Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (11): 3597-3605.doi: 10.12305/j.issn.1001-506X.2023.11.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Gaussian-mixture-process-based task-space predictive control method for space robot
Ziran LIU1, Zijian DAI2, Chengfei YUE2,*, Peiji WANG2, Xibin CAO1
- 1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
2. Institute of Space Science and Applied Technology, Harbin Institute of Technology (Shenzhen), Shenzhen 518055, China
-
Received:2022-11-30Online:2023-10-25Published:2023-10-31 -
Contact:Chengfei YUE
CLC Number:
Cite this article
Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot[J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605.
share this article
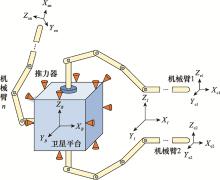
Fig.1
Space robot model"
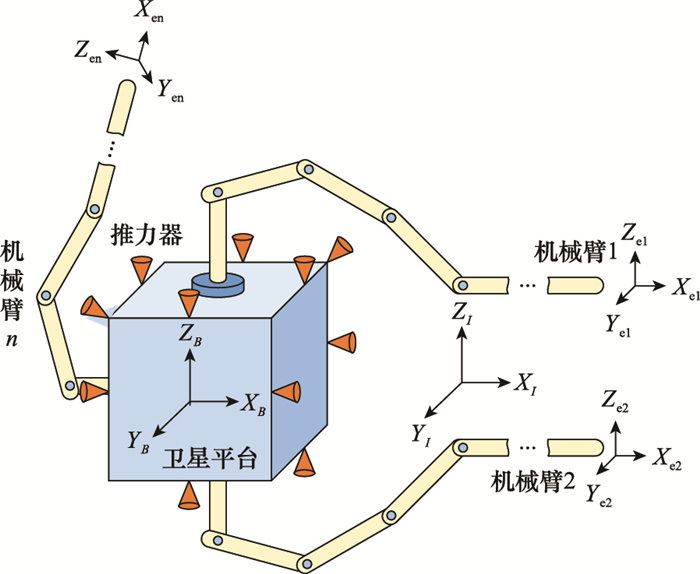
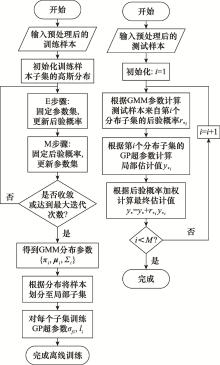
Fig.2
