Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (12): 3896-3907.doi: 10.12305/j.issn.1001-506X.2023.12.19
• Systems Engineering • Previous Articles
Research on multi-UAV cooperative target search method under unknown urban environment
Daqian LIU, Weidong BAO, Bowen FEI, Xiaomin ZHU
- College of Systems Engineering, National University of Defense Technology, Changsha 410073, China
-
Received:2022-05-07Online:2023-11-25Published:2023-12-05 -
Contact:Weidong BAO
CLC Number:
Cite this article
Daqian LIU, Weidong BAO, Bowen FEI, Xiaomin ZHU. Research on multi-UAV cooperative target search method under unknown urban environment[J]. Systems Engineering and Electronics, 2023, 45(12): 3896-3907.
share this article

Fig.1
Rasterized map of region Ω"


Fig.2
Moving direction identification of target and unmanned aerial vehicle"


Fig.3
Overall architecture of the MUCS"


Fig.4
Examples of hyperbolic tangent functions"


Fig.5
Example of revenue and cost of unmanned aerial vehicle formation"


Fig.6
Process of collaborative target search"

Table 1
Initial states of unmanned aerial vehicles"
| 无人机 | 初始位置 | 网格索引 | 初始方向 |
| U1 | (50, 750) | (1, 15) | 4 |
| U2 | (50, 1 500) | (1, 30) | 0 |
| U3 | (50, 2 250) | (1, 45) | 4 |
| U4 | (750, 50) | (15, 1) | 6 |
| U5 | (1 500, 50) | (30, 1) | 6 |
| U6 | (2 250, 50) | (45, 1) | 2 |
| U7 | (3 050, 50) | (61, 1) | 0 |
| U8 | (3 050, 750) | (61, 15) | 4 |
| U9 | (3 050, 1 500) | (61, 30) | 0 |
| U10 | (750, 3 050) | (15, 61) | 6 |
| U11 | (1 500, 3 050) | (30, 61) | 4 |
| U12 | (2 250, 3 050) | (45, 61) | 4 |
Table 2
Initial states of targets"
| 目标 | 初始位置 | 网格索引 | 初始方向 |
| T1 | (850, 850) | (17, 17) | 0 |
| T2 | (850, 1 650) | (17, 33) | 4 |
| T3 | (850, 2 250) | (17, 45) | 2 |
| T4 | (1 650, 850) | (33, 17) | 0 |
| T5 | (1 650, 1 650) | (33, 33) | 2 |
| T6 | (1 650, 2 250) | (33, 45) | 4 |
| T7 | (2 250, 850) | (45, 17) | 0 |
| T8 | (2 250, 1 650) | (45, 33) | 2 |
| T9 | (2 250, 2 250) | (45, 45) | 4 |
Table 3
Initial parameters of SSA"
| 指标参数 | SSA |
| 最大迭代次数 | 100 |
| 候选样本数量 | 10 |
| 样本维度 | 24 |
| 发现者数量 | 6 |
| 追随者数量 | 6 |
| 警戒者数量 | 3 |
| 位移量 | [-2, 2] |

Fig.7
3D flight paths of three methods under 400 search cycles"


Fig.8
Unmanned aerial vehicle motion trajectories of MUCS under three different search cycles"
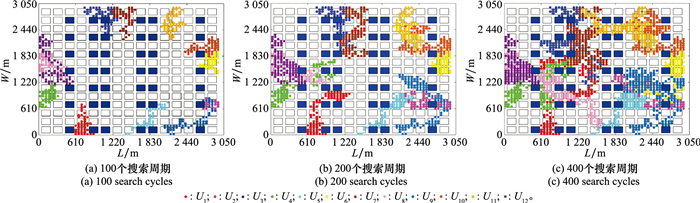

Fig.9
Target motion trajectories of MUCS under three different search cycles"


Fig.10
Distances between unmanned aerial vehicles of MUCS under three different search cycles"


Fig.11
Unmanned aerial vehicle motion trajectories of SSA under three different search cycles"


