Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 265-277.doi: 10.12305/j.issn.1001-506X.2026.01.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Cooperative relative navigation method for aircraft formation in under-measurement conditions
Zhixing ZHUANG1, Baichun GONG1,*, Mingrui HAO2, Ziwen WANG2
- 1. College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
2. Beijing Electro-mechanical Engineering Institute,Beijing 100074,China
-
Received:2024-07-12Online:2026-01-25Published:2026-02-11 -
Contact:Baichun GONG
CLC Number:
Cite this article
Zhixing ZHUANG, Baichun GONG, Mingrui HAO, Ziwen WANG. Cooperative relative navigation method for aircraft formation in under-measurement conditions[J]. Systems Engineering and Electronics, 2026, 48(1): 265-277.
share this article
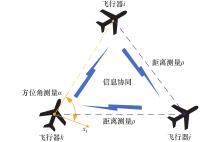
Fig.1
Diagram of relative measurement scheme"
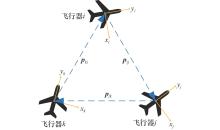
Fig.2
Diagram of relative position"
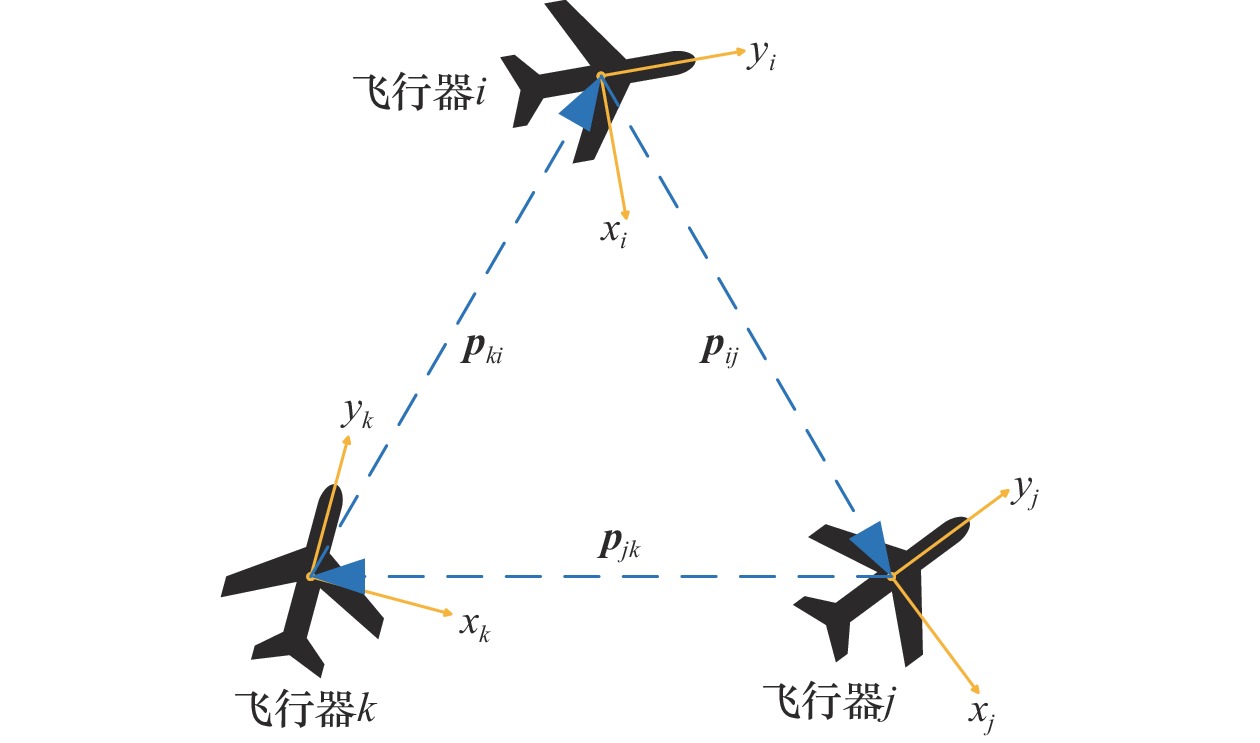

Fig.3
Filtering algorithm flow"
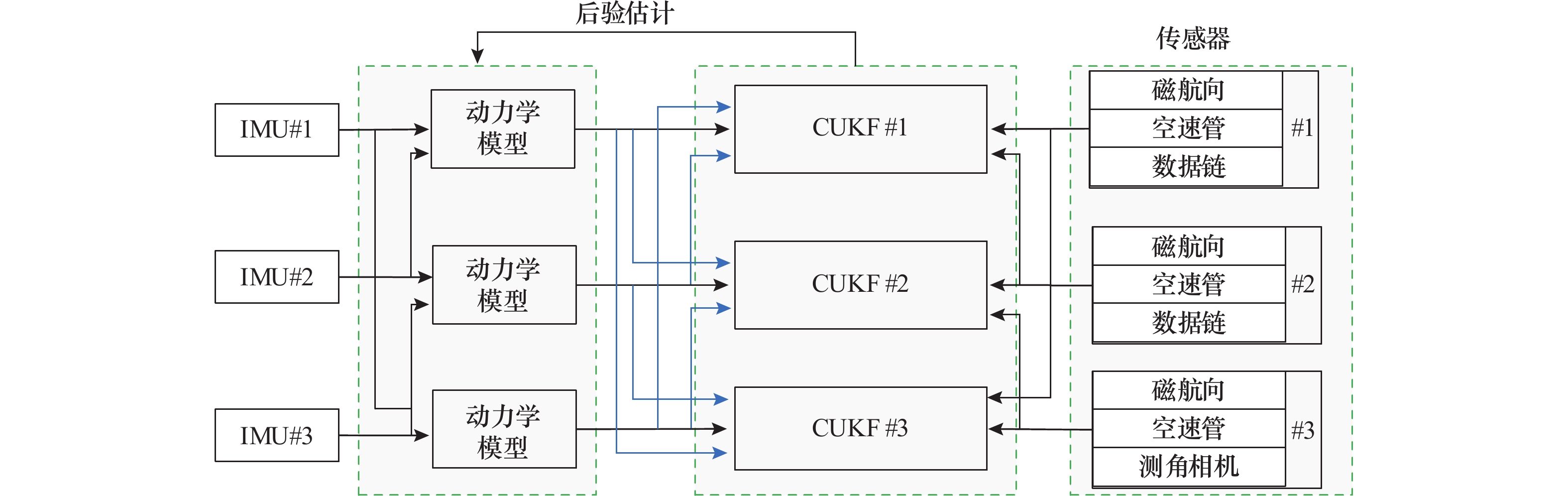
