
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (8): 2221-2231.doi: 10.12305/j.issn.1001-506X.2021.08.24
刘钢1, 汤俊2, 刘陈3, 李武1,*
收稿日期:2021-03-28
出版日期:2021-07-23
发布日期:2021-08-05
通讯作者:
李武
作者简介:刘钢(1983—), 男, 工程师, 博士, 主要研究方向为智能信息处理、协同任务规划|汤俊(1988—), 男, 副教授, 博士, 主要研究方向为多飞行器集群、复杂系统建模|刘陈(1982—), 男, 研究员, 博士, 主要研究方向为武器装备体系和系统设计与仿真|李武(1977—), 男, 教授, 博士, 主要研究方向为智能信息处理、多目标优化
基金资助:Gang LIU1, Jun TANG2, Chen LIU3, Wu LI1,*
Received:2021-03-28
Online:2021-07-23
Published:2021-08-05
Contact:
Wu LI
摘要:
无人飞行器集群协同作为一种全新的任务执行形态, 正逐渐成为生成体系作战能力的有效途径, 而自组织集群行为建模技术是实现集群高效率协同的关键所在。基于无人飞行器集群协同特点梳理总结了关键技术问题, 从复杂系统图形化建模、集群多编队协同、集群队形变换、集群决策控制等4个方面, 对无人飞行器集群协同行为建模技术现状和存在难点进行了全面总结, 提出了基本框架和实现途径, 展望了当前无人飞行器集群协同行为建模技术研究应当关注的若干发展方向和可预见的显著效益, 为无人飞行器集群协同行为建模技术发展提供了参考与依据。
中图分类号:
刘钢, 汤俊, 刘陈, 李武. 无人飞行器集群协同行为建模技术综述[J]. 系统工程与电子技术, 2021, 43(8): 2221-2231.
Gang LIU, Jun TANG, Chen LIU, Wu LI. Survey of cooperative behavior modeling technology forunmanned aerial vehicles clusters[J]. Systems Engineering and Electronics, 2021, 43(8): 2221-2231.
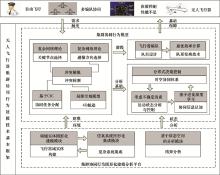
图1
集群协同行为建模基本框架"
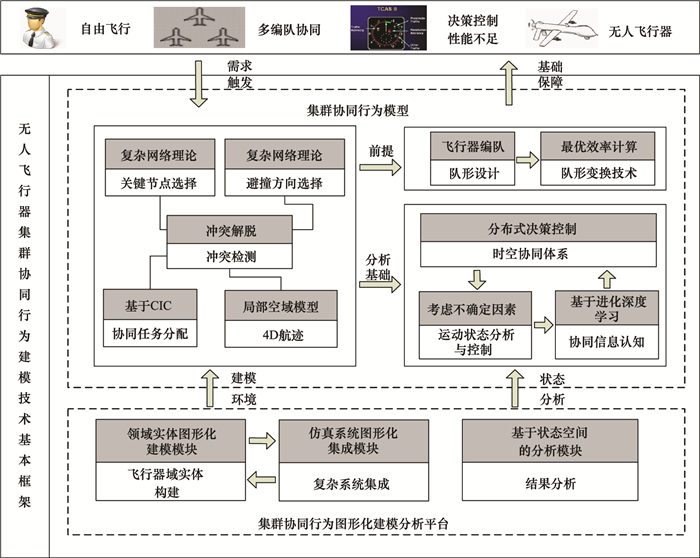
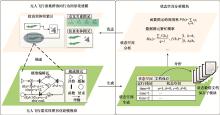
图2
集群协同行为图形化建模分析平台组成结构"
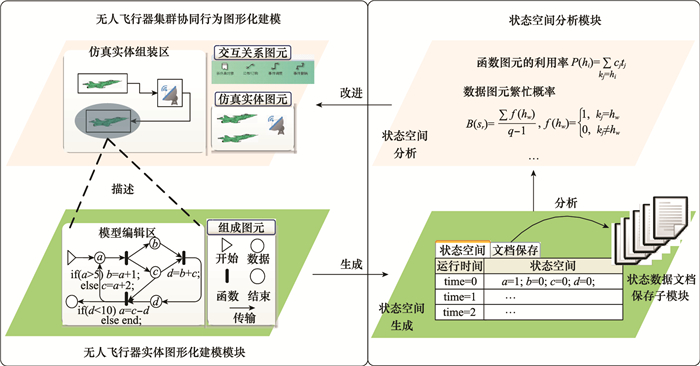
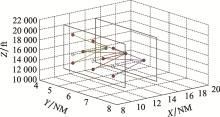
图3
无人飞行器集群复杂网络概念图"
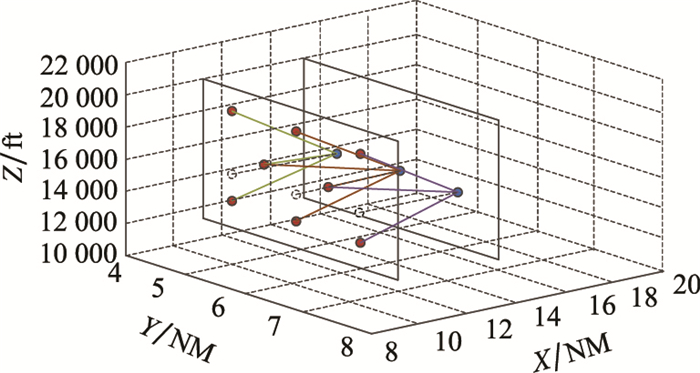
图4
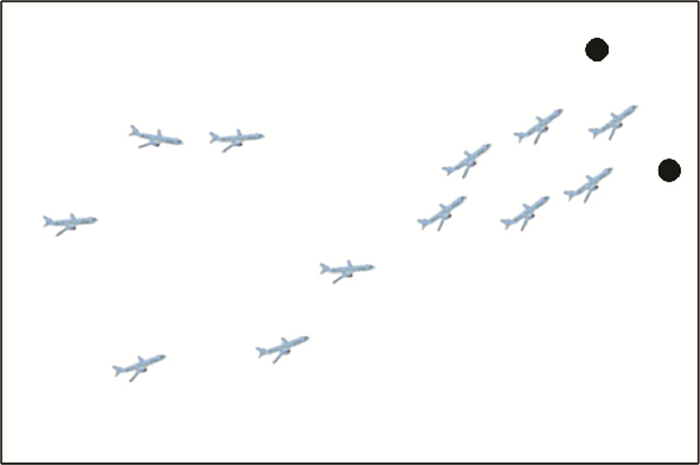
编队重构"
| 1 |
