
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (11): 3640-3648.doi: 10.12305/j.issn.1001-506X.2023.11.32
唐洪琼1, 许江宁1, 史文策1,2, 何泓洋1, 李方能1,*
收稿日期:2022-09-30
出版日期:2023-10-25
发布日期:2023-10-31
通讯作者:
李方能
作者简介:唐洪琼 (1994—), 男, 博士研究生, 主要研究方向为导航技术及应用基金资助:Hongqiong TANG1, Jiangning XU1, Wence SHI1,2, Hongyang HE1, Fangneng LI1,*
Received:2022-09-30
Online:2023-10-25
Published:2023-10-31
Contact:
Fangneng LI
摘要:
多普勒计程仪(Doppler velocity log, DVL)能够实时为捷联惯性导航系统(strapdown inertial navigation system, SINS)提供外部速度辅助信息, 准确稳定的DVL标定工作对提升SINS/DVL组合导航系统的性能具有重要意义。为有效解决此问题, 提出了一种基于位置观测信息的Davenport四元数标定方法。在所提方法中, 通过基于多普勒测速原理的位置观测推算标定刻度因子误差以减小速度量测噪声的不利影响, 利用基于Davenport四元数方法的位置观测矢量方程解算标定安装角误差以增强旋转矩阵求解的稳定性。船载湖试结果表明, 相比于现有方法, 所提标定方法在简单和复杂的机动情况下均具有更高的准确度和更好的稳定性。
中图分类号:
唐洪琼, 许江宁, 史文策, 何泓洋, 李方能. 基于位置观测信息的Davenport四元数DVL标定方法[J]. 系统工程与电子技术, 2023, 45(11): 3640-3648.
Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information[J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648.

图1
DVL安装误差示意图"
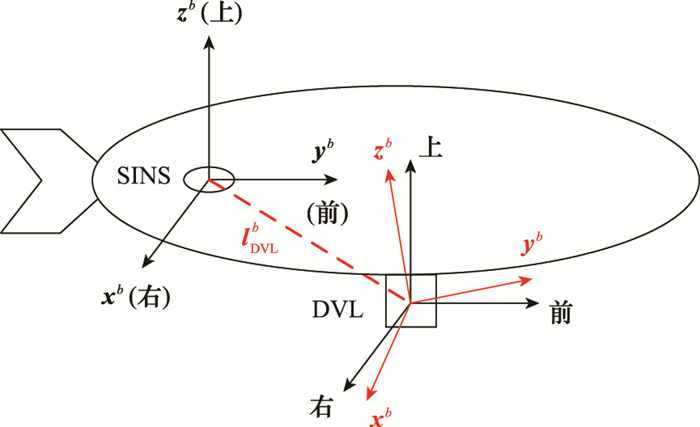
图2
DVL标定系统结构图"
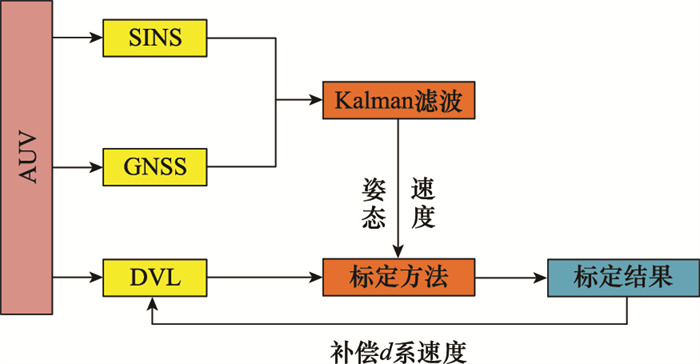
表1
CY-JG90J型SINS的性能参数"
| 参数 | 陀螺仪 | 加速度计 |
| 测量范围 | ±400(°)/s | ±50 g |
| 零偏稳定性 | <0.003(°)/h | <20 μg |
| 随机游走系数 | <0.000 3(°)/h | <5 μg |
| 标度因子重复性/ppm | <2 | <15 |
| 更新频率/Hz | 200 | 200 |
表2
PA600型DVL的性能参数"
| 参数 | 数值 |
| 测量范围/kn | ±12 |
| 长期测量精度/(cm/s) | 0.3%±0.3 |
| 工作频率/kHz | 600 |
| 波束数量 | 4波束相控阵 |
| 最大量测深度/m | 80 |
| 更新频率/Hz | 1 |
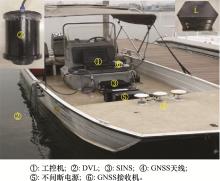
图3
试验平台搭建全景"
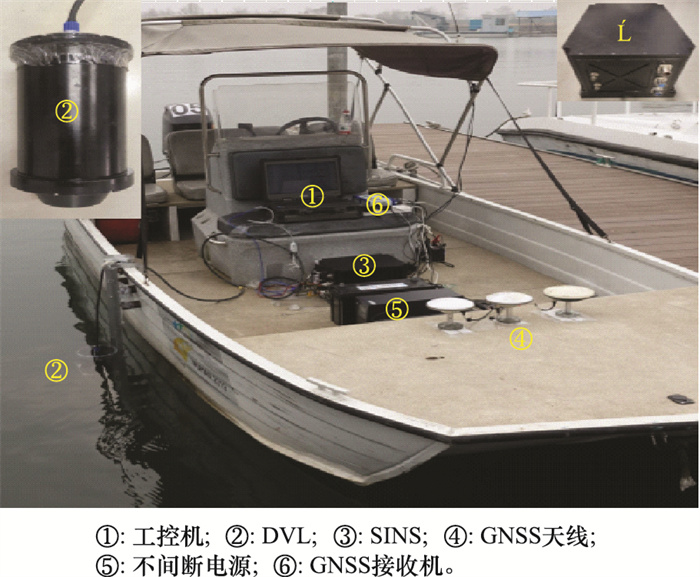
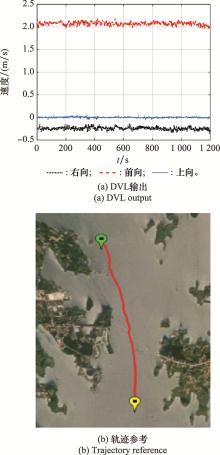
图4
简单机动情况下的DVL原始输出及对应轨迹"
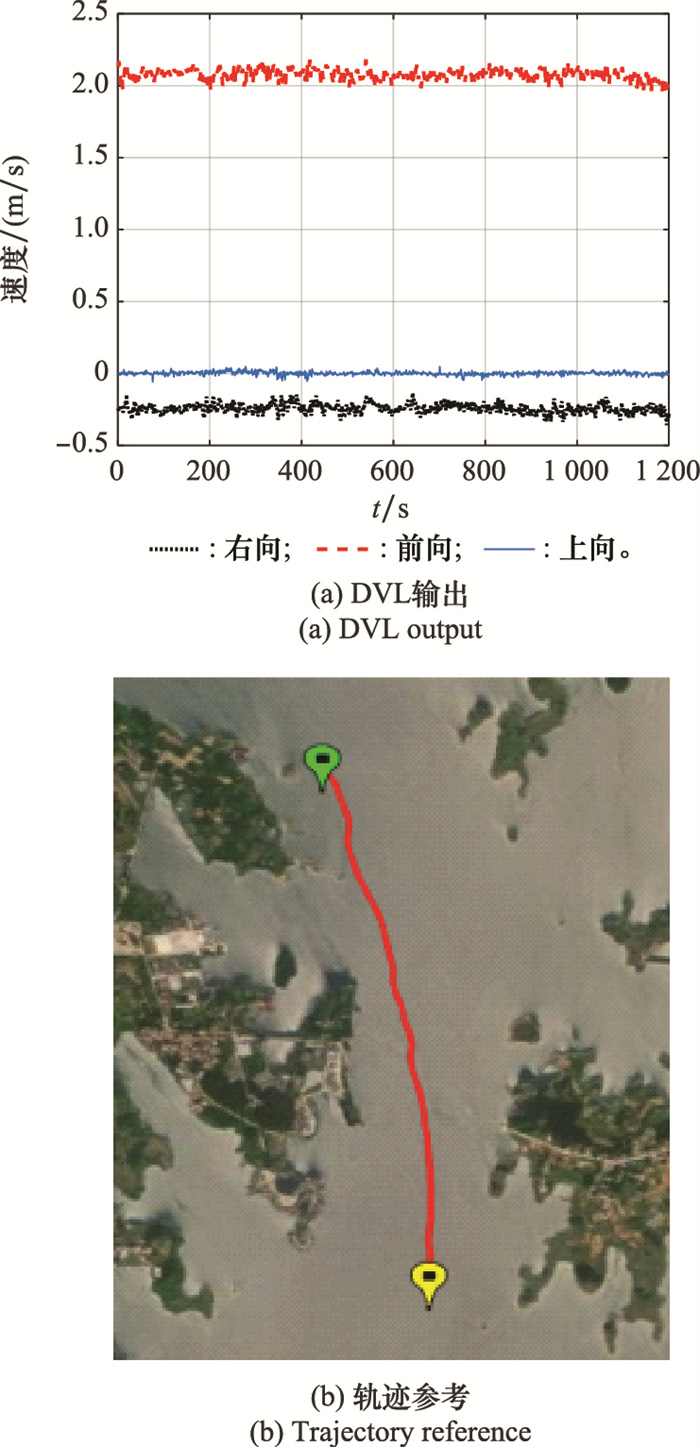

图5
复杂机动情况下的DVL输出及对应轨迹"
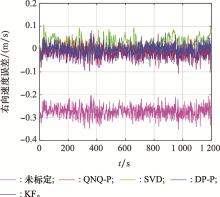
图6
简单机动时右向速度标定误差"