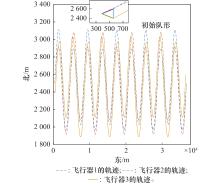
Fig.4
Flight trajectories that meet observability requirements"
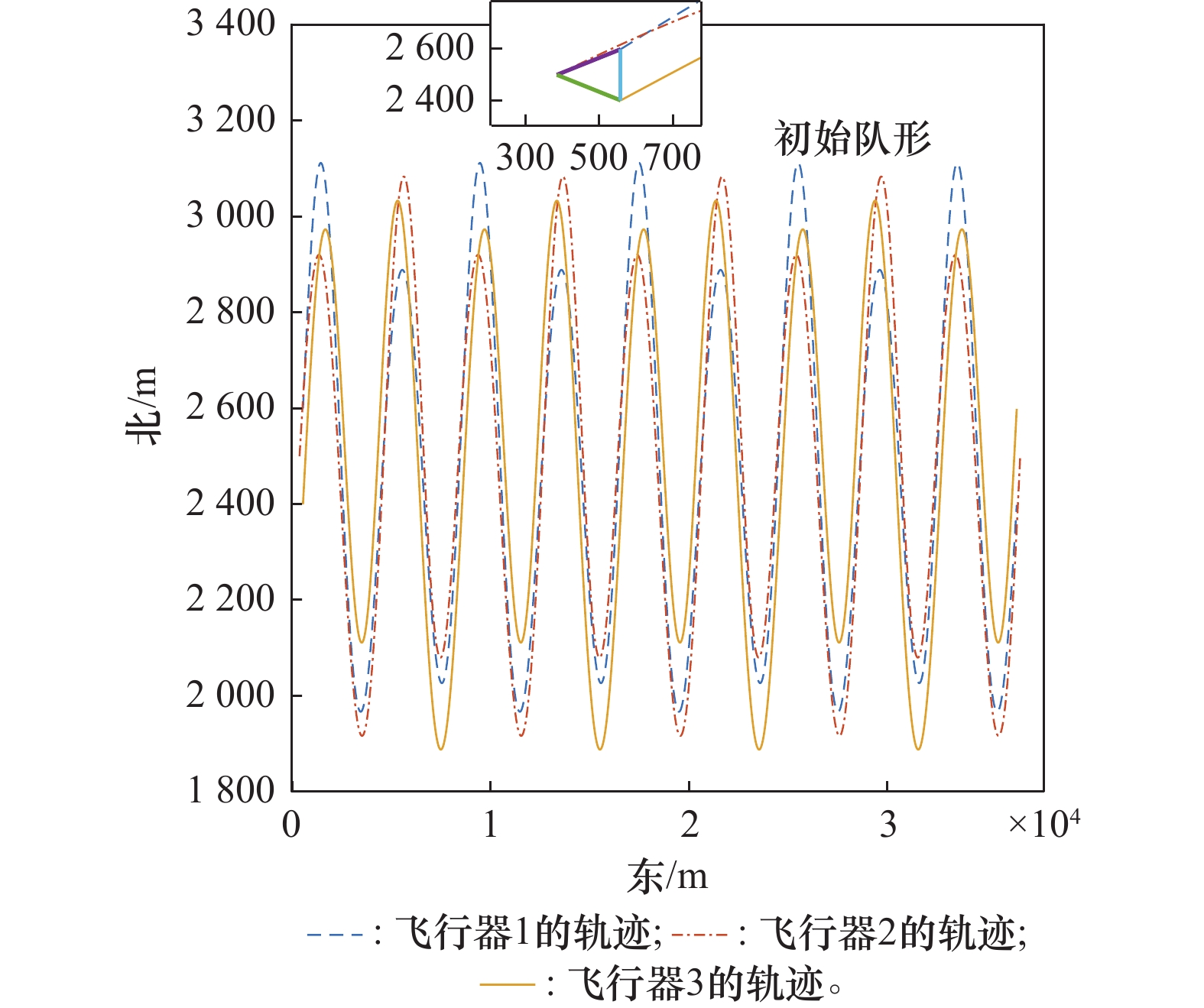
Table 1
Filter initial state settings"
| 参数 | 值 |
| 陀螺仪常值误差估计误差/(°/h) | 50 |
| 航向角差估计误差/(°) | 5 |
| 加速度计常值误差估计误差/mg | 1 |
| 相对位置估计误差/m | 1 |
| 空速管常值误差估计误差/(m/s) | 10 |
| 速度估计误差/(m/s) | 1 |
Table 2
Filter performance settings"
| 参数 | 值 | 参数 | 值 | 参数 | 值 | ||
| 陀螺仪 常值偏差/(°/h) | 50 | 加速度计 常值偏差/mg | 1 | 空速管 常值误差/(m/s) | 10 | ||
| 陀螺仪 随机误差/(°/h) | 5 | 加速度计 随机误差/mg | 0.1 | 空速管 随机误差/(m/s) | 1 | ||
| 航向角 测量误差/(°) | 5 | 方位角 测量误差/(°) | 1 | 距离 测量误差/m | 10 |
Fig.5
Estimation error of relative position when theoretically unobservable"
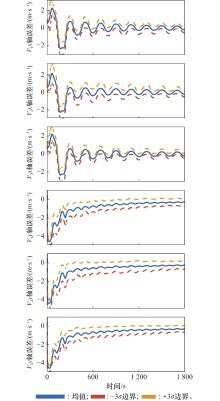
Fig.6
Estimation error of velocity when theoretically unobservable"


Fig.7
Estimation error on constant deviation of inertial device when theoretically unobservable"
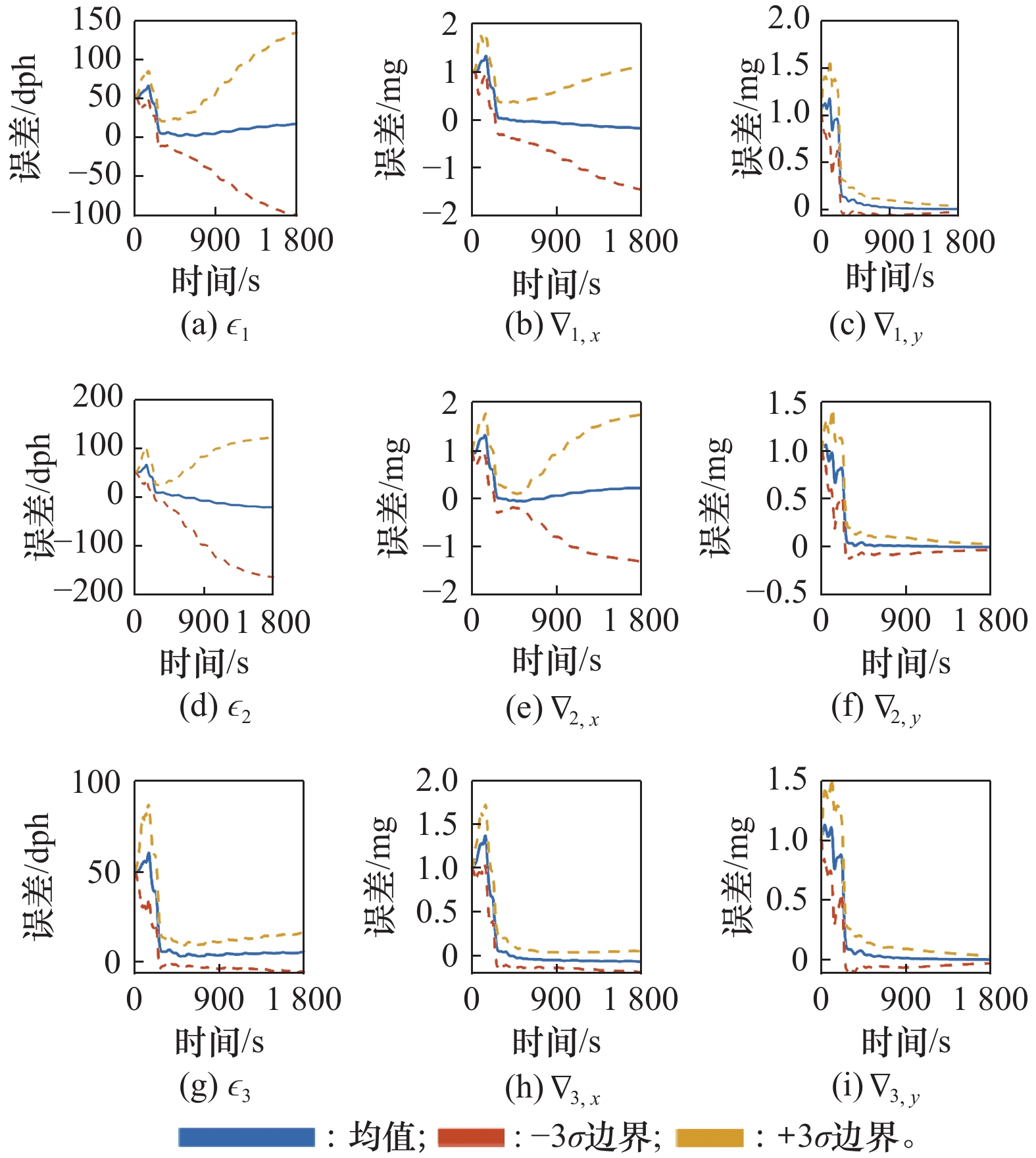

Fig.8
Estimation error of pitot tube constant error and heading difference when theoretically unobservable"
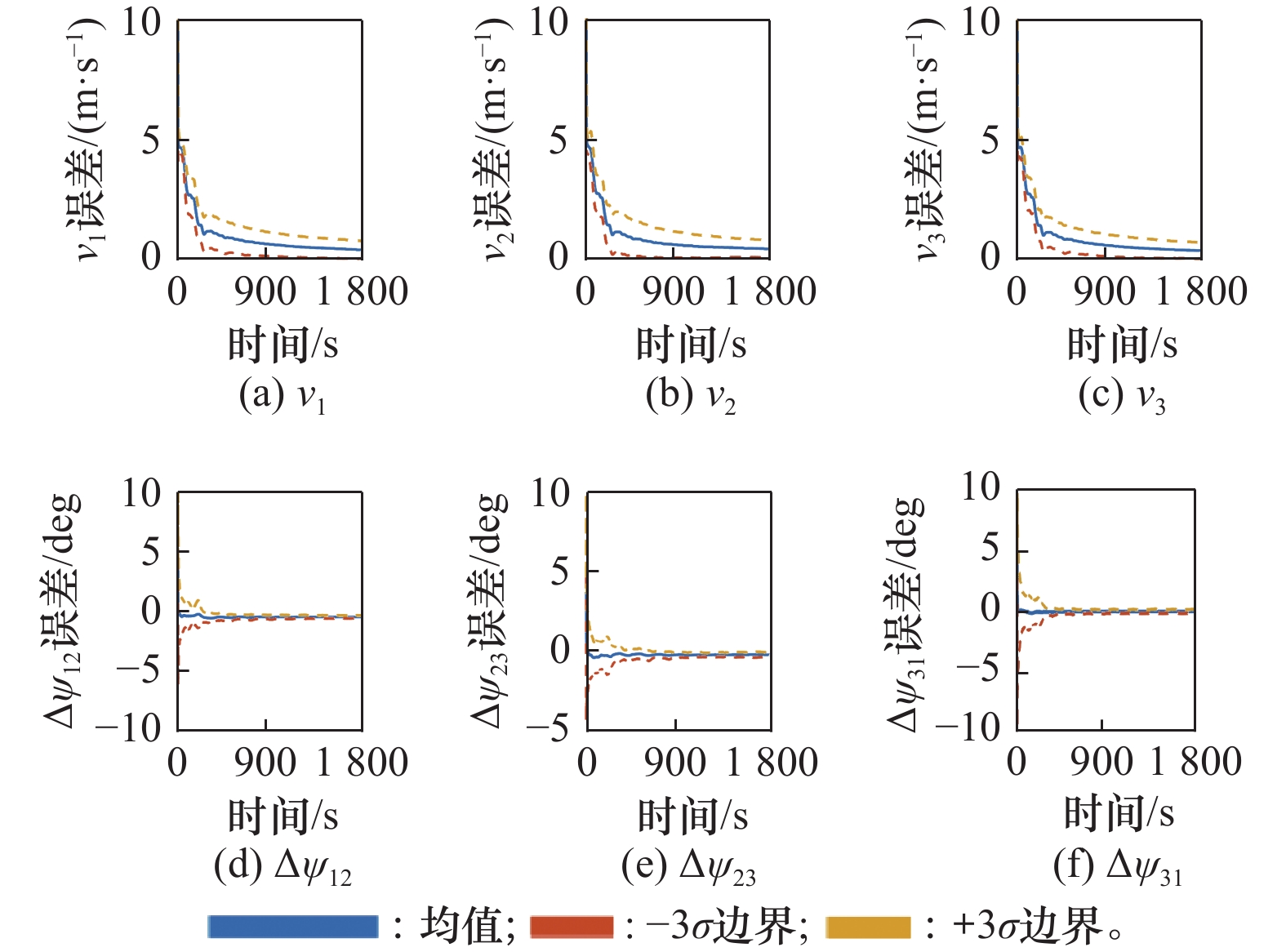
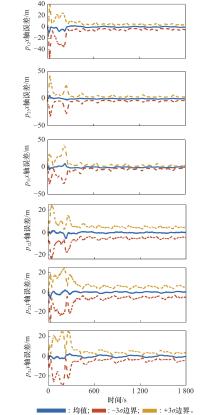