Diagram for GMM-based disturbance training (left) and estimation (right) method"
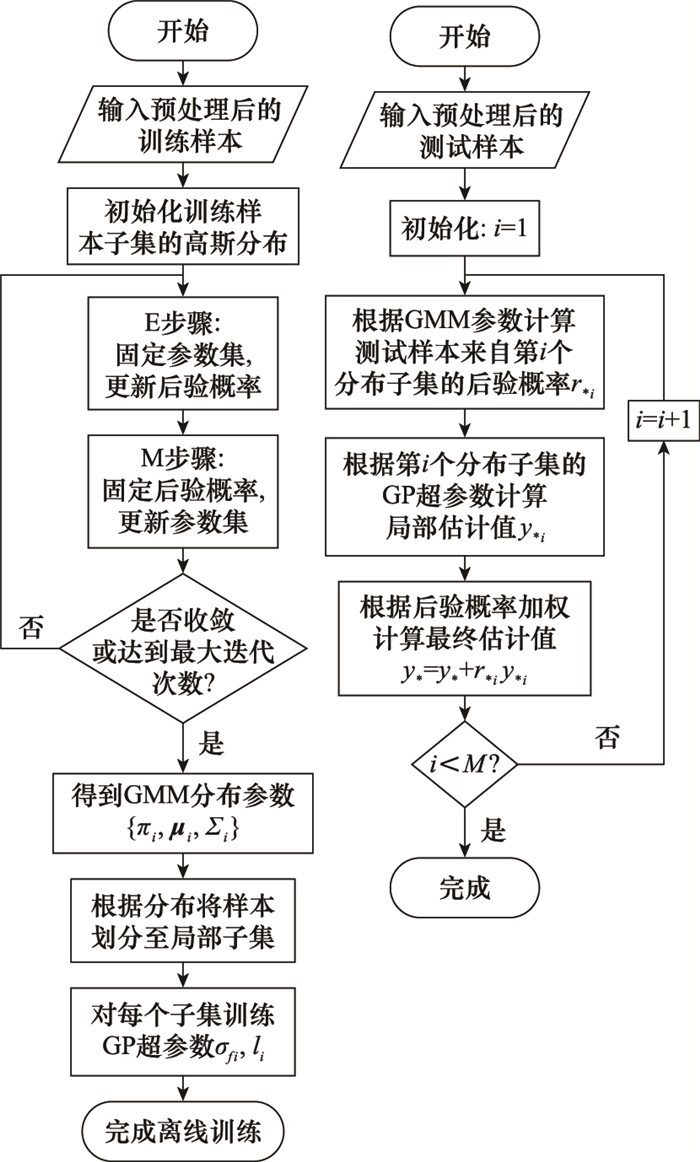
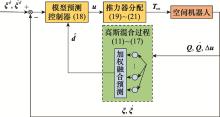
Fig.3
Block diagram of GMM-MPC"
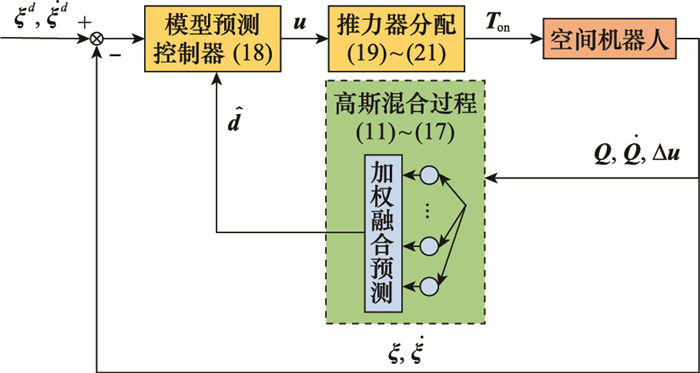

Fig.4
Space robot simulation model"
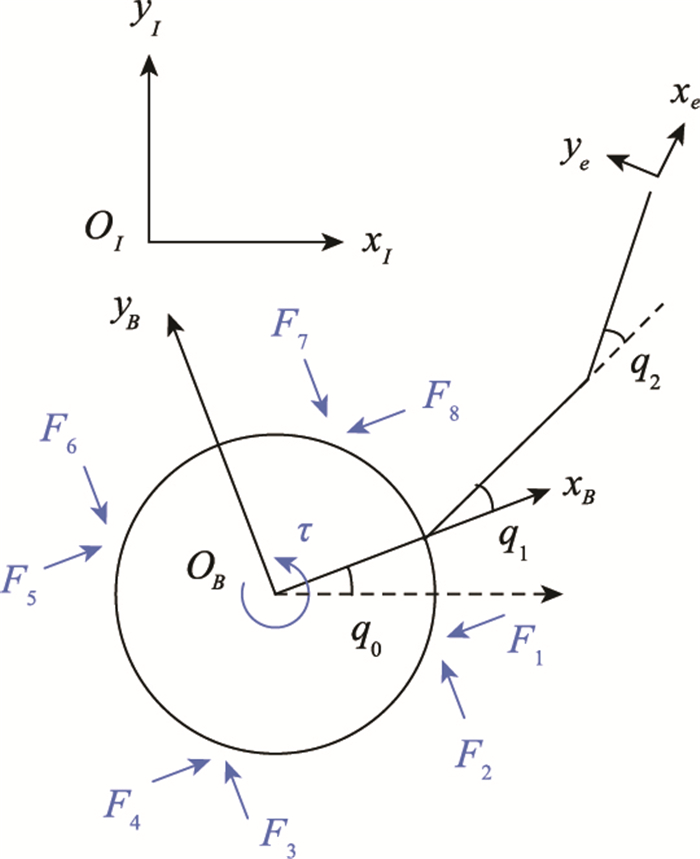
Table 1
Space robot inertial parameters"
| 参数 | 基座 | 连杆1 | 连杆2 |
| 质量/kg | 12.9 | 2.5 | 2.5 |
| 尺寸/m | 0.25×0.25 | 0.6 | 0.6 |
| 惯量/(kg·m2) | 0.4 | 0.3 | 0.3 |
Table 2
Thrusters configuration"
| 推力器 | [xTl, yTl]T/m | βl/(°) |
| T1 | (0.171, -0.154) | 180 |
| T2 | (0.154, -0.171) | 90 |
| T3 | (-0.154, -0.171) | 90 |
| T4 | (-0.171, -0.154) | 0 |
| T5 | (-0.171, 0.154) | 0 |
| T6 | (-0.154, 0.171) | -90 |
| T7 | (0.154, 0.171) | -90 |
| T8 | (0.171, 0.154) | 180 |
Table 3
Simulation parameters"
| 参数 | 取值 |
| 轨迹初始状态ξ1 | [0, 0, 0.1 rad, 1.311 7 m, 0.690 6 m, 0.710 9 rad]T |
| 轨迹末状态ξf | [0.1 m, 0.1 m, 0, 1.092 2 m, 0.989 6 m, 1.309 0 rad]T |