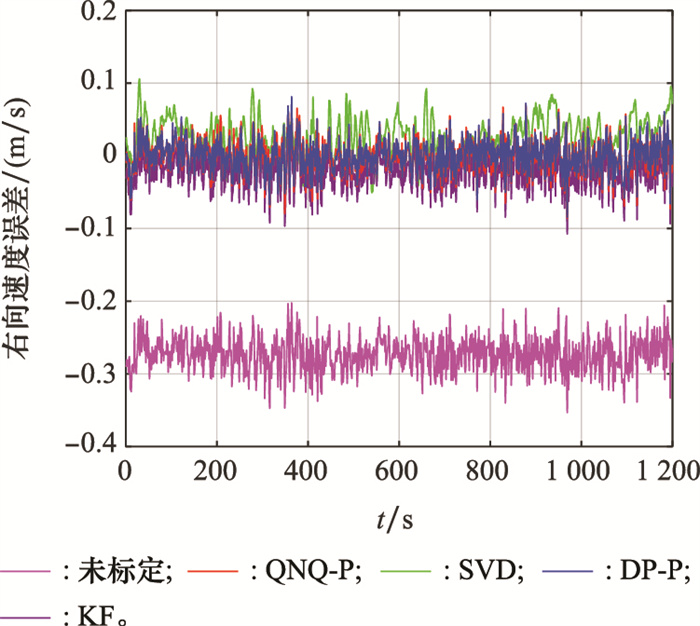
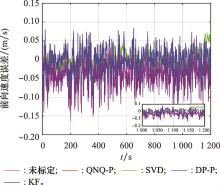
图7
简单机动时前向速度标定误差"
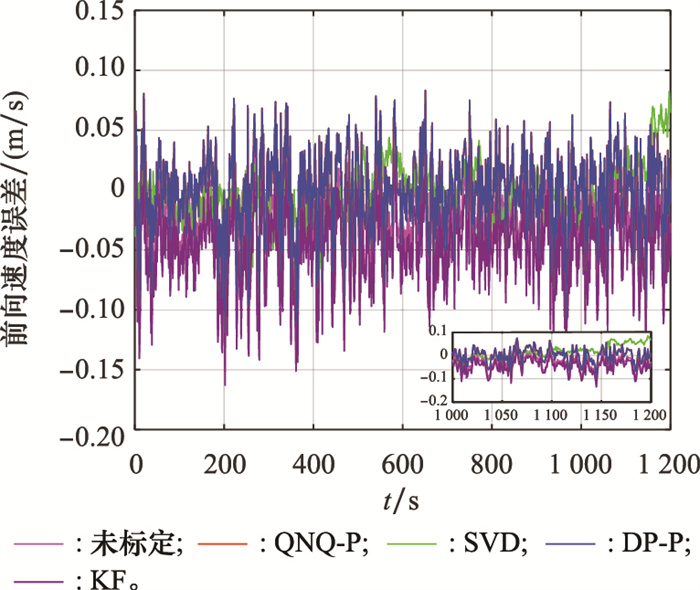
图8
简单机动时上向速度标定误差"
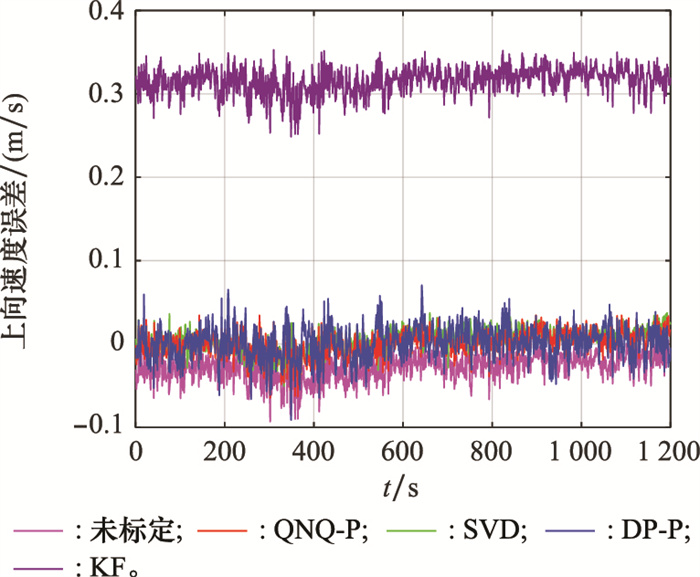
表3
简单机动时不同标定方法速度误差标定结果"
| 方法 | 右向速度误差 | 前向速度误差 | 上向速度误差 | |||||
| MAX | MAE | MAX | MAE | MAX | MAE | |||
| 未标定 | 0.353 | 0.207 | 0.151 | 0.037 | 0.093 | 0.021 | ||
| SVD | 0.106 | 0.028 | 0.083 | 0.017 | 0.051 | 0.012 | ||
| KF | 0.108 | 0.019 | 0.163 | 0.048 | 0.353 | 0.316 | ||
| QNQ-P | 0.086 | 0.016 | 0.119 | 0.025 | 0.065 | 0.012 | ||
| DP-P | 0.085 | 0.015 | 0.118 | 0.025 | 0.091 | 0.015 | ||
图9
简单机动时试验载体轨迹对比图"
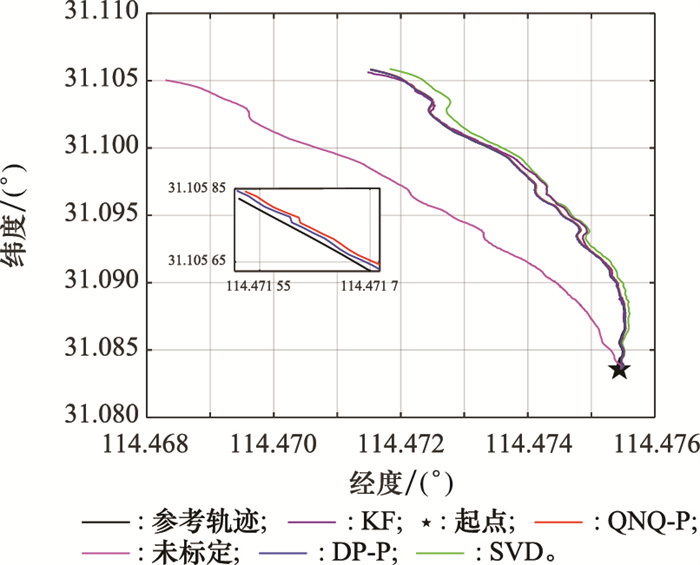
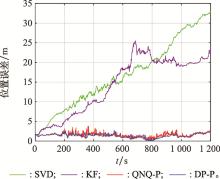
图10
简单机动时位置误差对比图"
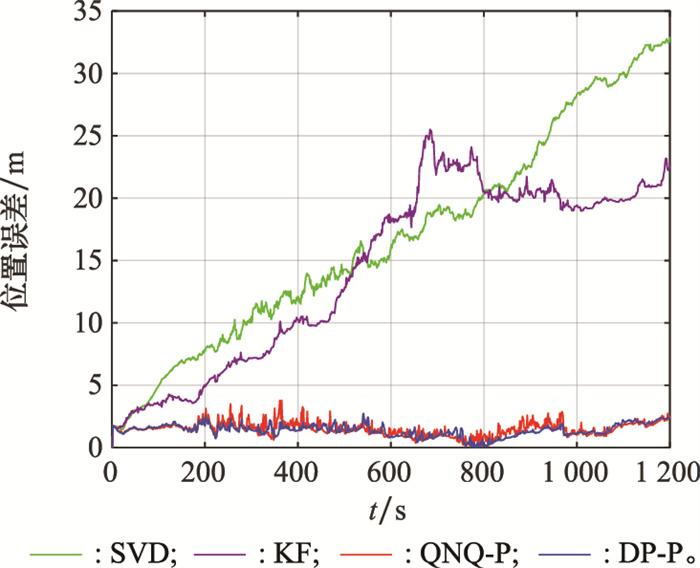
表4
简单机动时位置误差的最大值与平均值"
| 方法 | MAX | MEAN |
| 未标定 | 352.16 | 176.41 |
| SVD | 32.92 | 16.89 |
| KF | 25.51 | 14.35 |
