Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (9): 2699-2706.doi: 10.12305/j.issn.1001-506X.2022.09.01
• Electronic Technology • Next Articles
Moving underwater vehicle localization with uncertain sound speed
Tianyi JIA1,2,*, Jingjie GAO3, Xiaohong SHEN2, Hongwei LIU1
- 1. National Lab of Radar Signal Processing, Xidian University, Xi'an 710071, China
2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China
3. School of Information Engineering, Chang'an University, Xi'an 710064, China
-
Received:2021-11-05Online:2022-09-01Published:2022-09-01 -
Contact:Tianyi JIA
CLC Number:
Cite this article
Tianyi JIA, Jingjie GAO, Xiaohong SHEN, Hongwei LIU. Moving underwater vehicle localization with uncertain sound speed[J]. Systems Engineering and Electronics, 2022, 44(9): 2699-2706.
share this article

Fig.1
Localization scenario of a moving vehicle"

Table 1
Positions of transponders m"
| 应答器编号 | 应答器坐标 | |||
| x | y | z | ||
| 1 | 350 | 200 | 120 | |
| 2 | 900 | 250 | 60 | |
| 3 | 700 | 700 | 100 | |
| 4 | 250 | 1 000 | 110 | |
| 5 | 1 400 | 1 200 | 80 | |
| 6 | 1 000 | 800 | 90 | |
| 7 | 700 | 1 200 | 100 | |
| 8 | 1 200 | 500 | 0 | |
| 9 | 500 | 900 | 0 | |

Fig.2
The output distribution of different methods obtained from 500 Monte Carlo simulations"
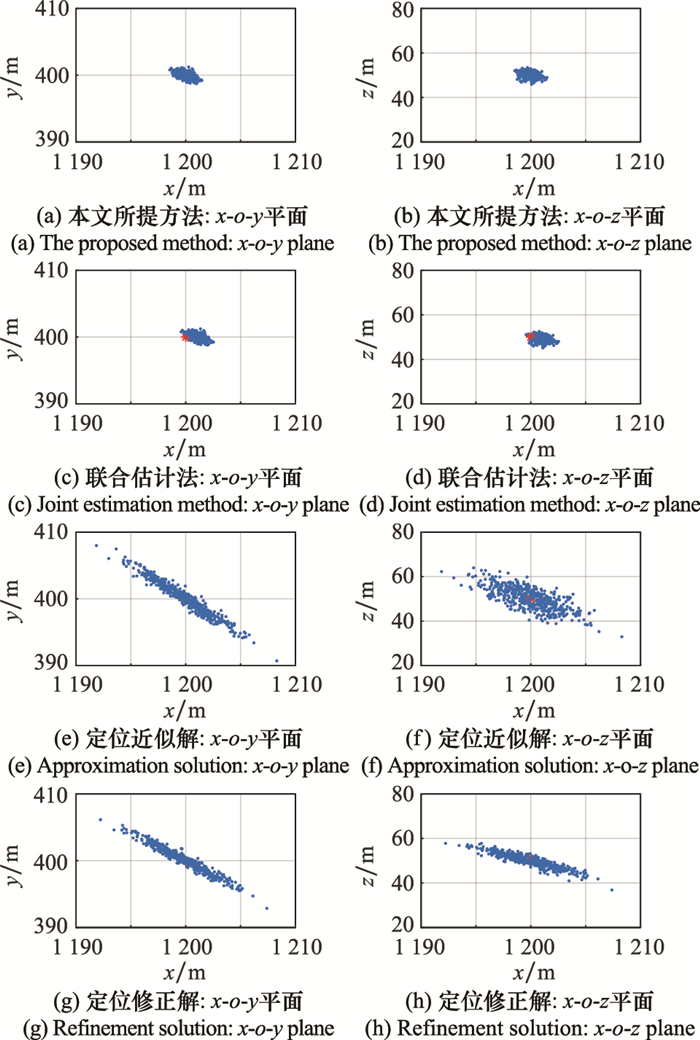
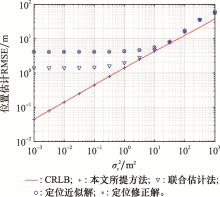
Fig.3
Effect of range measurement variance to localization performance"
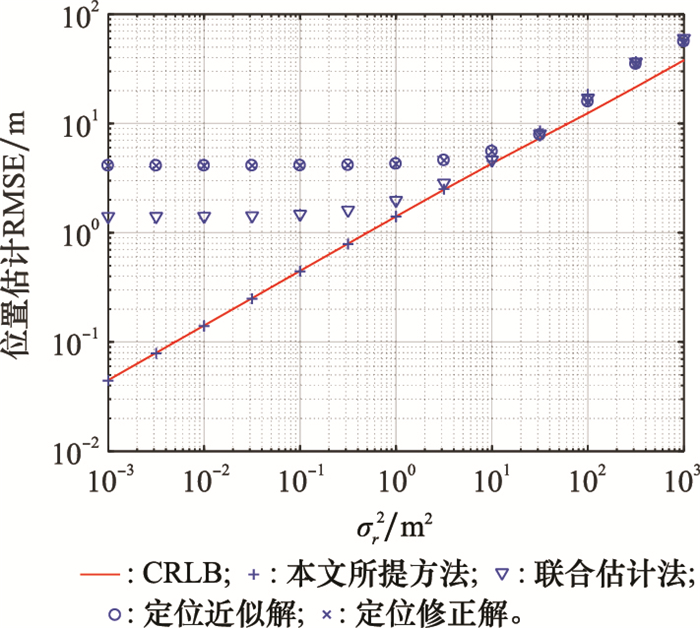
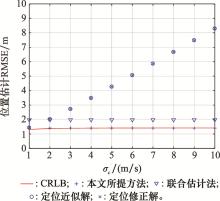
Fig.4
Effect of sound speed standard deviation to localization performance"