Fig.9
Estimation error of relative position when theoretically observable"
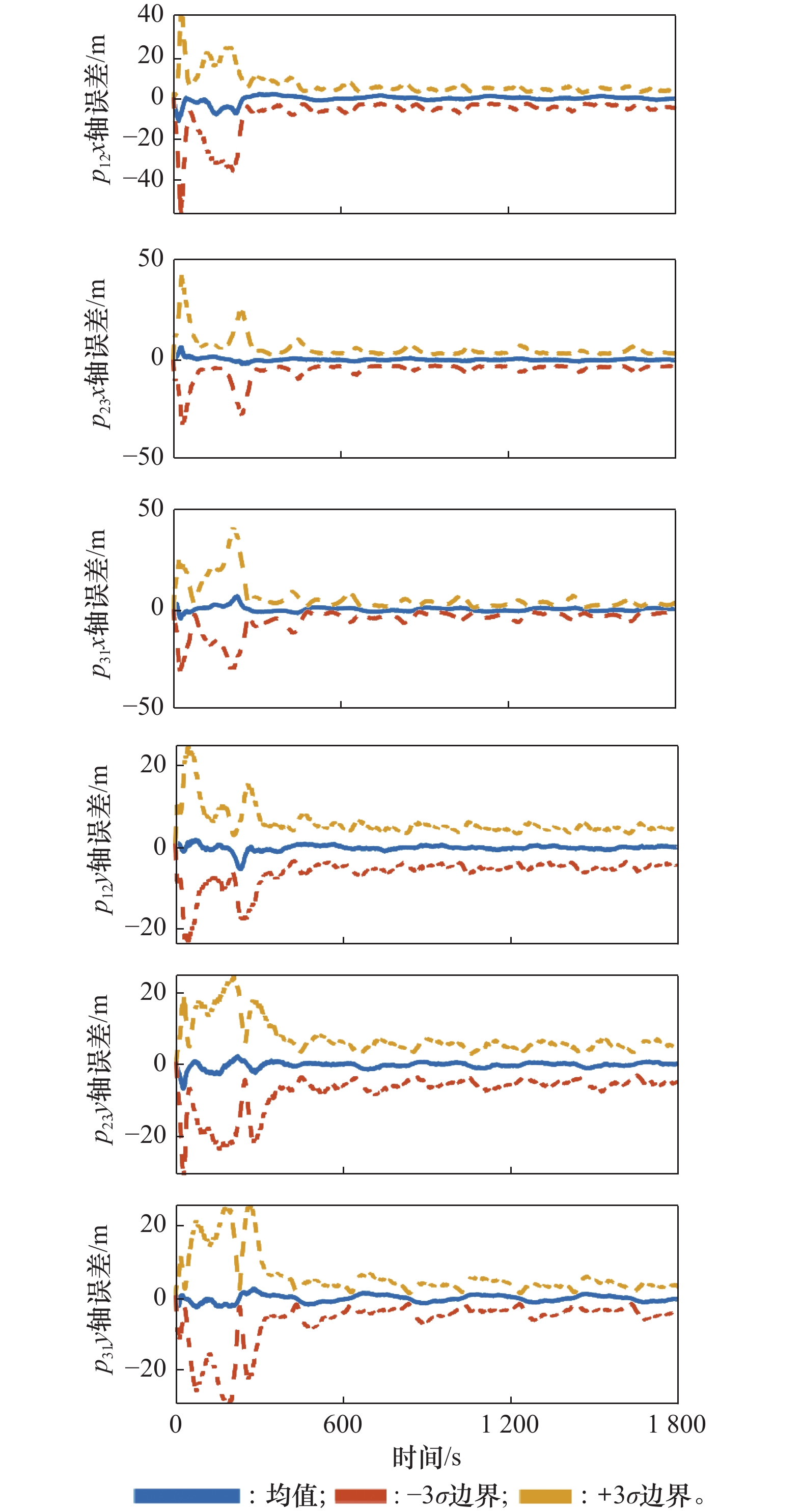

Fig.10
Estimation error of velocity when theoretically observable"
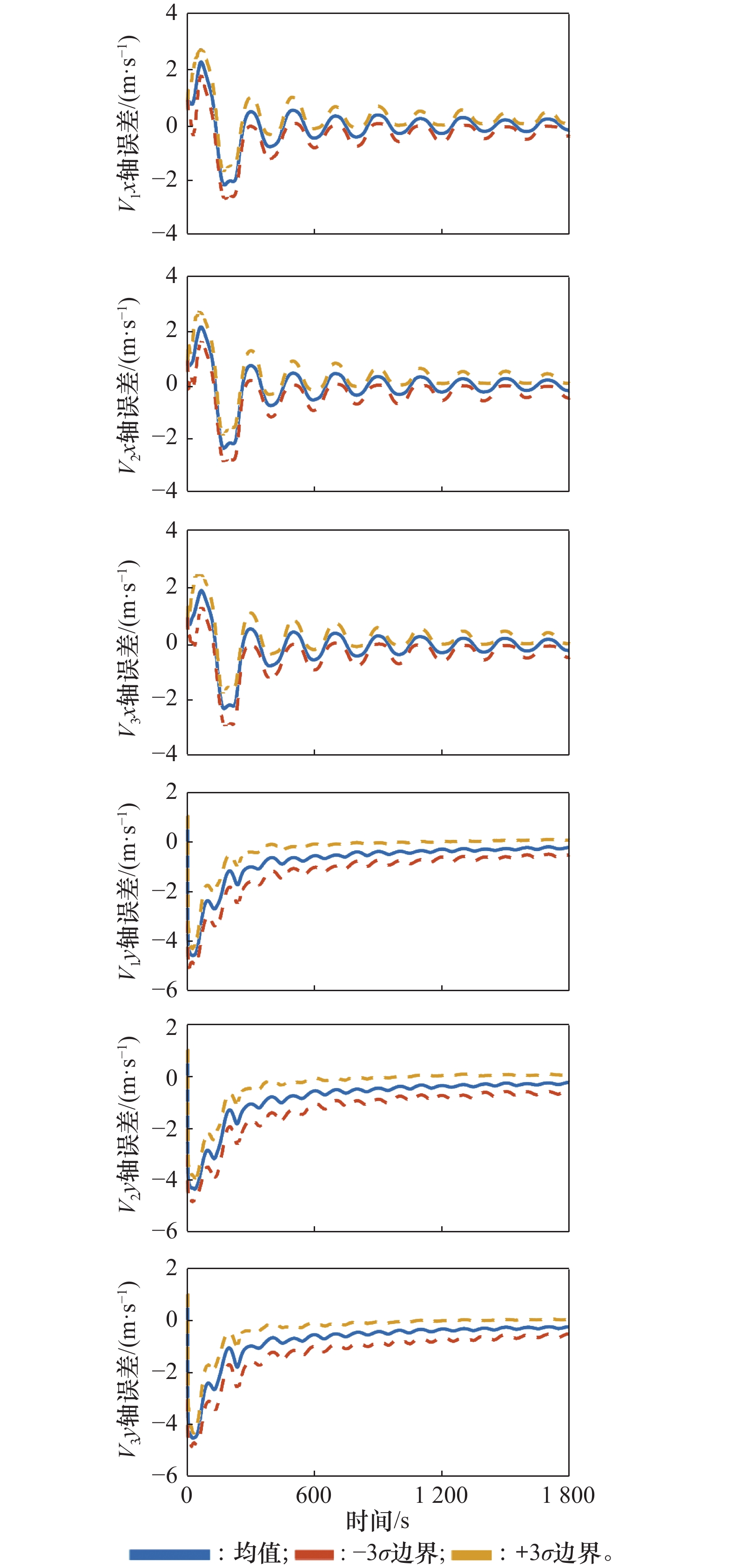

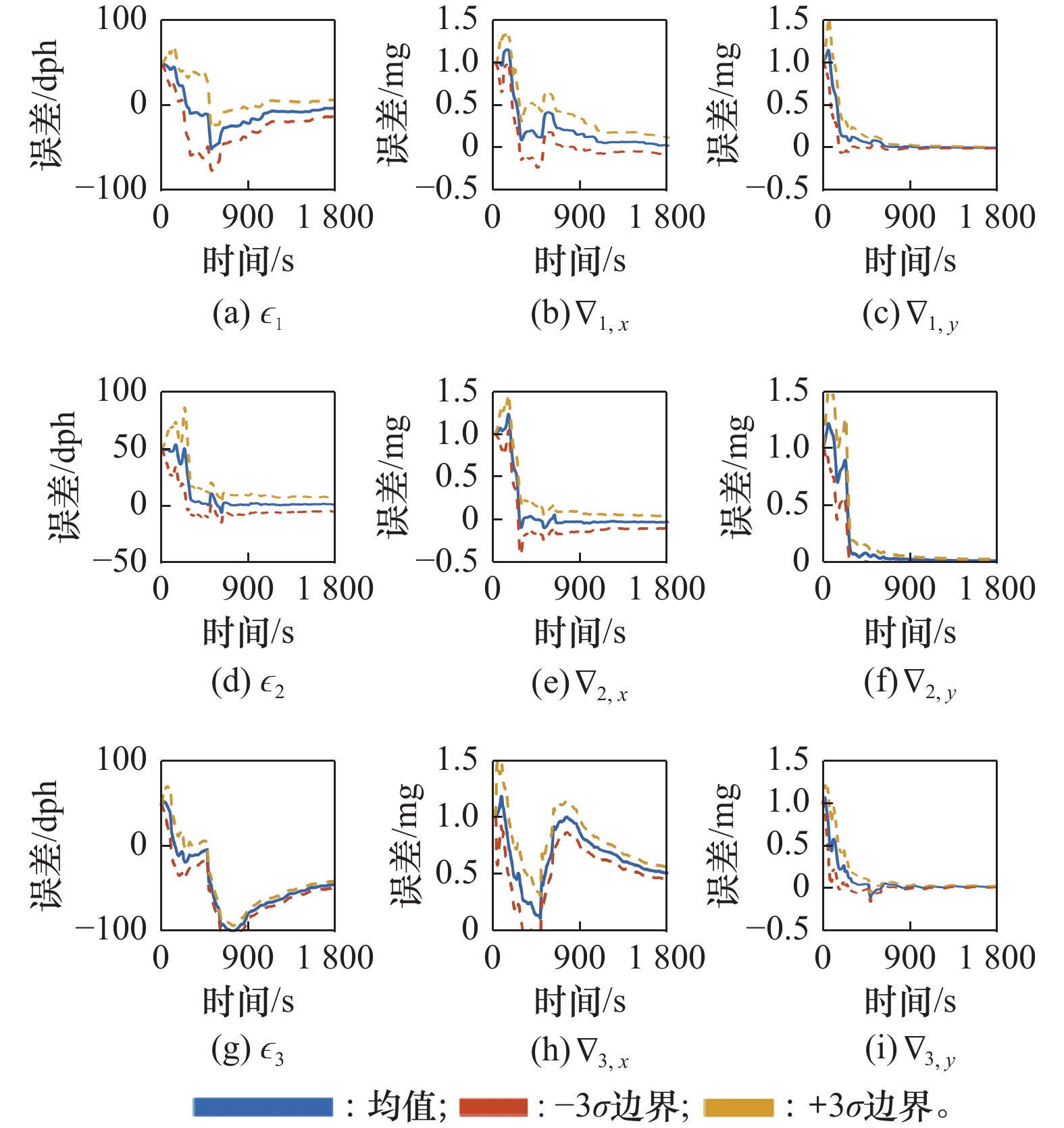
Fig.11
Estimation error on constant deviation of inertial device when theoretically observable"
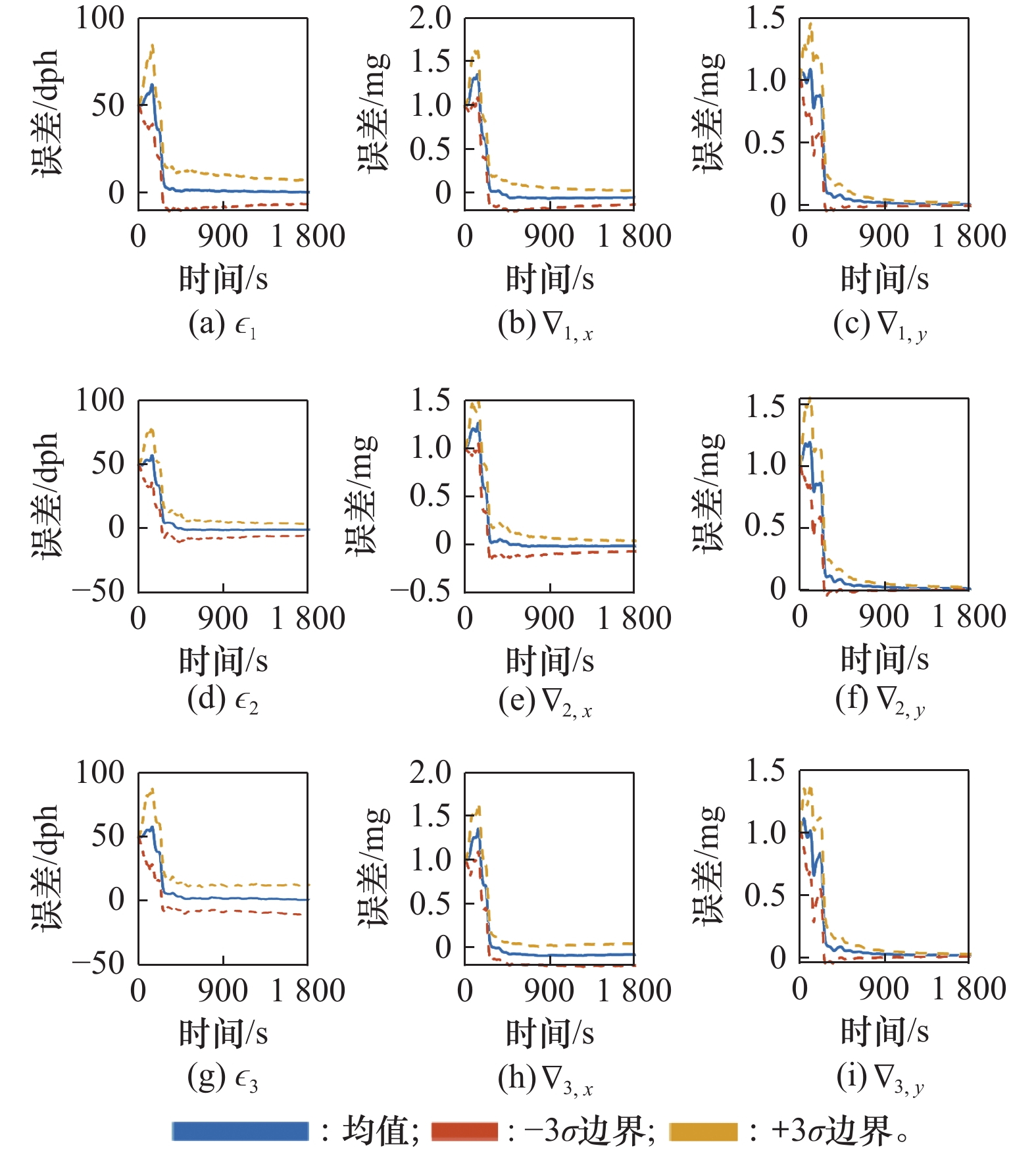

Fig.12
Estimation error of pitot tube constant error and heading difference when theoretically observable"
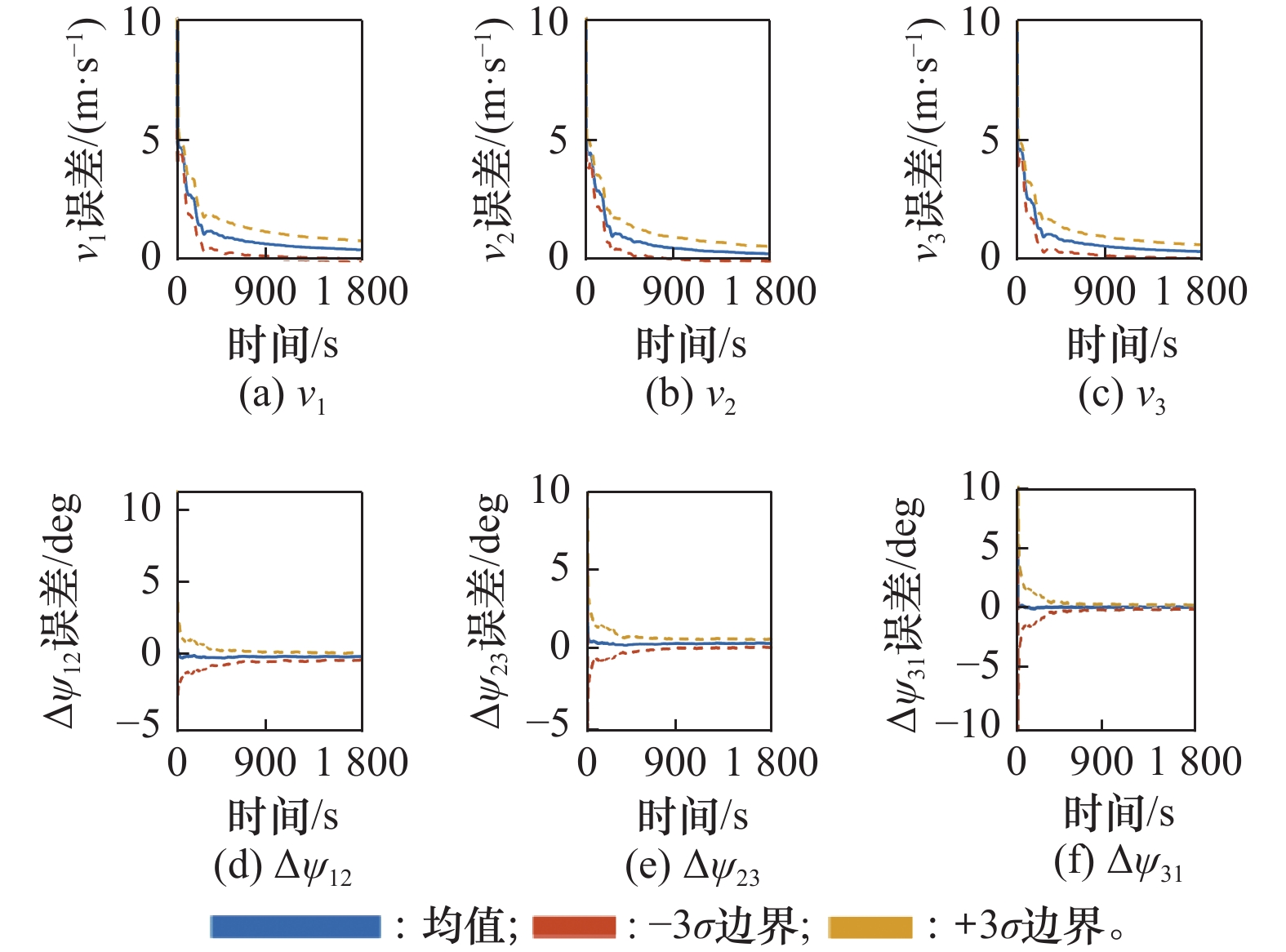
Table 3
Comparison of estimation errors after introducing consistency constraints"
| 参数 | 坐标轴 | 均值 | 标准差 | |||
| UKF | CUKF | UKF | CUKF | |||
| 位置/m | x轴 | 0.040 | −0.002 | 1.711 | 1.405 | |
| y轴 | 0.013 | −0.022 | 2.061 | 1.652 | ||
| 速度/(m/s) | x轴 | 0.001 | 0.001 | 0.097 | 0.089 | |
| y轴 | −0.413 | −0.410 | 0.147 | 0.129 | ||
| 航向角差/(º) | — | −0.005 | −0.004 | 0.102 | 0.090 | |
| 陀螺仪/(º/h) | — | 2.562 | 1.441 | 4.006 | 3.049 | |
| 加速度计/mg | x轴 | −0.031 | −0.018 | 0.045 | 0.035 | |
| y轴 | 0.012 | 0.011 | 0.007 | 0.007 | ||
