

0 引言
近年来, 美军启动推进了多项无人机集群作战项目并取得了阶段性成果, 未来无人机集群将逐步实现半自主与完全自主的作战能力[1-4], 我国面临的无人机集群威胁与日俱增。对此, 许多单位与学者开展了反制无人机集群的研究, 提出了电磁干扰、电子压制、电子欺骗等干扰手段, 破坏集群通信网络以瘫痪集群作战能力; 采用高功率微波、激光武器等定向能毁伤手段, 毁伤无人机关键部件; 采用枪、炮、破片炸弹等硬杀伤手段, 对集群进行直接摧毁[5-8], 但单一反制手段往往受到各种使用条件的制约, 单独使用的效果难以得到保证。文献[9]设计了一种软硬结合、梯次部署的防御系统, 综合运用多种手段实现对无人机集群的有效反制。但目前针对无人机的探测、干扰与杀伤武器的有效作用距离范围多为5~30 km[10], 以上反制武器与防御系统仅适用于中近程防御。无人机集群对抗多被认为是一种反制无人机集群最有效的硬杀伤手段, 文献[11]与文献[12]分别针对无人机集群对抗中决策生成与编队、制导问题进行了研究, 为无人机集群对抗提供了技术方案。文献[13]设计了一种由拦截群、侦察群、反辐射群、诱饵群、电子对抗群、补充群组成的无人机蜂群拦截系统。多种职能的群相互配合, 具备较强的集群对抗能力且能拦截多种目标, 但其依赖于协同探测、协同控制、群智能等先进技术, 系统功能实现难度大。文献[14]研究了一种多弹协同毁伤无人机集群的方法, 根据目标分布区域与拦截弹爆炸毁伤半径计算各拦截弹的目标点, 拦截弹通过协同方式同时到达目标点, 实现对无人机集群的覆盖毁伤。理论上, 该方法面对密集分布的蜂群式无人机有较好的拦截效果, 但当集群由数目较少的中/大型集群无人机组成且分布较为分散时, 难以实现有效覆盖。另一种有效的反制手段是用传统武器系统拦截载机, 从根本上毁伤集群。目前对于无人机集群反制方法的研究尚存在以下两方面不足, 一是反制对象多为微/小型无人机组成的蜂群, 而针对“小精灵”一类具有较大飞行高度与作战里程的中/大型集群无人机的反制方法研究较少; 二是对于无人机集群在载机释放后的中远程编队巡航阶段的反制方法研究较少。
比例导引(proportional navigation, PN)律仍是目前空天拦截武器应用最广泛的制导律, PN经过发展主要分为纯PN(pure PN, PPN)及其变形[15-17]与真PN(true PN, TPN)及其变形[18-23]两大类。学者们在对PN的拦截能力进行分析时提出了捕获区的概念, 求解捕获区的方法不同, 得到的捕获区描述方式也不同。文献[24]对PPN、TPN两大类PN律进行了分析与求解, 并提出了捕获区的最一般描述形式, 即用初始弹目接近速度与初始脱靶量描述导弹对目标的捕获能力。文献[25]用此种描述方法给出了视线旋转坐标系下三维现实TPN的捕获区。文献[26]充分考虑目标机动与加速度约束, 给出了不同机动情形下的捕获区。文献[27-28]用相平面法计算并描述了目标在不同机动情况下的捕获区。文献[29-30]分析了基于PN拦截高速目标的零控拦截条件, 给出了用弹目速度前置角描述的捕获区, 用角度的形式描述可直观地反映出弹目初始空间几何关系与拦截能力的关系, 能较好地适用于本文中子拦截弹可拦截性约束分析, 但其提出的捕获区仅在弹目速度比小于1的条件下适用。对此, 本文采用文献[29-30]的描述方式, 推导了拦截低速目标(弹目速度比大于1)时的捕获区, 进一步得到了计算“释放点”时的可拦截性约束条件。
针对中远程阶段反制无人机集群方法理论欠缺的问题, 本文提出一种利用子母导弹拦截无人机集群的作战构想。针对该构想中的制导问题, 给出了集群威胁“重心”与子拦截弹“释放点”的选取方法, 为子母导弹的制导提供了一种可行方案。
1 子母导弹拦截无人机集群作战构想
图1
在载机释放后的中远程的密集飞行阶段, 无人机集群首先进行集结与编队, 此阶段集群的通信、协同等功能尚不完全, 是防护能力最弱的阶段; 随后, 无人机集群按照规划的路线以较密集的编队巡航飞往任务区域, 此阶段编队密集, 且由于单个无人机性能以及编队结构的约束, 集群整体的机动能力较弱。
