
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (12): 3952-3965.doi: 10.12305/j.issn.1001-506X.2025.12.20
• “基于模型的系统架构设计与验证技术”专栏 • 上一篇
刁小龙1, 范厚明1,*, 李阳2, 卞子木1, 魏硕1, 张冰浩1
收稿日期:2025-02-24
修回日期:2025-04-29
出版日期:2025-06-11
发布日期:2025-06-11
通讯作者:
范厚明
作者简介:刁小龙(1993—),男,博士研究生,主要研究方向为交通运输规划与管理基金资助:Xiaolong DIAO1, Houming FAN1,*, Yang LI2, Zimu BIAN1, Shuo WEI1, Binghao ZHANG1
Received:2025-02-24
Revised:2025-04-29
Online:2025-06-11
Published:2025-06-11
Contact:
Houming FAN
摘要:
为提高封闭与开放场景中两级无人车的协同配送效率,考虑两级无人车之间不同的转运货物方式,设计配送网络并构建两级无人车路径优化模型。针对模型求解,设计改进的变邻域搜索算法,算法中设置了多种变邻域算子,并且提出贪婪算法保留不可行解进入子代种群的策略和自适应策略以调节迭代寻优过程。多组算例实验表明,所提算法及算法策略能够提高问题求解的效率。该研究成果可为封闭与开放场景下两级无人车配送路径优化方案的制定提供参考。
中图分类号:
刁小龙, 范厚明, 李阳, 卞子木, 魏硕, 张冰浩. 封闭与开放场景下两级无人车协同配送路径优化[J]. 系统工程与电子技术, 2025, 47(12): 3952-3965.
Xiaolong DIAO, Houming FAN, Yang LI, Zimu BIAN, Shuo WEI, Binghao ZHANG. Two-echelon unmanned vehicles collaborative delivery routing optimization in closed and open scenes[J]. Systems Engineering and Electronics, 2025, 47(12): 3952-3965.
表1
相近研究对比"
| 文献 | A | B | C | D | E | F | 目标 | 模型 | 求解方法 |
| [ | Y | N | N | N | N | Y | 成本最小 | 混合整数 | Gurobi和Spreadsheet求解器 |
| [ | Y | N | N | N | N | N | 成本最小 | 混合整数 | 遗传算法和Concorde求解器 |
| [ | Y | N | N | N | N | N | 成本最小与客户满意度最大 | 混合整数 | 改进的非支配排序遗传算法-II |
| [ | Y | N | N | N | N | N | 成本最小 | 混合整数 | 分支定价算法 |
| [ | N | N | Y | N | N | Y | 配送时间 | 混合整数 | 两阶段启发式算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 启发式算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 变邻域搜索算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 启发式算法 |