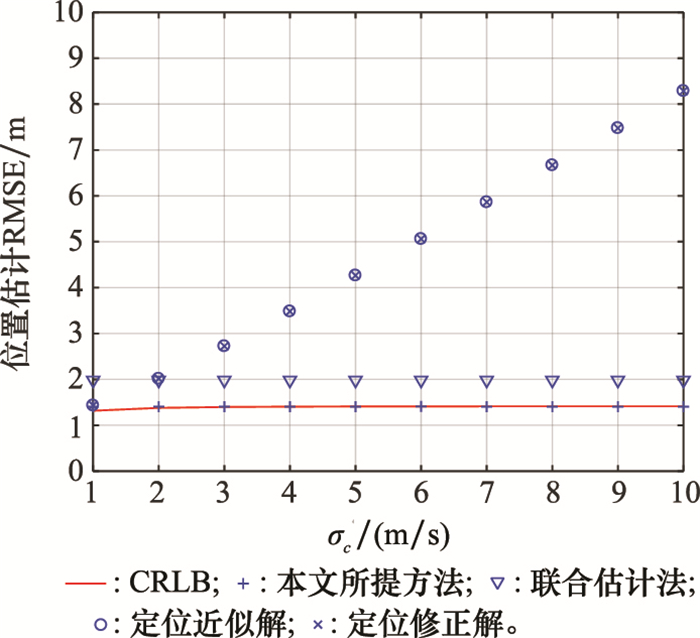
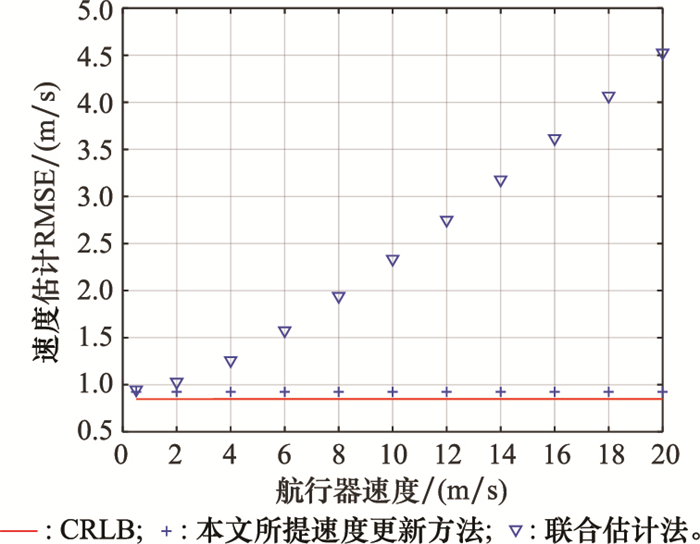
Fig.5
Effect of vehicle motion speed to localization performance"
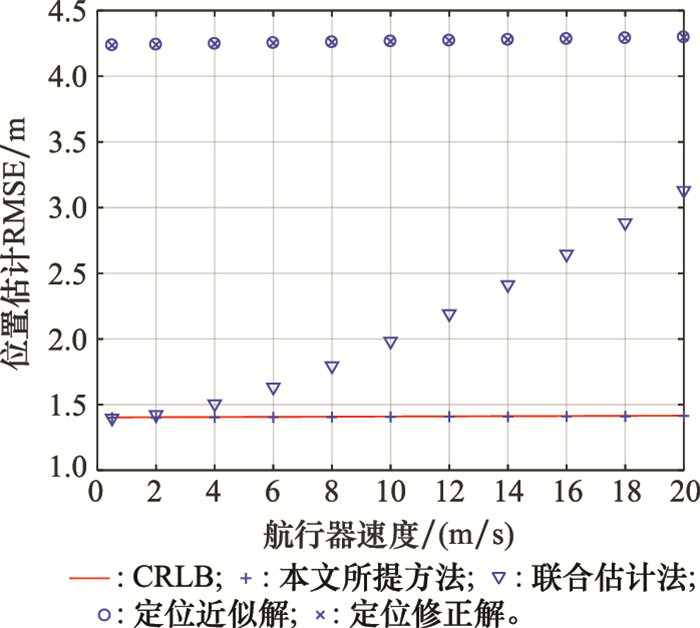
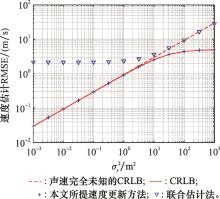
Fig.6
Effect of range measurement variance to sound speed update"
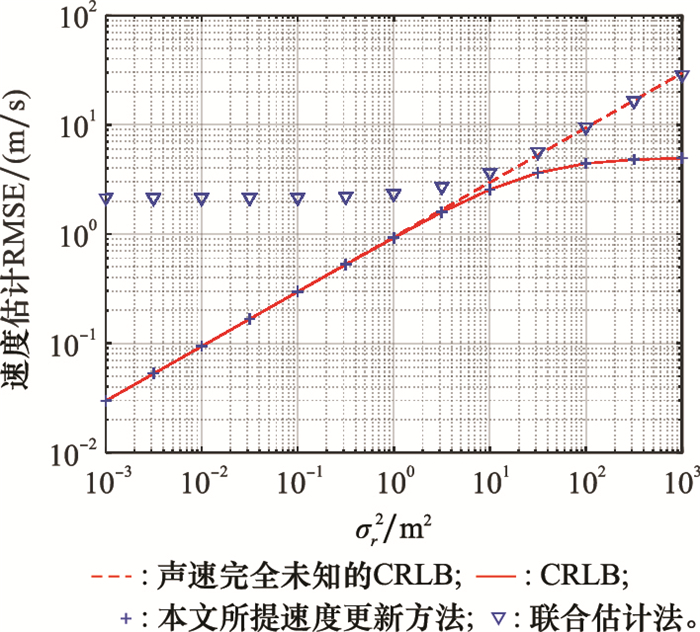
Fig.7
Effect of sound speed standard deviation to sound speed update"
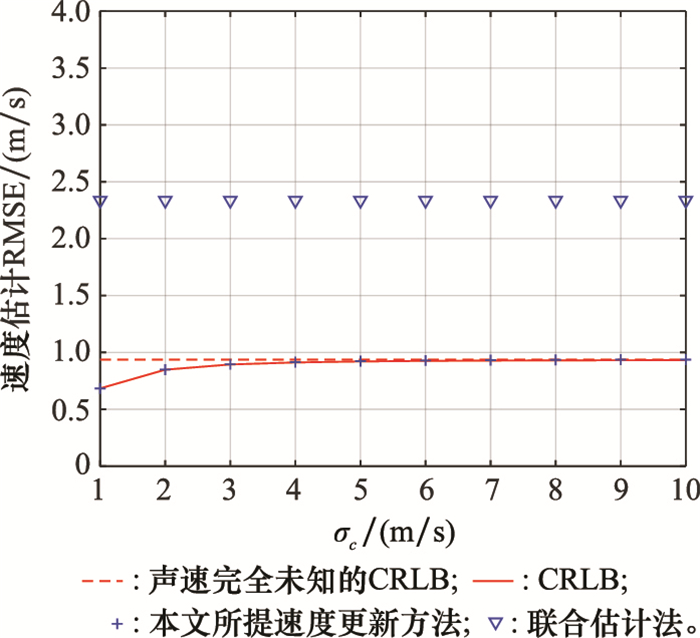
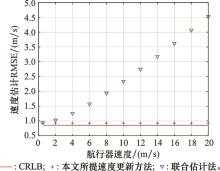
Fig.8
Effect of vehicle motion speed to sound speed update"
| 1 |
JIA T Y , HO K C , WANG H Y , et al. Effect of sensor motion on time delay and Doppler shift localization: analysis and solution[J]. IEEE Trans.on Signal Processing, 2019, 67 (22): 5881- 5895.