Fig.12
Target motion trajectories of SSA under three different search cycles"

Fig.13
Distances between unmanned aerial vehicles of SSA under three different search cycles"


Fig.14
Unmanned aerial vehicle motion trajectories of DPM under three different search cycles"


Fig.15
Target motion trajectories of DPM under three different search cycles"


Fig.16
Distances between unmanned aerial vehicles of DPM under three different search cycles"

Table 4
Captured target locations of three methods under 400 cycles"
| 发现目标位置 | 搜索方法 | ||
| MUCS | SSA | DMP | |
| T1 | (17, 11) | (17, 11) | (17, 19) |
| T2 | (45, 17) | (37, 42) | - |
| T3 | (25, 28) | - | (21, 57) |
| T4 | (33, 38) | (33, 42) | (33, 10) |
| T5 | (35, 33) | (28, 41) | (33, 33) |
| T6 | (33, 36) | (37, 56) | (46, 57) |
| T7 | (45, 14) | (45, 15) | (45, 19) |
| T8 | (42, 41) | (51, 29) | - |
| T9 | (47, 41) | (41, 49) | (29, 49) |
Table 5
Quantitative comparison of three methods"
| 搜索方法 | 搜索周期/s | 发现目标数量/个 | 区域覆盖率/% |
| MUCS | 100 | 2 | 23.28 |
| 200 | 6 | 42.57 | |
| 400 | 9 | 73.58 | |
| SSA | 100 | 2 | 20.34 |
| 200 | 6 | 41.53 | |
| 400 | 8 | 72.49 | |
| DPM | 100 | 4 | 19.20 |
| 200 | 6 | 39.36 | |
| 400 | 7 | 61.09 |
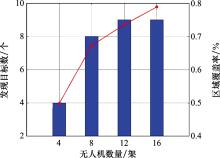
Fig.17
Search results of MUCS in 400 cycles"

Table 6
Search results of MUCS in different cycles"
| 无人机数量 | 搜索周期/s | 发现目标数/个 | 区域覆盖率/% |
| N=4 | 100 | 0 | 8.49 |
| 200 | 2 | 21.27 | |
| 400 | 4 | 49.84 | |
| N=8 | 100 | 1 | 14.54 |
| 200 | 3 | 34.33 | |
| 400 | 8 | 67.31 | |
| N=12 | 100 | 2 | 23.28 |
| 200 | 6 | 42.57 | |
| 400 | 9 | 73.58 | |
| N=16 | 100 | 5 | 35.45 |
| 200 | 9 | 65.15 | |
| 400 | 9 | 78.93 |

Fig.18
Search results under different detection radius"