SU X J , LYU X Z . Reliability simulation and analysis of phased-mission system with multiple states[J]. Journal of Systems Engineering and Electronics, 2019, 30 (3): 624- 632.
doi: 10.21629/JSEE.2019.03.19 |
| 2 |
MELLOR A . The temporal event graph[J]. Journal of Complex Networks, 2018, 6 (4): 639- 659.
doi: 10.1093/comnet/cnx048 |
| 3 | HWANG C E , LEE S H , JEONG J W . VisKit: web-based interactive IoT management with deep visual object detection[J]. Journal of Sensor and Actuator Networks, 2019, 8 (1): 1- 21. |
| 4 | 翟禹尧, 史贤俊, 吕佳朋, 等. 基于GSPN的导弹多层级测试性需求建模与指标评估[J]. 系统工程与电子技术, 2021, 43 (4): 970- 979. |
| ZHAI Y Y , SHI X J , LYU J P , et al. Modeling and index evaluation of multi-level testability of missiles based on GSPN[J]. Systems Engineering and Electronics, 2021, 43 (4): 970- 979. | |
| 5 |
JURANIC J , PAVKOVIC N , NAUMANN T , et al. Patterns of engineering design collaboration and reasoning activities modelled with coloured petri nets[J]. Journal of Engineering Design, 2019, 30 (10-12): 563- 598.
doi: 10.1080/09544828.2019.1630803 |
| 6 | ZEIGLER B P , PRAEHOFER H , KIM T G . Theory of modeling and simulation: integrating discrete event and continuous complex dynamic systems[M]. 2nd Ed New York: Academic Press, 2000. |
| 7 |
EKER J , JANNECK J W , LEE E A , et al. Taming heterogeneity-the Ptolemy approach[J]. Proceedings of the IEEE, 2003, 91 (1): 127- 144.