| [ | N | Y | Y | Y | N | Y | 成本最小 | 混合整数 | 自适应大邻域搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 改进的变邻域搜索算法 |
| [ | N | Y | Y | N | N | Y | 迟到配送客户数最小 | 混合整数 | 局部搜索算法 |
| [ | N | Y | Y | Y | N | Y | 成本最小 | 混合整数 | 混合多起点启发式算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 自适应大邻域搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 贪婪随机自适应搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 基于聚类的变邻域搜索算法 |
| 本文 | Y | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 改进的变邻域搜索算法 |

图1
两级无人车配送网络"
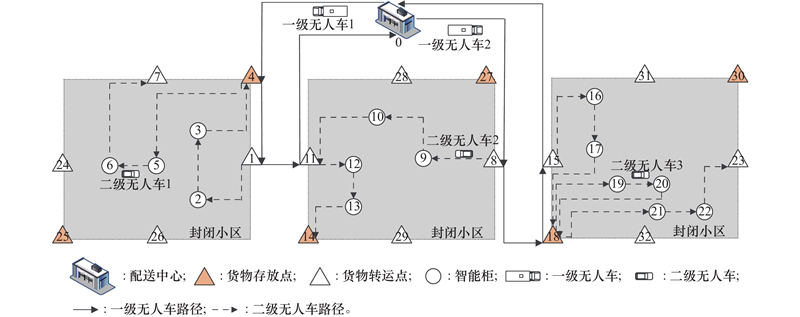
表2
"
| 集合 | 说明 |
| 封闭小区集合, | |
| 一级无人车集合, | |
| 二级无人车集合, | |
| 节点集合, | |
| 二级无人车配送次序集合,二级无人车从某一货物存放点或货物转运点出发,完成配送任务返回到某一货物存放点或货物转运点视为一次配送。 |
表3
参数符号说明"
| 参数 | 说明 |
| 配送中心的工作时间窗 | |
| 智能柜 | |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车在货物转运点的最大等待时间 | |
| 点 | |
| 一级无人车的平均速度 | |
| 二级无人车的平均速度 | |
| 一个比较大的正数 | |
| 一级无人车在货物存放点卸下单位货物所需时间 | |
| 一级与二级无人车在货物转运点转运单位货物所需时间 | |
| 二级无人车在货物存放点装载单位货物所需时间 | |
| 二级无人车在智能柜卸下货物所需时间 | |
| 单位一级无人车派遣成本 | |
| 一级无人车单位距离的运输成本 | |
| 货物存放点存放单位货物产生的存储成本 | |
| 二级无人车单位距离的运输成本 |
表4
中间变量符号说明"
| 中间变量 | 说明 |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车 | |
| 一级无人车 | |
| 二级无人车 | |
| 二级无人车 |
表5
决策变量符号说明"
| 决策变量 | 说明 |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车 | |
| 二级无人车 |
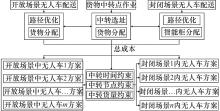
图2
建模思路"
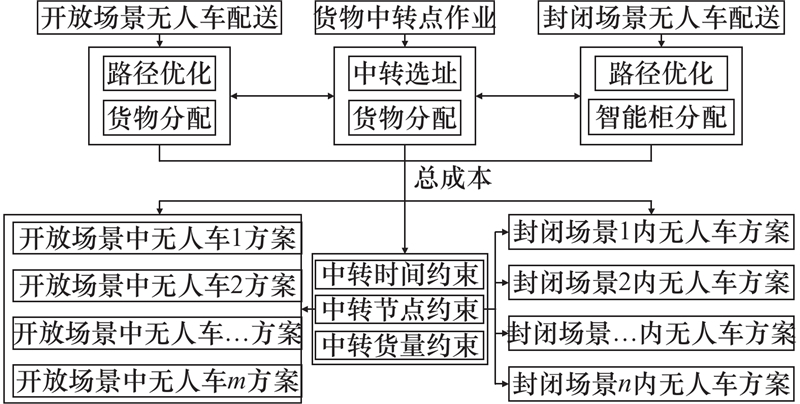
图3
算法框架"
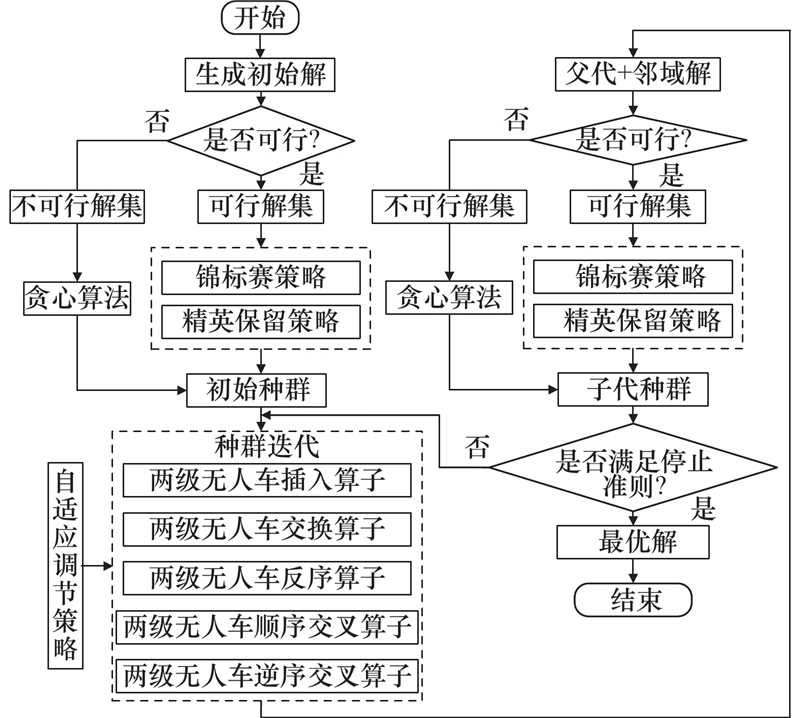
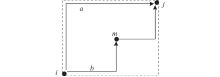
图4
定理示例"
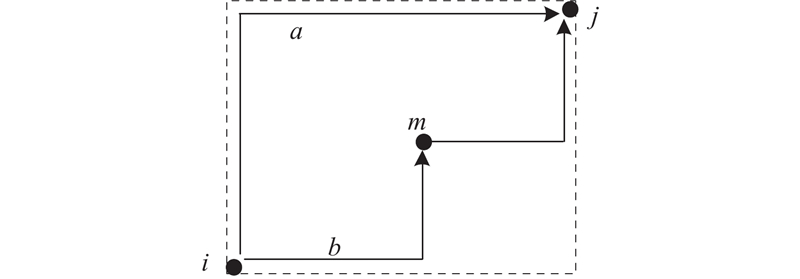

图5
算子示例"
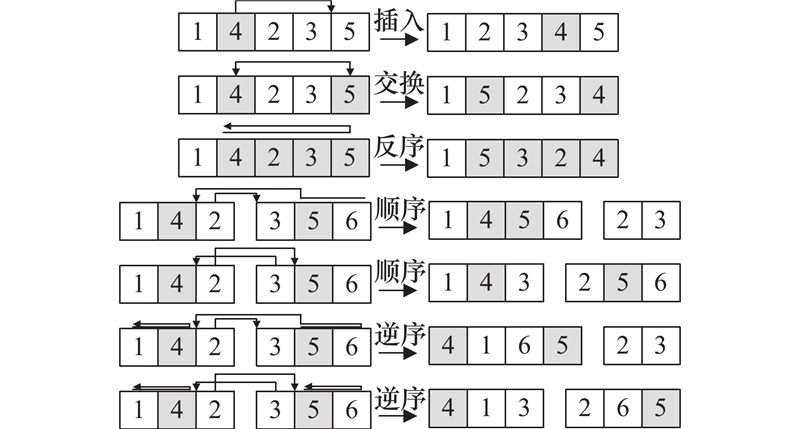
表6
不同算法的求解结果"
| 算例 | INSA | GRASP | 本文算法 | ||||||||||||||