| 空速管/(m/s) | — | 0.392 | 0.390 | 0.141 | 0.123 | |
Table 4
Comparison of standard deviations of estimation errors for different measurement schemes"
| 参数 | 坐标轴 | 方案A | 方案B | 方案C | 方案D |
| 位置/m | x轴 | 1.725 | 1.405 | 1.380 | 1.654 |
| y轴 | 1.799 | 1.652 | 1.312 | 1.653 | |
| 速度/(m/s) | x轴 | 0.092 | 0.089 | 0.089 | 0.091 |
| y轴 | 0.134 | 0.129 | 0.128 | 0.132 | |
| 航向角差/(º) | — | 0.108 | 0.090 | 0.078 | 0.064 |
| 陀螺仪/(º/h) | — | 2.635 | 3.049 | 3.689 | 3.713 |
| 加速度计/mg | x轴 | 0.032 | 0.035 | 0.041 | 0.040 |
| y轴 | 0.007 | 0.007 | 0.007 | 0.007 | |
| 空速管/(m/s) | — | 0.128 | 0.123 | 0.122 | 0.127 |
Table 5
Sensor sensitivity analysis"
| 参数 | 位置 | 速度 | 航向角 | 陀螺仪 | 加速度计 | 空速管 |
| 距离 | √ | — | √ | — | — | √ |
| 方位角 | √ | — | √ | — | — | — |
| 航向角 | √ | — | √ | — | — | — |
| 空速管 | √ | √ | — | — | — | √ |
| 陀螺仪 | √ | — | — | √ | — | — |
| 加速度计 | √ | — | — | — | √ | — |
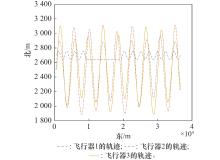
Fig.13
Complex trajectories mixing theoretically unobservable situations"

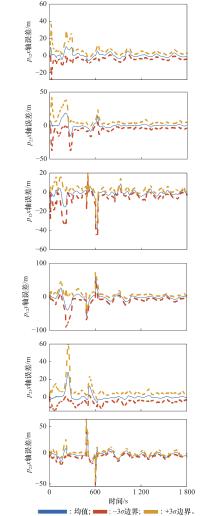
Fig.14
Estimation error of relative position using complex trajectories"