| QNQ-P | 3.77 | 1.50 |
| DP-P | 2.74 | 1.39 |
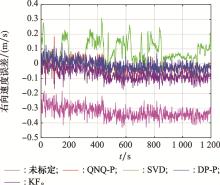
图11
复杂机动时右向速度标定误差"
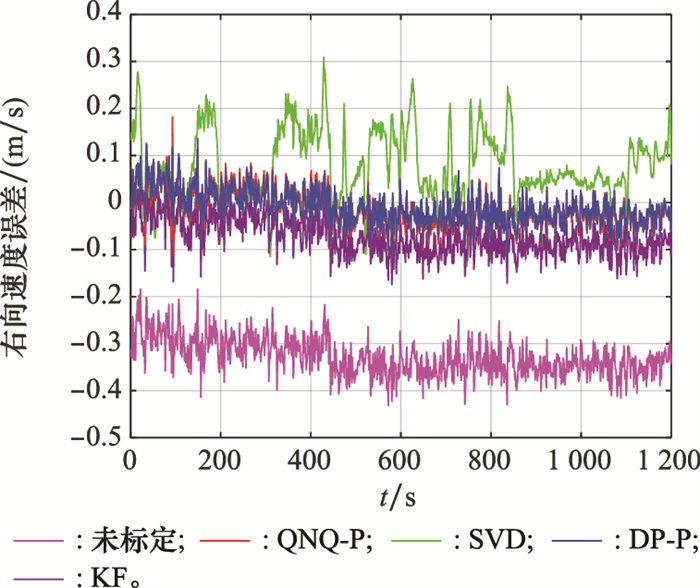
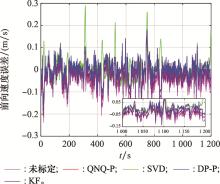
图12
复杂机动时前向速度标定误差"

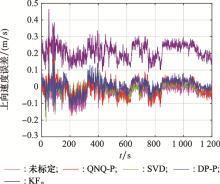
图13
复杂机动时上向速度标定误差"
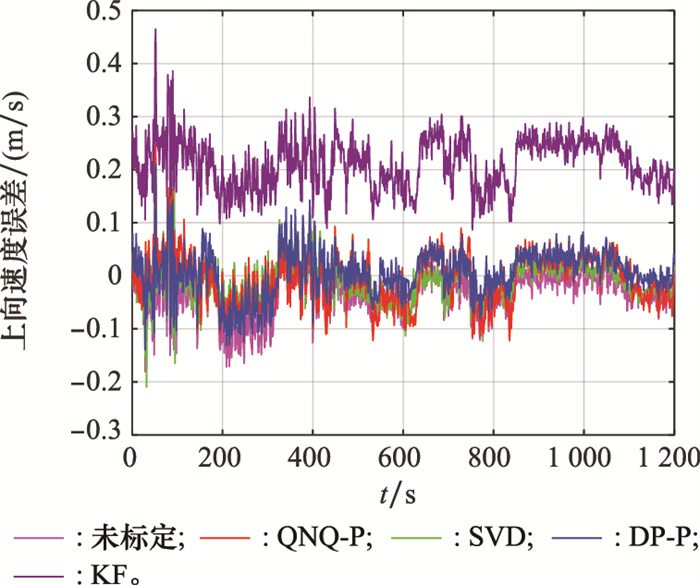
表5
复杂机动时不同标定方法速度误差标定结果"
| 方法 | 右向速度误差 | 前向速度误差 | 上向速度误差 | |||||
| MAX | MAE | MAX | MAE | MAX | MAE | |||
| 未标定 | 0.432 | 0.254 | 0.238 | 0.052 | 0.181 | 0.026 | ||
| SVD | 0.309 | 0.040 | 0.290 | 0.033 | 0.210 | 0.028 | ||
| KF | 0.175 | 0.053 | 0.215 | 0.042 | 0.465 | 0.195 | ||
| QNQ-P | 0.182 | 0.031 | 0.188 | 0.033 | 0.247 | 0.024 | ||
| DP-P | 0.137 | 0.029 | 0.187 | 0.033 | 0.211 | 0.024 | ||
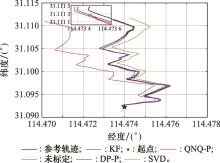
图14
复杂机动时试验载体轨迹对比图"
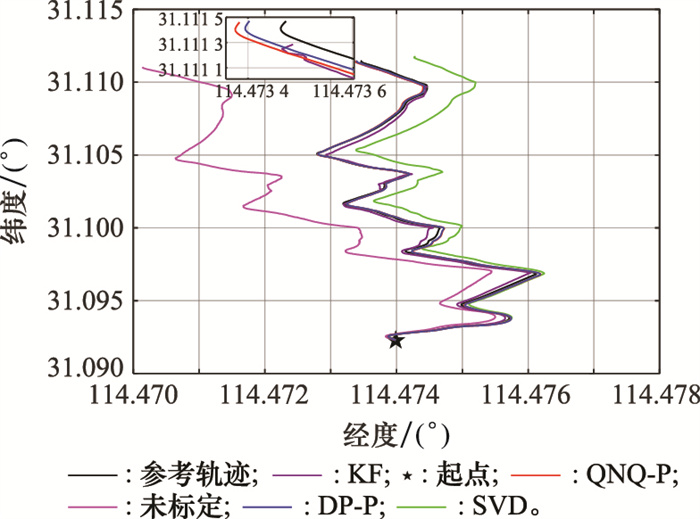
图15
复杂机动时位置误差对比图"