| Avg | Min | Max | Time/s | GAP | Avg | Min | Max | Time/s | GAP | Avg | Min | Max | Time/s | GAP | |||
| A1 | 7.3 | 0.007 | 2.6 | 0.007 | 5.7 | 0.006 | |||||||||||
| A2 | 7.3 | 0.012 | 2.6 | 0.005 | 5.3 | 0.013 | |||||||||||
| A3 | 7.9 | 0.017 | 1.9 | 0.012 | 5.2 | 0.013 | |||||||||||
| A4 | 6.2 | 0.008 | 2.1 | 0.006 | 4.6 | 0.001 | |||||||||||
| B1 | 6.7 | 0.026 | 1.8 | 0.007 | 4.2 | 0.019 | |||||||||||
| B2 | 6.2 | 0.059 | 2.1 | 0.007 | 4.9 | 0.029 | |||||||||||
| B3 | 6.4 | 0.009 | 2.3 | 0.011 | 4.7 | 0.011 | |||||||||||
| B4 | 7.1 | 0.012 | 2.1 | 0.016 | 4.7 | 0.009 | |||||||||||
| C1 | 5.8 | 0.033 | 1.8 | 0.015 | 4.0 | 0.028 | |||||||||||
| C2 | 6.9 | 0.021 | 1.9 | 0.008 | 4.2 | 0.025 | |||||||||||
| C3 | 6.4 | 0.031 | 1.9 | 0.016 | 4.4 | 0.036 | |||||||||||
| C4 | 7.1 | 0.019 | 2.6 | 0.020 | 5.4 | 0.017 | |||||||||||
| A5 | 31.3 | 0.048 | 16.4 | 0.043 | 20.3 | 0.045 | |||||||||||
| A6 | 37.9 | 0.035 | 17.3 | 0.030 | 21.7 | 0.019 | |||||||||||
| A7 | 40.2 | 0.034 | 19.6 | 0.034 | 25.0 | 0.033 | |||||||||||
| A8 | 32.5 | 0.028 | 16.4 | 0.037 | 20.0 | 0.030 | |||||||||||
| B5 | 33.5 | 0.056 | 12.7 | 0.040 | 16.0 | 0.043 | |||||||||||
| B6 | 29.0 | 0.048 | 15.6 | 0.043 | 17.6 | 0.046 | |||||||||||
| B7 | 29.0 | 0.044 | 16.7 | 0.026 | 20.7 | 0.047 | |||||||||||
| B8 | 31.6 | 0.054 | 15.8 | 0.032 | 19.9 | 0.064 | |||||||||||
| C5 | 36.3 | 0.051 | 15.8 | 0.039 | 20.6 | 0.045 | |||||||||||
| C6 | 33.2 | 0.062 | 15.7 | 0.034 | 19.4 | 0.054 | |||||||||||
| C7 | 32.2 | 0.038 | 15.3 | 0.044 | 18.5 | 0.058 | |||||||||||
| C8 | 32.5 | 0.054 | 15.3 | 0.055 | 18.7 | 0.049 | |||||||||||
| A9 | 71.3 | 0.042 | 45.7 | 0.040 | 56.4 | 0.046 | |||||||||||
