| 1 |
XU J, GAO Q, XIAO L, et al. Autonomous decision-making method for combat mission of UAV based on deep reinforcement learning[C]//Proc. of the IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference, 2019.
|
| 2 |
岳源, 屈高敏. 分布式多无人机协同侦察目标分配研究[J]. 兵器装备工程学报, 2018, 39 (3): 57- 61.
doi: 10.11809/bqzbgcxb2018.03.012
|
|
YUE Y , QU G M . Research on target allocation of distributed multi-UAV cooperative reconnaissance[J]. Journal of Ordnance Equipment Engineering, 2018, 39 (3): 57- 61.
doi: 10.11809/bqzbgcxb2018.03.012
|
| 3 |
CHEN W , LIU J J , GUO H Z , et al. Toward robust and intelligent drone swarm: challenges and future directions[J]. IEEE Network, 2020, 34 (4): 278- 283.
doi: 10.1109/MNET.001.1900521
|
| 4 |
FRASER C , BERTUCCELLI L , CHOI H . A hyperparameter consensus method for agreement under uncertainty[J]. Automatica, 2012, 48 (2): 374- 380.
doi: 10.1016/j.automatica.2011.11.003
|
| 5 |
ZOU D X , LIU H K , GAO L Q , et al. An improved differential evolution algorithm for the task assignment problem[J]. Engineering Application of Artificial Intelligence, 2011, 24 (4): 616- 624.
doi: 10.1016/j.engappai.2010.12.002
|
| 6 |
ZHANG J , XING J H . Cooperative task assignment of multi-UAV system[J]. Chinese Journal of Aeronautics, 2020, 33 (11): 2825- 2827.
doi: 10.1016/j.cja.2020.02.009
|
| 7 |
林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992.
|
|
LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992.
|
| 8 |
ALIGHANBARI M, HOW J P. Cooperative task assignment of unmanned aerial vehicles in adversarial environments[C]//Proc. of the American Control Conference, 2005.
|
| 9 |
OH G , KIM Y , AHN J , et al. Market-based task assignment for cooperative timing missions in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2017, 87, 97- 123.
|
| 10 |
THI H , NGUYEN D , DINH T . Globally solving a nonlinear UAV task assignment problem by stochastic and deterministic optimization approaches[J]. Optimization Letters, 2012, 6 (2): 315- 329.
doi: 10.1007/s11590-010-0259-x
|
| 11 |
马云红, 井哲, 周德云. 一种任务分配问题的快速剪枝优化算法[J]. 西北工业大学学报, 2013, 31 (1): 40- 43.
|
|
MA Y H , JING Z , ZHOU D Y . A fast pruning optimization algorithm for task assignment problem[J]. Journal of Northwestern Polytechnical University, 2013, 31 (1): 40- 43.
|
| 12 |
张驰. 无人机任务分配仿真平台设计与研究[D]. 西安: 西安电子科技大学, 2014.
|
|
ZHANG C. Design and research of UAV task assignment si-mulation platform[D]. Xi'an: Xidian University, 2014.
|
| 13 |
张瑞鹏, 冯彦翔, 杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2021,
doi: 10.7527/S1000-6893.2021.26011
|
|
ZHANG R P , FENG Y X , YANG Y K . Hybrid particle swarm algorithm for multi-UAV cooperative task allocation[J]. Acta Aeronautica et Astronautica Sinica, 2021,
doi: 10.7527/S1000-6893.2021.26011
|
| 14 |
DENG Q B , YU J Q , MEI Y S . Deadlock-free consecutive task assignment of multiple heterogeneous unmanned aerial vehicles[J]. Journal of Aircraft, 2014, 51 (2): 596- 605.
doi: 10.2514/1.C032309
|
| 15 |
HU C F , ZHANG Z L , YANG N , et al. Fuzzy multiobjective cooperative surveillance of multiple UAVs based on distributed predictive control for unknown ground moving target in urban environment[J]. Aerospace Science and Technology, 2019, 84, 329- 338.
doi: 10.1016/j.ast.2018.10.017
|
| 16 |
SHIMA T , RASMUSSEN S , SPARKS A , et al. Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers & Operations Research, 2006, 33 (11): 3252- 3269.
|
| 17 |
KURDI H , ALDAOOD M , Al-MEGREN S , et al. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour[J]. Applied Soft Computing, 2019, 83, 105643.
doi: 10.1016/j.asoc.2019.105643
|
| 18 |
BELLO-ORGAZ G , RAMIREZ-ATENCIA C , FRADERA-GIL J , et al. GAMPP: genetic algorithm for UAV mission planning problems[M]. Madrid: Springer International Publishing, 2016.
|
| 19 |
WU X L , YIN Y N , XU L , et al. Multi-UAV task allocation based on improved genetic algorithm[J]. IEEE Access, 2021, 9, 369- 379.
|
| 20 |
苏菲, 陈岩, 沈林成. 基于蚁群算法的无人机协同多任务分配[J]. 航空学报, 2008, 29 (S1): 184- 191.
|
|
SU F , CHEN Y , SHEN L C . UAV cooperative multi-task assignment based on ant colony algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29 (S1): 184- 191.
|
| 21 |
ZHEN Z Y , YAN C , WEN L D , et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100 (13): 1005826.
|
| 22 |
ZHANG X Y , LU X Y , JIA S , et al. A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning[J]. Applied Soft Computing, 2018, 70, 371- 388.