| 仿真步长δt/s | 0.01 |
| 运动时间tf/s | 25 |
| 样本子集个数M | 3 |
| 预测步数N | 20 |
| 预测时域T/s | 0.2 |
| 控制增益Qr | diag(0.005 I5×1) |
| 控制增益Qt | diag([30 I6×1, 60I6×1]) |
| 推力上下限Tlb, Tub/N | [0, 0.5] |
| 最小开机时间Δtc/s | 0.03 |

Fig.5
Test results of GMM"

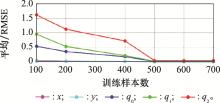
Fig.6
Relationship between GMM results and the number of samples"
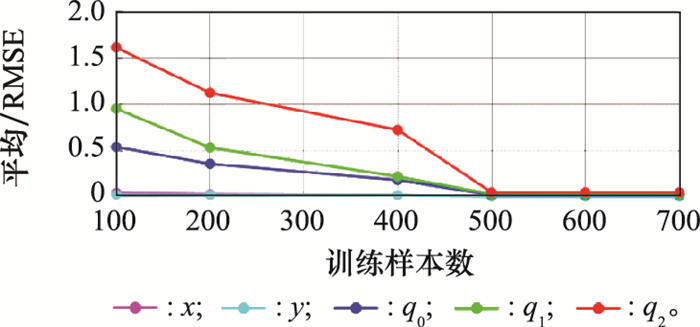
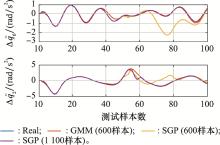
Fig.7
Comparison between GMM and SGP"
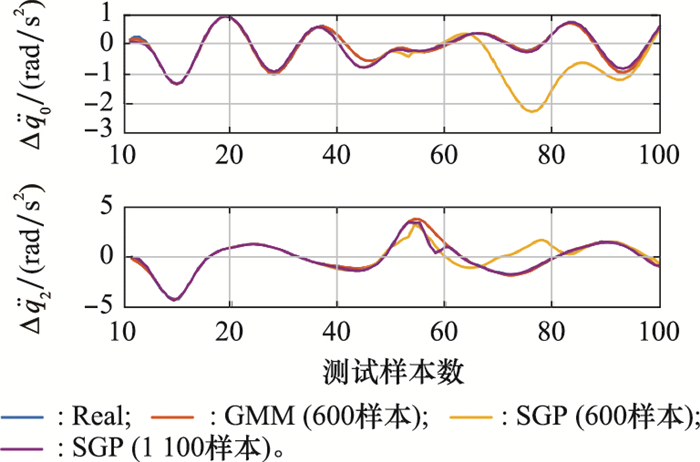

Fig.8
Desired trajectory for space robot"
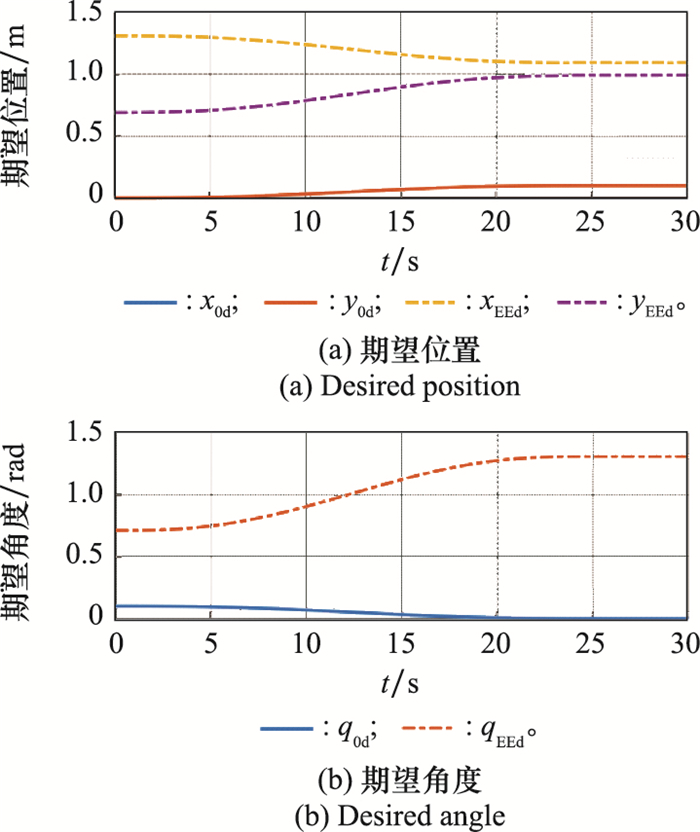

Fig.9
Tracking results of GMM-MPC"
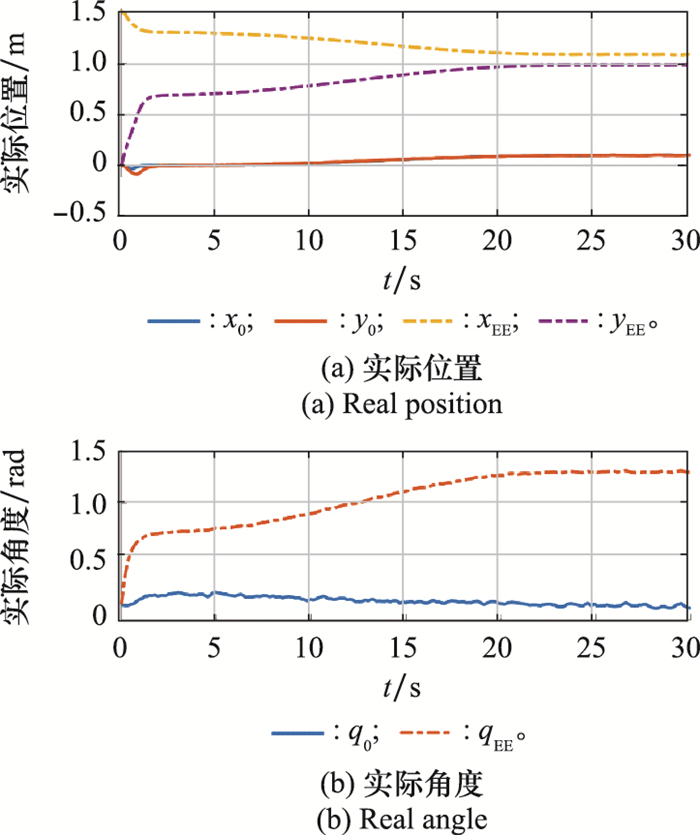

Fig.10
Tracking error of GMM-MPC"


Fig.11
Tracking error of nominal MPC"
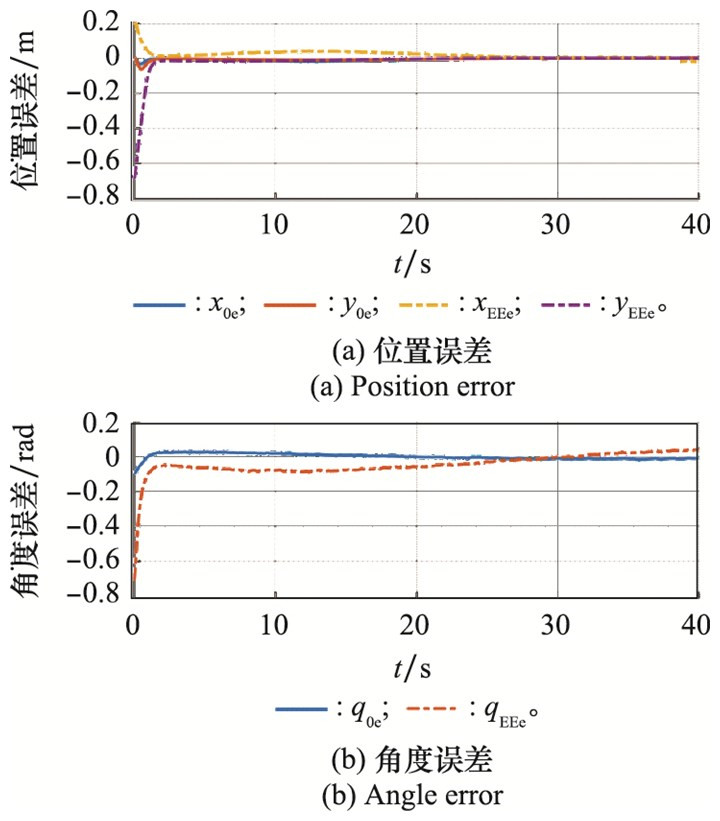
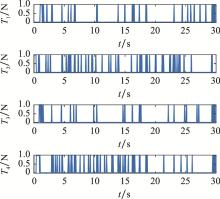
Fig.12
Actuation of thrusters T1-T4"
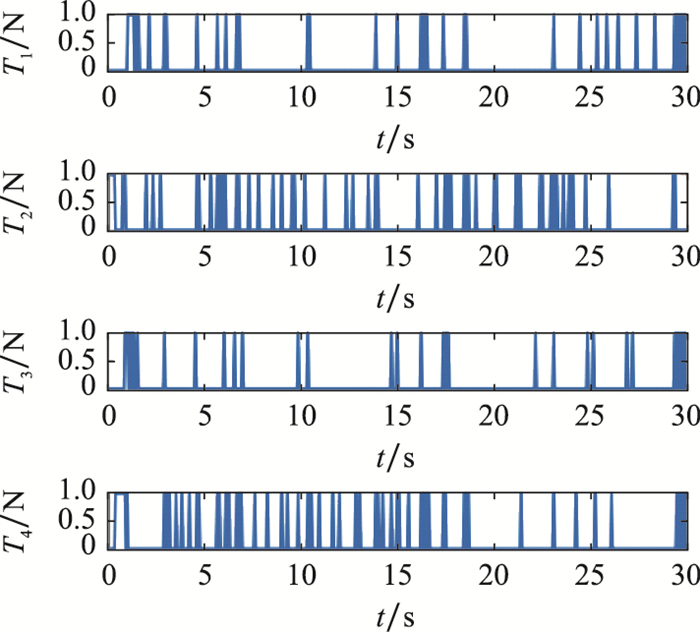