| A10 | 92.2 | 0.064 | 47.8 | 0.070 | 60.8 | 0.057 | |||||||||||
| A11 | 88.1 | 0.047 | 47.8 | 0.050 | 59.3 | 0.048 | |||||||||||
| A12 | 89.8 | 0.068 | 45.9 | 0.073 | 56.8 | 0.047 | |||||||||||
| B9 | 90.3 | 0.063 | 43.4 | 0.083 | 50.7 | 0.049 | |||||||||||
| B10 | 89.6 | 0.040 | 45.8 | 0.055 | 56.0 | 0.047 | |||||||||||
| B11 | 88.6 | 0.061 | 45.8 | 0.080 | 54.0 | 0.052 | |||||||||||
| B12 | 87.8 | 0.056 | 47.8 | 0.060 | 57.7 | 0.057 | |||||||||||
| C9 | 96.1 | 0.069 | 47.9 | 0.053 | 61.0 | 0.070 | |||||||||||
| C10 | 92.5 | 0.054 | 47.9 | 0.055 | 62.8 | 0.060 | |||||||||||
| C11 | 68.4 | 0.062 | 42.5 | 0.062 | 49.4 | 0.052 | |||||||||||
| C12 | 78.9 | 0.076 | 45.3 | 0.064 | 55.8 | 0.073 | |||||||||||
表7
不同策略的求解结果"
| 算例 | S1 | S2 | S3 | S4 | |||||||
| Avg | Time/s | Avg | Time/s | Avg | Time/s | Avg | Time/s | ||||
| A1 | 3.1 | 3.2 | 5.6 | 5.7 | |||||||
| A2 | 4.0 | 4.1 | 5.3 | 5.3 | |||||||
| A3 | 3.4 | 3.5 | 4.7 | 5.2 | |||||||
| A4 | 2.9 | 3.2 | 4.5 | 4.6 | |||||||
| B1 | 3.4 | 3.5 | 4.1 | 4.2 | |||||||
| B2 | 4.0 | 3.7 | 4.9 | 4.9 | |||||||
| B3 | 3.2 | 3.2 | 4.7 | 4.7 | |||||||
| B4 | 3.5 | 3.7 | 4.9 | 4.7 | |||||||
| C1 | 2.9 | 3.0 | 3.7 | 4.0 | |||||||
| C2 | 2.6 | 2.7 | 4.3 | 4.2 | |||||||
| C3 | 3.4 | 3.5 | 4.2 | 4.4 | |||||||
| C4 | 4.1 | 4.2 | 5.5 | 5.4 | |||||||
| A5 | 15.5 | 16.8 | 20.3 | 20.3 | |||||||
| A6 | 17.2 | 17.6 | 21.5 | 21.7 | |||||||
| A7 | 20.2 | 21.0 | 25.0 | 25.0 | |||||||
| A8 | 15.5 | 16.9 | 20.0 | 20.0 | |||||||
| B5 | 13.1 | 13.3 | 15.0 | 16.0 | |||||||
| B6 | 14.4 | 15.0 | 17.7 | 17.6 | |||||||
| B7 | 15.1 | 15.7 | 20.1 | 20.7 | |||||||