|
| 23 |
SUJIT P, GEORGE J, BEARD R. Multiple UAV task allocation using particle swarm optimization[C]//Proc. of the Navigation and Control Conference, 2006.
|
| 24 |
周同乐, 陈谋, 朱荣刚, 等. 基于狼群算法的多无人机协同多目标攻防满意决策方法[J]. 指挥与控制学报, 2020, 6 (3): 251- 256.
|
|
ZHOU T L , CHEN M , ZHU R G , et al. A multi-UAV collaborative multi-objective attack and defense satisfactory decision method based on wolf pack algorithm[J]. Journal of Command and Control, 2020, 6 (3): 251- 256.
|
| 25 |
GAO C , ZHEN Z Y , GONG H J . A self-organized search and attack algorithm for multiple unmanned aerial vehicles[J]. Aerospace Science and Technology, 2016, 54, 229- 240.
|
| 26 |
GAO S , WU J Z , AI J . Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm[J]. Soft Computing, 2021, 25 (5): 7155- 7167.
|
| 27 |
LUO R B , ZHENG H X , GUO J F . Solving the multi-functional heterogeneous UAV cooperative mission planning problem using multi-swarm fruit fly optimization algorithm[J]. Sensors, 2020, 20 (18): 5026.
|
| 28 |
蒋硕, 袁小平. 改进PSO算法在多无人机协同任务分配中的应用[J]. 计算机应用研究, 2019, 36 (11): 3344- 3360.
|
|
JIANG S , YUAN X P . Application of improved PSO algorithm in multi-UAV cooperative task assignment[J]. Computer Application Research, 2019, 36 (11): 3344- 3360.
|
| 29 |
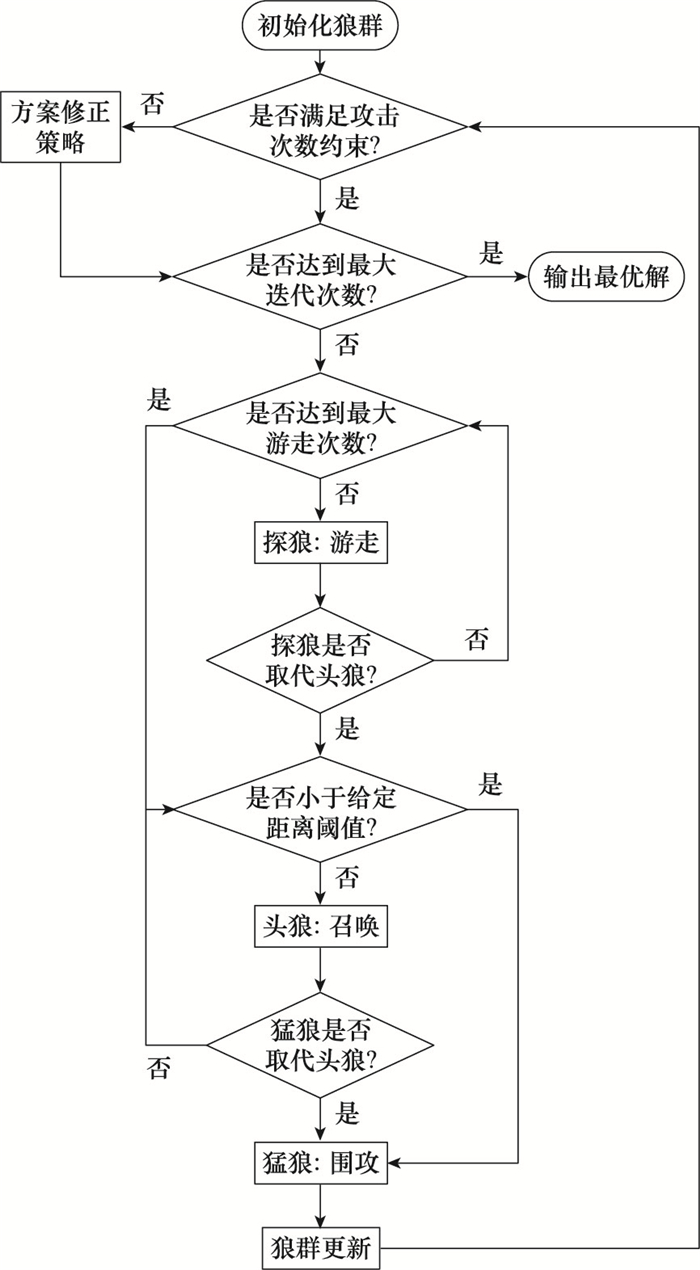
吴虎胜, 张凤鸣, 吴庐山. 一种新的群体智能算法——狼群算法[J]. 系统工程与电子技术, 2013, 35 (11): 2430- 2438.
|
|
WU H S , ZHANG F M , WU L S . A new swarm intelligence algorithm-wolf pack algorithm[J]. Systems Engineering and Electronics, 2013, 35 (11): 2430- 2438.
|
| 30 |
CHEN H W, XU J Y, WU C. Multi-UAV task assignment based on improved wolf pack algorithm[C]//Proc. of the International Conference on Cyberspace Innovation of Advanced Technologies, 2020.
|
| 31 |
CHEN Y B , YANG D , YU J Q . Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J]. IEEE Trans.on Aerospace and Electronic Systems, 2018, 54 (6): 2853- 2872.
|
| 32 |
LU Y T , MA Y F , WANG J Y , et al. Task assignment of UAV swarm based on wolf pack algorithm[J]. Applied Sciences, 2020, 10 (23): 8335.
|