基于集群的以上特性, 提出一种利用子母导弹在中远程密集飞行阶段拦截无人机集群的作战构想。
所设计子母导弹由母舱与运载在舱内的子拦截弹构成, 如图 2所示。母舱搭载涡喷发动机, 可获得远大于无人机的飞行速度; 采用复合式导引头, 在飞至距离集群目标一定距离后可对集群目标进行识别与截获, 并在适当的位置以弹射的方式释放子拦截弹, 对无人机目标进行拦截。子拦截弹携带光学与红外导引头, 通过智能识别算法识别并锁定目标, 尾部装有电动舵系统, 依靠母舱提供的较大初速度制导拦截目标。
图2
子母导弹拦截无人机集群的基本作战过程为: 分散布置的综合情报系统对集群目标进行识别与跟踪, 并将目标信息指示给子母导弹指控系统; 指控系统制导母舱飞向目标; 母舱在适当的位置释放子拦截弹对目标进行拦截, 作战构想如图 3所示。
图3

图3
子母导弹拦截无人机集群作战构想
Fig.3
Operational conception of mother-son missile intercepting unmanned aerial vehicle cluster
从该构想中可以看出, 只有确定了子拦截弹“释放点”的位置, 整个拦截过程才能连通, 因此如何求取“释放点”是该制导策略的关键。在制导问题中, 可将无人机集群目标看作是空间中的多个质点, 由多个质点直接推导“释放点”较为困难。对此提出一种计算集群威胁“重心”的思想, 用威胁“重心”的位置与运动状态代表整个集群的位置与状态, 据此可将母舱制导的“一对多”问题转化为“一对一”问题。
本文的制导策略即如何合理地选择集群的威胁“重心”, 并根据威胁“重心”、目标状态与子母导弹的性能参数计算母舱的最佳“释放点”。
注 1 当集群目标较多时, 可将集群分成n块, 计算出与之对应的n个威胁“重心”与“释放点”, 由n枚弹分别进行拦截。此时, 需要为n枚子母弹额外设置以相同速度同时释放的约束条件, 以保证子拦截弹同时拦截, 避免先后拦截情况下前者拦截过程对后者的拦截产生干扰的问题。为突出重点, 本文不再展开讨论集群分群与母舱协同问题。
2 集群威胁“重心”选取
为使子母导弹制导更易实现, 期望将母舱“一对多”的制导问题转化为“一对一”制导问题。对此, 希望能够在集群中寻找一个虚拟质点, 用质点的位置代表集群的位置。
由微型无人机组成的蜂群, 无人机数目可达成百上千架, 在由中型无人机组成的集群中, 无人机的数目也很可能多达几十至上百架。在考虑硬杀伤反制手段时, 难以将其全部拦截。另外, 集群往往由异构无人机组成, 其各自发挥的职能与威胁程度也不同, 若能将其中具有高威胁或高价值的无人机拦截, 也能达到削弱或毁伤集群关键作战能力的目的。因此,拦截策略为指控系统根据传感器系统得到的探测结果对目标进行威胁评估, 挑选集群中高威胁目标进行拦截, 而忽略其余次要目标。同时, 挑选出的目标威胁程度也可能会有差异, 此时将目标威胁度形象地看作其重量, 所寻找的质点不应仅代表无人机集群的几何中心, 而是要代表集群威胁度的重心, 如此可保证母舱以该点为目标进行制导时可最有利地对高威胁目标进行拦截, 将集群总威胁度降到最低。
定义 1 无人机集群的威胁“重心”定义为可代表集群威胁分布的空间质点, 威胁“重心”位置随集群运动实时变化。
在惯性坐标系OXYZ下对“重心”进行求取, 规定原点O位于导弹发射阵地, X轴在水平面内, 指向目标在地面投影为正; OZ轴与地面垂直, 向上为正; OY轴由右手定则确定。威胁“重心”计算模型如下:
式中:
该模型下“重心”的求取在数学上是一个多元函数的无条件极值问题, 利用常规求多元函数驻点与Hesse矩阵的方法或粒子群算法等智能优化算法均易求得极值。
为便于后续子拦截弹可拦截性分析, 在得到集群威胁“重心”的基础上需计算集群最大半径。集群最大半径定义为在YOZ投影平面内, 目标与威胁“重心”的最大距离Rmax, Rmax实则对应子拦截弹拦截目标需要做出的最大纵向机动距离, 计算公式如下:
3 子拦截弹“释放点”选取
母舱需在距集群适当的位置释放子拦截弹, “释放点”随目标集群运动而实时变化。对于母舱而言, 可将“释放点”看作目标点进行制导飞行。威胁“重心”可代表集群的位置所在, 利用由威胁“重心”外推“释放点”的方法对“释放点”的位置进行求取。
定义 2 子拦截弹“释放点”定义为母舱释放子拦截弹的空间位置, 该位置是由集群威胁“重心”外推得到的空间中的一个质点, 母舱依据该质点制导飞行并在飞抵该质点后释放子拦截弹, 可最大程度地毁伤集群。
“释放点”的选取需要综合考虑子拦截弹对目标的拦截能力、母舱导引头探测能力以及目标的运动状态, 应满足以下4个约束条件:
(1) 子拦截弹对目标的可拦截性约束。子拦截弹作为一种微型弹, 其对目标的跟踪与机动能力有限, 不具备迎头拦截失败进而转向尾追拦截的能力。因此, 必须对子拦截弹的拦截能力进行分析, 期望子拦截弹释放后有充足的机动时间, 对集群中每个目标均具备拦截条件, 这要求“释放点”距离集群不能过近。
(2) 母舱探测视场角约束。保证目标全部落在母舱导引头视场内, 要求“释放点”距离集群不能过近。
(3) 母舱探测距离约束。复合式导引头实现对目标的有效识别与跟踪需要满足一定距离条件, 要求“释放点”距离集群不能过远。
(4) 为了降低母舱与子拦截弹的制导难度, 要求“释放点”与集群(即集群威胁“重心”)处于同一高度。
其中, 约束条件(2)~(4)可直接计算得到, 约束条件(1)是4个约束条件中的难点, 因此本节重点对子拦截弹对目标的可拦截性进行分析, 进而综合其他3个约束条件得到子拦截弹的最佳“释放点”。
以子拦截弹应用PPN律制导为例, 利用求解子拦截弹捕获区进而反推子拦截弹对目标极限拦截条件的思想求解“释放点”在约束条件(1)下的最近释放位置。
3.1 弹目相对运动模型
以地面惯性坐标系XOZ为参考, 子拦截弹与无人机目标在纵向平面内的相对运动关系如图 4所示。
图4

其中, V和a分别代表速度矢量与加速度矢量; θM、θT分别代表导弹与目标的弹道倾角, q为导弹视线角, 规定θ、q以水平线的正向为基准, 逆时针旋转为正; γ、η分别为导弹与目标的速度前置角, 规定其由速度方向逆时针旋转至弹目视线方向为正。
图 4所示弹目运动数学模型如下:
图5

图6
一方面, 子拦截弹在释放时刻已距集群较近, 且子拦截弹速度远远大于无人机速度; 另一方面, 中小型无人机目标机动能力本身较差, 加之受限于集群编队, 短时间内可做出的机动有限, 为便于后文捕获区分析可忽略目标机动因素。另外, 考虑母舱对集群的探测以及子拦截弹对集群目标拦截的适宜性, 要求母舱飞至“释放点”前需与集群处于同一高度且速度方向对准集群(此处不展开讨论母舱制导问题), 因此子拦截弹初速度应为水平且指向集群方向。基于以上分析做出如下假设。
假设 1 子拦截弹释放后的初始速度水平且指向无人机集群方向, 子拦截弹拦截目标阶段, 目标速度沿水平方向且不发生机动。
3.2 子拦截弹捕获区分析
用导弹速度前置角γ与目标速度前置角η对捕获区进行描述, 下面给出捕获区的定义。
定义 3 捕获区定义为以目标速度前置角η为横轴、导弹速度前置角γ为纵轴构成的坐标平面ηOγ内的一个区域S。目标不发生机动的条件下, 只要导弹与目标的初始状态(γ0, η0) 处于S区域内, 导弹即可在有限时间内成功拦截目标。
制导律的作用是将处于捕获区内的导弹导引至零控拦截状态, 捕获区分析建立在确定了制导律且已知零控拦截条件的基础上, 因此先对零控拦截条件与制导律进行分析。
定义 4 零控拦截条件定义为导弹与目标之间的一种理想相对运动状态, 对处于该状态的导弹不施加任何控制指令即可在有限时间内成功拦截目标。
定理 1 在目标不发生机动的条件下, 在目标与导弹速度比ρ=VT/VM < 1时, 零控拦截条件为γ=arcsin(ρsin η)。