doi: 10.1109/TSP.2019.2946025 |
| 2 | 孙大军, 郑翠娥, 崔宏宇, 等. 水下传感器网络定位技术发展现状及若干前沿问题[J]. 中国科学: 信息科学, 2018, 48 (9): 1121- 1136. |
| SUN D J , ZHENG C E , CUI H Y , et al. Developing status and some cutting-edge issues of underwater sensor network localization technology[J]. Scientia Sinica Informationis, 2018, 48 (9): 1121- 1136. | |
| 3 |
JIA T Y , WANG H Y , SHEN X H , et al. Target localization based on structured total least squares with hybrid TDOA-AOA measurements[J]. Signal Processing, 2018, 143, 211- 221.
doi: 10.1016/j.sigpro.2017.09.011 |
| 4 |
YAN J , ZHAO H Y , WANG Y Y , et al. Asynchronous localization for UASNs: an unscented transform-based method[J]. IEEE Signal Processing Letters, 2019, 26 (4): 602- 606.
doi: 10.1109/LSP.2019.2902273 |
| 5 |
YAN J , GONG Y D , CHEN C L , et al. AUV-aided localization for internet of underwater things: a reinforcement-learning-based method[J]. IEEE Internet of Things Journal, 2020, 7 (10): 9728- 9746.
doi: 10.1109/JIOT.2020.2993012 |
| 6 |
YANG R , BAR-SHALOM Y , HUANG H A J , et al. UGHF for acoustic tracking with state-dependent propagation delay[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 51 (3): 1747- 1761.
doi: 10.1109/TAES.2015.140386 |
| 7 | 赵晨, 乔钢, 周锋. 基于正交移动双水下自主潜航器的水下合作目标定位方法[J]. 电子与信息学报, 2021, 43 (3): 834- 841. |
| ZHAO C , QIAO G , ZHOU F . Underwater cooperative target localization method based on double orthogonal moving autonomous underwater vehicles[J]. Journal of Electronics & Information Technology, 2021, 43 (3): 834- 841. | |
| 8 |
PAULL L , SAEEDI S , SETO M , et al. AUV navigation and localization: a review[J]. IEEE Journal of Oceanic Engineering, 2014, 39 (1): 131- 149.
doi: 10.1109/JOE.2013.2278891 |
| 9 | ZOU Y B , LIU H P , WAN Q . Joint synchronization and localization in wireless sensor networks using semidefinite programming[J]. IEEE Internet of Things Journal, 2017, 5 (1): 199- 205. |
| 10 |
HAO B J , HO K C , LI Z . Range-based rigid body localization with a calibration emitter for mitigating anchor position uncertainties[J]. IEEE Trans.on Wireless Communications, 2019, 18 (12): 5734- 5748.
