
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (8): 2715-2726.doi: 10.12305/j.issn.1001-506X.2025.08.29
• 制导、导航与控制 • 上一篇
姬博洋, 李炯, 贺杨超, 叶继坤, 雷虎民
收稿日期:2024-10-14
出版日期:2025-08-25
发布日期:2025-09-04
通讯作者:
叶继坤
作者简介:姬博洋(2001—),男,博士研究生,主要研究方向为再入滑翔目标轨迹生成、空天拦截器制导控制与仿真、智能博弈基金资助:Boyang JI, Jiong LI, Yangchao HE, Jikun YE, Humin LEI
Received:2024-10-14
Online:2025-08-25
Published:2025-09-04
Contact:
Jikun YE
摘要:
针对再入滑翔飞行器(reentry gliding vehicle,RGV)规避禁飞区的问题,提出一种基于最小代价准则的RGV制导方法。基于图论思想,引入规避时机判断准则,实现制导逻辑和规避逻辑的动态切换。在制导逻辑中,依据距离目标点的剩余航程设计分段式航向角偏差角走廊,提高制导精度。在规避逻辑中,设计规避策略和补偿策略。规避时统一量化飞行器的规避代价和制导代价,依据最小代价准则决定倾侧角符号,同时为降低能量损耗,求解恰好规避时的倾侧角幅值实现倾侧角的自适应变化。为避免倾侧角符号的频繁偏转,对航向角偏差走廊进行自适应补偿。该制导方法旨在解决规避任务与制导任务相冲突、多禁飞区叠加影响时的规避决策问题。仿真结果表明,和传统方法相比所提制导方法可以实现最小代价的多禁飞区规避,且具有更高的制导精度,算法具有一定的鲁棒性。
中图分类号:
姬博洋, 李炯, 贺杨超, 叶继坤, 雷虎民. 基于最小代价准则的再入滑翔制导方法[J]. 系统工程与电子技术, 2025, 47(8): 2715-2726.
Boyang JI, Jiong LI, Yangchao HE, Jikun YE, Humin LEI. Reentry gliding vehicle guidance method based on min-cost criterion[J]. Systems Engineering and Electronics, 2025, 47(8): 2715-2726.

图1
最小代价规避示意图"
图2
参数定义图"

图3
单禁飞区最小代价示意图"

图4
多禁飞区最小代价示意图"

图5
航向角补偿示意图"
图6
分段式航向角偏差走廊"
表1
飞行器初始再入状态"
| 状态名称 | 值 |
| 高度 | 60.0 |
| 速度 | |
