

0 引言
天波超视距雷达(sky-wave over-the-horizon radar, SW-OTHR)通过电离层反射效应下视探测目标, 具有探测距离远、范围广, 一定程度上克服隐身目标威胁等优势, 在远程预警、海上交通管控、环境监测及预报等领域具有重要应用价值[1-2]。然而, 电离层分层结构和随机变化导致多模多径传播效应、电离层信道不稳定以及地海杂波展宽等问题, 严重影响SW-OTHR目标检测概率、探测精度等。为解决上述问题, 许多学者将多输入多输出(multiple input multiple output, MIMO)雷达体制技术[3-5]引入到SW-OTHR[6], 通过分布式MIMO雷达[7]特有的空间分集增益和波形分集增益提高信道的整体传输性能[8], 一定程度上能够抑制多模多径带来的干扰[9-10], 从而提高系统目标检测、跟踪性能[11-12]。但是, 实际建造分布式MIMO-SW-OTHR, 开展实验研究需要投入大量人力物力, 并且难以预料站点选址对系统性能的影响。因此, 在搭建实际分布式MIMO-SW-OTHR系统之前, 迫切需要研究能够综合评估在模拟真实环境中, 不同体制、不同配置条件下分布式MIMO-SW-OTHR探测性能的计算机仿真系统, 以此辅助站点选择和资源配置等。
雷达系统仿真工作早在20世纪50年代已经开始[13]。王得旺[14]在信号处理层面对MIMO雷达系统仿真进行了改进。杨守国等[15]设计了MIMO雷达半实物仿真系统。Liu等[16]基于GPU/CPU设计了MIMO雷达并行仿真系统。卢琨等[17]设计实现了传统SW-OTHR数据处理仿真系统, 考虑了不同电离层等效反射虚高引起的多模多径效应。Cuccoli等[18]建立SW-OTHR仿真软件, 但仅仅为了验证坐标配准方法的可行性, 且使用了简化的电离层模型。Saavedra等[19]设计实现了仅针对单目标检测的SW-OTHR信号处理仿真工具。然而, 现有SW-OTHR仿真系统的设计和实现多集中在子系统或者局部功能模块, 存在系统仿真不完善等问题, 并且未针对分布式MIMO-SW-OTHR搭建仿真系统。同时, 未考虑电离层对传播信号和信道空间相干性的影响[20]。
本文考虑电离层的动态性和区域变化性影响, 设计分布式MIMO-SW-OTHR仿真验证系统。该系统集成了国际参考电离层模型(international reference ionosphere, IRI)接口, 对分布式MIMO-SW-OTHR传播信号收发全路径、传播机制、多径多模效应、信号处理和目标检测等流程进行完整一体化建模仿真, 实现对分布式MIMO-SW-OTHR的性能评估和可行性验证。系统能够利用仿真分析不同布站方式和配置下的目标定位精度、信噪比、发现概率、可用度等性能, 为搭建实际分布式MIMO-SW-OTHR系统提供辅助建议。仿真结果表明该仿真系统软件具有良好的人机交互和结果可视化功能, 具备可行性、扩展性和通用性, 对后续分布式MIMO-SW-OTHR相关研究领域的技术改进与性能评估具有一定指导意义。