doi: 10.1109/JPROC.2002.805829 |
| 8 | GUILLON A, LOACH D. YetiSim: a C++ simulation library with execution graphs instead of coroutines[C]//Proc. of the Spring Simulation Multi-Conference, 2008. |
| 9 | HANNON C, JIN D, SANTHI N, et al. Just-in-time parallel simulation[C]//Proc. of the IEEE Winter Simulation Confe-rence, 2018. |
| 10 |
ZHANG Y , CASSANDRAS C G , LI W , et al. A discrete-event and hybrid traffic simulation model based on simevents for intelligent transportation system analysis in Mcity[J]. Discrete Event Dynamic Systems, 2019, 29 (3): 265- 295.
doi: 10.1007/s10626-019-00286-w |
| 11 | 方贤文, 陶小燕, 刘祥伟. 基于微分Petri网的业务流程模块适配方法[J]. 电子学报, 2017, 45 (4): 777- 781. |
| FANG X W , TAO X Y , LIU X W . Method of module adaptation based on differential petri net[J]. Chinese Journal of Electronics, 2017, 45 (4): 777- 781. | |
| 12 | 杜国红, 韦伟, 李路遥. 作战仿真实体图形化建模研究[J]. 系统仿真学报, 2015, 27 (2): 234- 239. |
| DU G H , WEI W , LI L Y . Research on component-based modeling of combat simulation entity[J]. Journal of System Simulation, 2015, 27 (2): 234- 239. | |
| 13 | 蔡继红, 卿杜政, 谢宝娣. 支持LVC互操作的分布式联合仿真技术研究[J]. 系统仿真学报, 2015, 27 (1): 93- 97. |
| CAI J H , QING D Z , XIE B D . Research of joint simulation platform supporting interoperability of LVC[J]. Journal of System Simulation, 2015, 27 (1): 93- 97. | |
| 14 | 罗键, 武鹤. 基于交互式动态影响图的对手建模[J]. 控制与决策, 2016, 31 (4): 635- 639. |
| LUO J , WU H . Opponent modeling based on interactive dynamic influence diagram[J]. Journal of Control and Decision, 2016, 31 (4): 635- 639. | |
| 15 | 葛承垄, 朱元昌, 邸彦强, 等. 装备平行仿真技术的基础理论问题[J]. 系统工程与电子技术, 2017, 39 (5): 1169- 1177. |
| GE C L , ZHU Y C , DI Y Q , et al. Basic theoretical issues of equipment parallel simulation technology[J]. Systems Engineering and Electronics, 2017, 39 (5): 1169- 1177. | |
| 16 |
黄克明, 王涛, 胡军. 无人机作战仿真平台设计及其关键技术研究[J]. 兵工自动化, 2016, 35 (1): 90- 92.
doi: 10.7690/bgzdh.2016.01.026 |
|
HUANG K M , WANG T , HU J . Study on design of UAV combat simulation platform and its key techniques[J]. Ordnance Industry Automation, 2016, 35 (1): 90- 92.
doi: 10.7690/bgzdh.2016.01.026 |
|
| 17 | MARKS B L . Air traffic control separation standards and collision risk[M]. London: Royal Aircraft Establishment, 1963. |
| 18 |
REICH P G . Analysis of long-range air traffic systems: separation standards-Ⅲ[J]. Journal of Navigation, 1966, 19 (3): 331- 347.
doi: 10.1017/S0373463300047445 |
| 19 |
SAHAWNEH L R , MACKIE J , SPENCER J , et al. Airborne radar-based collision detection and risk estimation for small unmanned aircraft systems[J]. Journal of Aerospace Information Systems, 2015, 12 (12): 756- 766.
doi: 10.2514/1.I010284 |
| 20 |
FASANO G , ACCADO D , MOCCIA A , et al. Sense and avoid for unmanned aircraft systems[J]. IEEE Aerospace and Electronic Systems Magazine, 2016, 31 (11): 82- 110.
doi: 10.1109/MAES.2016.160116 |
| 21 | NETJASOV F , MIRKOVIC B , SIMIC T K , et al. Hazard identification approach for future highly-automated air traffic management concepts of operation: experiences from the AUTOPACE project[J]. WIT Transactions on the Built Environment, 2018, 174, 303- 315. |
| 22 |
BELKACEM K , MUNAWAR K , MUHAMMAD S S . Distributed cooperative control of autonomous multi-agent UAV systems using smooth control[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307.
