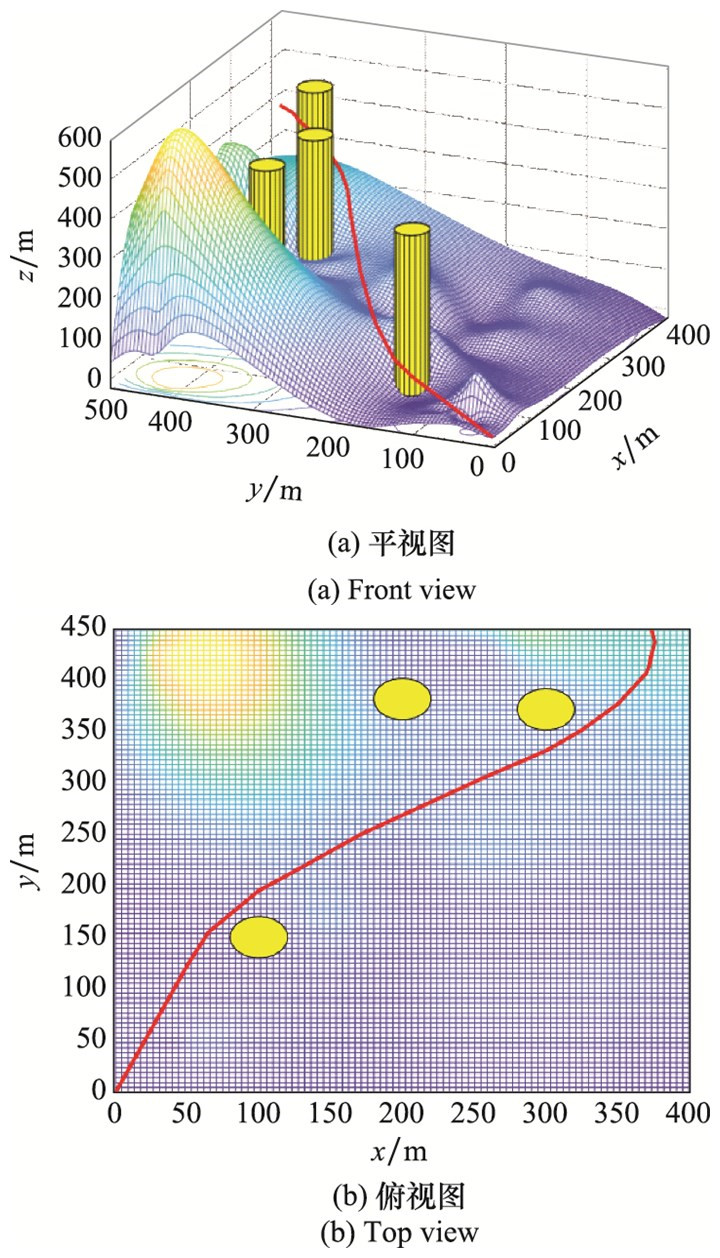
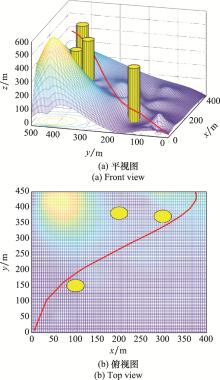
Fig.10
Unmanned aerial vehicle trajectory planning based on optimized A* algorithm"
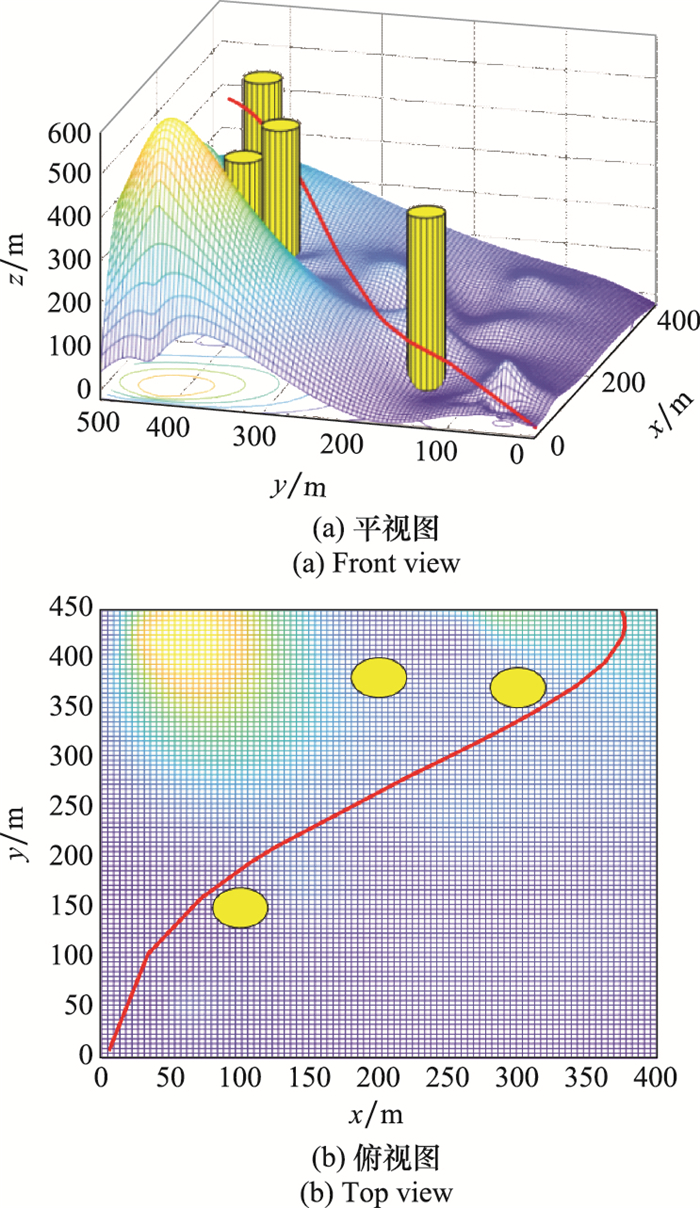
Table 2
Comparison of unmanned aerial vehicle trajectory planning data based on A* algorithm"
| 类型 | 节点数量/个 | 规划时间/s | 航程/m |
| 传统A*算法 | 50 | 2.78 | 1 125 |
| 稀疏A*算法 | 39 | 2.45 | 1 105 |
| 优化A*算法 | 36 | 2.35 | 1 044 |
Table 3
Information of sudden obstacle 1"
| 序号 | 位置坐标/m | 半径/m |
| 1 | (210, 280, 175) | 50 |

Fig.11
Contrast experiment of optimized A* algorithm and fusion algorithm for unmanned aerial vehicle trajectory planning"

Table 4
Sudden obstacle 2 information m"
| 序号 | 位置坐标 | 半径 |
| 1 | (240, 235, 160) | 50 |

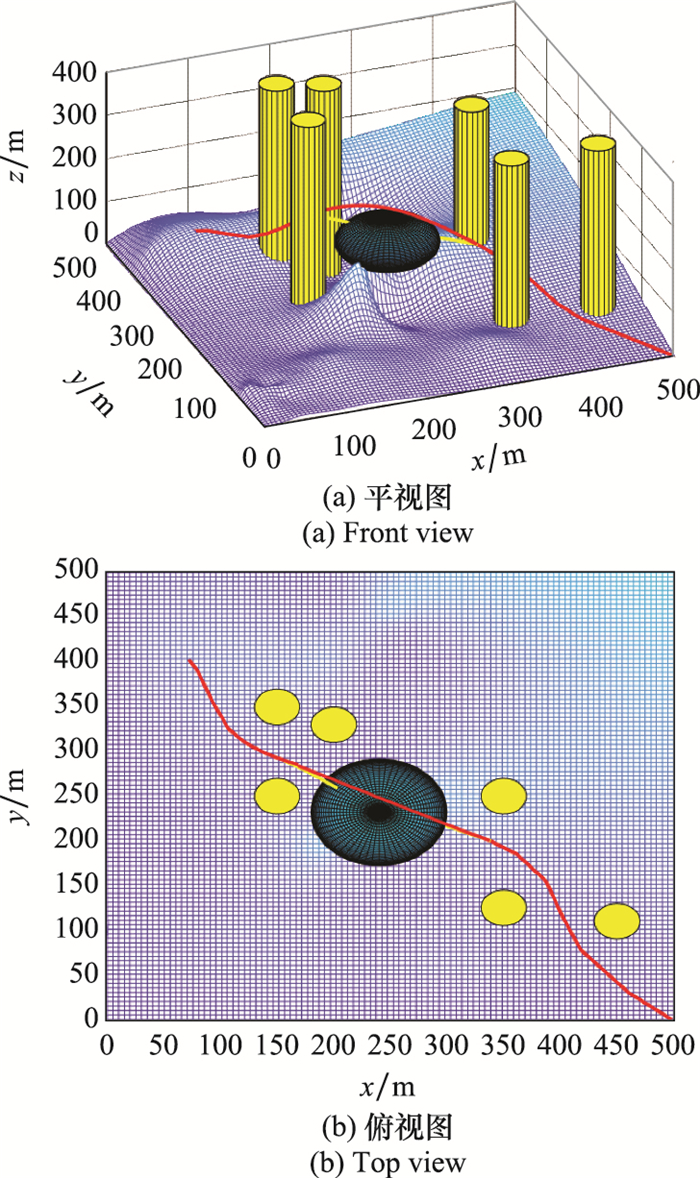
Fig.12