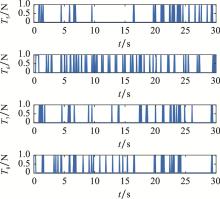
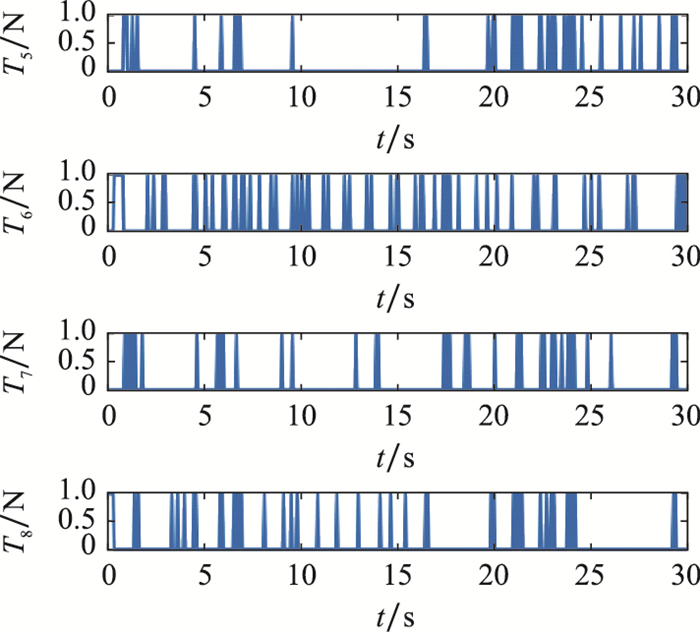
Fig.13
Actuation of thrusters T5-T8"
| 1 | 肖洪, 成正爱, 郭宏伟, 等. 空间太阳能电站大折展比体展开桁架机构[J]. 机械工程学报, 2020, 56 (13): 128- 137. |
| XIAO H , CHENG Z A , GUO H W , et al. Large folding ratio 3D deployable truss mechanism for space solar power station[J]. Journal of Mechanical Engineering, 2020, 56 (13): 128- 137. | |
| 2 | HAWS T D, ZIMMERMAN J S, FULLER M E. SLS, the gateway, and a lunar outpost in the early 2030s[C]//Proc. of the IEEE Aerospace Conference, 2019. |
| 3 |
NAKANISHI J , CORY R , MISTRY M , et al. Operational space control: a theoretical and empirical comparison[J]. The International Journal of Robotics Research, 2008, 27 (6): 737- 757.
doi: 10.1177/0278364908091463 |
| 4 |
KHATIB O . A unified approach for motion and force control of robot manipulators: the operational space formulation[J]. IEEE Journal on Robotics and Automation, 1987, 3 (1): 43- 53.