规定目标速度前置角的取值范围为η∈[-π, π]。定理1描述的零控拦截条件如图 7所示(ρ=2/5时), 图中蓝色部分对应顺轨拦截状态, 红色部分对应逆轨拦截状态。
图7
证明 (1) 当η∈[0, π/2]时, 导弹以图 8所示弹目几何关系零控拦截目标。
图8
该条件下导弹速度前置角γ∈[0, π/2], 需满足
(2) 当η∈[π/2, π]时, 导弹以图 9所示弹目几何关系零控拦截目标。
图9
该条件下存在A点近轨拦截与B点远轨拦截两种情况。
在A点近轨拦截时, 导弹速度前置角γA∈[0, π/2], 同样需满足sin γA=ρsin η, γA=arcsin(ρsin η), 此时
在B点远轨拦截时, 导弹速度前置角γB∈[π/2, π], 同样需满足γB=π-arcsin(ρsin η), 由几何关系可知|γB| < |η|, 此时
故当η∈[π/2, π]时, 零控拦截条件为γ=arcsin(ρsin η)。
(3) 当η∈[-π, 0]时, 同理可证零控拦截条件为γ=arcsin(ρsin η)。
观察几何关系易得到, η∈[-π/2, π/2]时对应顺轨拦截, η∈[-π, -π/2]∪[π/2, π]时对应逆轨拦截。
设定子拦截弹以PPN(见式(13))作为制导律。
由假设1可知, aT=0, 代入式(9)可得
对式(10)求一阶导并代入式(14)可得
将式(13)代入式(5)可得
对式(6)求一阶导, 并将式(15)、式(16)代入可得
对式(17)等式两边求积分得到
由式(18)可知, 在PPN的作用下, 导弹速度前置角γ与目标速度前置角η呈线性关系, 在ηOγ坐标平面内, 弹目速度前置角从初始状态(η0, γ0)开始沿斜率为(1-N)的直线变化。
基于以上分析, 可得到子拦截弹拦截无人机目标的捕获区。
定理 2 在满足假设1且目标与导弹速度比ρ保持不变的条件下, 导弹以PPN为制导律, 捕获区可表示为
式中:
η1, η5, η2, η6分别解方程组(24)~(27)得到:
为便于理解, 将定理2描述的捕获区在ηOγ平面内表示为图 10中L1, L2, L3, L4 4条绿色线段所在区域。
图10

证明 (1) 子拦截弹逆轨拦截目标时。由假设1与图 5可知, 子拦截弹拦截目标的初始状态仅可能为直线γ=η±π上的某一点, 求解捕获区即分析直线上哪些点(η, γ)可在制导律的作用下达到零控拦截条件γ=arcsin(ρsin η)。
在图 10中的黄色区域S1(包含边界)内, 有-π≤η≤0、γ≥arcsin(ρsin η), 结合式(12)可得
由式(15)可知:
PN系数N>1, 结合式(17)可知, 在S1区域内
结合图 10可知, 在η∈[-π, 0]范围内, 有且仅有处于L1区域的弹目状态可最终进入逆轨拦截条件, 易知(η3, γ3)= (-π/2, -arcsin ρ), 由此可以得到(η1, γ1)为已知直线γ1=(1-N)(η1+π/2)-arcsin ρ与γ1=η1+π的交点。由此可证L1为η∈[-π, 0]范围内的逆轨拦截捕获区。
同理可证L2为η∈[0, π]范围内的逆轨拦截捕获区。
(2) 子拦截弹顺轨拦截目标时。由假设1与图 6可知, 子拦截弹拦截目标的初始状态仅可能为直线γ=η上的某一点。
在图 10中的黄色区域
结合图 10可知, 在η∈[0, π]范围内, 有且仅有处于L3区域的弹目状态可最终进入顺轨拦截条件, 易知(η4, γ4)= (π/2, arcsin ρ), 由此可以得到(η2, γ2)为已知直线γ2=(1-N)×(η2-π/2)+arcsin ρ与γ2=η2的交点。由此可证L3为η∈[0, π]范围内的顺轨拦截捕获区。
同理可证L4为η∈[-π, 0]范围内的顺轨拦截捕获区。
3.3 子拦截弹“释放点”选择
子拦截弹“释放点”应在满足4个约束条件的基础上进行最优选择。
(1) 可拦截性约束分析
图11