Comparative experiments on unmanned aerial vehicle obstacle avoidance trajectory planning based on optimized A* algorithm and fusion algorithm in complex environment"
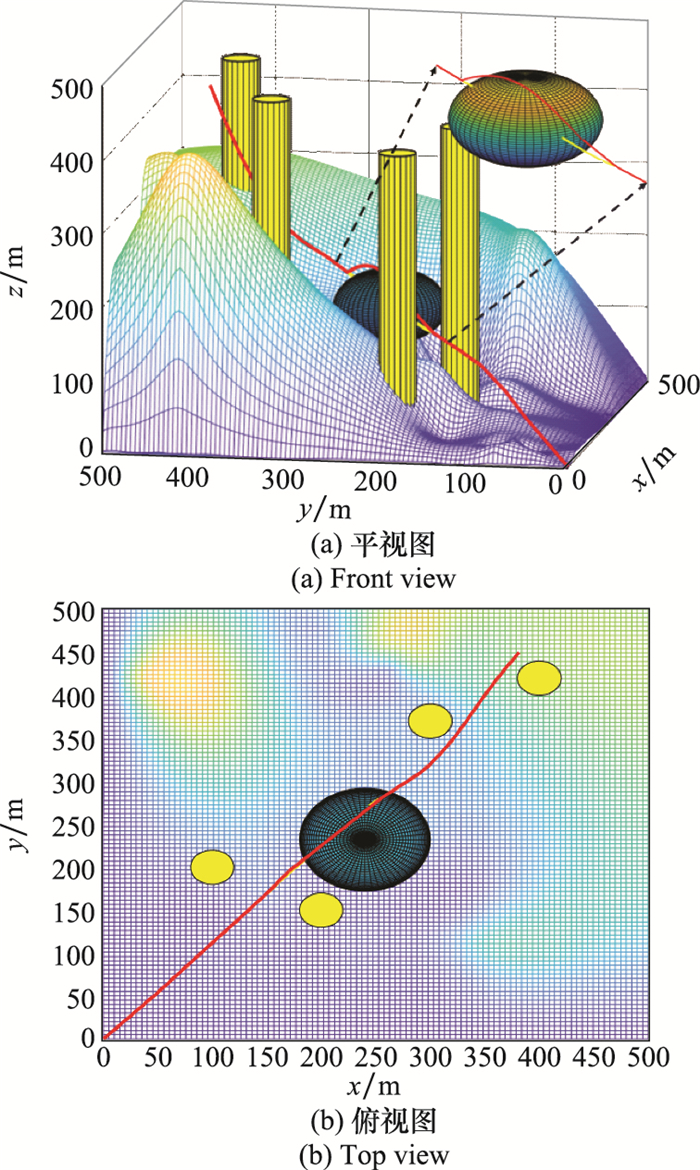
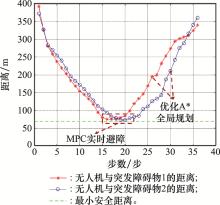
Fig.13
Real-time distance between unmanned aerial vehicle and sudden obstacles based on fusion algorithm"
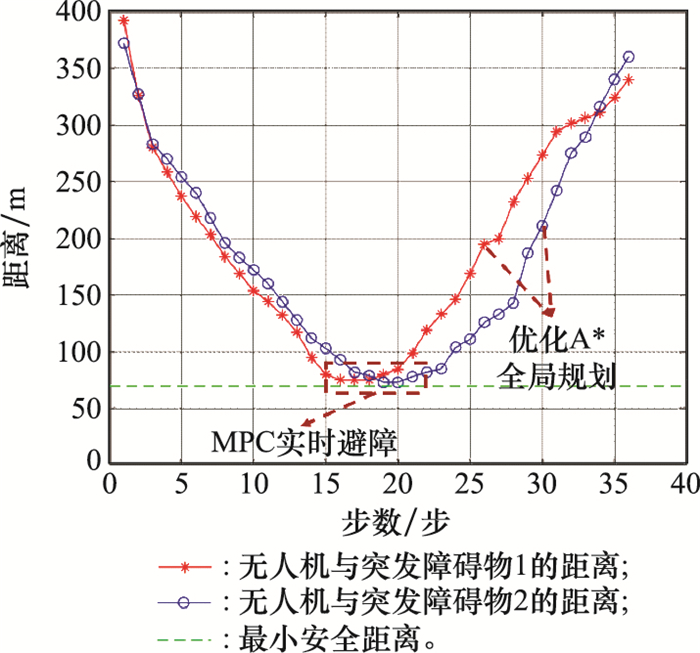
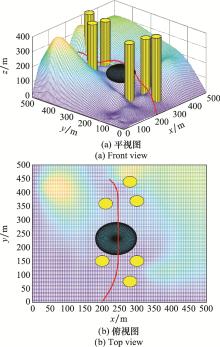
Fig.14
Unmanned aerial vehicle obstacle avoidance trajectory planning in complex environment based on variable target points"
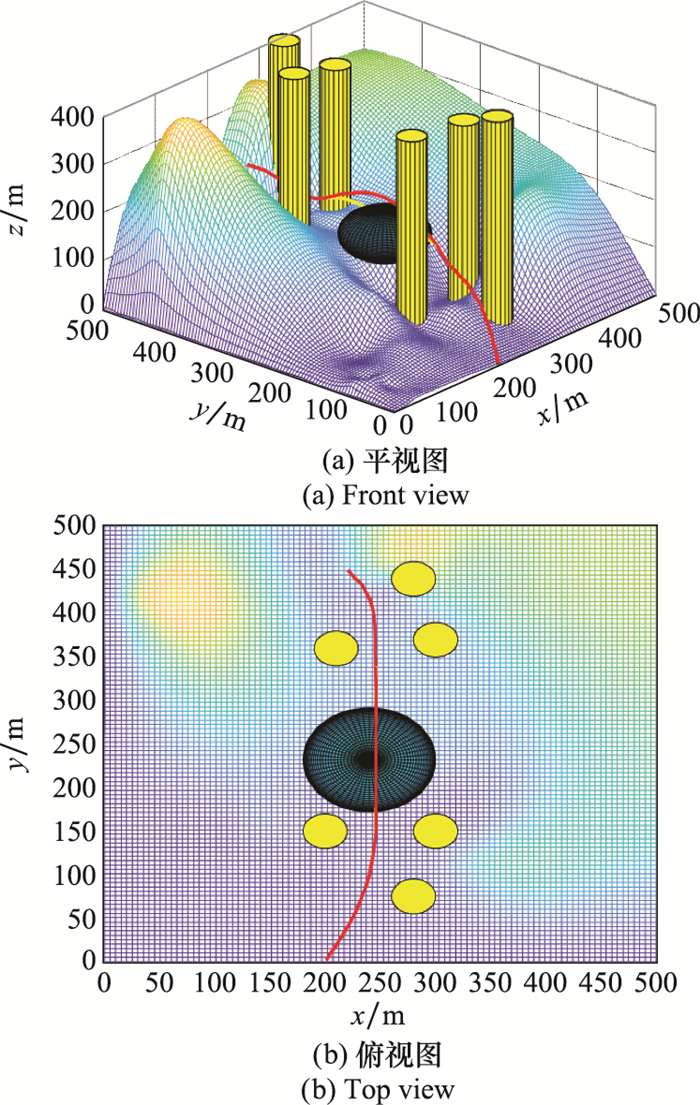
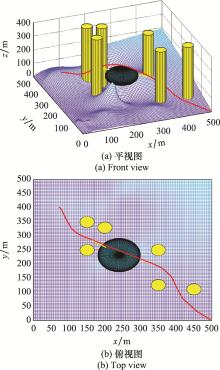
Fig.15
Unmanned aerial vehicle obstacle avoidance trajectory planning based on complex changing environment"