doi: 10.23919/JSEE.2020.000100 |
| 23 | LEE R , WOLPERT D . Game theoretic modelling of pilot behavior during mid-air encounters[M]. Berlin: Springer Berlin Heidelberg, 2012. |
| 24 | CETIN O , YILMAZ G . Real-time autonomous UAV formation flight with collision and obstacle avoidance in unknown environment[J]. Journal of Intelligent & Robotic Systems, 2016, 84 (4): 415- 433. |
| 25 |
SPYRIDIS Y , LAGKAS T , SARIGIANNIDS P , et al. Modelling and simulation of a new cooperative algorithm for UAV swarm coordination in mobile RF target tracking[J]. Simulation Modelling Practice and Theory, 2021, 107, 102232.
doi: 10.1016/j.simpat.2020.102232 |
| 26 |
GASSARA A , BOUASSIDA R I . Describing correct UAVs coope-ration architectures applied on an anti-terrorism scenario[J]. Journal of Information Security and Applications, 2021, 58, 102775.
doi: 10.1016/j.jisa.2021.102775 |
| 27 | 汤俊, 朱峰, 万宇, 等. 基于状态预测的空中防撞系统多机避碰性能改进方法[J]. 系统仿真学报, 2018, 30 (12): 4703- 4710, 4717. |
| TANG J , ZHU F , WAN Y , et al. Collision avoidance performance improvement for TCAS in multi-aircraft situations based on state pre[J]. Journal of System Simulation, 2018, 30 (12): 4703- 4710, 4717. | |
| 28 | 张洪海, 钱晓鹏, 吴鑫炜, 等. 基于路径-速度解耦的无人机编队协同轨迹规划[J]. 系统工程与电子技术, 2020, 42 (9): 1976- 1987. |
| ZHANG H H , QIAN X P , WU X W , et al. Cooperative tra-jectory planning for UAV formation based on path-speed decoup-ling[J]. Systems Engineering and Electronics, 2020, 42 (9): 1976- 1987. | |
| 29 |
WANG Y X , ZHANG T , CAI Z H , et al. Multi-UAV coordination control by chaotic grey wolf optimization based distributed MPC with event-triggered strategy[J]. Chinese Journal of Aeronautics, 2020, 33 (11): 2877- 2897.
doi: 10.1016/j.cja.2020.04.028 |
| 30 |
HU C F , QU G , SHIN H S , et al. Distributed synchronous cooperative tracking algorithm for ground moving target in urban by UAVs[J]. International Journal of Systems Science, 2021, 52 (4): 832- 847.
doi: 10.1080/00207721.2020.1844340 |
| 31 | WANG J H , MENG H , RICARDO A . Application of ellipsoidal approximation into target tracking for multi UAVs formation cooperative detection[J]. International Journal of Modelling, Identification and Control, 2021, 35 (2): 108- 119. |
| 32 |
LI L L , ZHANG X Y , YUE W , et al. Cooperative search for dynamic targets by multiple UAVs with communication data losses[J]. ISA Transactions, 2021, 114, 230- 241.
doi: 10.1016/j.isatra.2020.12.055 |
| 33 | WANG W H , WANG X P , LIU B , et al. Research on optimal cooperative attack strategy of multiple UAVs[J]. Journal of Physics: Conference Series, 2021, 1748 (2): 022040. |
| 34 |
YU Z Q , ZHANG Y M , JIANG B , et al. Fault-tolerant time-varying elliptical formation control of multiple fixed-wing UAVs for cooperative forest fire monitoring[J]. Journal of Intelligent & Robotic Systems, 2021, 101 (3): 1- 15.
doi: 10.1007/s10846-021-01320-6 |
| 35 | 王明君. 多无人机协同机场驱鸟系统的任务分配与路径规划[D]. 南京: 南京航空航天大学, 2019. |
| WANG M J. Cooperative task assignment and pathplanning for multi-UAVs bird-driving system at the airport[D]. NanJing: Nanjing University of Aeronautics and Astronautics, 2019. | |
| 36 | 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38 (4): 821- 827. |
| FU X W , WEI F W , GAO X G . Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. Systems Engineering and Electronics, 2016, 38 (4): 821- 827. | |
| 37 |
KIM H , KIM Y . Trajectory optimization for unmanned aerial vehicle formation reconfiguration[J]. Engineering Optimization, 2014, 46 (1): 84- 106.