| 经度/(°) | 0.0 |
| 纬度/(°) | 0.0 |
| 航迹角/(°) | −0.1 |
| 航向角/(°) | 60.0 |
表2
飞行器再入过程约束"
| 状态名称 | 值 |
| 动压 | 100 |
| 3 |
表3
飞行器终端状态约束"
| 状态名称 | 值 |
| 高度 | 25.0 |
| 速度 | |
| 经度/(°) | 28.0 |
| 纬度/(°) | 28.0 |
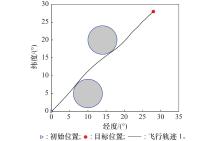
图7
算例1二维轨迹制导图"
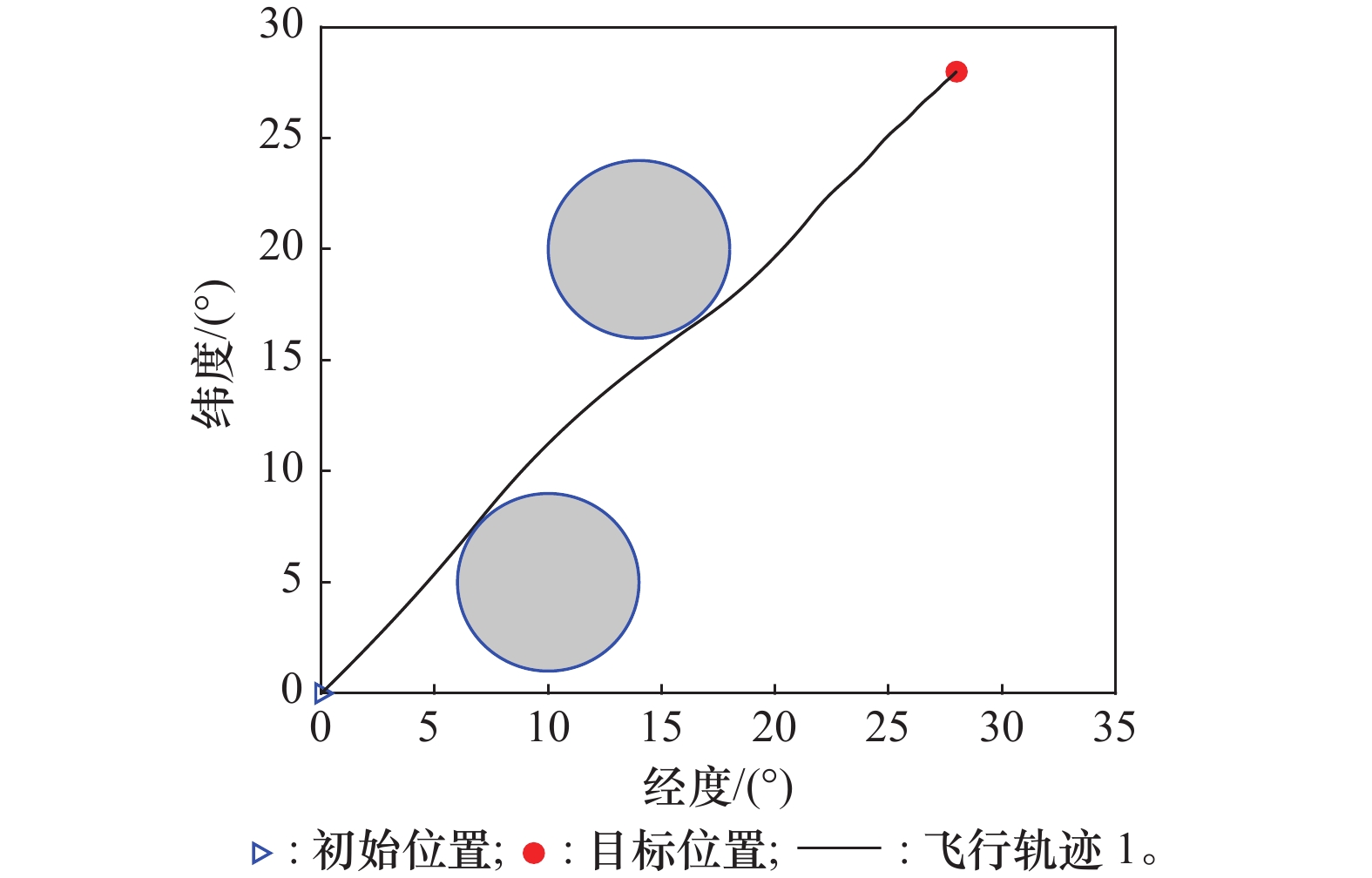
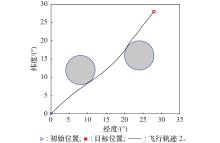
图8
算例2二维轨迹制导图"
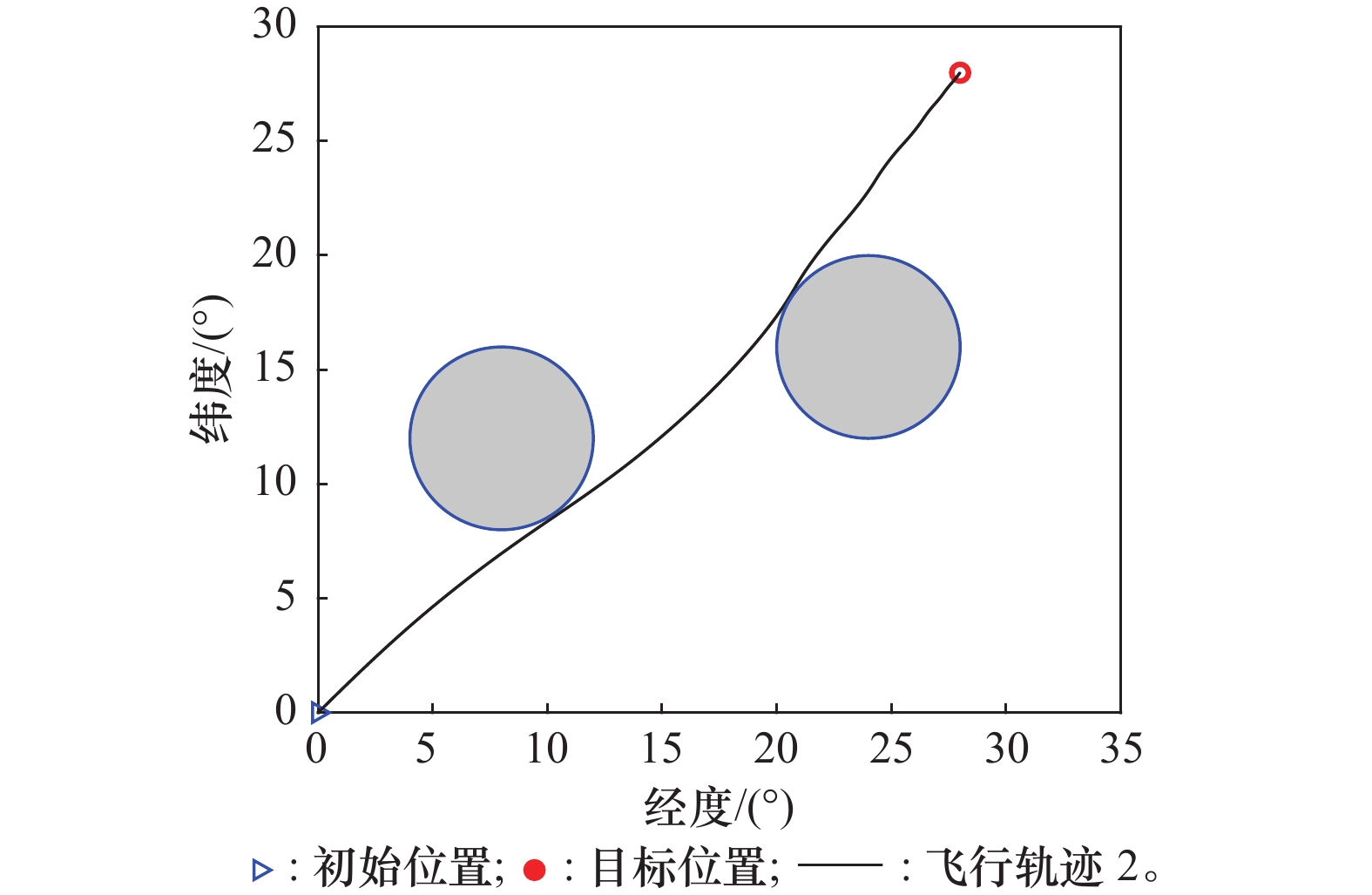
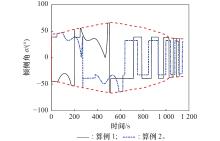
图9
倾侧角变化曲线"
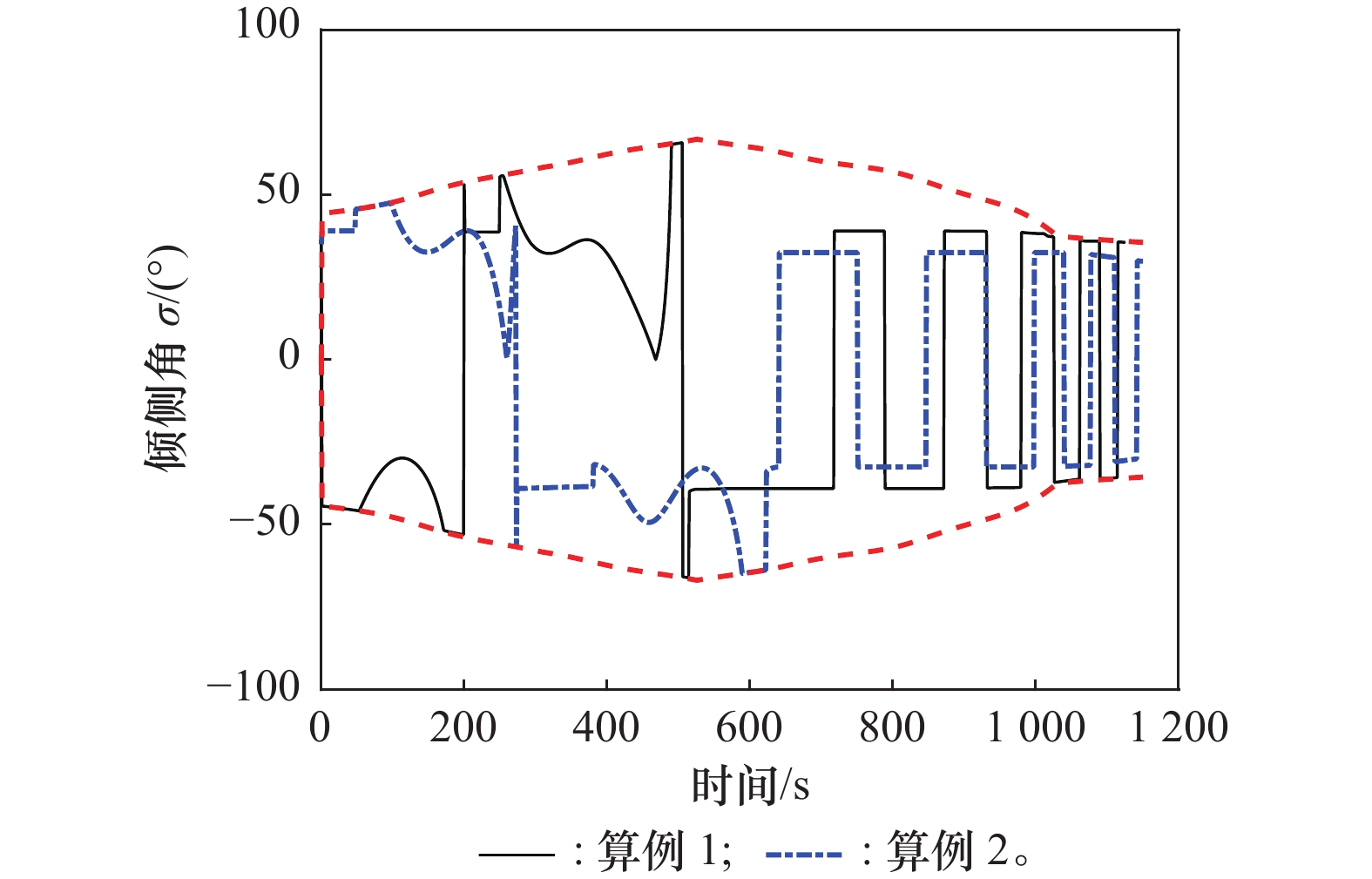
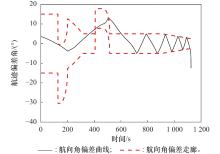
图10
算例1航向角偏差及走廊变化曲线"
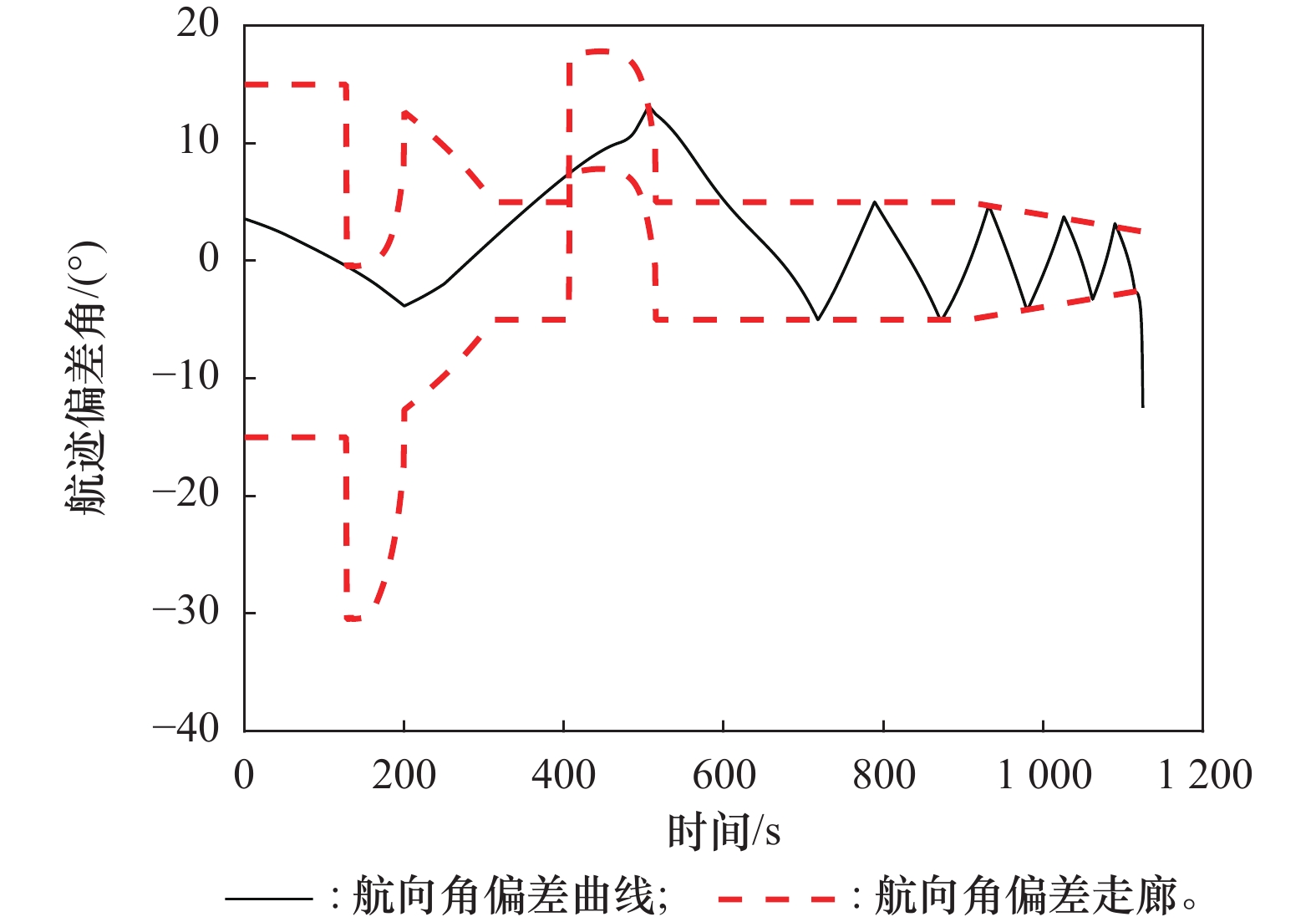