| 1 | SONG R, LONG T, WANG Z, et al. Multi-UAV cooperative target tracking method using sparse a search and standoff tracking algorithms[C]//Proc. of the IEEE CSAA Guidance, Navigation and Control Conference, 2018. DOI: 10.1109/GNCC42960.2018.9019171. |
| 2 | SONG Y J, XING X J, XI Q B, et al. Route planning method for UAV in unknown environment based on improved SAS algorithm[C]//Proc. of the Chinese Control and Decision Confe-rence, 2020: 3163-3168. |
| 3 |
SHAO S K , SHI W L , ZHAO Y J , et al. A new method of solving UAV trajectory planning under obstacles and multi-constraint[J]. IEEE Access, 2021, 9, 161161- 161180.
doi: 10.1109/ACCESS.2021.3132650 |
| 4 | ZHANG C J, MENG X Y. Spare A* search approach for UAV route planning[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2017: 413-417. |
| 5 | 绳红强, 黄海英, 崔毅刚. 基于A*蚁群融合算法的避障路径规划研究[J]. 机电工程技术, 2022, 51 (7): 45- 49. |
| SHENG H Q , HUANG H Y , CUI Y G . Research on obstacle avoidance path planning based on A* ant colony fusion algorithm[J]. Mechatronic Engineering Technology, 2022, 51 (7): 45- 49. | |
| 6 |
NIU Z J , JIA X H , YAO W . Communication free MPC based neighbors trajectory prediction for distributed multi-UAV motion planning[J]. IEEE Access, 2022, 10, 13481- 13489.
doi: 10.1109/ACCESS.2022.3148145 |
| 7 | CAO Y, LONG T, WANG Z, et al. Aircraft route planning for stealth penetration based on sparse A* search[C]//Proc. of the 29th Chinese Control and Decision Conference, 2017: 5380-5385. |
| 8 | 薄宁, 李相民, 代进进, 等. 基于变步长稀疏A*搜索和MPC的多无人机层次化协同航迹规划[J]. 指挥控制与仿真, 2018, 40 (2): 65- 71. |
| BO N , LI X M , DAI J J , et al. Hierarchical cooperative multi-UAV track planning based on variable-step sparse A* search and MPC[J]. Command, Control and Simulation, 2018, 40 (2): 65- 71. | |
| 9 | 张志文, 张鹏, 毛虎平, 等. 改进A*算法的机器人路径规划研究[J]. 电光与控制, 2021, 28 (4): 21- 25. |
| ZHANG Z W , ZHANG P , MAO H P , et al. Research on improved A* algorithm for robot path planning[J]. Electronics Optics & Control, 2021, 28 (4): 21- 25. | |
| 10 | WANG Z, LIU L, LONG T, et al. Enhanced sparse A* search for UAV path planning using dubins path estimation[C]//Proc. of the 33rd Chinese Control Conference, 2014: 738-742. |
| 11 |
KIM D J , JEONG Y W , CHUNG C C . Lateral vehicle trajectory planning using a model predictive control scheme for an automated perpendicular parking system[J]. IEEE Trans.on Industrial Electronics, 2023, 70 (2): 1820- 1829.