doi: 10.1080/0305215X.2012.748048 |
| 38 |
HAFEZ A T , MARASCO A J , GIVIGI S N , et al. Solving multi-UAV dynamic encirclement via model predictive control[J]. IEEE Trans.on Control Systems Technology, 2015, 23 (6): 2251- 2265.
doi: 10.1109/TCST.2015.2411632 |
| 39 |
RADMANESH M , KUMAR M . Flight formation of UAVs in presence of moving obstacles using fast-dynamic mixed integer linear programming[J]. Aerospace Science and Technology, 2016, 50, 149- 160.
doi: 10.1016/j.ast.2015.12.021 |
| 40 |
THOMAS C , CRISTINA V , CRISTINA S M , et al. Decentralized MPC for UAVs formation deployment and reconfiguration with multiple outgoing agents[J]. Journal of Intelligent & Robotic Systems, 2020, 97 (2): 155- 170.
doi: 10.1007/s10846-019-01025-x |
| 41 |
KABIRI M , ATRIANFAR H , MENHAJ M B . Formation control of VTOL UAV vehicles under switching-directed interaction topologies with disturbance rejection[J]. International Journal of Control, 2018, 91 (1): 33- 44.
doi: 10.1080/00207179.2016.1266518 |
| 42 | 毛琼, 李小民, 王正军. 基于规则的无人机编队队形构建与重构控制方法[J]. 系统工程与电子技术, 2019, 41 (5): 1118- 1125. |
| MAO Q , LI X M , WANG Z J . Formation and re-formation control method for UAVs formation shape based on rules[J]. Systems Engineering and Electronics, 2019, 41 (5): 1118- 1125. | |
| 43 | 符小卫, 陈子浩. 基于一致性协议的多无人机协同围捕控制方法[EB/OL]. [2021-03-26] https://kns.cnki.net/kcms/detail/11.2422.TN.20210406.1714.019.html. |
| FU X W, CHEN Z H. Cooperative capture control method for multi-UAV based on consensus protocol[EB/OL]. [2021-03-26] https://kns.cnki.net/kcms/detail/11.2422.TN.20210406.1714.019.html. | |
| 44 |
DUAN H B , QUAN P X . Pigeon-inspired optimization: a new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7 (1): 24- 37.
doi: 10.1108/IJICC-02-2014-0005 |
| 45 |
SUSHNIGDHA G , JOSHI A . Re-entry trajectory optimization using pigeon inspired optimization based control profiles[J]. Advances in Space Research, 2018, 62 (11): 3170- 3186.
doi: 10.1016/j.asr.2018.08.009 |
| 46 | KHATIB O . Real-time obstacle for manipulators and mobile robot[J]. The International Journal of Robotics Research, 1986, 5 (1): 290- 298. |
| 47 |
AZAM M A , MITTELMANN H D , RAGI S . UAV formation shape control via decentralized markov decision processes[J]. Algorithms, 2021, 14 (3): 91- 102.
doi: 10.3390/a14030091 |
| 48 | 顾伟, 汤俊, 白亮, 等. 面向时间协同的多无人机队形变换最优效率模型[J]. 航空学报, 2019, 40 (6): 192- 200. |
| GU W , TANG J , BAI L , et al. Time synergistic optimal efficiency model for formation transformation of multiple UAVs[J]. Chinese Journal of Aeronautics, 2019, 40 (6): 192- 200. | |
| 49 | 吴立尧, 韩维, 张勇, 等. 基于人机合作的有人/无人机编队队形变换策略[J]. 系统工程与电子技术, 2020, 42 (2): 434- 443. |
| WU L Y , HAN W , ZHANG Y , et al. Formation transformation strategy for manned/unmanned aerial vehicle formation based on human-machine[J]. Systems Engineering and Electronics, 2020, 42 (2): 434- 443. | |
| 50 | 史一博. 适应飞行速度的无人机编队弹性队形控制技术研究[D]. 沈阳: 沈阳航空航天大学, 2014. |
| SHI Y B. Research on elastic formation control of unmanned aerial-vehicle adapting to flight speed[D]. Shenyang: Shenyang Aerospace University, 2014. | |
| 51 |
SHI H R , LU F X , WANG H Y , et al. Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space[J]. Journal of Systems Engineering and Electronics, 2020, 31 (5): 996- 1008.
doi: 10.23919/JSEE.2020.000074 |
| 52 |
DONG X W , LI Y F , LU C , et al. Time-varying formation tracking for UAV swarm systems with switching directed topologies[J]. IEEE Trans.on Neural Networks and Learning Systems, 2019, 30 (12): 3674- 3685.