doi: 10.1109/TWC.2019.2938761 |
| 11 | YANG L , HO K C . Alleviating sensor position error in source localization using calibration emitters at inaccurate locations[J]. IEEE Trans.on Signal Processing, 2009, 58 (1): 67- 83. |
| 12 | 高婧洁, 申晓红, 王海燕. 单锚节点水声网络高精度低开销初始化方法[J]. 系统工程与电子技术, 2017, 39 (2): 425- 430. |
| GAO J J , SHEN X H , WANG H Y . Initialization method for underwater acoustic networks with one anchor[J]. Systems Engineering and Electronics, 2017, 39 (2): 425- 430. | |
| 13 |
JIA T Y , HO K C , WANG H Y , et al. Localization of a moving object with sensors in motion by time delays and Doppler shifts[J]. IEEE Trans.on Signal Processing, 2020, 68, 5824- 5841.
doi: 10.1109/TSP.2020.3023972 |
| 14 |
GAO S C , ZHANG S J , WANG G , et al. Robust second-order cone relaxation for TW-TOA-based localization with clock imperfection[J]. IEEE Signal Processing Letters, 2016, 23 (8): 1047- 1051.
doi: 10.1109/LSP.2016.2580743 |
| 15 |
JIA T Y , SHEN X H , WANG H Y . Multistatic sonar localization with a transmitter[J]. IEEE Access, 2019, 7, 111192- 111203.
doi: 10.1109/ACCESS.2019.2934737 |
| 16 |
TOMIC S , BEKO M . Exact robust solution to TW-ToA-based target localization problem with clock imperfections[J]. IEEE Signal Processing Letters, 2018, 25 (4): 531- 535.
doi: 10.1109/LSP.2018.2810829 |
| 17 | THOMSON D, DOSSO S. AUV localization in an underwater acoustic positioning system[C]//Proc. of the IEEE Oceans, 2013: 1-6. |
| 18 |
ZHANG J C , HAN Y F , ZHENG C E , et al. Underwater target localization using long baseline positioning system[J]. Applied Acoustics, 2016, 111, 129- 134.
doi: 10.1016/j.apacoust.2016.04.009 |
| 19 | NEWMAN P, LEONARD J. Pure range-only sub-sea SLAM[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2003: 1921-1926. |
| 20 |
ZHANG J C , SHI C H , SUN D J , et al. High-precision, limited-beacon-aided AUV localization algorithm[J]. Ocean Engineering, 2018, 149, 106- 112.
doi: 10.1016/j.oceaneng.2017.12.003 |
| 21 |
LI Z , DOSSO S E , SUN D J . Motion compensated acoustic localization for underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 2016, 41 (4): 840- 851.
doi: 10.1109/JOE.2015.2503518 |
| 22 | JIA T Y, HO K C, WANG H Y, et al. Accurate localization of AUV in motion by explicit solution using time delays[C]//Proc. of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2020: 4871-4875. |
| 23 | 封金星, 丁士圻, 惠俊英. 水下运动目标长基线定位解算研究[J]. 声学学报, 1996, 21 (5): 832- 837. |
| FENG J X , DING S Q , HUI J Y . A solution of locating a moving object using long-base line acoustic system[J]. Acta Acustica, 1996, 21 (5): 832- 837. | |
| 24 |
JIA T Y , WANG H Y , SHEN X X , et al. Accurate closed-form solution for moving underwater vehicle localization using two-way travel time[J]. Electronics, 2020, 9 (4): 565.
doi: 10.3390/electronics9040565 |
| 25 |
ZHENG J , LUI K W , SO H C . Accurate three-step algorithm for joint source position and propagation speed estimation[J]. Signal Processing, 2007, 87 (12): 3096- 3100.
doi: 10.1016/j.sigpro.2007.06.014 |
| 26 |
ZHANG B B , HU Y C , WANG H Y , et al. Underwater source localization using TDOA and FDOA measurements with unknown propagation speed and sensor parameter errors[J]. IEEE Access, 2018, 6, 36645- 36661.
doi: 10.1109/ACCESS.2018.2852636 |
| 27 |
MAHAJAN A , WALWORTH M . 3D position sensing using the differences in the time-of-flights from a wave source to various receivers[J]. IEEE Trans.on Robotics and Automation, 2001, 17 (1): 91- 94.
doi: 10.1109/70.917087 |
| 28 |
HE C F , WANG Y Y , CHEN C L , et al. Target localization for a distributed SIMO sonar with an isogradient sound speed profile[J]. IEEE Access, 2018, 6, 29770- 29783.