doi: 10.1109/TIE.2022.3163567 |
| 12 | 张阳伟, 乔越, 李成凤. 基于四叉树栅格环境的变步长双向A*算法[J]. 控制工程, 2021, 28 (10): 1960- 1966. |
| ZHANG Y W , QIAO Y , LI C F . A variable-step bidirectional A* algorithm based on a quadtree raster environment[J]. Control Engineering of China, 2021, 28 (10): 1960- 1966. | |
| 13 | 张浩杰, 张玉东, 梁荣敏, 等. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45 (2): 513- 520. |
| ZHANG H J , ZHANG Y D , LIANG R M , et al. Improved A* algorithm for optimal path planning method for robot energy consumption[J]. Systems Engineering and Electronics, 2023, 45 (2): 513- 520. | |
| 14 | VEKSLER A , JOHANSEN T A , BORRELLI F , et al. Dynamic positioning with model predictive control[J]. IEEE Trans.on Control Systems Technology, 2016, 24 (4): 1340- 1353. |
| 15 | MAXIM A, CARUNTU C F, LAZAR C. Cruise and headway control for vehicle platooning using a distributed model predictive control algorithm[C]//Proc. of the 21st International Conference on System Theory, Control and Computing, 2017: 146-151. |
| 16 | MERABTI H, BOUCHACHI I, BELARBI K. Nonlinear model predictive control of quadcopter[C]//Proc. of the 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, 2015: 208-211. |
| 17 | 李晓辉, 苗苗, 冉保健, 等. 基于改进A*算法的无人机避障路径规划[J]. 计算机系统应用, 2021, 30 (2): 255- 259. |
| LI X H , MIAO M , RAN B J , et al. UAV obstacle avoidance path planning based on improved A* algorithm[J]. Computer System Applications, 2021, 30 (2): 255- 259. | |
| 18 | CHOWDHURY M I, SCHWARTZ D G. The PRM-A path planning algorithm for UAVs: an application to navy mission planning[C]//Proc. of the Conference on Global Oceans, 2020. DOI: 10.1109/IEEECONF38699.2020.9388987. |
| 19 | LI X X, HU X G, WANG Z Q, et al. Path planning based on combination of improved A-STAR algorithm and DWA algorithm[C]//Proc. of the 2nd International Conference on Artificial Intelligence and Advanced Manufacture, 2020: 99-103. |
| 20 | WANG Y H, ZHANG W J, ZHOU T X. Path planning of surface unmanned craft based on variable step-length sparse A-star algorithm[C]//Proc. of the 33rd Chinese Control and Decision Conference, 2021: 1917-1920. |
| 21 | 牛佳伟. 基于协同A*算法的多无人机航迹规划[J]. 舰船电子工程, 2021, 41 (9): 66- 68. |
| NIU J W . Multi-UAV track planning based on cooperative A* algorithm[J]. Ship Electronic Engineering, 2021, 41 (9): 66- 68. | |
| 22 | 范铮铮, 王正平, 葛佳昊. 基于A*算法的多无人机实时打击航迹规划[J]. 战术导弹技术, 2021, (5): 94-101, 112. |
| FAN Z Z , WANG Z P , GE J H . Real-time multi-UAV strike trajectory planning based on A* algorithm[J]. Tactical Missile Technology, 2021, (5): 94-101, 112. | |
| 23 | HU C, ZHOU X L, DOU R, et al. Combined fast control of drifting state and trajectory tracking for autonomous vehicles based on MPC controller[C]//Proc. of the International Conference on Robotics and Automation, 2022: 1373-1379. |
| 24 | SHAO S K , HE C L , ZHAO Y J , et al. Efficient trajectory planning for UAVs using hierarchical optimization[J]. IEEE Access, 2021, 9, 60668- 60681. |
| 25 | TENGESDAL T , JOHANSEN T A , GRANDE T D , et al. Ship collision avoidance and anti grounding using parallelized cost evaluation in probabilistic scenario-based model predictive control[J]. IEEE Access, 2022, 10, 111650- 111664. |
| 26 | LEE C, KIM J. Nonlinear model predictive control of an auto-nomous underwater vehicle for terrain profile tracking[C]//Proc. of the 16th International Conference on Ubiquitous Robots, 2019: 771-774. |
