

0 引言
合成孔径雷达(synthetic aperture radar, SAR)能够实现全天时全天候的二维高分辨成像, 在军事领域和民用领域都具有广泛的应用[1-2]。根据搭载SAR传感器的平台不同, 可分为机载SAR、弹载SAR和星载SAR等多种类型。与机载SAR和星载SAR相比, 弹载SAR的优势为不易受攻击、轨迹设计灵活、合成孔径时间短等。根据SAR收发平台的位置关系, 可分为单基SAR和双基SAR。与单基SAR相比, 双基SAR不仅具有前视二维高分辨成像的能力, 还具备隐身和低截获特点。弹载双基SAR构型集合了弹载SAR和双基构型的优势, 为导弹末制导阶段的全程二维高分辨实时成像提供了解决方案。
二维分辨率是双基构型设计中重要的技术指标。双基地平台空间构型灵活, 可以通过合理设计收发平台的位置和运动方向来优化目标区域的二维分辨力。在末制导阶段, 由于接收平台距离目标越来越近, 不易进行大方向机动, 所以对发射平台的参数设计尤为重要, 其设计是否合理, 不仅影响最终SAR图像的质量, 还制约着目标识别和制导的精度。
针对单基平台SAR, 文献[3-7]分别提出了序列二次优化、遗传算法等方法对弹道轨迹和时序设计进行优化。针对双基平台SAR, 目前研究比较多的是机载双基系统、星载双基系统以及星机双基系统, 文献[8-13]根据不同构型的平台特性提出了相应的轨迹优化设计方法和数据处理方法。机载/星载双基平台的飞行轨迹都较为平稳, 构型设计时只需考虑满足图像要求的指标即可。对于弹载双基平台, 由于其机动性强, 存在较大的三维加速度, 成像时间越短, 由加速度引起的轨迹弯曲越小, 越有利于成像算法的处理。由于需要考虑成像时间对成像质量和制导精度的影响, 所以传统的机载/星载双基系统构型设计方法不适用于弹载双基前视SAR(missile-borne bistatic forward-looking SAR, MBFL-SAR)。关于MBFL-SAR构型的研究目前还比较少。文献[14]研究了基于线性衰减模型的MBFL-SAR构型轨迹设计方法, 但忽略了构型设计对方位分辨率的影响。所以需要针对MBFL-SAR研究新的构型设计方法。