| B8 | 14.2 | 15.0 | 19.7 | 19.9 | |||||||
| C5 | 15.0 | 15.3 | 20.8 | 20.6 | |||||||
| C6 | 14.1 | 14.1 | 19.5 | 19.4 | |||||||
| C7 | 14.1 | 14.2 | 18.5 | 18.5 | |||||||
| C8 | 14.2 | 15.1 | 18.6 | 18.7 | |||||||
| A9 | 39.6 | 41.7 | 56.4 | 56.4 | |||||||
| A10 | 13.2 | 43.2 | 59.7 | 60.8 | |||||||
| A11 | 43.2 | 43.2 | 59.5 | 59.3 | |||||||
| A12 | 42.0 | 43.0 | 56.8 | 56.8 | |||||||
| B9 | 38.6 | 39.7 | 49.9 | 50.7 | |||||||
| B10 | 38.7 | 41.4 | 54.7 | 56.0 | |||||||
| B11 | 37.7 | 40.1 | 54.0 | 54.0 | |||||||
| B12 | 42.2 | 43.3 | 57.8 | 57.7 | |||||||
| C9 | 45.5 | 47.3 | 60.3 | 61.0 | |||||||
| C10 | 45.5 | 48.6 | 64.0 | 62.8 | |||||||
| C11 | 34.0 | 34.5 | 48.0 | 49.4 | |||||||
| C12 | 35.8 | 37.5 | 52.3 | 55.8 | |||||||
表8
两种方法的求解结果"
| 算例 | 方法 | 不可行解比例 | |||||||
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | ||
| A2 | T1 | ||||||||
| T2 | |||||||||
| B1 | T1 | ||||||||
| T2 | |||||||||
| C4 | T1 | ||||||||
| T2 | |||||||||
| A6 | T1 | ||||||||
| T2 | |||||||||
| B5 | T1 | ||||||||
| T2 | |||||||||
| C8 | T1 | ||||||||
| T2 | |||||||||
| A10 | T1 | ||||||||
| T2 | |||||||||
| B11 | T1 | ||||||||
| T2 | |||||||||
| C12 | T1 | ||||||||
| T2 | |||||||||
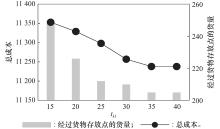
图6
A4关于${t_{{k_1}}}$的敏感性分析图"
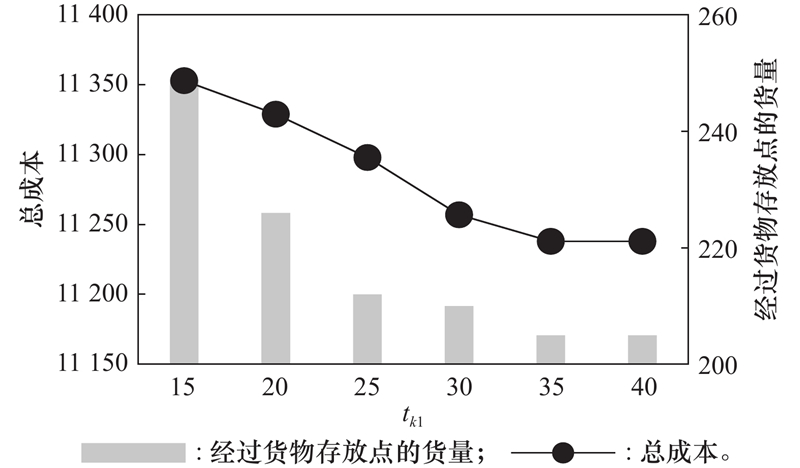
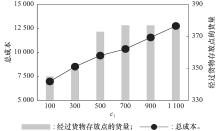
图7
C8关于${c_1}$的敏感性分析图"
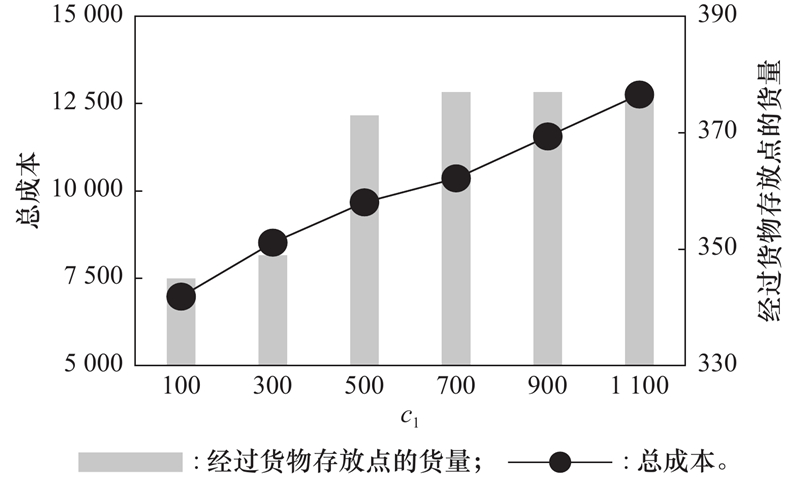
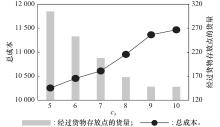
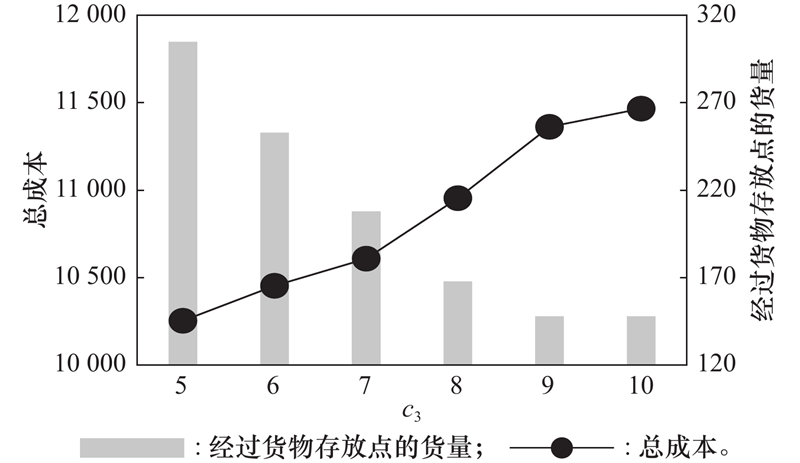
图8
B8关于${c_3}$的敏感性分析图"