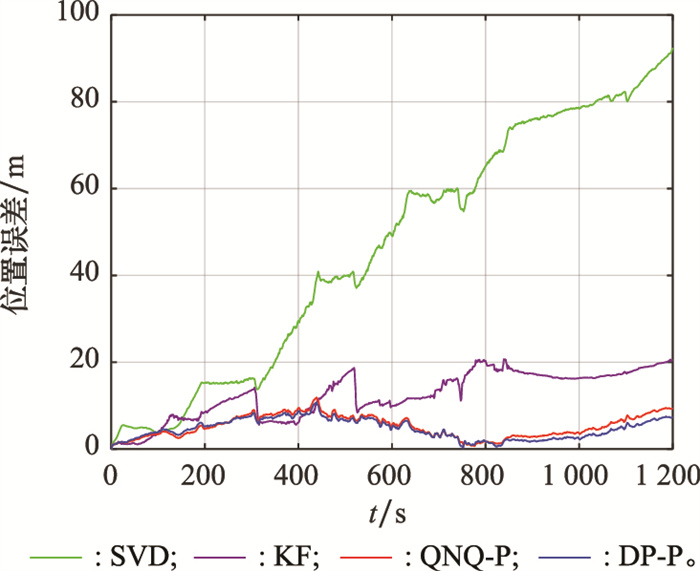
表6
复杂机动时位置误差的最大值与平均值"
| 方法 | 最大值 | 平均值 |
| 未标定 | 356.58 | 160.94 |
| SVD | 92.41 | 46.71 |
| KF | 20.71 | 12.48 |
| QNQ-P | 11.84 | 5.22 |
| DP-P | 10.72 | 4.65 |
| 1 | 高永琪, 马威强, 张林森, 等. 分布式多AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44 (5): 1670- 1676. |
| GAO Y Q , MA W Q , ZHANG L S , et al. Distributed multi-AUVs cooperative search method[J]. Systems Engineerine and Electronics, 2022, 44 (5): 1670- 1676. | |
| 2 |
SONG S S , LIU J , GUO J N , et al. Neural-network-based AUV navigation for fast-changing environments[J]. IEEE Internet of Things Journal, 2020, 7 (10): 9773- 9783.
doi: 10.1109/JIOT.2020.2988313 |
| 3 |
ZHANG X , HE B , GAO S , et al. Multiple model AUV navigation methodology with adaptivity and robustness[J]. Ocean Engineering, 2022, 254, 111258.
doi: 10.1016/j.oceaneng.2022.111258 |
| 4 |
许江宁. 浅析水下PNT体系及其关键技术[J]. 导航定位与授时, 2017, 4 (1): 1- 6.
doi: 10.19306/j.cnki.2095-8110.2017.01.001 |
|
XU J N . Analysis on underwater PNT system and key technologies[J]. Navigation Positiong and Timing, 2017, 4 (1): 1- 6.
doi: 10.19306/j.cnki.2095-8110.2017.01.001 |
|
| 5 | 吕旭, 胡柏青, 戴永彬, 等. 基于PSO的USQUE在组合导航姿态估计中的应用[J]. 系统工程与电子技术, 2020, 42 (6): 1366- 1371. |
| LYU X , HU B Q , DAI Y B , et al. Application of USQUE based on PSO in attitude[J]. Systems Engineering and Electronics, 2020, 42 (6): 21366- 1371. | |
| 6 | YAO Y Q , XU X S , YANG D R , et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Trans.on Vehicular Technology, 2022, 69 (4): 3740- 3747. |
| 7 |
SHI W C , XU J N , LI D , et al. Attitude estimation of SINS on underwater dynamic base with variational Bayesian robust adaptive Kalman filter[J]. IEEE Sensors Journal, 2022, 22 (11): 10954- 10964.