由图 11可知, 在集群散布空间一定的情况下, 子拦截弹速度前置角γ越大, 对应的弹目距离D越近。设母舱全部释放子拦截弹且子拦截弹完成目标跟踪所需的总时间为t, 即释放子拦截弹t时长后子拦截弹开始进行制导拦截。则得到子拦截弹在捕获区中最大的速度前置角γmax后, 可用下式计算可拦截性约束条件下的最近释放距离Dmin1:
捕获区L1、L3与L2、L4实则为对称的两种情形, 计算γmax时只需分析L1、L3即可。
(2) 母舱探测视场角约束分析
当母舱导引头视场角φ固定时, “释放点”距离集群越近, 导引头视场对集群的覆盖范围越小。当母舱导引头视场恰好能够覆盖集群时, 对应母舱探测视场角约束条件下的最近释放距离Dmin2, 可用下式求取:
(3) 母舱探测距离约束分析
作战环境确定后, 母舱导引头有效探测距离Dmax随之确定。母舱在释放子拦截弹之前需确保已捕获目标, 因此母舱探测距离约束下最远释放距离应小于Dmax。
在约束条件(1)~(3)的基础上, 结合约束条件(4)得到可行释放距离区间(Dmin, Dmax)。
综合考虑子拦截弹拦截适宜性和母舱探测能力与距离之间的关系, 建立如下效益函数F:
使效益函数F取得最大值的D即为最佳“释放点”与集群威胁“重心”的距离, 由此可得“释放点”位置。
4 仿真分析
假设前沿部署的情报系统探测跟踪到一个无人机集群并锁定其中10个高威胁目标, 子母导弹的母舱飞行速度为500 m/s, 视场角φ=15°, 有效探测距离Dmax=5 km, 子拦截弹以PPN律进行制导, 比例系数N=3, 母舱释放子拦截弹与子拦截弹稳定跟踪目标所需总时间为2 s。目标信息如表 1所示。
表1 集群目标信息
Table 1
| 目标序号 | 惯性坐标系下位置 | 威胁度 | ||
| X/m | Y/m | Z/m | ||
| 1 | 3 400 | 79 900 | 8 100 | 0.5 |
| 2 | 3 600 | 79 700 | 7 900 | 2 |
| 3 | 3 800 | 79 900 | 8 100 | 1 |
| 4 | 3 300 | 80 100 | 8 000 | 1 |
| 5 | 3 500 | 80 100 | 8 000 | 2 |
| 6 | 3 700 | 80 100 | 7 900 | 1 |
| 7 | 3 900 | 80 200 | 8 200 | 1 |
| 8 | 3 400 | 80 500 | 8 000 | 0.5 |
| 9 | 3 600 | 80 300 | 8 200 | 1.5 |
| 10 | 3 800 | 80 600 | 7 800 | 2 |
(1) 威胁“重心”仿真
将威胁“重心”的坐标精确到个位, 利用标准粒子群算法对极值进行搜索, 能够快速准确求得模型(1)的解, 如图 12所示, 得到集群威胁“重心”在惯性坐标系OXYZ下的坐标为(80 112, 3 568, 8 006), 集群最大半径Rmax=578 m。
图12

为检验模型求解的实时性, 用i5-8250U处理器在matlab2018a环境下, 应用标准粒子群算法对该算例在相同条件下进行20次重复求解, 平均求解时间为0.041 6 s, 且20次均能求得最优解。可以证明, 本文集群威胁“重心”计算模型能够满足该制导问题的实时性要求。
该威胁“重心”与所有目标的带威胁权重距离之和f(x, y, z)=4 072。如果选取某个无人机目标作为“重心”来代表集群, min f=f(x5, y5, z5)=4 116>4 072。结合图 12可知, 选取一个虚拟点作为集群威胁“重心”而不是将某个处于集群中央的目标作为威胁“重心”, 如此设计的“重心”能更好地代表集群且可避免某个目标发生机动或丢失而对集群威胁“重心”产生较大的影响。
(2) 子拦截弹“释放点”仿真
情形 1 顺轨拦截集群
由式(26)求得子拦截弹允许的最大速度前置角γmax=68°, 由式(30)求得可拦截性约束分析下的最近释放距离Dmin1=1 233 m。同样, 求得母舱探测视场角约束条件为Dmin2= 2 457 m。求式(32)的最大值, 得到最佳释放距离为D=3 340 m。