本文从MBFL-SAR的实际应用角度出发, 考虑如何通过构型设计达到在最短的成像时间内满足系统分辨率指标的目的。基于此, 提出一种参数降维的构型设计方法。首先, 从MBFL-SAR成像几何模型入手, 基于梯度理论分析二维分辨率以及分辨率夹角的计算方法; 然后, 经过梳理发现双基角的地面投影角和收发平台速度矢量地面投影角对分辨率指标和成像时间影响较大, 通过推导二者间的关系, 提出一种参数降维的构型优化设计方法, 在满足系统指标的前提下, 提高构型设计效率, 降低成像时间, 保证成像质量和制导精度; 最后, 通过点目标仿真验证所提方法的有效性, 为后续弹道优化设计的工程应用奠定基础。
1 MBFL-SAR几何模型
1.1 双基SAR工作几何
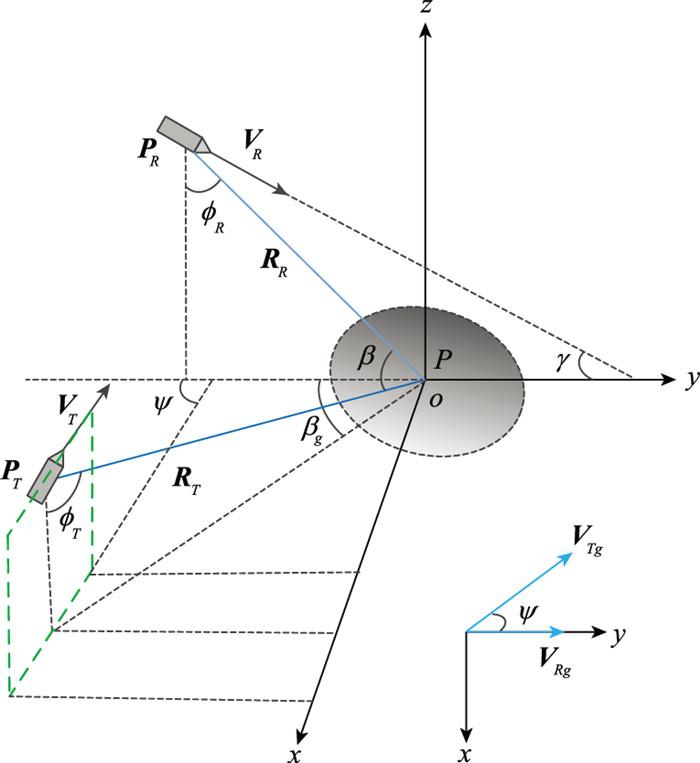
在末制导过程中, 我们希望通过MBFL-SAR构型的设计, 使得达到一定目标分辨率的成像时间最短, 这对目标的成像质量和提高目标的打击精度至关重要。图 1给出了MBFL-SAR的几何模型。为简化分析, 认为在成像时间内, 收发平台不存在水平方向的偏移量。接收平台只在yoz平面内运动, 即使不在该平面内, 也可以通过简单的坐标旋转和平移满足假设条件。发射平台水平飞行, 在与yoz平面夹角为ψ的平面内运动。目标P位于坐标系xyz的原点o。在t时刻, 发射机和接收机的位置矢量分别为PT和PR, 速度矢量分别为VT和VR, 到点目标P的斜距矢量分别为RT和RR, 入射角分别为
图1
1.2 地面距离向分辨率
利用文献[15]的梯度理论, 可以得到点目标P的地面距离向分辨率为
式中: c为光速;
式中: ix和iy分别为x和y方向的单位矢量。由式(2)可以看出, 在B、
1.3 地面方位向分辨率
同理, 利用文献[15]的梯度理论, 可以得到点目标P的地面方位向分辨率为
式中: Ta为成像时间(即雷达波束驻留时间);
式中: iPT和iPR分别为发射和接收平台视线方向的单位矢量; G =[1 1 0]为地面投影矢量。
1.4 地面二维分辨率夹角
地面二维分辨率夹角可以表示为