doi: 10.1109/JSEN.2022.3168537 |
| 8 |
ZHU J P , LI A , QIN F J , et al. A novel hybrid method based on deep learning for an integrated navigation system during DVL signal failure[J]. Electronics, 2022, 11 (19): 2980.
doi: 10.3390/electronics11192980 |
| 9 |
ZHU T G , LIU Y , LI W K , et al. The quaternion based attitude error for the nonlinear error model of the INS[J]. IEEE Sensors Journal, 2021, 21 (22): 25782- 25795.
doi: 10.1109/JSEN.2021.3118039 |
| 10 |
SHI W C , XU J N , HE H Y , et al. Fault-tolerant SINS/HSB/DVL underwater integrated navigation system based on variational bayesian robust adaptive Kalman filter and adaptive information sharing factor[J]. Measurement, 2022, 196, 111225.
doi: 10.1016/j.measurement.2022.111225 |
| 11 |
ZHU J P , LI A , QIN F J , et al. A new robust adaptive filter aided by machine learning method for SINS/DVL integrated navigation system[J]. Sensors, 2022, 22 (10): 3792.
doi: 10.3390/s22103792 |
| 12 |
YAO Y Q , XU X S , LI Y , et al. A hybrid IMM based INS/DVL integration solution for underwater vehicles[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (6): 5459- 5470.
doi: 10.1109/TVT.2019.2910397 |
| 13 |
ZHANG Q , HU Y Q , LI S S , et al. Mounting parameter estimation from velocity vector observations for land vehicle navigation[J]. IEEE Trans.on Industrial Electronics, 2022, 69 (4): 4234- 4244.
doi: 10.1109/TIE.2021.3075883 |
| 14 |
KINSEY J C , WHITCOMB L L . In situ alignment calibration of attitude and Doppler sensors for precision underwater vehicle navigation: theory and experiment[J]. IEEE Journal of Oceanic Engineering, 2007, 32 (2): 286- 299.
doi: 10.1109/JOE.2007.893686 |
| 15 |
XU B , GUO Y . A novel DVL calibration method based on robust invariant extended Kalman filter[J]. IEEE Trans.on Vehicular Technology, 2022, 71 (9): 9422- 9434.
doi: 10.1109/TVT.2022.3182017 |
| 16 |
CHANG L B , LI Y , XUE B Y . Initial alignment for Doppler velocity log aided strapdown inertial navigation system with limited information[J]. IEEE/ASME Trans.on Mechatronics, 2017, 22 (1): 329- 338.
doi: 10.1109/TMECH.2016.2616412 |
| 17 | 刘德铸, 郑翠娥, 张殿伦, 等. 传感器安装误差在声学多普勒计程仪中的校准[J]. 传感器与微系统, 2009, 28 (11): 71- 73. |
| LIU D Z , ZHENG C E , ZHANG D L , et al. Calibration of transducer's installation error for acoustic Doppler velocity log[J]. Transducer and Microsystem Technologies, 2009, 28 (11): 71- 73. | |
| 18 |
LI W L , ZHANG L D , SUN F P , et al. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation[J]. Optik, 2015, 126 (23): 3872- 3876.
doi: 10.1016/j.ijleo.2015.07.187 |
| 19 | LYU Z P, TANG K H, WU M P. Online estimation of DVL misalignment angle in SINS/DVL integrated navigation system[C]// Proc. of the IEEE 10th International Conference on Electronic Measurement & Instruments, 2011, 2: 336-339. |
| 20 | 徐晓苏, 杨阳, 李瑶. 一种基于梯度下降四元数理论的DVL误差标定方法[J]. 中国惯性技术学报, 2019, 27 (4): 448- 453. |
| XU X S , YANG Y , LI Y . DVL error calibration method based on gradient descent quaternion estimation theory[J]. Journal of Chinese Inertial Technology, 2019, 27 (4): 448- 453. | |
| 21 |
WANG D , XU X S , YANG Y , et al. A quasi-Newton quaternions calibration method for DVL error aided GNSS[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (3): 2465- 2477.
doi: 10.1109/TVT.2021.3059755 |
| 22 |
WANG B , LIU J Y , DENG Z H , et al. A model-free calibration method of inertial navigation system and Doppler sensors[J]. IEEE Sensors Journal, 2021, 21 (2): 2219- 2229.