情形 2 逆轨拦截集群
由式(24)求得子拦截弹允许的最大速度前置角γmax=52°, 由式(30)求得可拦截性约束分析下的最近释放距离Dmin1= 1 452 m, 其他约束条件不变。求式(32)的最大值, 得到最佳释放距离为D=3 371 m。
两种情形下“释放点”位置如图 13所示。
图13
图14
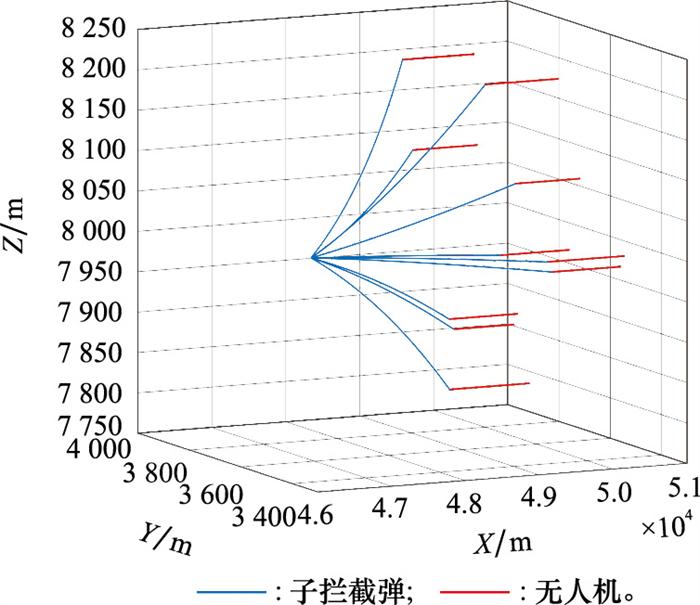
表2 子拦截弹拦截结果
Table 2
| 目标序号 | 拦截时间/s | 脱靶量/m |
| 1 | 4.384 | 0.286 |
| 2 | 4.090 | 0.279 |
| 3 | 4.393 | 0.327 |
| 4 | 4.679 | 0.696 |
| 5 | 4.659 | 0.157 |
| 6 | 4.666 | 0.315 |
| 7 | 4.845 | 0.260 |
| 8 | 5.237 | 0.223 |
| 9 | 4.955 | 0.318 |
| 10 | 5.399 | 0.075 |
5 结论
本文提出的集群威胁“重心”与子拦截弹“释放点”计算方法, 解决了母舱制导“一对多”的难题, 连通了母舱与子拦截弹的制导过程。设计的子母导弹拦截无人机集群的作战构想与制导策略, 为子母导弹拦截无人机集群提供了一种制导方案, 为中远程反制无人机集群理论提供了新的参考。
同时注意到, 该拦截方案的实现较依赖于对集群目标的稳定探测与跟踪, 如何进一步改进方案, 以降低对探测结果的依赖程度, 以及探索传感器系统的部署方案将是接下来的研究重点。
参考文献
Toward robust and intelligent drone swarm: challenges and future directions
[J].DOI:10.1109/MNET.001.1900521 [本文引用: 1]
Application of AHP to road selection
[J].
Robotic swarms in offensive maneuver
[J].
无人机集群与反无人机集群发展现状分析
[J].
Analysis of the development status of UAV clusters and anti-UAV clusters
[J].
无人机集群对要地防空的威胁及反制对策研究
[J].
Research on threat and countermeasures of UAV cluster to air defense in important places
[J].
美军反无人机技术研究
[J].
Research on american anti UAV technology
[J].
无人机粉碎机——硬杀伤式反无人机蜂群关键技术解析
[J].
Drone-smasher: the key technology analysis on the manner of hard kill to counter UAV swarm
[J].
"捕蜂"——低空近程反无人机蜂群体系构想
[J].DOI:10.3969/j.issn.1009-086x.2020.04.03 [本文引用: 1]
"Bee catching": system conception of air short range anti-UAV bee colony
[J].DOI:10.3969/j.issn.1009-086x.2020.04.03 [本文引用: 1]
低慢小无人机目标探测技术综述
[J].
Overview of target detection technology of low slow small UAV
[J].