双基构型系统的地面二维分辨率方向的夹角一般很难一直保持正交, 当其夹角过小或过大时, 均无法形成二维高分辨图像。为了更好地约束双基构型二维分辨率指标, 文献[15]提出分辨单元面积的概念, 可表示为
由式(6)可以看出, 当二维分辨率夹角为90°时, 二维分辨单元面积最小, 对应的SAR图像的效果最优。
1.5 构型参数简化
利用弹载双基构型进行末制导前视成像时, 采用远端发射近端接收的模式, 发射弹处于滑翔飞行段, 接收弹处于俯冲攻击段(为了简化分析, 这里不考虑载荷和同步问题)。由于接收弹距离目标较近且要保持对目标的前视稳定跟踪, 无法进行大方向机动, 只能通过合理设计发射弹的位置和速度方向来实现最优的SAR图像质量。在实际应用中, 发射平台的高度、速度大小以及与场景中心目标的距离通常根据实际作战情况决定, 可以认为是已知量。因此, MBFL-SAR构型参数设计最终可以简化为对双基角的地面投影角βg和收发平台速度矢量地面投影角的优化设计。
2 构型设计方法
实际作战应用过程中, 总是希望在最短的成像时间内达到系统指标要求的分辨率。在该约束下, 通过建立βg和的几何关系, 实现MBFL-SAR构型设计参数的降维处理。接下来, 在成像时间最小的条件下, 我们对βg和ψ的关系进行推导。
发射平台的地面多普勒分量可表示为
式(7)中,
接收平台的地面多普勒分量可表示为
令
可将
式中: 上标T表示转置操作。
当βg一定时,
式中,
式中,
令
式中: n为整数。
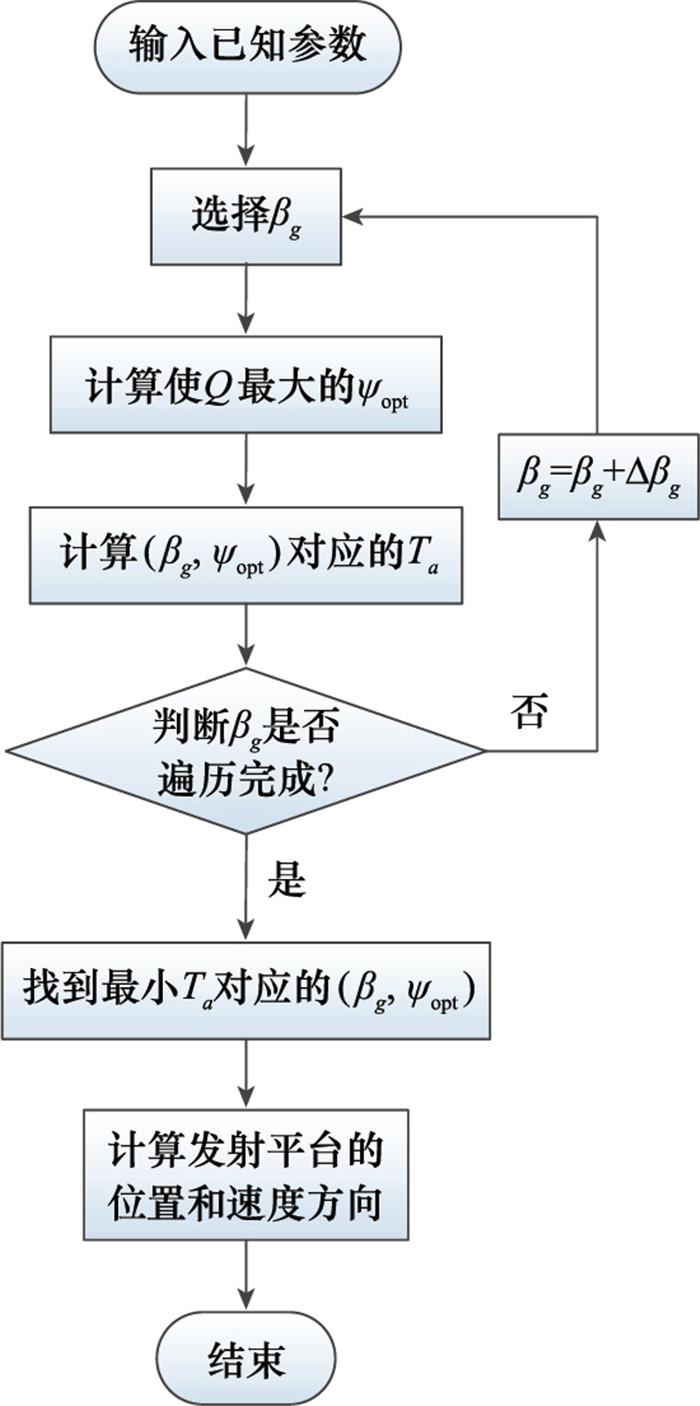
由上述分析可知, 当βg一定时, 根据式(16)可计算得到使Q最大的ψopt值。通过比较所有满足系统分辨率指标的(βg, ψopt)所对应的成像时间, 可确定最终的发射平台的位置和速度方向。构型设计流程图如图 2所示, 图中Δβg表示遍历βg时设定的角度间隔。
图2
3 仿真实例分析
表1 仿真实验参数
Table 1
| 参数 | 数值 | 参数 | 数值 | |
| B/MHz | 100 | VR/(m/s) | [0 800-200] | |