Table 7
Search results of MUCS under different detection radius"
| 探测半径 | 搜索周期/s | 发现目标数量/个 | 区域覆盖率/% |
| r=1 | 50 | 0 | 10.76 |
| 100 | 2 | 23.28 | |
| 200 | 6 | 42.57 | |
| r=2 | 50 | 6 | 11.02 |
| 100 | 9 | 21.28 | |
| 200 | 9 | 37.28 | |
| r=3 | 50 | 8 | 10.34 |
| 100 | 9 | 21.84 | |
| 200 | 9 | 35.54 |
| 1 |
LIU D Q , BAO W D , ZHU X M , et al. Cooperative path optimization for multiple UAVs surveillance in uncertain environment[J]. IEEE Internet of Things Journal, 2022, 9 (13): 10676- 10692.
doi: 10.1109/JIOT.2021.3125784 |
| 2 |
GUPTA A , FERNANDO X . Simultaneous localization and mapping (SLAM) and data fusion in unmanned aerial vehicles: recent advances and challenges[J]. Drones, 2022, 6 (4): 85.
doi: 10.3390/drones6040085 |
| 3 |
DUAN H B , ZHAO J , DENG Y M , et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (1): 706- 720.
doi: 10.1109/TAES.2020.3029624 |
| 4 |
HAN R , WEN Y Q , BAI L , et al. Age of information aware UAV deployment for intelligent transportation systems[J]. IEEE Trans.on Intelligent Transportation Systems, 2022, 23 (3): 2705- 2715.
doi: 10.1109/TITS.2021.3117974 |
| 5 |
NIELSEN L , SUNG I , NIELSEN P . Convex decomposition for a coverage path planning for autonomous vehicles: interior extension of edges[J]. Sensors, 2019, 19 (19): 4165.
doi: 10.3390/s19194165 |
| 6 | 谢朋志, 魏晨. 单侧区域分割的多无人机扫描线搜索方法研究[J]. 航空兵器, 2020, 27 (3): 67- 72. |
| XIE P Z , WEI C . Research on scanning line search method for multi-UAV based on unilateral region segmentation[J]. Aero Weaponry, 2020, 27 (3): 67- 72. | |
| 7 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划研究[J]. 航空学报, 2020, 41 (S1): 723770. |
| DAI J , XU F , CHEN Q F . Study on multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 723770. | |
| 8 | WU Y , WU S B , HU X T . Multi-constrained cooperative path planning of multiple drones for persistent surveillance in urban environments[J]. Complex & Intelligent Systems, 2021, 7, 1633- 1647. |
| 9 |
WU Y , WU S B , HU X T . Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments[J]. IEEE Internet of Things Journal, 2021, 8 (6): 4906- 4919.
doi: 10.1109/JIOT.2020.3030240 |
| 10 |
YU H , MEIER K , ARGYLE M , et al. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles[J]. IEEE Trans.on Mechatronics, 2015, 20 (2): 541- 552.
doi: 10.1109/TMECH.2014.2301459 |
| 11 | 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39 (9): 1998- 2011. |
| LIU C , GAO X G , FU X W . Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. Systems Engineering and Electronics, 2017, 39 (9): 1998- 2011. | |
| 12 | 肖东, 江驹, 周俊, 等. 通信受限下多无人机协同运动目标搜索[J]. 哈尔滨工程大学学报, 2018, 39 (11): 1823- 1829. |
| XIAO D , JIANG J , ZHOU J , et al. Multi-UAV cooperation search for moving targets under limited communication[J]. Journal of Harbin Engineering University, 2018, 39 (11): 1823- 1829. | |
| 13 | TANG Q R , YU F C , ZHANG Y , et al. A stigmergetic method based on vector pheromone for target search with swarm robots[J]. Journal of Experimental & Theoretical Artificial Intelligence, 2019, 32 (3): 533- 555. |
| 14 | 黄杰, 孙伟, 高渝. 双属性概率图优化的无人机集群协同目标搜索[J]. 系统工程与电子技术, 2020, 42 (1): 118- 127. |
| HUANG J , SUN W , GAO Y . Cooperative searching for the multi-UAVs based on dual-attribute probability model optimization[J]. Systems Engineering and Electronics, 2020, 42 (1): 118- 127. | |
| 15 |
LIU Z , GAO X G , FU X W . A cooperative search and coverage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18 (5): 1472.
doi: 10.3390/s18051472 |
| 16 |
YAO P , WANG H L , JI H X . Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016, 55, 131- 143.
doi: 10.1016/j.ast.2016.05.016 |
| 17 |
CARABAZA S , BESADA P E , LPREZ O J , et al. Ant colony optimization for multi-UAV minimum time search in uncertain domains[J]. Applied Soft Computing, 2018, 62, 789- 806.
doi: 10.1016/j.asoc.2017.09.009 |
| 18 | PURBOLINGGA Y, JAZIDIE A, EFFENDI R. Modified ant colony algorithm for swarm multi agent exploration on target searching in unknown environment[C]//Proc. of the International Conference of Artificial Intelligence and Information Technology, 2019. DOI: 10.1109/ICAⅡT.2019.8834573. |