| 27 | SAHU A, KANDATH H, KRISHNA K M. Model predictive control based algorithm for multi-target tracking using a swarm of fixed wing UAVs[C]//Proc. of the IEEE 17th International Conference on Automation Science and Engineering, 2021: 1255-1260. |
| 28 | ILLE M, NAMERIKAWA T. Collision avoidance between multi-UAV systems considering formation control using MPC[C]//Proc. of the IEEE International Conference on Advanced Intelligent Mechatronics, 2017: 651-656. |
| 29 | YUAN S T, ZHAO P C, ZHANG Q Y, et al. Research on model predictive control-based trajectory tracking for unmanned vehicles[C]//Proc. of the 4th International Conference on Control and Robotics Engineering, 2019: 79-86. |
| 30 | CAO G, LAI E M K, ALAM F. Gaussian process model predictive control of unmanned quadrotors[C]//Proc. of the 2nd International Conference on Control, Automation and Robotics, 2016: 200-206. |
| 31 | GUO J X, ZHENG Y K, QU D X, et al. An algorithm of foot end trajectory tracking control for quadruped robot based on model predictive control[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2019: 828-833. |
| 32 | 刘玄冰, 周绍磊, 肖支才, 等. 无人机避障方法研究综述[J]. 兵器装备工程学报, 2022, 43 (5): 40- 47. |
| LIU X B , ZHOU S L , XIAO Z C , et al. A review of research on obstacle avoidance methods for drones[J]. Journal of Ordnance Equipment Engineering, 2022, 43 (5): 40- 47. | |
| 33 | WAN K F , LI B , GAO X G , et al. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments[J]. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1490- 1508. |
| 34 | LI B , LIANG S Y , CHEN D Q , et al. A decision-making method for air combat maneuver based on hybrid deep learning network[J]. Chinese Journal of Electronics, 2022, 31 (1): 107- 115. |
| [1] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [2] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [3] | Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot [J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605. |
| [4] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [5] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [6] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [7] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [8] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [9] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [10] | GAI Jun-feng, ZHAO Guo-rong, SONG Chao. Model predictive control based on linearization and neural network approach [J]. Systems Engineering and Electronics, 2015, 37(2): 394-399. |
| [11] | TANG Xian-lun,LI Yang,LI Peng,ZHANG Yi. Multi-step model predictive control based on SVR multi-Agent particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2014, 36(5): 958-964. |
| [12] | GAO Xiao-guang, LI Qing-yuan, DI Ruo-hai. MPC three dimensional dynamic path planning for UAV based on DBN threat assessment [J]. Systems Engineering and Electronics, 2014, 36(11): 2199-2205. |
| [13] | CHEN Jin-dong,PAN Feng. Online support vector machine and genetic algorithm based predictive control [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1275-1280. |
| [14] | TANG Xiao-ming, DING Bao-cang. Model predictive control for networked control systems with arbitrary and bounded packet loss [J]. Journal of Systems Engineering and Electronics, 2011, 33(10): 2295-2300. |
| [15] | ZHU Zhi-bin, WANG Yan, CHEN Xing-lin. Research on numerical algorithms for nonlinear predictive control problems based on segmented state constraints [J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1436-1440. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||