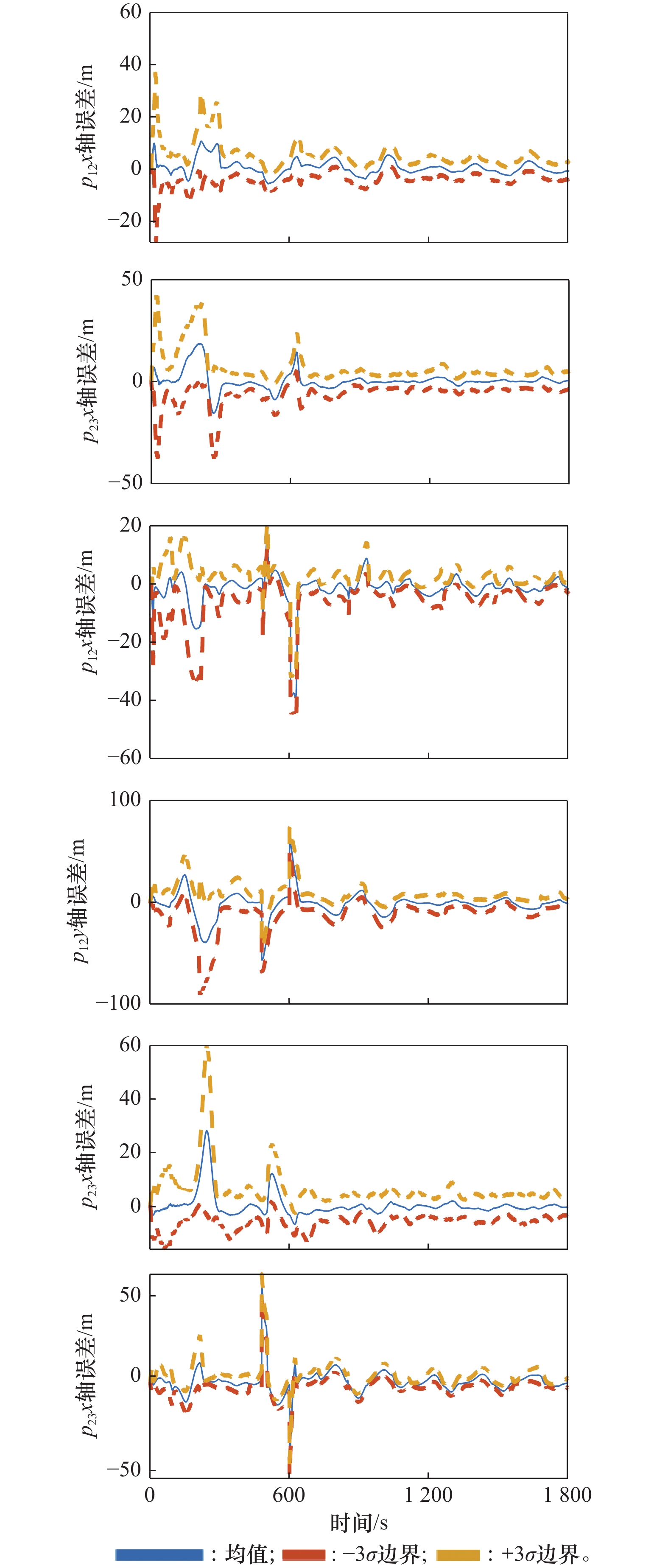

Fig.15
Estimation error on constant deviation of inertial device using complex trajectories"
| 1 |
CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Trans. on Robotics, 2018, 34 (4): 837- 855.
doi: 10.1109/TRO.2018.2857475 |
| 2 | 王建峰, 贾高伟, 郭正, 等. 多无人机协同任务规划方法研究综述[J]. 系统工程与电子技术, 2024, 46 (10): 3437- 3450. |
| WANG J F, JIA G W, GUO Z, et al. Review of research on multi-UAV collaborative mission planning method[J]. Systems Engineering and Electronics, 2024, 46 (10): 3437- 3450. | |
| 3 | ZHANG Y, MEHRJERDI H. A survey on multiple unmanned vehicles formation control and coordination: normal and fault situations[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2013: 1087−1096. |
| 4 | VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3 (20): eaat3536. |
| . [J]. 2018, 3 (20): eaat3536. | |
| 5 | PREISS J A, HONIG W, SUKHATME G S, et al. Crazyswarm: a large nano-quadcopter swarm[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2017: 3299−3304. |