1 仿真系统框架
1.1 技术需求
配置参数对电离层、分布式MIMO-SW-OTHR站点和发射信号, 以及目标进行灵活配置, 完成分布式MIMO-SW-OTHR系统信号级全流程仿真, 性能指标结果以二维颜色图和表格形式进行可视化展示, 实现雷达系统在不同时间和不同布站配置下的目标定位精度、信噪比、发现概率和可用度等性能指标评估。
1.2 框架与模块设计
系统软件采用User Interface(UI)层、业务逻辑层和数据访问层三层软件架构设计。其中, UI层使用Visual Studio编译平台进行WinForm界面开发。同时, 为了增强人机交互性和界面展示直观程度, 使用ArcGIS地图控件对地面、站点、目标等进行设定和展示, 便于操作人员使用和观察; 业务逻辑层使用Visual Studio编译平台实现系统中数据接口、参数配置和交互操作等任务; 数据访问层根据配置参数, 利用Fortran语言编译的IRI接口查询电离层数据, 并且建立与Matlab平台间的函数调用动态链接库, 以此获取Matlab信号处理仿真结果。
根据数据传输顺序和仿真功能流程, 系统框架从功能上分为界面显示、信号处理、电离层仿真和布站优化4个模块, 如图 1所示。模块间保证数据传输的高效性和准确性, 模块内有充分自由度对仿真算法更新迭代, 具有良好可扩展性。
图1
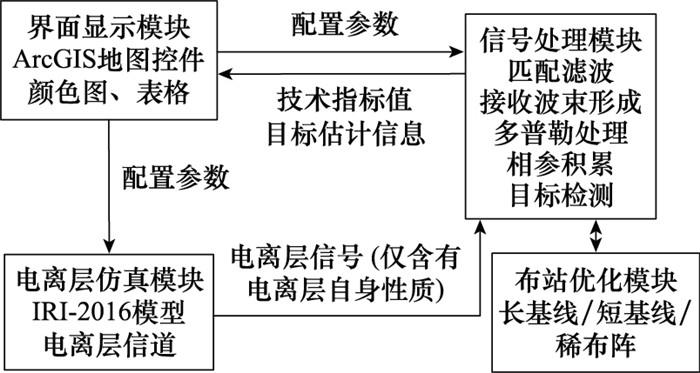
界面显示模块的输入为收发站点、发射信号、运动目标的配置参数, 以及IRI接口参数, 完成对雷达系统的配置。同时, 探测区域的选定以矩形截取的形式完成。通过动态链接库将以上参数输出到电离层仿真和信号处理模块实现系统仿真。最后, 以颜色图和表格形式将仿真结果直观展示于主界面。
电离层仿真模块的输入为仿真当前时刻、信号反射点位置和高度参数, 利用IRI-2016模型获取对应的电离层状态参数, 并且通过射线方程计算满足反射条件的多传播路径上回波信号参数: 射线仰角、传播距离、传播模式, 随后输出到信号处理模块用于生成回波信号。
信号处理模块根据以上参数生成目标回波信号, 并对其依次进行接收波束形成、匹配滤波、多普勒处理、相参/非相参积累和目标检测定位。该模块输出为信噪比、发现概率、目标定位精度、系统可用度等技术指标值。作为系统核心模块, 负责对雷达探测区域进行目标检测, 并对系统性能表现进行综合评估。
布站优化模块为系统应用拓展模块, 通过信号处理模块输出的技术指标值以及有效覆盖率, 利用站点选择方法调节站点布置, 以便从整体探测区域角度对不同站点布置进行比较, 为操作人员提供一定的分析和辅助建议。
2 功能实现
2.1 电离层仿真模块
2.1.1 IRI模型
2.1.2 MQP模型
MQP模型结构简单, 易于操作, 贴合电离层多层结构等特点。MQP模型由单层电离层模型推广, 并建立E层和F1层之间的连接层, 得到如下电离层电子浓度随高度r平滑变化的关系:
其中, E层和F1层对应的系数为
连接层对应的系数为
式中: i∈{E, F1};rm, i为i层最大电子浓度对应高度; rb, i=rm, i-ym, i为i层底高; ym, i为i层半厚度; fc, i为i层临界频率; Nm, i为i层最大电子浓度; C0=80.6;r为从地心算起的高度; rc, j为连接层最大高度。
2.1.3 射线方程
通过射线方程可以得到群时延对应的射线传播距离、地面距离与射线仰角β0、信号频率f的函数。首先, 电离层折射指数[21]为
式中: fp(r)为高度r处的等离子体频率。
其次, 针对球形地面和单层球面电离层情况, 其地面距离和射线传播距离[23]公式为
式中: r0为地球半径; rt为射线最终反射处的高度; rb=rm-ym为电离层的最低高度; rm为电离层最大电子浓度对应高度; ym为半厚度; 当r0≤r≤rb, μ(r)=1。将式(1)代入式(6)和式(7)得到多层球面电离层下地面距离和射线传播距离:
式中: 符号*代表共轭; γ为电离层入射处的射线仰角; αk(r)为
式中: IDk和IPk分别为式(6)和式(7)中第2个积分项在各层积分的解析解; lk为k层的最低高度; uk为信号在k层传播的最大高度。其中,
式中: k∈{E, j, F1};fc, k, rb, k, rm, k, ym, k为k层对应的临界频率、底高、最大电子浓度对应高度和半厚度, 与第2.1.2节中变量定义相同。
2.1.4 传播路径与模式
系统对不同收/发站点与目标之间建立射线仰角、射线传播距离和地面距离对应关系。选取某一站点和目标为发射点和接收点, 射线仰角β从-0.5°到βmax范围内变化, 间隔0.01°, 假设存在Nβ个仰角, 将每一个仰角β和预先设定的信号频率f代入式(9)和式(11), 得到该仰角对应的射线传播距离和地面距离, 以此建立对应关系表Iono。即该表的大小为Nβ×3, 每行对应射线仰角β的射线传播距离P和地面距离D。假设每个β角对应的射线仅在E层和F1层中某一层进行反射。
利用收/发站点和目标之间的真实地面距离在表Iono中进行查询, 若存在两个仰角则获取E层和F1层两种反射传播模式; 若仅存在一个仰角则获取E层或者F1层一种反射传播模式; 否则, 判定该目标点不满足电离层反射条件。其中, 在系统计算效率允许的情况下, 可在查询时采用非线性拟合的方法, 提高仰角β估计精度。
2.2 信号处理模块
2.2.1 发射信号模型
假设存在M个发射站、L个接收站、各站点含有K个天线, 系统结构如图 2所示。
图2
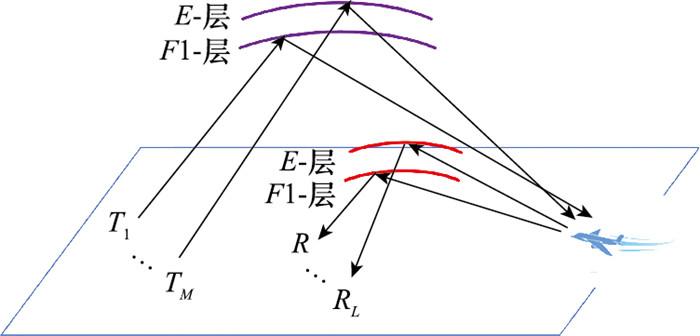
图2
分布式MIMO-SW-OTHR系统结构示意图
Fig.2
Distributed MIMO-SW-OTHR system structure diagram
分布式MIMO雷达最突出的特点在于发射信号相互正交。本文假设系统采用正交频分线性调频连续波信号, 实现发射信号之间的正交性。