| 19 |
ZHEN Z Y , CHEN Y , WEN L D , et al. An intelligent coope-rative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 20 | YANG J , WANG X , BAUER P . Extended PSO based collaborative searching for robotic swarms with practical constraints[J]. IEEE Access, 2019, 7, 76328- 76341. |
| 21 | SAADAOUI H , BOUANANI F , ILLI E . Information sharing based on local PSO for UAVs cooperative search of moved targets[J]. IEEE Access, 2021, 9, 134998- 135011. |
| 22 | MEN T, LIU D Q, ZHU X, et al. Cooperative target search for UAVs in urban environment[C]//Proc. of the IEEE International Conference on Smart City and Informatization, 2021. DOI: 10.1109/ISCI53438.2021.00011. |
| 23 | JUANG C F , YEH Y T . Multi-objective evolution of biped robot gaits using advanced continuous ant-colon optimized recurrent neural networks[J]. IEEE Trans.on Cybernetics, 2018, 48 (6): 1910- 1922. |
| 24 | LIU D Q, BAO W D, FEI B W, et al. Multi-UAV cooperative obstacle avoidance and surveillance in intelligent transportation[C]// Proc. of the IEEE 20th International on Trust, Security and Privacy in Computing and Communcations, 2021. |
| 25 | LI J , XIONG Y H , SHE J H , et al. A path planning method for sweep coverage with multiple UAVs[J]. IEEE Internet of Things Journal, 2020, 7 (9): 8967- 8978. |
| 26 | BO N, LI X M, DAI J J, et al. A hierarchical optimization strategy of trajectory planning for multi-UAVs[C]//Proc. of the 9th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2017: 294-298. |
| 27 | XUE J K , SHEN B . A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8 (1): 22- 34. |
| 28 | FEI B W , BAO W D , ZHU X M , et al. Autonomous cooperative search model for multi-UAV with limited communication network[J]. IEEE Internet of Things Journal, 2022, 9 (19): 19346- 19361. |
| 29 | KASHINO Z , NEJAT G , BENHABIB B . A hybrid strategy for target search using static and mobile sensors[J]. IEEE Trans.on Cybernetics, 2020, 50 (2): 856- 868. |
| 30 | YUE W , XI Y , GUAN X H . A new searching approach using improved multi-ant colony scheme for multi-UAVs in unknown environments[J]. IEEE Access, 2019, 7, 161094- 161102. |
| 31 | HU X X , LIU Y H , WANG G Q . Optimal search for moving targets with sensing capabilities using multiple UAVs[J]. Journal of Systems Engineering and Electronics, 2017, 28 (3): 526- 535. |
| [1] | Xiaomin ZHU, Daqian LIU, Bowen FEI, Tong MEN. Cooperative search method for multiple UAVs under local communication [J]. Systems Engineering and Electronics, 2022, 44(12): 3783-3791. |
| [2] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [3] | Jinming DU, Yunhua WU, Zhiming CHEN, bing HUA, Xinyi XU, yi ZHU, Chengfei YUE. Latent area prediction and search method for marine moving targets using game theory [J]. Systems Engineering and Electronics, 2021, 43(9): 2508-2515. |
| [4] | LI Juan, ZHANG Bingjian, YANG Lijuan, WANG Mengdi. Multi-AUV target search algorithm with cognitive based adaptive optimization in unknown environment#br# [J]. Systems Engineering and Electronics, 2018, 40(8): 1839-1845. |
| [5] | LIU Zhong, GAO Xiaoguang, FU Xiaowei. Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone [J]. Systems Engineering and Electronics, 2017, 39(9): 1998-2011. |
| [6] | ZHOU Wen-hong, LEI Xin, JIANG Jian-guo, ZHOU Jia-wei. Variable probability and hybrid bacterial foraging optimization algorithm [J]. Systems Engineering and Electronics, 2016, 38(4): 960-964. |
| [7] | PENG Hui, SU Fei, SHEN Lin-cheng. Extended search map approach for multiple UAVs wide area target searching [J]. Journal of Systems Engineering and Electronics, 2010, 32(4): 795-798. |
| [8] | YANG Dao-jian, QI Er-shi. Product differentiation and information sharing under supply chain competition [J]. Journal of Systems Engineering and Electronics, 2009, 31(9): 2141-2145. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||