| fc/ GHz | 16 | PR/km | [0-9 8] | |
| S/m2 | 10 | |RR|/km | 12 | |
| 48.37 | |RT|/km | 50 | ||
| 36.87 | |VT|/(m/s) | 1 500 |
图3
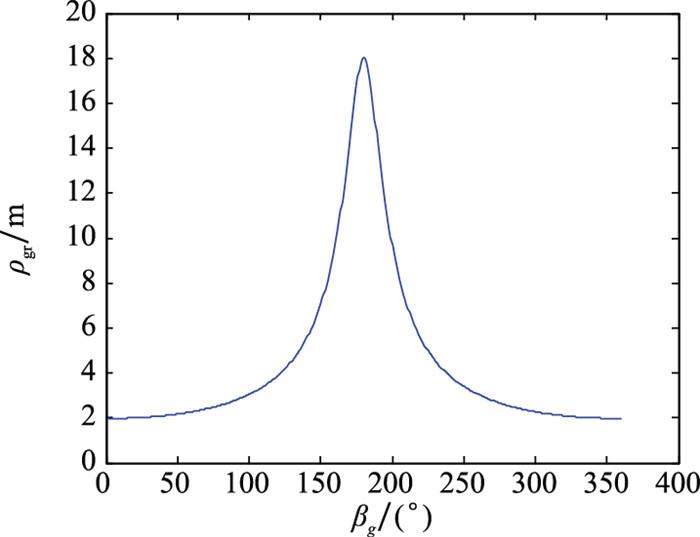
图4
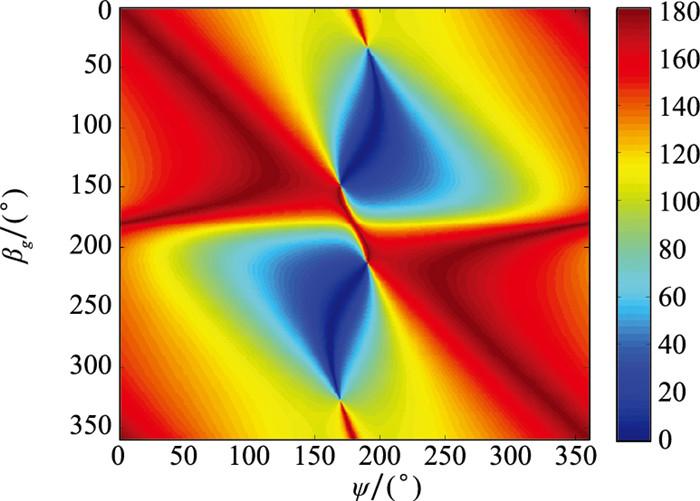
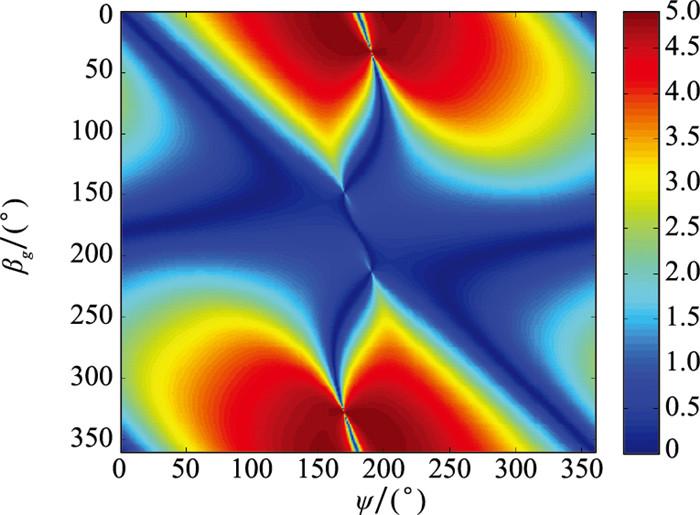
图4
二维分辨率矢量夹角随βg和ψ的变化关系
Fig.4
Two-dimensional resolution vector angle at different βg and ψ
图5
为了保证系统的二维分辨能力, 对系统的二维分辨率及分辨率夹角进行如下约束: ①二维分辨率大小应满足:
图6
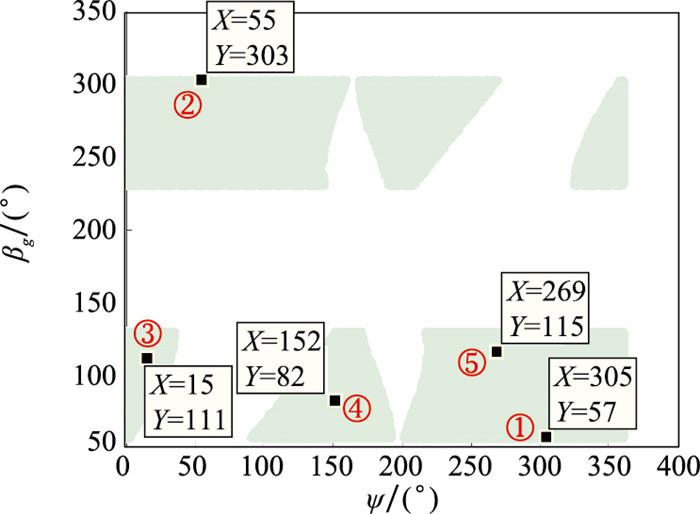
与传统设计方法相比, 本文所提的构型参数降维设计方法具有以下两个优点: ①可根据实际作战情况实时调整发射平台飞行速度方向, 使得达到系统指标要求的成像时间最短, 降低后续成像处理的难度; ②大幅提升了参数设计的效率。在同一处理平台下, 利用传统方法将βg和ψ间隔1°进行遍历寻优得到目标结果需用时7.469 s, 利用本文所提方法用时0.035 s。
图7
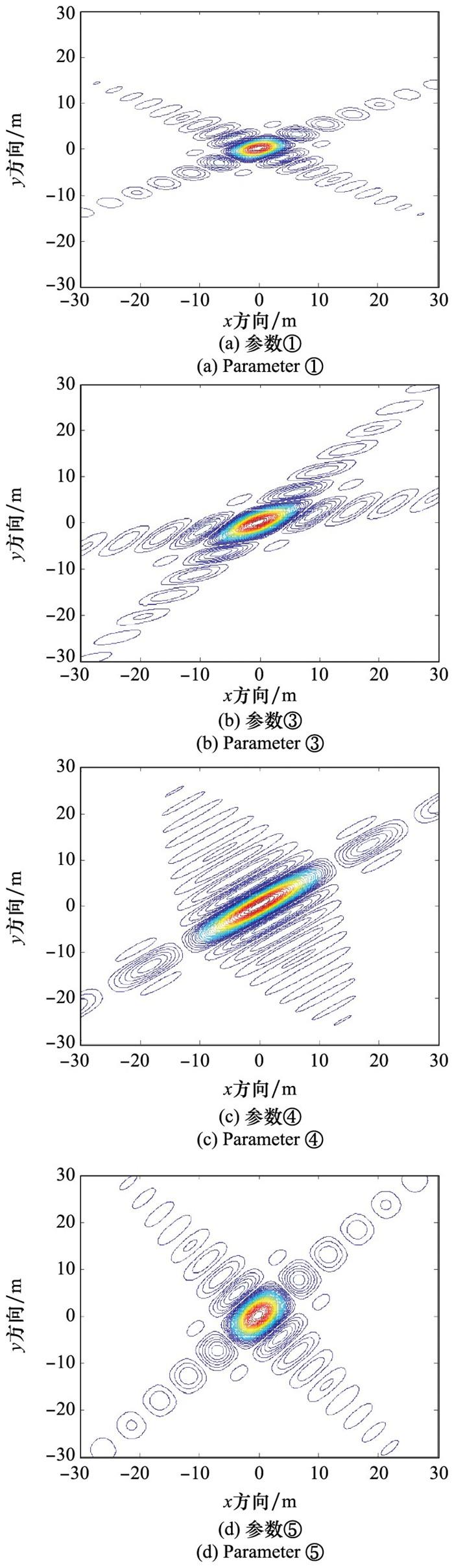
表2 性能指标的满足情况
Table 2
| 序号指标 | 要求值 | 本文方法① | 传统方法 | ||
| ③ | ④ | ⑤ | |||
| ρgr/m | - | 2.24 | 3.44 | 2.60 | 3.62 |
| ρga/m | - | 3.55 | 3.27 | 13.75 | 6.26 |
| Ω/(°) | - | 127.28 | 143.62 | 95.95 | 80.06 |
| S/m2 | 10 | 9.99 | 18.96 | 35.94 | 23.01 |
4 结论