doi: 10.1109/JSEN.2020.3015845 |
| 23 | LI D , XU J N , ZHU B , et al. A calibration method of DVL in integrated navigation system based on particle swarm optimization[J]. Measurement, 2021, 187, 110325. |
| 24 | 杨阳. SINS/DVL一体化系统标定方法及组合定位技术研究[D]. 南京: 东南大学, 2020. |
| YANG Y. Research on calibration method and combined positioning technology of SINS/DVL integrated system[D]. Nanjing: Southeast University, 2020. | |
| 25 | XU B , WANG L Z , LI S X , et al. A novel calibration method of SINS/DVL integration navigation system based on quaternion[J]. IEEE Sensors Journal, 2020, 20 (16): 9567- 9580. |
| 26 | 刘静晓, 李海兵, 马思乐, 等. AUV组合导航系统中的DVL误差标定技术综述[C]//惯性技术发展动态发展方向研讨会论文集——前沿技术与惯性技术的融合与应用, 2021: 138-143. |
| LIU X J, LI H B, MA S L, et al. Overview of DVL error calibration technology in AUV integrated navigation system[C]//Proc. of the Symposium on Dynamic Development Direction of Inertial Technology—Fusion and Application of Cutting-Edge and Inertial Technology, 2021: 138-143. | |
| 27 |
XIANG Z Y , WANG Q , HUANG R , et al. Position observation-based calibration method for an LDV/SINS integrated navigation system[J]. Applied Optics, 2021, 60 (26): 7869- 7877.
doi: 10.1364/AO.430866 |
| 28 |
WU M P , WU Y X , HU X P , et al. Optimization-based alignment for inertial navigation system: theory and algorithm[J]. Aerospace Science and Technology, 2011, 15 (1): 1- 17.
doi: 10.1016/j.ast.2010.05.004 |
| 29 |
CHANG G B , XU T H , WANG Q X . Error analysis of Davenport's q method[J]. Automatica, 2017, 75, 217- 220.
doi: 10.1016/j.automatica.2016.09.018 |
| 30 | PAN X F , WU Y X . Underwater Doppler navigation with self-calibration[J]. Journal of Navigation, 2016, 69 (2): 295- 312. |
| 31 | LYU X , HU B Q , LI K L , et al. An adaptive and robust UKF approach based on Gaussian process regression-aided variational Bayesian[J]. IEEE Sensors Journal, 2021, 21 (7): 9500- 9514. |
| [1] | 靳凯迪, 柴洪洲, 宿楚涵, 向民志, 李明. 基于状态变换卡尔曼滤波的DVL/SINS组合导航算法[J]. 系统工程与电子技术, 2023, 45(11): 3624-3631. |
| [2] | 朱天高, 刘勇, 李开龙, 赵仁杰. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273. |
| [3] | 高利春, 高铭阳, 陈晓芳, 饶建兵, 费泽松, 倪少杰. 基于SINS/GBAS组合导航的高精度进近着陆导航技术[J]. 系统工程与电子技术, 2023, 45(1): 210-220. |
| [4] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [5] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [6] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| [7] | 孙淑光, 温启新. 基于高程异常补偿的飞机终端区组合导航高度优化算法[J]. 系统工程与电子技术, 2021, 43(9): 2612-2619. |
| [8] | 文者, 卞鸿巍, 马恒, 臧涛. 中低纬度下惯导极区性能模拟测试方法[J]. 系统工程与电子技术, 2021, 43(9): 2620-2627. |
| [9] | 赵仁杰, 胡柏青, 吕旭, 田佳玉. 基于双欧拉角的UKF组合导航滤波算法[J]. 系统工程与电子技术, 2021, 43(7): 1912-1920. |
| [10] | 蔡保杰, 邵雷. 三段判别域与最小二乘拟合的抗差滤波算法[J]. 系统工程与电子技术, 2021, 43(5): 1346-1353. |
| [11] | 苏敬, 何华锋, 何耀民, 王依繁, 韩晓斐. 考虑SAR量测特性的弹载SINS/SAR组合导航滤波算法[J]. 系统工程与电子技术, 2021, 43(4): 1044-1049. |
| [12] | 吕旭, 胡柏青, 戴永彬, 赵仁杰. 基于PSO的USQUE在组合导航姿态估计中的应用[J]. 系统工程与电子技术, 2020, 42(6): 1366-1371. |
| [13] | 罗凯鑫, 吴美平, 范颖. 基于最大熵方法的鲁棒自适应滤波及其应用[J]. 系统工程与电子技术, 2020, 42(3): 667-673. |
| [14] | 何康辉, 董朝阳. 基于正交变换的五阶容积卡尔曼滤波导航算法[J]. 系统工程与电子技术, 2020, 42(3): 680-685. |
| [15] | 张闯, 郭晨, 张大恒. 船舶组合导航自适应迭代粒子滤波方法及应用[J]. 系统工程与电子技术, 2019, 41(4): 883-888. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||