| PREISS J A, HONIG W, SUKHATME G S, et al. Crazyswarm: a large nano-quadcopter swarm[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2017: 3299−3304. | |
| 6 | 许睿, 岳帅, 唐瑞琪, 等. 欺骗环境下GNSS信号估计与定位修正技术[J]. 航空学报, 2020, 41 (10): 303- 310. |
| XU R, YUE S, TANG R Q, et al. GNSS signal estimation and position correction algorithm under spoofing attacks[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (10): 303- 310. | |
| 7 | SHALABY M A, COSSETTE C C, FORBES J R, et al. Calibration and uncertainty characterization for ultra-wideband two-way-ranging measurements[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2023: 4128−4134. |
| 8 |
谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44 (3): 967- 976.
doi: 10.12305/j.issn.1001-506X.2022.03.29 |
|
GU X P, TANG D Q. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm[J]. Systems Engineering and Electronics, 2022, 44 (3): 967- 976.
doi: 10.12305/j.issn.1001-506X.2022.03.29 |
|
| 9 |
COPPOLA M, MCGUIRE K N, DE WAGTER C, et al. A survey on swarming with micro air vehicles: fundamental challenges and constraints[J]. Frontiers in Robotics and AI, 2020, 7, 18.
doi: 10.3389/frobt.2020.00018 |
| 10 |
XU H, ZHANG Y C, ZHOU B Y, et al. Omni-swarm: a decentralized omnidirectional visual-inertial-UWB state estimation system for aerial swarms[J]. IEEE Trans. on Robotics, 2022, 38 (6): 3374- 3394.
doi: 10.1109/TRO.2022.3182503 |
| 11 | LEISHMAN R C, MCLAIN T W, BEARD R W. Relative navigation approach for vision-based aerial GPS-denied navigation[J]. Journal of Intelligent & Robotic Systems, 2014, 74 (1): 97- 111. |
| 12 | NGUYEN T M, NGUYEN T H, CAO M, et al. Integrated UWB-vision approach for autonomous docking of UAVs in GPS-denied environments[C]//Proc. of the International Conference on Robotics and Automation, 2019: 9603−9609. |
| NGUYEN T M, NGUYEN T H, CAO M, et al. Integrated UWB-vision approach for autonomous docking of UAVs in GPS-denied environments[C]//Proc. of the International Conference on Robotics and Automation, 2019: 9603−9609. | |
| 13 |
XU S, LI Q, WU L H, et al. Research on collaborative localization technology of UAVs based on INS and UWB[J]. Journal of Physics: Conference Series, 2024, 2764 (1): 012093.