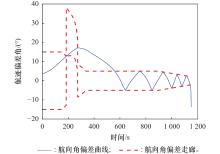
图11
算例2航向角偏差及走廊变化曲线"
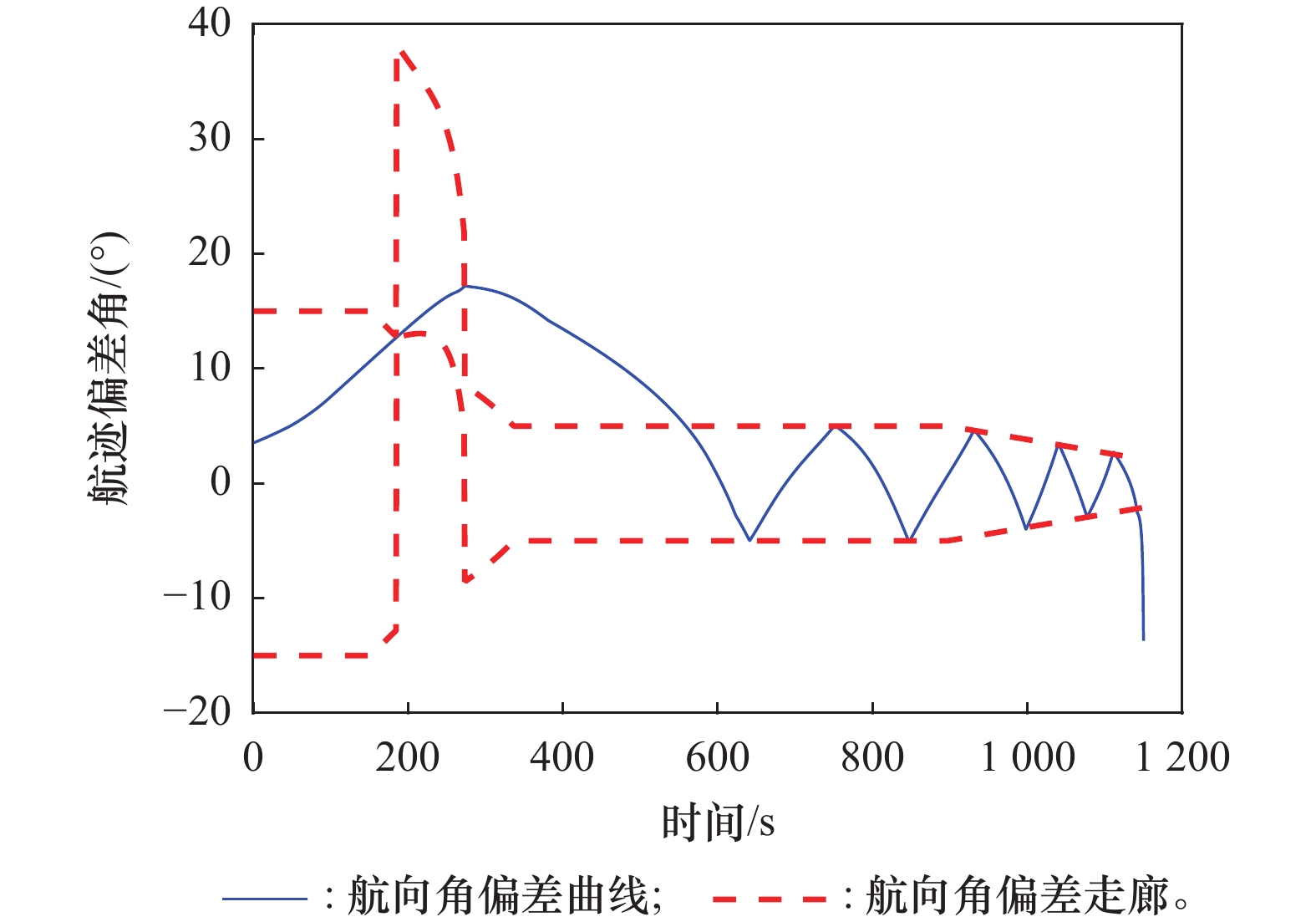
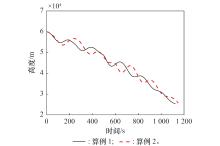
图12
高度变化曲线"
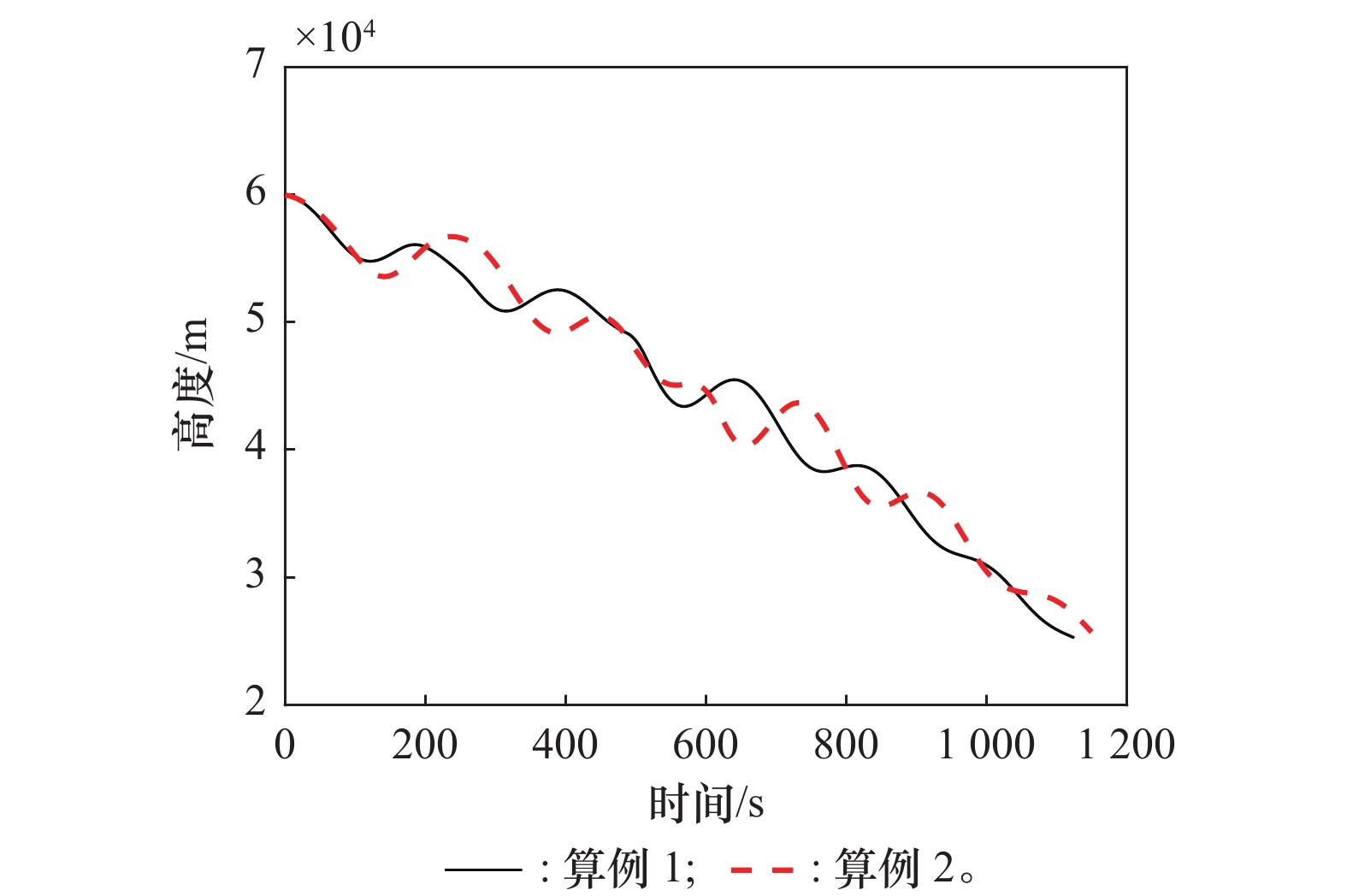
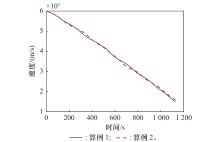
图13
速度变化曲线"
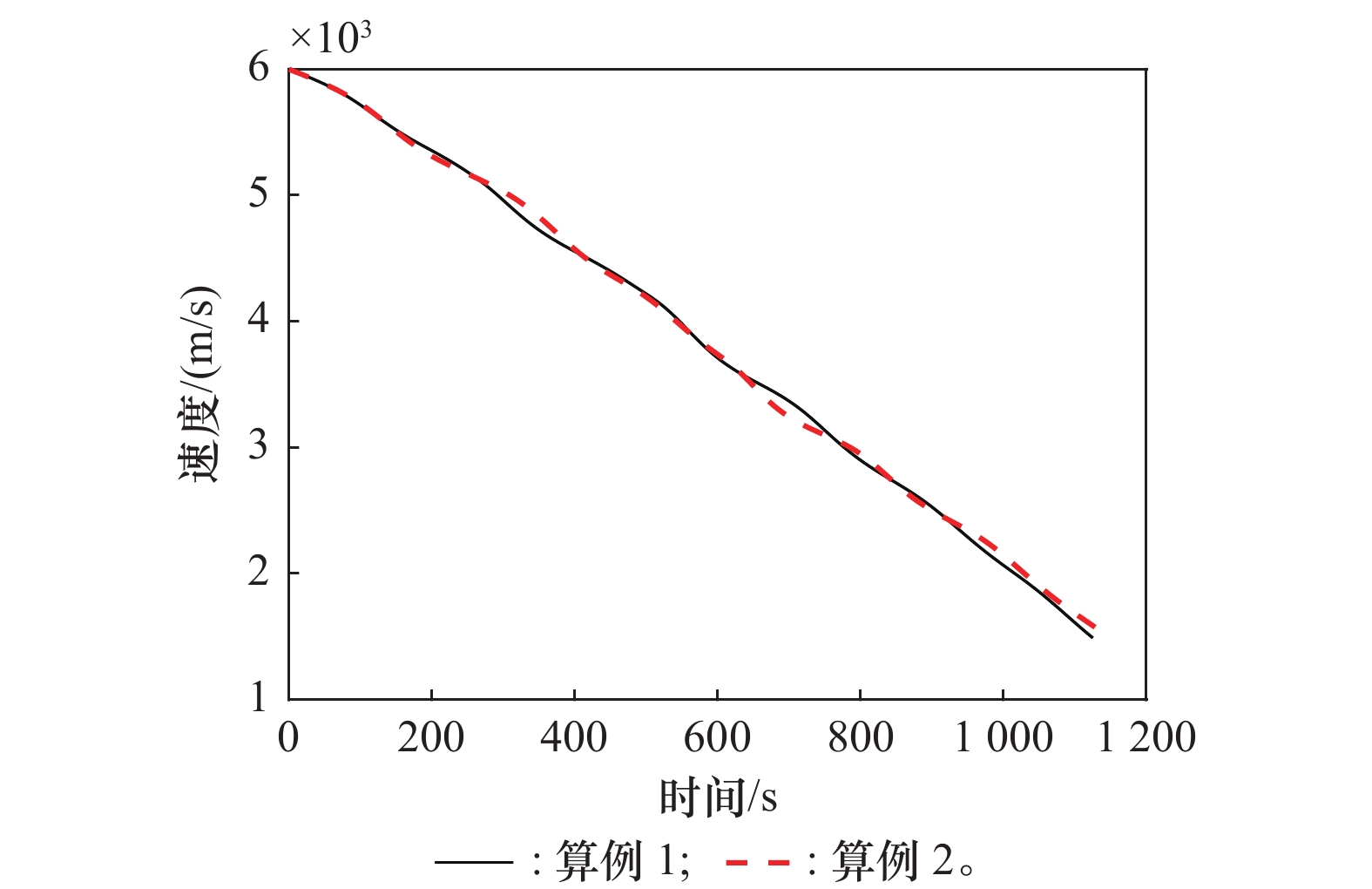
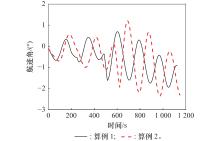
图14
航迹角变化曲线"
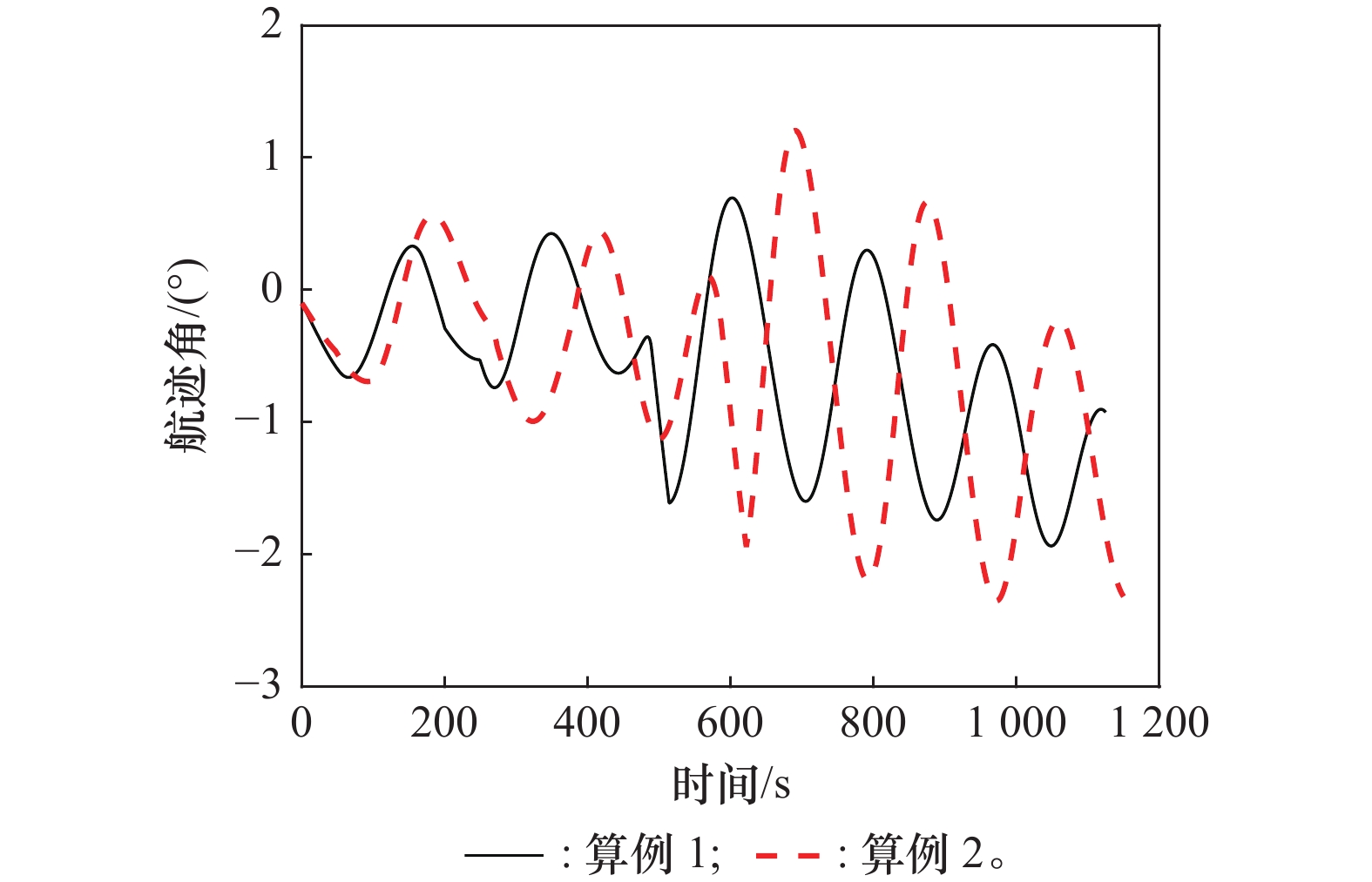
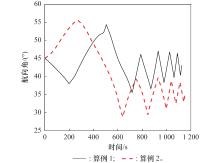
图15
航向角变化曲线"
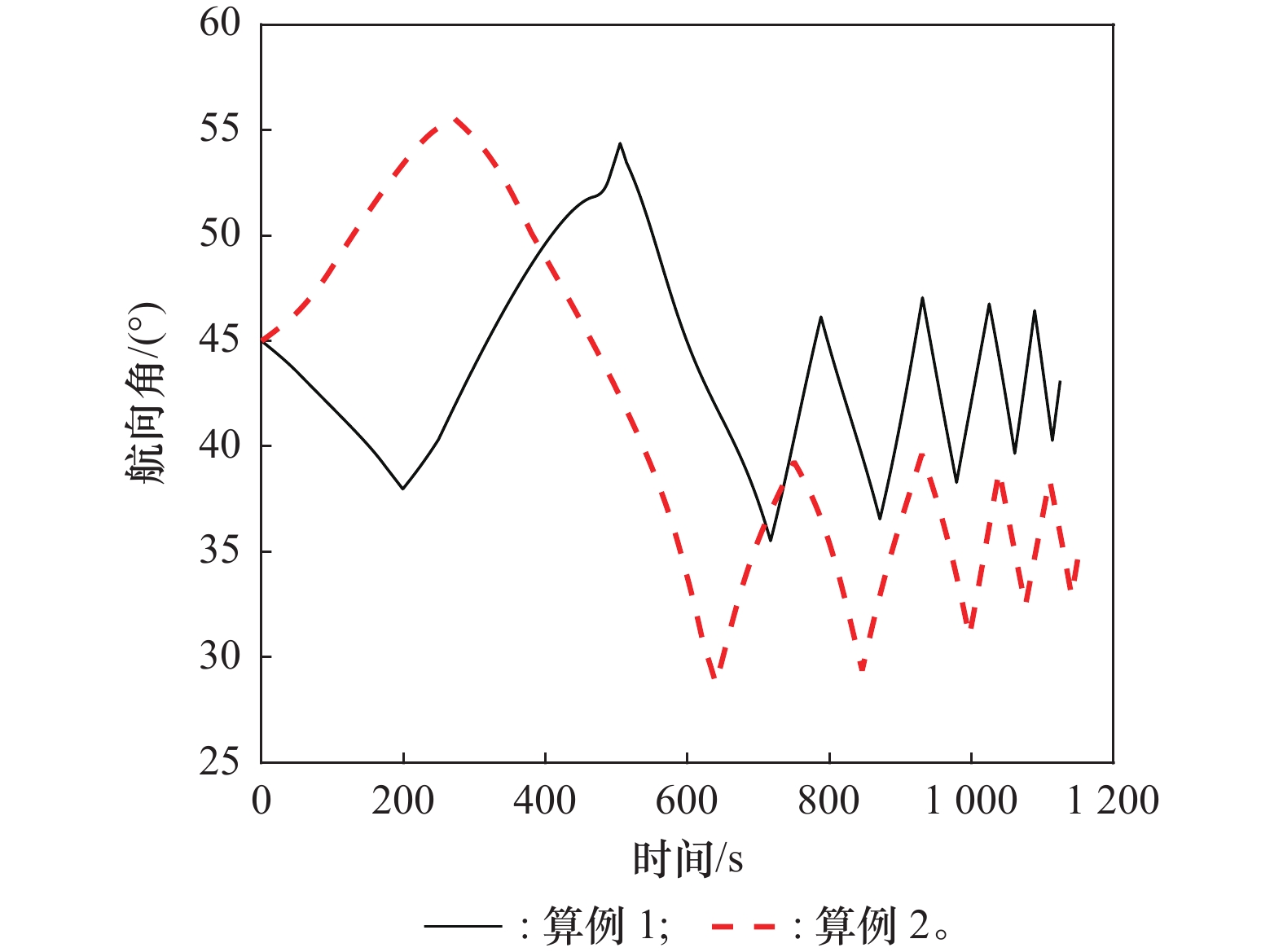
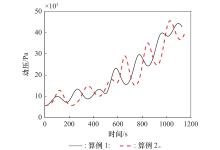
图16
动压变化曲线"
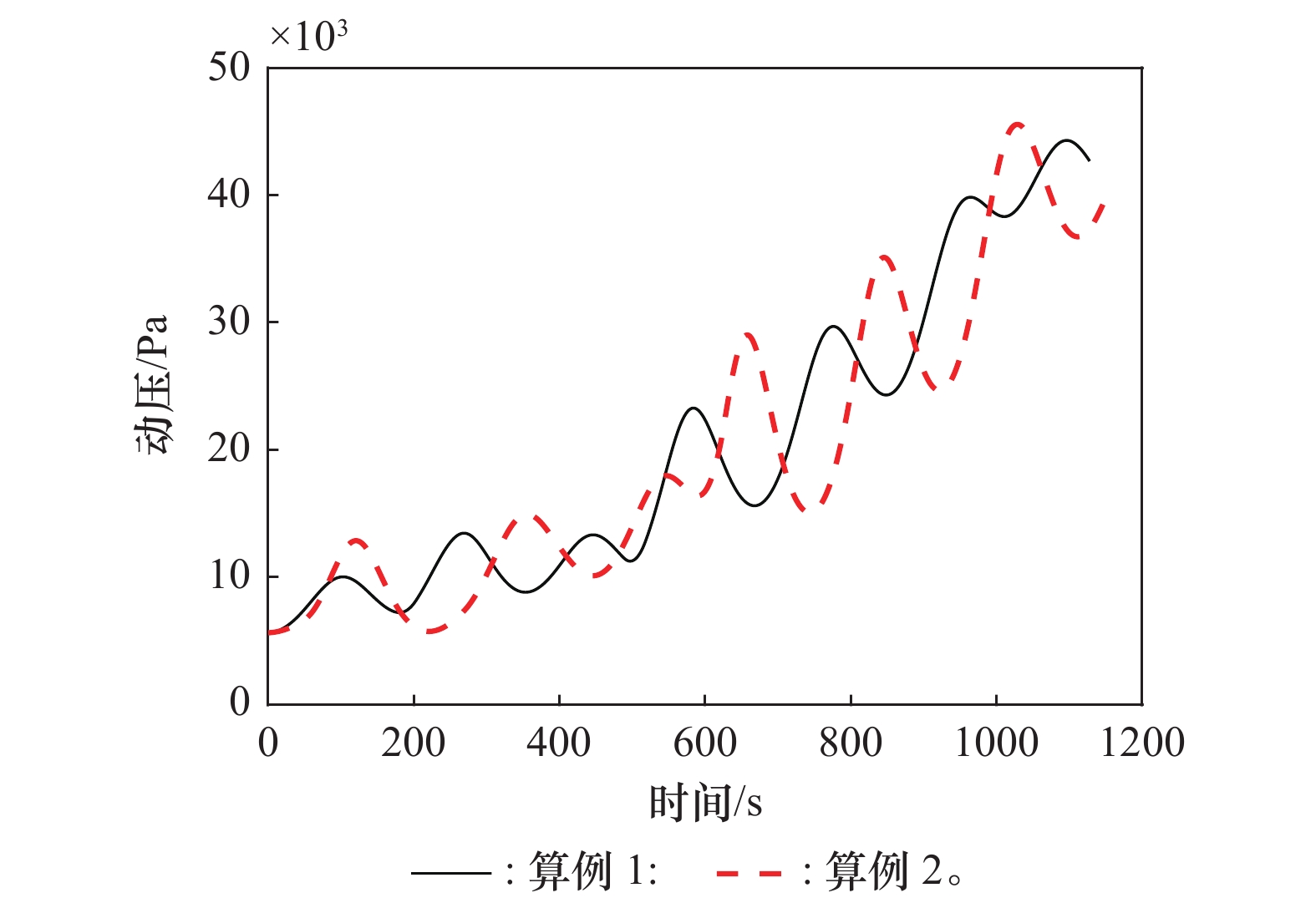
图17
热流密度变化曲线"
图18