An optimal guidance strategy for moving-target interception by a multirotor unmanned aerial vehicle swarm
[J].DOI:10.1109/ACCESS.2020.3006479 [本文引用: 1]
无人机蜂群拦截系统作战构想与关键技术
[J].
Operational conception and key technologies of unmanned aerial vehicle swarm interception system
[J].
Capturability of the 3-dimensional pure PNG law
[J].
Composite guidance for impact angle control against higher speed targets
[J].
纯比例导引律解析解与三维碰撞角约束制导
[J].
Analytical solution of pure proportional navigation guidance law and three-dimensional guidance with impact angle constraint
[J].
True proportional navigation with maneuvering target
[J].
Performance of 3D TPN against true-arbitrarily maneuvering target for exoatmospheric interception
[J].
Capturability of realistic generalized true proportional navigation
[J].
Analytical solution of 3D realistic true proportional navigation
[J].
Capture region of a gipn guidance law for missile and target with bounded maneuverability
[J].
A unified approach to proportional navigation
[J].
有限过载的三维现实真比例导引的捕获区域
[J].
Capture region of 3D realistic true proportional navigation with finite overload
[J].
Performance analysis of realistic true proportional navigation against maneuvering targets using Lyapunov-like approach
[J].
Differential geometric modeling of guidance problem for interceptors
[J].
Ideal proportional navigation for exoatmospheric interception
[J].
拦截高速目标的比例与反比例导引捕获区分析
[J].
Capture region analysis of proportional navigation and retro-proportional navigation guidance for hypersonic target interception
[J].
真比例导引反高速目标拦截能力分析
[J].
Interception capability analysis of the true proportional navigation guidance law against hypersonic targets
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}