doi: 10.1088/1742-6596/2764/1/012093 |
| 14 |
SHALABY M, COSSETTE C C, FORBES J R, et al. Relative position estimation in multi-agent systems using attitude-coupled range measurements[J]. IEEE Robotics and Automation Letters, 2021, 6 (3): 4955- 4961.
doi: 10.1109/LRA.2021.3067253 |
| 15 |
GULER S, YILDIRIM I E. A distributed relative localization approach for air-ground robot formations with onboard sensing[J]. Control Engineering Practice, 2023, 135, 105492.
doi: 10.1016/j.conengprac.2023.105492 |
| 16 |
BURCHETT B T. Unscented Kalman filters for range-only cooperative localization of swarms of munitions in three-dimensional flight[J]. Aerospace Science and Technology, 2019, 85, 259- 269.
doi: 10.1016/j.ast.2018.12.015 |
| 17 |
RAJAN R T, LEUS G, VAN DER VEEN A J. Joint relative position and velocity estimation for an anchorless network of mobile nodes[J]. Signal Processing, 2015, 115, 66- 78.
doi: 10.1016/j.sigpro.2015.02.023 |
| 18 |
LIU W Y, LUO X Y, WEI G, et al. Node localization algorithm for wireless sensor networks based on static anchor node location selection strategy[J]. Computer Communications, 2022, 192, 289- 298.
doi: 10.1016/j.comcom.2022.06.010 |
| 19 |
JIANG P Y, ZHENG C Y, KE Q C, et al. Robust cooperative localization using peer-to-peer ranging measurements[J]. Peer-to-Peer Networking and Applications, 2023, 16 (5): 2103- 2112.
doi: 10.1007/s12083-023-01525-6 |
| 20 |
PFEIFFER S, MUNARO V, LI S, et al. Three-dimensional relative localization and synchronized movement with wireless ranging[J]. Swarm Intelligence, 2023, 17 (1/2): 147- 172.
doi: 10.1007/s11721-022-00221-0 |
| 21 | VAN DER HELM S, COPPOLA M, MCGUIRE K N, et al. On-board range-based relative localization for micro air vehicles in indoor leader–follower flight[J]. Autonomous Robots, 2020, 44 (3): 415- 441. |
| 22 |
GONG B C, WANG S, HAO M R, et al. Range-based collaborative relative navigation for multiple unmanned aerial vehicles using consensus extended Kalman filter[J]. Aerospace Science and Technology, 2021, 112, 106647.
doi: 10.1016/j.ast.2021.106647 |
| 23 | 许晓伟, 赖际舟, 吕品, 等. 多无人机协同导航技术研究现状及进展[J]. 导航定位与授时, 2017, 4 (4): 1- 9. |
| XU X W, LAI J Z, LV P, et al. A literature review on the research status and progress of cooperative navigation technology for multiple UAVs[J]. Navigation Positioning and Timing, 2017, 4 (4): 1- 9. | |
| 24 |
DU M, ZOU H, WANG T, et al. A cooperative target localization method based on UAV aerial images[J]. Aerospace, 2023, 10 (11): 943.
doi: 10.3390/aerospace10110943 |
| 25 | 郭鹏军, 张睿, 高关根, 等. 基于相对速度和位置辅助的无人机编队协同导航[J]. 上海交通大学学报, 2022, 56 (11): 1438- 1446. |
| GUO P J, ZHANG R, GAO G G, et al. Cooperative navigation of UAV formation based on relative velocity and position assistance[J]. Journal of Shanghai Jiao Tong University, 2022, 56 (11): 1438- 1446. | |
| 26 |
NGUYEN N H, DOGANCAY K. Improved pseudolinear kalman filter algorithms for bearings-only target tracking[J]. IEEE Trans. on Signal Processing, 2017, 65 (23): 6119- 6134.
doi: 10.1109/TSP.2017.2749207 |
| 27 | 严恭敏. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| YAN G M. Strapdown inertial navigation algorithms and integrated navigation principles[M]. Xi’an: Northwestern Polytechnical University Press, 2019. | |
| 28 | YU Z S, CUI P Y, ZHU S Y. Observability-based beacon configuration optimization for Mars entry navigation[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (4): 643- 650. |
| 29 |
HEINTZMAN L, WILLIAMS R K. Nonlinear observability of unicycle multi-robot teams subject to nonuniform environmental disturbances[J]. Autonomous Robots, 2020, 44 (7): 1149- 1166.
doi: 10.1007/s10514-020-09923-y |
| 30 | WANG J, BUTCHER E A, TANSEL Y. Space-based relative orbit estimation using information sharing and the consensus Kalman filter[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (3): 491- 507. |
| 31 |
ZHENG Z X, WANG S, GONG B C, et al. Study on angle-only relative navigation for unmanned aerial vehicle formation in GPS-denied environment[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237 (10): 2252- 2265.
doi: 10.1177/09544100221149235 |
| [1] | Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830. |
| [2] | Ronghua DU, Xiang ZHANG, Wenhe LIAO. Fast initial relative orbit determination method of angles-only relative navigation [J]. Systems Engineering and Electronics, 2021, 43(4): 1057-1068. |
| [3] | Yu LU, Zheng ZHOU. Observability analysis of airborne external transmitter location system [J]. Systems Engineering and Electronics, 2020, 42(6): 1241-1247. |
| [4] | Lei BAO, Chunyang WANG, Juan BAI, Huiyong ZENG. Influence of blinking jamming of dual stealth aircraft on the performance of monopulse radar [J]. Systems Engineering and Electronics, 2020, 42(3): 589-596. |
| [5] | Guanglei MENG, Mingzhe ZHOU, Haiyin PIAO, Huimin ZHANG. Threat assessment method of dual-aircraft formation based on cooperative tactical recognition [J]. Systems Engineering and Electronics, 2020, 42(10): 2285-2293. |
| [6] | CHENG Jian-hua, CHEN Dai-dai, WANG Bing-yu, WANG Tong-da. Approach of transfer alignment accuracy evaluation based on observability degree analysis [J]. Systems Engineering and Electronics, 2015, 37(4): 895-900. |
| [7] | GUO Xiaosong1, WANG Jie1, ZHOU Zhaofa1, WEI Wanning2. Measurement augmentation based fast initial alignment of SINS [J]. Systems Engineering and Electronics, 2014, 36(7): 1392-1396. |
| [8] | QI Zhao,WANG Qiu-ying,GUO Hang-hang. Observability analysis and research on the on-line calibration technique for modulated strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2014, 36(5): 965-972. |
| [9] | YANG Haiyan, TANG Guojian. Target visibility and measure precision analysis of stereo vision systems [J]. Journal of Systems Engineering and Electronics, 2012, 34(9): 1889-1894. |
| [10] | ZHAO Wen-fang, ZHAO Wei, QIAN Wei-xing, LIU Jian-ye. Initial alignment of SINS based on the continuous rotation of the azimuth axis [J]. Journal of Systems Engineering and Electronics, 2009, 31(4): 934-937. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||