过载变化曲线"
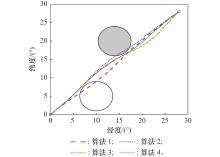
图19
不同算法二维制导轨迹图"
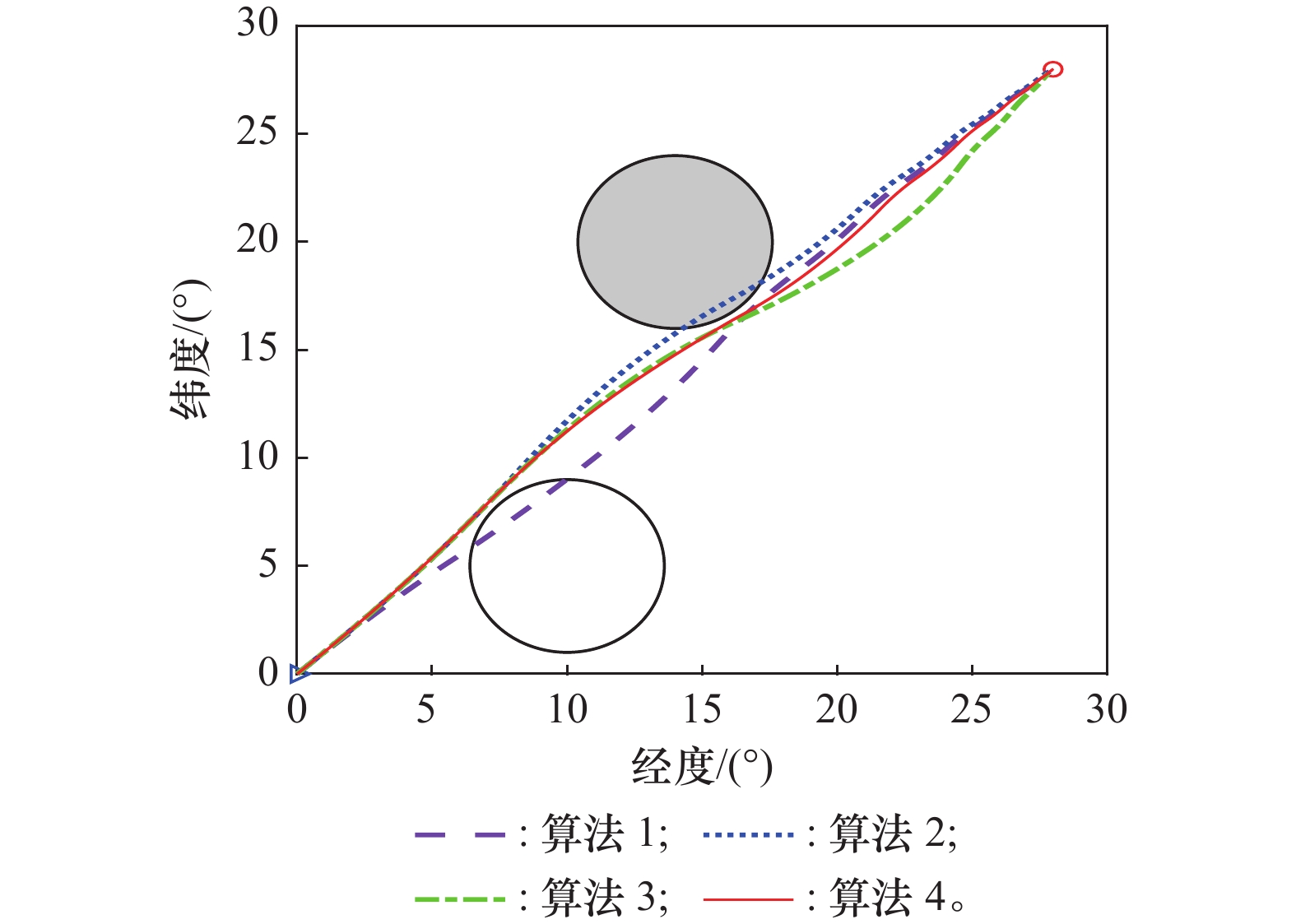
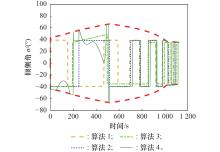
图20
不同算法倾侧角变化曲线"
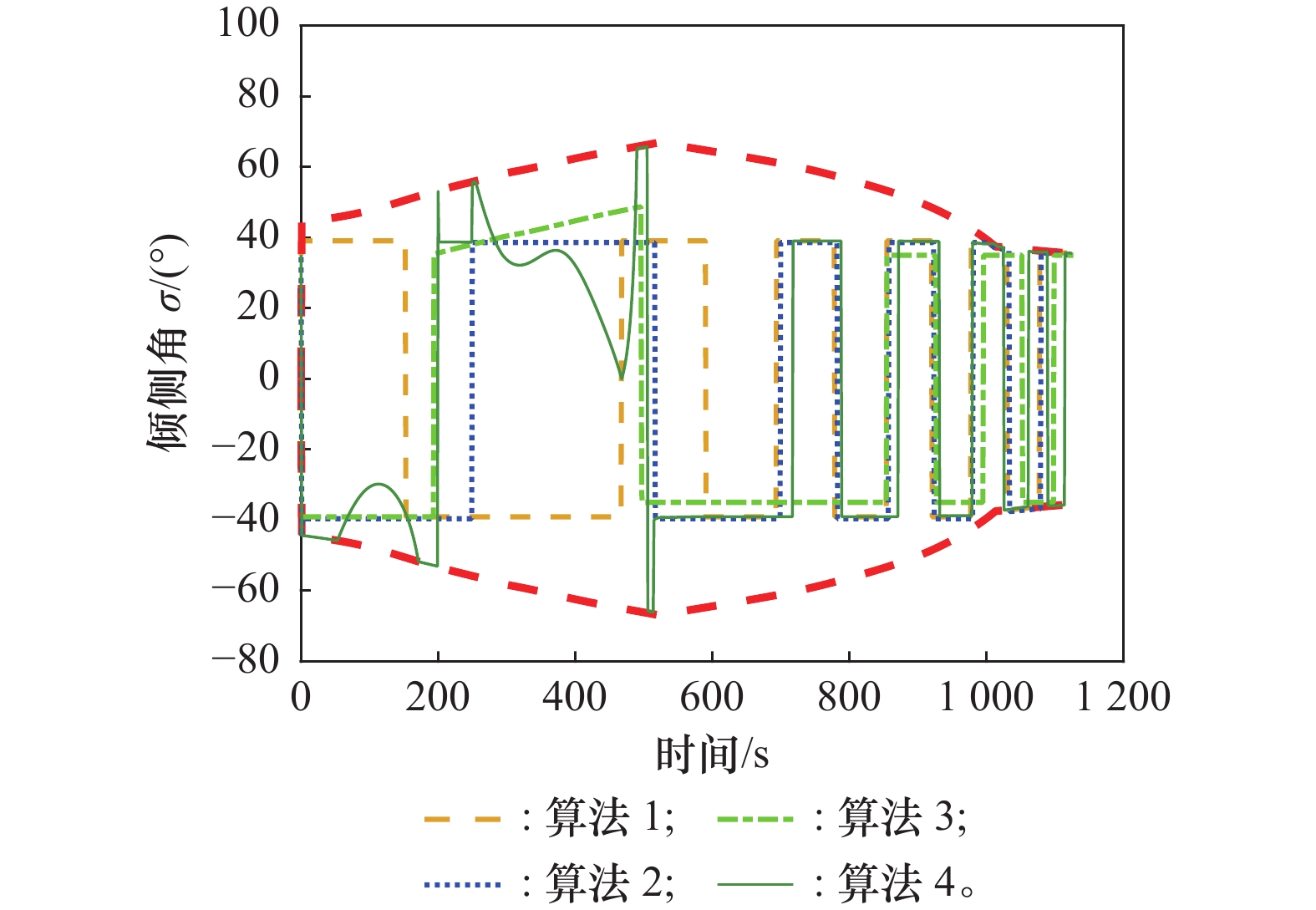
表4
不同算法对比评价指标"
| 算法 | 是否规避禁飞区Ⅰ | 是否规避禁飞区Ⅱ | 制导误差/km |
| 算法1 | 否 | 是 | 18.98 |
| 算法2 | 是 | 否 | 12.97 |
| 算法3 | 是 | 是 | 30.91 |
| 算法4 | 是 | 是 | 0.62 |
图21
蒙特卡罗仿真二维制导轨迹图"
图22
蒙特卡罗仿真高度变化曲线"
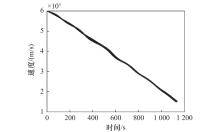
图23
蒙特卡罗仿真速度变化曲线"
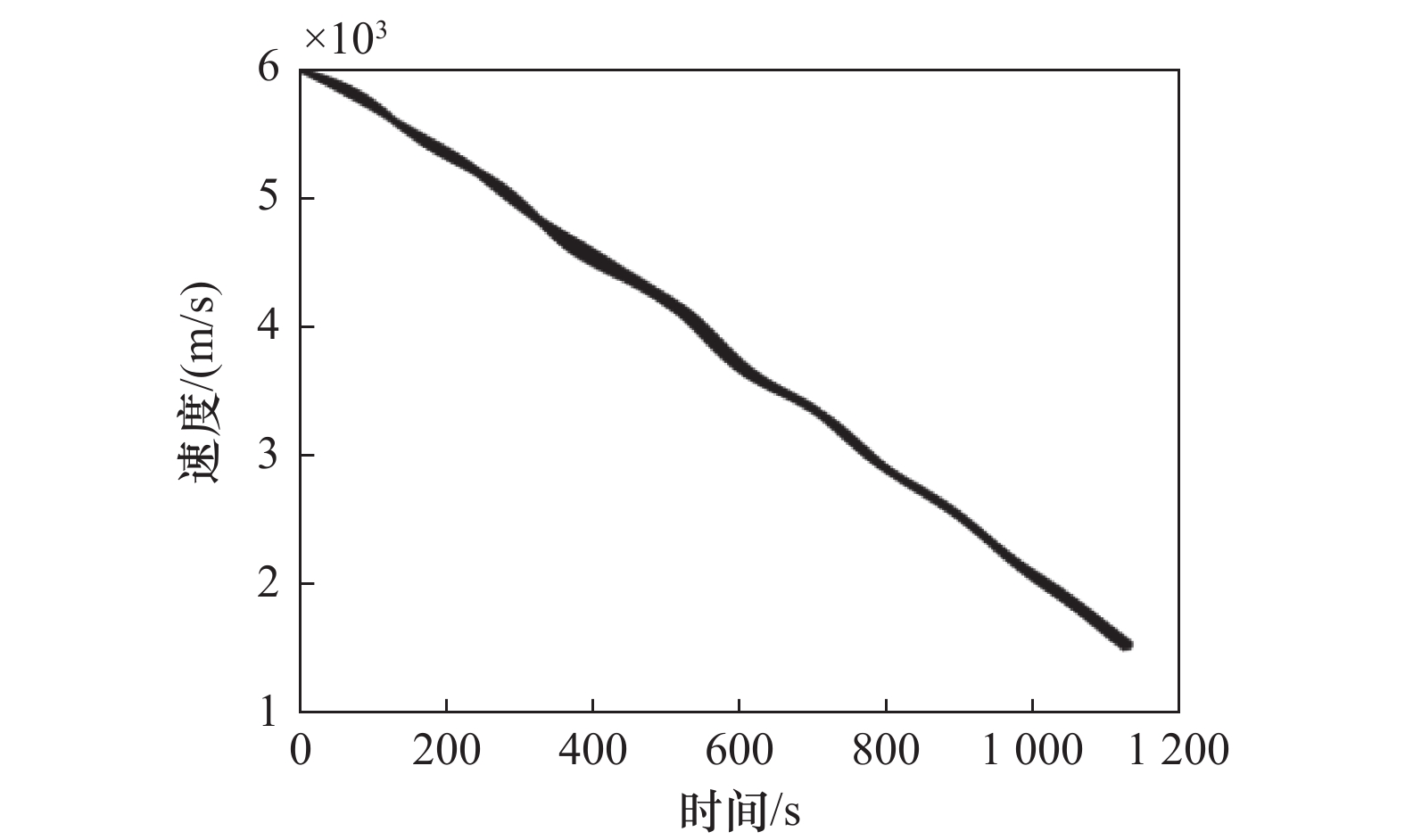
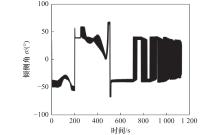
图24
蒙特卡罗仿真倾侧角变化曲线"
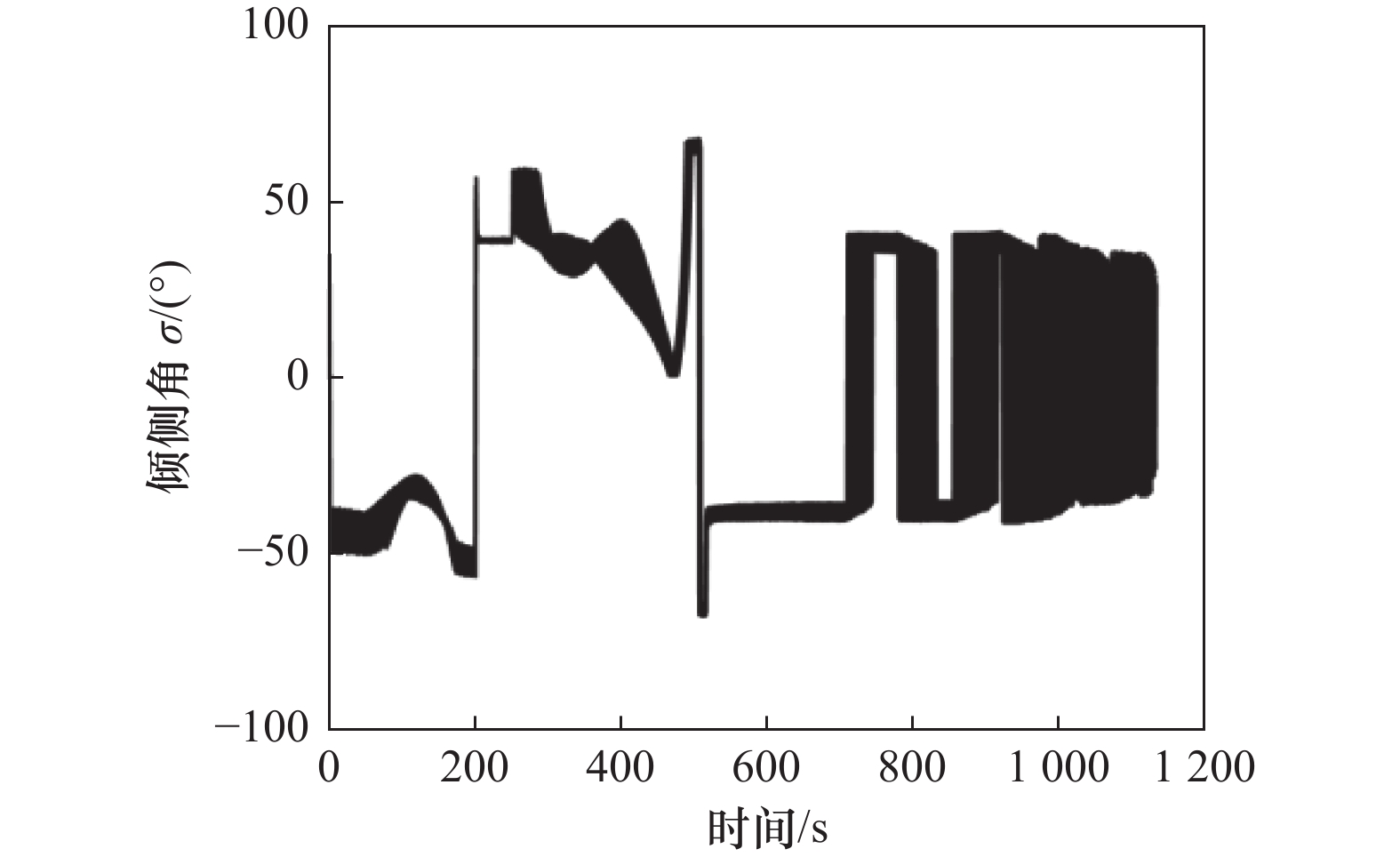