doi: 10.1109/JRA.1987.1087068 |
| 5 | HOGAN N. Impedance control: an approach to manipulation[C]//Proc. of the IEEE American Control Conference, 1984: 304-313. |
| 6 |
LIPPIELLO V , FONTANELLI G A , RUGGIERO F . Image-based visual-impedance control of a dual-arm aerial manipulator[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 1856- 1863.
doi: 10.1109/LRA.2018.2806091 |
| 7 |
WANG X Y , SHI L L , KATUPITIYA J . A strategy to decele-rate and capture a spinning object by a dual-arm space robot[J]. Aerospace Science and Technology, 2021, 113, 106682.
doi: 10.1016/j.ast.2021.106682 |
| 8 |
YILMAZ B M , TATLICIOGLU E , SAVRAN A , et al. Self-adjusting fuzzy logic based control of robot manipulators in task space[J]. IEEE Trans.on Industrial Electronics, 2022, 69 (2): 1620- 1629.
doi: 10.1109/TIE.2021.3063970 |
| 9 | 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战[J]. 自动化学报, 2013, 39 (3): 222- 236. |
| XI Y G , LI D W , LIN S . Model predictive control—status and challenges[J]. Acta Automatica Sinica, 2013, 39 (3): 222- 236. | |
| 10 | 徐杨, 陆丽萍, 褚端峰, 等. 无人车辆轨迹规划与跟踪控制的统一建模方法[J]. 自动化学报, 2019, 45 (4): 799- 807. |
| XU Y , LU L P , CHU D F , et al. Unified modeling of trajectory planning and tracking for unmanned vehicle[J]. Acta Automatica Sinica, 2019, 45 (4): 799- 807. | |
| 11 | 宗立军, 罗建军, 王明明, 等. 自由漂浮空间机器人多约束混合整数预测控制[J]. 宇航学报, 2016, 37 (8): 992- 1000. |
| ZONG L J , LUO J J , WANG M M , et al. A mixed integer predictive controller with multi-constraint for free-floating space robots[J]. Journal of Astronautics, 2016, 37 (8): 992- 1000. | |
| 12 |
NUBERT J , KOHLER J , BERENZ V , et al. Safe and fast tracking on a robot manipulator: robust mpc and neural network control[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 3050- 3057.