doi: 10.1109/ACCESS.2018.2843438 |
| 29 | RAMEZANI H , JAMALI R H , LEUS G . Target localization and tracking for an isogradient sound speed profile[J]. IEEE Trans.on Signal Processing, 2012, 61 (6): 1434- 1446. |
| 30 |
YAN J , ZHAO H Y , WANG Y Y , et al. Asynchronous localization for UASNs: an unscented transform-based method[J]. IEEE Signal Processing Letters, 2019, 26 (4): 602- 606.
doi: 10.1109/LSP.2019.2902273 |
| [1] | Hai LI, Weijie CHENG, Ruijie XIE. Wind speed estimation of low-altitude wind-shear based on homotopy sparse STAP [J]. Systems Engineering and Electronics, 2022, 44(4): 1174-1181. |
| [2] | Yi LIU, Xiaoxiong ZHOU, Guangjun CHENG. High dynamic carrier tracking technology in frequency hopping systems [J]. Systems Engineering and Electronics, 2022, 44(2): 677-683. |
| [3] | Fei YU, Yun YU, Lihui ZHOU, Chunguang PENG. Hyperparameter-free sparse signal direction-of-arrival estimation method with single-snapshot [J]. Systems Engineering and Electronics, 2021, 43(4): 894-900. |
| [4] | Zixuan LONG, Qi ZHOU, Xiafu PENG, Xiaoli ZHANG. Maximum correntropy Kalman filter used for hull deformation measurement in non-Gaussian environment [J]. Systems Engineering and Electronics, 2021, 43(11): 3278-3287. |
| [5] | Donghua HUANG, Yongsheng ZHAO, Yongjun ZHAO. Target localization algorithm from DOA-TDOA measurements in passive radar with transmitter and receiver position errors [J]. Systems Engineering and Electronics, 2020, 42(9): 1961-1968. |
| [6] | Hai LI, Di SONG, Ze HUYAN, Qing FENG, Zibo ZHUANG. Wind speed estimation of low-altitude wind-shear based on TDPC-JDL under LFMCW system [J]. Systems Engineering and Electronics, 2020, 42(7): 1504-1509. |
| [7] | Hai LI, Zhixin LIU, Weijie CHENG, Zibo ZHUANG, Yi FAN. Low-altitude wind shear wind speed estimation method based on MBMC under sea clutter [J]. Systems Engineering and Electronics, 2020, 42(11): 2481-2487. |
| [8] | Yan WANG, Yimin SHI. Statistical analysis of the dependent competing risks model under the double constant-stress accelerated life test [J]. Systems Engineering and Electronics, 2020, 42(11): 2644-2653. |
| [9] | JIANG Yilin, LIU Mengnan, GAO Lipeng, CHEN Tao. Joint passive location method of TDOA and FDOA for moving multi-station [J]. Systems Engineering and Electronics, 2019, 41(7): 1441-1449. |
| [10] | LI Hai, WANG Jie. Low-altitude wind-shear wind speed estimation based on CMCAP [J]. Systems Engineering and Electronics, 2019, 41(3): 529-533. |
| [11] | CHEN Xudan, SUN Xinli, JI Guoxun, LI Zhen. Mis-specification analysis of inverse Gaussian degradation processes model [J]. Systems Engineering and Electronics, 2019, 41(3): 693-700. |
| [12] | CAI Zhongyi, XIANG Huachun, WANG Pan, WANG Zezhou, LI Chao. Missile storage lifetime assessment of multivariate degradation modeling under competition failure [J]. Systems Engineering and Electronics, 2018, 40(5): 1183-1188. |
| [13] | XU Bo, LIU Dezheng, ZHANG Xun. Multiple AUV cooperative navigation algorithm of robust filter based on interacting model [J]. Systems Engineering and Electronics, 2017, 39(9): 2087-2093. |
| [14] | LIU Yanchao, SHI Yimin, SHI Xiaolin. Reliability analysis of four-unit hybrid systems with masked data [J]. Systems Engineering and Electronics, 2017, 39(5): 1183-1188. |
| [15] | JIN Yan, GAO Duo, JI Hongbing. Parameter estimation of LFM signal based on robust S transform in α stable distribution noise [J]. Systems Engineering and Electronics, 2017, 39(4): 693-699. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||