图25
飞行器终端落点散布图"
| 1 |
陈军燕, 袁秋月, 廖龙文. 2023年国外高超声速领域发展综述[J]. 航天电子对抗, 2024, 40 (2): 59- 64.
doi: 10.3969/j.issn.1673-2421.2024.02.014 |
|
CHEN J Y, YUAN Q Y. Review of hypersonic technology development abroad in 2023[J]. Tactical Missile Technology, 2024, 40 (2): 59- 64.
doi: 10.3969/j.issn.1673-2421.2024.02.014 |
|
| 2 |
ZHANG K, XIONG J J, FU T T. Coupled dynamic model of state estimation for hypersonic glide vehicle[J]. Journal of Systems Engineering and Electronics, 2018, 29 (6): 1284- 1292.
doi: 10.21629/JSEE.2018.06.15 |
| 3 | SAYLER H M. Hypersonic weapons: background and issues[R]. U. S. : The Congressional Research Service, 2019. |
| 4 |
LIU S X, YAN B, HUANG W, et al. Current status and prospects of terminal guidance laws for intercepting hypersonic vehicles in near space: a review[J]. Journal of Zhejiang University-SCIENCE A, 2023, 24 (5): 387- 403.
doi: 10.1631/jzus.A2200423 |
| 5 | SHEN Z J, LU P. Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance, Control, and Dynamics, 2003, 26 (1): 111- 121. |
| 6 |
LIANG Z X, LONG J T, ZHU S Y, et al. Entry guidance with terminal approach angle constraint[J]. Aerospace Science and Technology, 2020, 102, 105876.