| 1 | HU R, TANG Z Q, LIU F X, et al. Optimization of contactless distribution of medical protective materials during the outbreak of spreading epidemic disease[J]. Chinese Journal of Management Science, 2023, 31 (5): 152- 163. |
| 2 | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30 (6): 1- 197. |
| Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30 (6): 1- 197. | |
| 3 | 徐进, 陈钦, 陈正委, 等. 适应无人驾驶汽车的道路设施设计综述[J]. 西南交通大学学报, 2023, 58 (6): 1366- 1377. |
| XU J, CHEN Q, CHEN Z W, et al. Review of roadway facility design for self-driving cars[J]. Journal of Southwest Jiaotong University, 2023, 58 (6): 1366- 1377. | |
| 4 |
XI H, RAYAN H A. The use of unmanned ground vehicles (mobile robots) and unmanned aerial vehicles (drones) in the civil infrastructure asset management sector: applications, robotic platforms, sensors, and algorithms[J]. Expert Systems with Applications, 2023, 232, 120897.
doi: 10.1016/j.eswa.2023.120897 |
| 5 |
LURII B, ANN M C, JAN F E. A two-tier urban delivery network with robot-based deliveries[J]. Networks, 2021, 78 (4): 461- 483.
doi: 10.1002/net.22024 |
| 6 | PETRICA C P, LEVENTE F, ANDREI H M, et al. A novel two-level optimization approach for clustered vehicle routing problem[J]. Computer & Industrial Engineering, 2018, 115 (1): 304- 318. |
| 7 |
WANG Y, ASSOGBA K, LIU Y, et al. Two-echelon location-routing optimization with time windows based on customer clustering[J]. Expert Systems with Applications, 2018, 104, 244- 260.
doi: 10.1016/j.eswa.2018.03.018 |
| 8 |
DELLAERT N, SARIDARQ D F, WOENSEL V T, et al. Branch-and-price-based algorithms for the two-echelon vehicle routing problem with time windows[J]. Transportation Science, 2019, 53 (2): 319- 622.