doi: 10.1109/TNNLS.2018.2873063 |
| 53 | FENG Q, HAI X S, SUN B, et al. Resilience optimization for multi-UAV formation reconfiguration via enhanced pigeon-inspired optimization[EB/OL]. [2021-03-26]. https://www.sciencedirect.com/science/article/pii/S1000936120305616 |
| 54 |
LIU H X , LIU F , ZHANG X J , et al. A formation reconfiguration algorithm for multi-UAVs based on distributed cooperative coevolutionary with an adaptive grouping strategy[J]. Chinese Journal of Electronics, 2020, 29 (5): 841- 851.
doi: 10.1049/cje.2020.07.006 |
| 55 |
邵壮, 祝小平, 周洲, 等. 无人机编队机动飞行时的队形保持反馈控制[J]. 西北工业大学学报, 2015, 33 (1): 26- 32.
doi: 10.3969/j.issn.1000-2758.2015.01.005 |
|
SHAO Z , ZHU X P , ZHOU Z , et al. A formation keeping feedback control for formation flight of UAVs[J]. Journal of Northwestern Polytechnical University, 2015, 33 (1): 26- 32.
doi: 10.3969/j.issn.1000-2758.2015.01.005 |
|
| 56 | 宗群, 秦新立, 张博渊, 等. 双层规划模型的大规模UCAV编队队形优化[J]. 哈尔滨工业大学学报, 2019, 51 (3): 15- 22. |
| ZONG Q , QIN X L , ZHANG B Y , et al. Formation optimization of large-scale UCAV based on bi-level programming model[J]. Journal of Harbin Institute of Technology, 2019, 51 (3): 15- 22. | |
| 57 | 赵国立. 无人机三维编队队形重构技术研究[D]. 沈阳: 沈阳航空航天大学, 2017. |
| ZHAO G L. Reconfiguration control for unmanned aerial vehicles in three-dimensional space[D]. Shenyang: Shenyang Aerospace University, 2017. | |
| 58 | KUCHAR J E , DRUMM A C . The traffic alert and collision avoidance system[J]. Lincoln Laboratory Journal, 2007, 16 (2): 277- 296. |
| 59 | KOCHENDERFER M, ESPINDLE L P, EDWARDS M M, et al. Airspace encounter models for conventional and unconventional aircraft[C]//Proc. of the 8th USA/Europe Air Traffic Management Research and Development Seminar, 2009. |
| 60 | KUCHAR J E. Modifications to ACAS safety study methods for remotely piloted vehicles (RPVs)[R]. Montreal: International Civil Aviation Organization (ICAO), SCRSP/WG A IP/A/7-281, 2004. |
| 61 | KOCHENDERFER M J, ESPINDLE L P, KUCHAR J K, et al. Correlated encounter model for cooperative aircraft in the national airspace system version 1.0[R]. Lexington: Lincoln Laboratory, 2008. |
| 62 | SMITH K A. Collision avoidance system optimization for closely spaced parallel operations through surrogate modeling[D]. Massachusetts: Massachusetts Institute of Technology, 2013. |
| 63 | KOCHENDERFER M J , HOLLAND J E , CHRYSSANTHACOPOULOS J P . Next generation airborne collision avoidance system[J]. Lincoln Laboratory Journal, 2012, 19 (1): 17- 33. |
| 64 | ASMAR D M, KOCHENDERFER M J. Optimized airborne collision avoidance in mixed equipage environments[R]. Massachusetts: Massachusetts Inst, 2013. |
| 65 |
MEHMOOD Y , ASLAM J , ULLAH N , et al. Adaptive robust trajectory tracking control of multiple quad-rotor UAVs with parametric uncertainties and disturbances[J]. Sensors, 2021, 21 (7): 2401.
doi: 10.3390/s21072401 |
| 66 | 周绍磊, 康宇航, 郭志强, 等. 具有通信时延下多无人机编队控制[J]. 科技导报, 2017, 35 (7): 77- 82. |
| ZHOU S L , KANG Y H , GUO Z Q , et al. Formation control of multiple UAVs with communication delays[J]. Science & and Technology Review, 2017, 35 (7): 77- 82. | |
| 67 | 张雷. 多旋翼飞行器分布式编队控制技术研究[D]. 电子科技大学, 2018. |
| ZHANG L. Research on distributed formation control technology of multi rotor aircraft[D]. Chengdu: University of Electronic Science and Technology of China, 2018. | |
| 68 |
王市辉, 代冀阳, 蒋沅, 等. 多无人机协同编队飞行目标跟踪控制仿真[J]. 计算机仿真, 2019, 36 (2): 40- 44.