doi: 10.1016/j.ast.2020.105876 |
| 7 |
ZHANG Y, ZHANG R, LI H F. Graph-based path decision modeling for hypersonic vehicles with no-fly zone constraints[J]. Aerospace Science and Technology, 2021, 116, 106857.
doi: 10.1016/j.ast.2021.106857 |
| 8 |
LUO C X, ZHOU C J, BU X W. Multi-missile phased cooperative interception strategy for high-speed and highly maneuverable targets[J]. Aerospace and Electronic Systems, 2025, 61 (2): 1971- 1996.
doi: 10.1109/TAES.2024.3463633 |
| 9 |
HE L, YAN X D, TANG S. Spiral-diving trajectory optimization for hypersonic vehicles by second-order cone programming[J]. Aerospace Science and Technology, 2019, 95, 105427.
doi: 10.1016/j.ast.2019.105427 |
| 10 |
SHAHZAD S K, HU W D. Hypersonic reentry trajectory planning by using hybrid fractional-order particle swarm optimization and gravitational search algorithm[J]. Chinese Journal of Aeronautics, 2021, 34 (1): 50- 67.
doi: 10.1016/j.cja.2020.09.039 |
| 11 |
XU H, CAI G B, MU C X, et al. Analytical reentry guidance framework based on swarm intelligence optimization and altitude-energy profile[J]. Chinese Journal of Aeronautics, 2023, 36 (12): 336- 348.
doi: 10.1016/j.cja.2023.07.029 |
| 12 |
LIANG Z, ZHU S. Constrained predictor-corrector guidance via bank saturation avoidance for low L/D entry vehicles[J]. Aerospace Science and Technology, 2021, 109, 106448.
doi: 10.1016/j.ast.2020.106448 |
| 13 |
LIU Z Z, ZHENG G D, ZHANG B, et al. Predictor-corrector reentry guidance for hypersonic glide vehicles based on high-precision analytical solutions[J]. Aerospace Science and Technology, 2024, 155, 109545.
doi: 10.1016/j.ast.2024.109545 |
| 14 | TAO C H, KUN Z, GUIRAO J L G, et al. Analytical predictor-corrector entry guidance for hypersonic gliding vehicles[J]. International Journal of Nonlinear Sciences and Numerical Simulation, 2021, 22 (7/8): 955- 971. |
| 15 |
TAO W, ZHANG H B, TANG G J. Predictor-corrector entry guidance with waypoint and no-fly zone constraints[J]. Acta Astronautica, 2017, 138, 10- 18.
doi: 10.1016/j.actaastro.2017.05.009 |
| 16 |
雍恩米, 唐国金, 陈磊. 高超声速无动力远程滑翔飞行器多约束条件下的轨迹快速生成[J]. 宇航学报, 2008, 29 (1): 46- 52.
doi: 10.3873/j.issn.1000-1328.2008.01.008 |
|
YONG E M, TANG G J, CHEN L. Rapid trajectory planning for hypersonic unpowered long-range reentry vehicles with multi-constraints[J]. Journal of Astronautics, 2008, 29 (1): 46- 52.
doi: 10.3873/j.issn.1000-1328.2008.01.008 |
|
| 17 | 王青, 冉茂鹏, 赵洋. 基于预测校正法的高超声速飞行器再入制导[J]. 北京航空航天大学学报, 2013, 39 (12): 1563- 1567. |
| WANG Q, RAN M P, ZHAO Y. Reentry guidance for hypersonic vehicle based on predictor-corrector method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39 (12): 1563- 1567. | |
| 18 | 贺杨超, 李炯, 邵雷, 等. 基于自适应横程走廊的再入滑翔飞行器改进预测校正算法[J]. 系统工程与电子技术, 2024, 46 (2): 692- 702. |
| HE Y C, LI J, SHAO L, et al. Improved predictor-corrector algorithm of reentry gliding vehicle based on adaptive cross-range corridor[J]. Systems Engineering and Electronics, 2024, 46 (2): 692- 702. | |
| 19 |
ZHANG D, LIU L, WANG Y J. On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117, 243- 253.
doi: 10.1016/j.actaastro.2015.08.006 |
| 20 | 卓琳人. 滑翔式再入飞行器轨迹优化与制导方法研究[D]. 武汉: 华中科技大学, 2019. |
| ZHUO L R. Study on trajectory optimization and guidance approach for hypersonic glide-reentry vehicle[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| 21 |
YONG E M, QIAN W Q, HE K F. An adaptive predictor-corrector reentry guidance based on self-definition way-points[J]. Aerospace Science and Technology, 2014, 39, 211- 221.
doi: 10.1016/j.ast.2014.08.004 |
| 22 |
LI Z H, YANG X J, SUN X D, et al. Improved artificial potential field based lateral entry guidance for waypoints passage and no-fly zones avoidance[J]. Aerospace Science and Technology, 2019, 86, 119- 131.
doi: 10.1016/j.ast.2019.01.015 |
| 23 | LIANG Z X, REN Z. Tentacle-based guidance for entry flight with no-fly zone constraint[J]. Journal of Guidance, Control, and Dynamics, 2017, 41 (4): 996- 1005. |
| 24 |
LI X, WANG X G, ZHOU H Y. Entry guidance for spatial no-fly zones avoidance via model-based reinforcement learning[J]. Aerospace Science and Technology, 2024, 153, 109405.
doi: 10.1016/j.ast.2024.109405 |
| 25 |
YAO D D, XIA Q L. Predictor-corrector guidance for a hypersonic morphing vehicle[J]. Aerospace, 2023, 10 (9): 795.
doi: 10.3390/aerospace10090795 |
| 26 | 惠俊鹏, 汪韧, 郭继峰. 基于强化学习的禁飞区绕飞智能制导技术[J]. 航空学报, 2023, 44 (11): 327416. |
| HUI J P, WANG R, GUO J F. Intelligent guidance for no-fly zone avoidance based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (11): 327416. | |
| 27 |
LIANG Z X, LIU S Y, LI Q D, et al. Lateral entry guidance with no-fly zone constraint[J]. Aerospace Science and Technology, 2017, 60, 39- 47.
doi: 10.1016/j.ast.2016.10.025 |
| 28 |
王青, 莫华东, 吴振东, 等. 考虑禁飞圆的高超声速飞行器再入预测制导[J]. 哈尔滨工业大学学报, 2015, 47 (2): 104- 109.
doi: 10.11918/j.issn.0367-6234.2015.02.019 |
|
WANG Q, MO H D, WU Z D, et al. Predictive reentry guidance for hypersonic vehicles considering no-fly zone[J]. Journal of Harbin Institute of Technology, 2015, 47 (2): 104- 109.
doi: 10.11918/j.issn.0367-6234.2015.02.019 |
|
| 29 |
章吉力, 刘凯, 樊雅卓, 等. 考虑禁飞区规避的空天飞行器分段预测校正再入制导方法[J]. 宇航学报, 2021, 42 (1): 122- 131.
doi: 10.3873/j.issn.1000-1328.2021.01.013 |
|
ZHANG J L, LIU K, FAN Y Z, et al. A piecewise predictor-corrector re-entry guidance algorithm with no-fly zone avoidance[J]. Journal of Astronautics, 2021, 42 (1): 122- 131.
doi: 10.3873/j.issn.1000-1328.2021.01.013 |
|
| 30 | XIE Y, LIU L H, TANG G J, et al. A reentry trajectory planning approach satisfying waypoint and no-fly zone constraints[C]//Proc. of the 5th International Conference on Recent Advances in Space Technologies, 2011: 241−246. |
| 31 | 雷刚, 罗炜, 李云舒, 等. 高超声速滑翔飞行器多禁飞区再入机动航迹优化[J]. 航空学报, 2023, 44 (15): 379- 394. |
| LEI G, LUO W, LI Y S, et al. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (15): 379- 394. | |
| 32 | VINH N X, BUSEMANN A, CULP R D. Hypersonic and planetary entry flight mechanics[M]. Ann Arbor: University of Michigan Press, 1980. |
| 33 |
徐慧, 蔡光斌, 张胜修. 高超声速滑翔飞行器再入气动系数改进拟合模型[J]. 宇航学报, 2021, 42 (9): 1139- 1149.
doi: 10.3873/j.issn.1000-1328.2021.09.009 |
|
XU H, CAI G B, ZHANG S X. Modified aerodynamic coefficient fitting models of hypersonic gliding vehicle in reentry phase[J]. Journal of Astronautics, 2021, 42 (9): 1139- 1149.
doi: 10.3873/j.issn.1000-1328.2021.09.009 |
|
| 34 | PHILLIPS T H. A common aero vehicle(CAV) model, description, and employment guide[R]. Arlington: Schafer Corporation for Air Force Research Laboratory and Air Force Space Command, 2003. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||