doi: 10.1287/trsc.2018.0836 |
| 9 | MANUEL O, ANDREAS H, ALEXANDER H. Cost-optimal truck-and-robot routing for last-mile delivery[J]. Networks, 2023, 79 (3): 364- 389. |
| 10 |
CHENG C, EMRAH D, YUAN H, et al. The adoption of self-driving delivery robots in last mile logistics[J]. Transportation Research Part E: Logistics and Transportation Review, 2021, 146, 102214.
doi: 10.1016/j.tre.2020.102214 |
| 11 |
ANDREAS H, MANUEL O, ALEXANDER H. A mixed truck and robot delivery approach for the daily supply of customers[J]. European Journal of Operational Research, 2022, 303 (1): 401- 421.
doi: 10.1016/j.ejor.2022.02.028 |
| 12 |
SCHERR O Y, SAAVEDRA N A B, HEWITT M, et al. Service network design with mixed autonomous fleets[J]. Transportation Research Part E: Logistics and Transportation Review, 2019, 124, 40- 55.
doi: 10.1016/j.tre.2019.02.001 |
| 13 |
MANUEL O, ANDREAS H, ALEXANDER H. The multi-vehicle truck-and-robot routing problem for last-mile delivery[J]. European Journal of Operational Research, 2023, 310 (2): 680- 697.
doi: 10.1016/j.ejor.2023.03.031 |
| 14 |
YU S H, PUCHINGER J, SUN S D. Electric van-based robot deliveries with en-route charging[J]. European Journal of Operational Research, 2024, 317 (3): 806- 826.
doi: 10.1016/j.ejor.2022.06.056 |
| 15 |
MOKHTARI M A, SALHI A, YANG X, et al. A multi-objective approach for the integrated planning of drone and robot assisted truck operations in last-mile delivery[J]. Expert Systems with Applications, 2025, 269, 126434.
doi: 10.1016/j.eswa.2025.126434 |
| 16 |
MAIO A D, GHIANI G, DEMETRIO L, et al. Sustainable last-mile distribution with autonomous delivery robots and public transportation[J]. Transportation Research Part C: Emerging Technologies, 2024, 163, 104615.
doi: 10.1016/j.trc.2024.104615 |
| 17 |
SIMONI M D, KUTANOGLU E, CLAUDEL C G. Optimization and analysis of a robot-assisted last mile delivery system[J]. Transportation Research Part E: Logistics and Transportation Review, 2020, 142, 102049.
doi: 10.1016/j.tre.2020.102049 |
| 18 | CHEN Y, CHEN M Q, CHEN Z H, et al. Delivery path planning of heterogeneous robot system under road network constraints[J]. Computers & Electrical Engineering, 2021, 92, 107197. |
| 19 |
CHEN C, DEMIR E, HUANG Y. An adaptive large neighborhood search heuristic for the vehicle routing problem with time windows and delivery robots[J]. European Journal of Operational Research, 2021, 294 (3): 1164- 1180.
doi: 10.1016/j.ejor.2021.02.027 |
| 20 |
YU S H, PUCHINGER J, SUN S D. Van-based robot hybrid pickup and delivery routing problem[J]. European Journal of Operational Research, 2022, 298 (3): 894- 914.
doi: 10.1016/j.ejor.2021.06.009 |
| 21 |
DIAO X L, FAN H M, ZHU X Y, et al. Multi-depot routing problem with van-based driverless vehicles[J]. Scientific Reports, 2024, 14, 19807.
doi: 10.1038/s41598-024-70781-0 |
| 22 |
VENKATA S C, SUNDAR K, VENKATACHALAM S, et al. Heuristics for multi-vehicle routing problem considering human-robot interactions[J]. IEEE Trans. on Intelligent Vehicles, 2023, 8 (5): 3228- 3238.
doi: 10.1109/TIV.2023.3261274 |
| 23 |
JENNINGS D, FIGLIOZZI M. Study of sidewalk autonomous delivery robots and their potential impacts on freight efficiency and travel[J]. Transportation Research Record, 2019, 2673 (6): 317- 326.
doi: 10.1177/0361198119849398 |
| 24 |
ALFANDARI L, LJUBI I, SILVA M D. A tailored Benders decomposition approach for last-mile delivery with autonomous robots[J]. European Journal of Operational Research, 2022, 299 (2): 510- 525.