doi: 10.3969/j.issn.1006-9348.2019.02.010 |
|
WANG S H , DAI J Y , JIANG W , et al. Simulation of multi-UAV cooperative formation flight target tracking control[J]. Computer Simulation, 2019, 36 (2): 40- 44.
doi: 10.3969/j.issn.1006-9348.2019.02.010 |
|
| 69 |
魏扬, 徐浩军, 薛源. 无人机三维编队保持的自适应抗扰控制器设计[J]. 系统工程与电子技术, 2018, 40 (12): 2758- 2765.
doi: 10.3969/j.issn.1001-506X.2018.12.20 |
|
WEI Y , XU H J , XUE Y . Adaptive disturbance rejection controller design for UAV three dimensional formation keeping[J]. Systems Engineering and Electronics, 2018, 40 (12): 2758- 2765.
doi: 10.3969/j.issn.1001-506X.2018.12.20 |
|
| 70 | 沈林成, 王祥科, 朱华勇, 等. 基于拟态物理法的无人机集群与重构控制[J]. 中国科学: 技术科学, 2017, 47 (3): 266- 285. |
| SHEN L C , WANG X K , ZHU H Y , et al. UAVs flocking and reconfiguration control based on artificial physics[J]. Scientia Sinica (Technologica), 2017, 47 (3): 266- 285. | |
| 71 | 吴立尧, 韩维, 张勇, 等. 有人/无人机编队指挥控制系统结构设计[J]. 系统工程与电子技术, 2020, 42 (8): 1826- 1834. |
| WU L R , HAN W , ZHANG Y , et al. Structure design of command and control system for manned/unmanned aerial vehicles formation[J]. Systems Engineering and Electronics, 2020, 42 (8): 1826- 1834. | |
| 72 | 符小卫, 魏可, 李斌, 等. 基于联盟的无人机集群编队控制方法[J]. 系统工程与电子技术, 2019, 41 (11): 2559- 2572. |
| FU X W , WEI K , LI B , et al. Formation control method of UAV cluster based on alliance[J]. Systems Engineering and Electronics, 2019, 41 (11): 2559- 2572. | |
| 73 | WEI L L , CHEN M , LI T . Dynamic event-triggered cooperative formation control for UAVs subject to time-varying disturbances[J]. IET Control Theory & Applications, 2020, 14 (17): 2514- 2525. |
| 74 |
CHEN H , WANG X K , SHEN L C , et al. Formation flight of fixed-wing UAV swarms: a group-based hierarchical approach[J]. Chinese Journal of Aeronautics, 2021, 34 (2): 504- 515.
doi: 10.1016/j.cja.2020.03.006 |
| 75 | WU Y , GOU J Z , HU X T , et al. A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J]. Aerospace Science and Technology, 2021, 107 (12): 106332. |
| [1] | 杨秀霞, 曹唯一, 张毅. 时间和角度约束下的双圆弧路径规划[J]. 系统工程与电子技术, 2019, 41(8): 1835-1843. |
| [2] | 杨秀霞, 张毅, 周硙硙. 一种动态不确定环境下UAV自主避障算法[J]. 系统工程与电子技术, 2017, 39(11): 2546-2552. |
| [3] | 杨秀霞, 周硙硙, 张毅. 基于速度障碍圆弧法的UAV自主避障规划研究[J]. 系统工程与电子技术, 2017, 39(1): 168-176. |
| [4] | 张毅, 杨秀霞, 周硙硙. 基于速度障碍法的多UAV可飞行航迹优化生成[J]. 系统工程与电子技术, 2015, 37(2): 323-330. |
| [5] | 夏青元,徐锦法,张梁. 倾转旋翼飞行器无模型自适应姿态控制[J]. Journal of Systems Engineering and Electronics, 2013, 35(1): 146-151. |
| [6] | 陈凌, 梁加红, 胡志伟, 吴冰. 无人飞行器Ad hoc网络中基于容错的中继节点配置[J]. Journal of Systems Engineering and Electronics, 2012, 34(1): 179-184. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||