doi: 10.1109/LRA.2020.2975727 |
| 13 | RYBUS T , SEWERYN K , SASIADEK J Z . Control system for free-floating space manipulator based on nonlinear model predictive control (NMPC)[J]. Journal of Intelligent & Robotic Systems, 2017, 85 (3/4): 491- 509. |
| 14 |
SHI L , KAYASTHA S , KATUPITIYA J . Robust coordinated control of a dual-arm space robot[J]. Acta Astronautica, 2017, 138, 475- 489.
doi: 10.1016/j.actaastro.2017.06.009 |
| 15 | TORRENTE G , KAUFMANN E , FOHN P , et al. Data-driven MPC for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 3769- 3776. |
| 16 | WOOLFREY J , LU W , LIU D . Predictive end-effector control of manipulators on moving platforms under disturbance[J]. IEEE Trans.on Robotics, 2021, 37 (6): 2210- 2217. |
| 17 | CALDWELL J, MARSHALL J A. Towards efficient learning-based model predictive control via feedback linearization and Gaussian process regression[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 4306-4311. |
| 18 | LEEN T, DIETTERICH T, TRESP V. Advances in neural information processing systems[M]//TRESP V, ed. Mixtures of Gaussian processes. Massachusetts: MIT Press, 2000. |
| 19 | LIU Y F , WANG X , TANG Z H , et al. Probabilistic ensemble neural network model for long-term dynamic behavior prediction of free-floating space manipulators[J]. Aerospace Science and Technology, 2021, 119, 107138. |
| 20 | 陈友东, 刘嘉蕾, 胡澜晓. 一种基于高斯过程混合模型的机械臂抓取方法[J]. 机器人, 2019, 41 (3): 343- 352. |
| CHEN Y D , LIU J L , HU L X . A manipulator grasping method based on mixture of Gaussian processes model[J]. Robot, 2019, 41 (3): 343- 352. | |
| 21 | KABZAN J , HEWING L , LINIGER A , et al. Learning-based model predictive control for autonomous racing[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 3363- 3370. |
| 22 | ANDERSSON J A E , GILLIS J , HORN G , et al. CasADi: a software framework for nonlinear optimization and optimal control[J]. Mathematical Programming Computation, 2019, 11 (1): 1- 36. |
| 23 | VERSCHUEREN R , FRISON G , KOUZOUPIS D , et al. ACADOS—a modular open-source framework for fast embedded optimal control[J]. Mathematical Programming Computation, 2022, 14 (1): 147- 183. |
| 24 | JIA S Y , SHAN J J . Finite-time trajectory tracking control of space manipulator under actuator saturation[J]. IEEE Trans.on Industrial Electronics, 2020, 67 (3): 2086- 2096. |
| [1] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [2] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [3] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [4] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [5] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [6] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [7] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [8] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [9] | HUANG Pan-feng1,2, ZHANG Fan1,2, LIU Bin-bin1,2, MA Jun1,2. Optimal control of the rotating velocity of hub-spoke tethered space robot formation [J]. Systems Engineering and Electronics, 2015, 37(6): 1362-1369. |
| [10] | GAI Jun-feng, ZHAO Guo-rong, SONG Chao. Model predictive control based on linearization and neural network approach [J]. Systems Engineering and Electronics, 2015, 37(2): 394-399. |
| [11] | TANG Xian-lun,LI Yang,LI Peng,ZHANG Yi. Multi-step model predictive control based on SVR multi-Agent particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2014, 36(5): 958-964. |
| [12] | GAO Xiao-guang, LI Qing-yuan, DI Ruo-hai. MPC three dimensional dynamic path planning for UAV based on DBN threat assessment [J]. Systems Engineering and Electronics, 2014, 36(11): 2199-2205. |
| [13] | CHEN Jin-dong,PAN Feng. Online support vector machine and genetic algorithm based predictive control [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1275-1280. |
| [14] | ZHANG Wen-hui, QI Nai-ming, GAO Jiu-zhou. Robust control of free-floating space robot based on neural network [J]. Journal of Systems Engineering and Electronics, 2011, 33(6): 1332-1336. |
| [15] | WANG Yong-zhi1, HU Qing-lei2, SHI Zhong1,3. Trajectory planning of free floating space robot for minimizing spacecraft attitude disturbance [J]. Journal of Systems Engineering and Electronics, 2011, 33(10): 2277-2281. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||