doi: 10.1016/j.ejor.2021.06.048 |
| 25 |
LIU D, DENG Z H, MAO X H, et al. Two-echelon vehicle-routing problem: Optimization of autonomous delivery vehicle-assisted E-grocery distribution[J]. IEEE Access, 2020, 8, 108705- 108719.
doi: 10.1109/ACCESS.2020.3001753 |
| 26 | JINGI A M, YANG X. Robot-assisted delivery problems and their exact solutions[C]//Proc. of the International Conference on Optimization and Learning, 2023: 341−353. |
| 27 | 雷勤, 高颜兵, 周煜丰, 等. 基于改进ALNS算法的多交付选项路径规划[J]. 系统工程与电子技术, 2025, 47 (1): 173- 181. |
| LEI Q, GAO Y B, ZHOU Y F, et al. Multi-delivery option path planning based on improved ALNS algorithm[J]. Systems Engineering and Electronics, 2025, 47 (1): 173- 181. | |
| 28 | 唐开强, 傅汇乔, 刘佳生, 等. 基于深度强化学习的带约束车辆路径分层优化研究[J]. 系统工程与电子技术, 2025, 47 (3): 827- 841. |
| TANG K Q, FU H Q, LIU J S, et al. Hierarchical optimization research of constrained vehicle routing based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2025, 47 (3): 827- 841. | |
| 29 |
NILS B, STEFAN S, FELIX W. Scheduling last-mile deliveries with truck-based autonomous robots[J]. European Journal of Operation Research, 2018, 271 (3): 1085- 1099.
doi: 10.1016/j.ejor.2018.05.058 |
| 30 |
YU S H, PUCHINGER J, SUN S. Two-echelon urban deliveries using autonomous vehicles[J]. Transportation Research Part E: Logistics and Transportation Review, 2020, 141, 102018.
doi: 10.1016/j.tre.2020.102018 |
| 31 |
PHILIPPE G, MICHEL G, FABIEN L, et al. An adaptive large neighborhood search for the two-echelon multiple-trip vehicle routing problem with satellite synchronization[J]. European Journal of Operation Research, 2016, 254 (1): 80- 91.
doi: 10.1016/j.ejor.2016.03.040 |
| 1 | 胡卉, 唐子淇, 刘富鑫, 等. 疫情下医用防护物资“无接触”配送优化[J]. 中国管理科学, 2023, 31 (5): 152- 163. |
| 32 |
ALEXANDRA A, VERA C H, PAMELA C N. Synchronizing vans and cargo bikes in a city distribution network[J]. Central European Journal of Operations Research, 2017, 25 (2): 345- 376.
doi: 10.1007/s10100-016-0441-z |
| 33 | SUTRISNO H, YANG C L. A two-echelon location routing problem with mobile satellites for last-mile delivery: mathematical formulation and clustering-based heuristic method[J]. Annals of Operations Research, 2023, 323 (1): 203- 228. |
| 34 |
ZUO X R, XIAO Y Y, YOU M, et al. A new formulation of the electric vehicle routing problem with time windows considering concave nonlinear charging function[J]. Journal of Cleaner Production, 2019, 236, 117687.
doi: 10.1016/j.jclepro.2019.117687 |
| 35 | 刁小龙. 基于存储点联合调度的社区无人车配送问题研究[J]. 系统仿真学报, 2025, 37 (1): 284- 298. |
| DIAO X L. Driverless vehicles distribution problem in communities in cooperation of storage points[J]. Journal of System Simulation, 2025, 37 (1): 284- 298. | |
| 36 | 骆承钦, 胡志庠, 靳全勤. 线性代数[M]. 6版. 上海: 高等教育出版社, 2014. |
| LUO C Q, HU Z X, JIN Q Q. Linear algebra[M]. 6th ed. Shanghai: Higher Education Press, 2014. |
| [1] | 方伟, 张龄之. 基于多目标演化的模糊认知图学习算法[J]. 系统工程与电子技术, 2018, 40(2): 447-455. |
| [2] | 王兴元, 张鹏. 基于细致化仿生的改进粒子群优化算法[J]. Journal of Systems Engineering and Electronics, 2012, 34(7): 1484-1492. |
| [3] | 毕晓君, 王艳娇. 用于多峰函数优化的小生境人工蜂群算法[J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2564-2568. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||