利用MBFL-SAR成像体制, 有效解决了弹载平台SAR全程二维高分辨成像的问题, 有效提升了末制导阶段的目标识别能力和精确打击能力。基于MBFL-SAR平台, 本文提出参数降维的发射平台构型设计方法, 在成像时间的约束下, 可快速计算得到满足系统指标的发射平台构型参数, 为较长成像时间造成的成像质量下降的问题提供了解决方案。仿真结果验证了所提方法的合理性, 为弹载SAR平台的目标识别和精确制导奠定了基础。
参考文献
Optimal trajectory regulation for radar imaging guidance
[J].
弹载SAR系统参数优化设计方法
[J].
Parameter optimization design method of missile-borne SAR
[J].
弹载下降段大前斜聚束SAR成像时序设计
[J].
Sequential design for highly squinted missile-borne spotlight SAR imaging on descent trajectory
[J].
Analysis and focusing of bistatic airborne SAR data
[J].DOI:10.1109/TGRS.2007.900689 [本文引用: 1]
Inclined geosynchronous spaceborne-airborne bistatic SAR: performance analysis and mission design
[J].
Focusing bistatic SAR data in airborne/stationary configuration
[J].DOI:10.1109/TGRS.2009.2027700 [本文引用: 1]
弹载双基前视SAR俯冲段弹道设计方法
[J].
Design method of MBFL-SAR trajectory during terminal diving period
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}