第m个发射站的发射信号为
式中: u(t)=exp(jπBt2/T)为发射信号的基带复包络; fΔ代表载波频率; B为调频带宽; T为脉冲重复间隔; Pt为单站发射功率。
2.2.2 接收信号模型
根据电离层模块中射线传播距离和径向速度, 第l个接收站接收到第m个发射站发射的信号, 经第q个传播模式的回波信号为
式中: Amlq为ml路径上q模式的信号幅度,
τmlq和fDmlq为ml路径上q模式的时延和多普勒频移; Gt和Gr为发射增益和接收增益; σq为目标RCS; Rmp和Rlp为目标到第m个发射站和第l个接收站的射线传播距离; Lp和Ls分别为电离层损耗和系统损耗。第l个接收站第k个天线的接收信号为
式中: θql为第q个模式相对第l个接收站点的方位角; drl第l个接收站点的天线间隔; λ为信号波长; Qlm为第m个发射站点和第l个接收站点间存在的传播模式数量。则第l个接收站点的接收信号为
式中: cl(t)和nl(t)分别为杂波信号和噪声信号。
2.2.3 信号处理
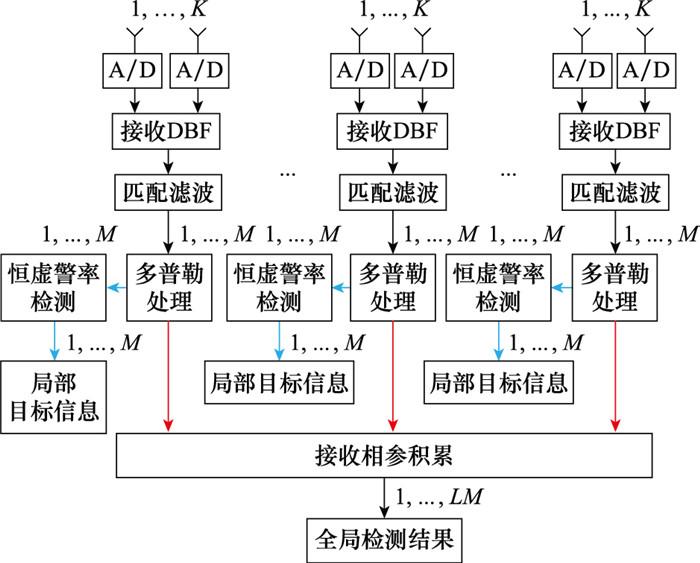
基于回波信号, 建立信号处理流程, 如图 3所示。首先进行数字接收波束形成(digital beam-forming, DBF), 然后对M个发射信号进行匹配滤波, 得到L×M维矩阵, 每个元素对应一条路径上的信号。其次, 对每个信号进行多普勒处理、接收相参积累和目标检测。本文考虑理想情况下的时延补偿和相位补偿, 使用相参积累方式对多路径信号进行融合。
图3
(1) DBF
接收信号包含目标回波、噪声信号和杂波。同时, 假设第l个接收站内不同天线的接收方位角相同, 其估计值为
第l个接收站DBF后的信号:
(2) 匹配滤波
每个接收站收到M个发射信号的回波, 根据发射信号相互正交的性质, 利用匹配滤波器可以将多个发射信号分离, 每条路径上的信号包含了目标不同角度和射线距离上的信息, 综合不同信噪比下的多条路径提高目标检测性能。
根据匹配滤波器原理, 对应于第m个发射信号的匹配滤波器的冲激响应[27]为
匹配滤波器可采用卷积方法在时域对信号yl(t)进行处理, 得到M个输出信号:
对于脉冲信号/调频连续波信号, 该操作对M个信号每个积累脉冲上的快采样时间数据进行处理, 得到相干积累脉冲数×单脉冲快时间采样点数×接收波束方向数的三维矩阵。
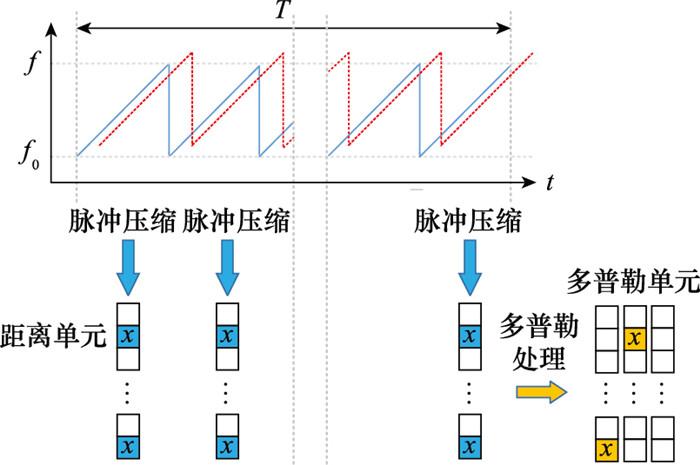
(3) 多普勒处理
对每个距离单元上的慢采样时间数据进行傅里叶变换, 实现多个脉冲信号的能量积累。以线性调频连续波信号为例, 其距离-多普勒处理过程如图 4所示。
图4
(4) 恒虚警率检测
系统利用单元平均恒虚警率(cell averaging-constant false alarm rate, CA-CFAR)检测方法[28]得到每个收发信道的局部目标信息。在检测单元附近设置保护单元和参考单元, 利用N个参考单元的值估计检测点的噪声功率:
式中: xi为第i个参考单元的值; X为总噪声功率水平估计。
门限T与虚警概率Pfa的关系为
(5) 坐标变换
利用坐标变换将各收发信道能够检测到的目标点从雷达坐标系距离、方位和径向速度转换到大地坐标系, 得到目标大地坐标系下距离、方位角和速度信息。Pulford等[29]对其有详细推导过程, 在此不再赘述。本文采用等效反射高度真实值实现坐标变换, 并对不同传播模式得到的目标位置根据信道信噪比做加权平均融合。
(6) 接收相参处理
本文仅针对点目标进行探测, 假设其在各个方向上的散射系数近似相同, 在不影响对雷达系统整体性能评估前提下, 系统考虑理想情况下对各收发信道进行接收相参处理[30]。根据传播距离真实值和发射信号初始相位真实值计算每个收发信道与第一个收发信道(i=1, j=1, 以此为参考信道)的时间差和相位差, 对相应的收发路径信号进行时间对齐和相位补偿, 如下所示:
式中: yij(t)为第i个发射站和第j个接收站对应信道上的信号;
接收相参处理将多信道进行有效积累, 增强了对目标的检测能力。经此处理后得到单信道距离-多普勒二维谱图, 并通过CA-CFAR目标检测得到在第一个接收站雷达坐标系下的目标位置信息, 包括: 距离、方位角、斜距速度, 其中, 方位角采用第一个收发信道的估计值。至此, 完成对目标的检测和定位。
2.2.4 性能指标评估
(1) 信噪比(signal to noise ratio, SNR)
对接收相参处理后的二维距离-多普勒谱图进行目标CFAR检测后, 利用估计目标位置处和噪声基底的幅度差值计算整个系统的SNR。
(2) 发现概率
为了节省计算资源和提高程序运行效率, 系统采用理论建模方法, 通过SNR和虚警概率计算发现概率。
假设目标起伏类型为Swerling 0, 即非起伏目标。回波信号包络服从广义瑞利分布[31]:
式中: A为目标回波信号幅度; r为目标回波的综合幅度; σ2为系统噪声信号功率; I0(β)为零阶修正贝塞尔函数。
只含有系统噪声时信号的概率密度函数为
根据设定的虚警概率Pfa反推得到门限值T ′:
以此门限值计算发现概率, 得到:
其中,
(3) 系统可用度
设定探测时刻前后一定间隔时间内, 不同时刻ti点处的发现概率值, 高于Pdt则表示系统在ti和ti-1内为可用状态, 否则表示系统不可用。以可用间隔时间与总间隔时间的比值作为系统可用度指标值。
(4) 定位精度
通过坐标变换后得到目标在第一个接收站地理坐标系下的地面距离估计值
2.3 布站优化模块
该模块完成对不同布站方式和站点位置的选择操作, 以工程实践中预先设定的布站配置进行人工挑选, 并输出目标函数值, 更加全面评估布站方案。
2.3.1 设定目标函数
在雷达探测时, 希望有效覆盖区域尽可能包含整体区域。设定有效覆盖率[32]为目标函数:
式中: CMIMO为有效覆盖区域VMIMO数量; CA为所有子区域数量。有效覆盖区域VMIMO的判定条件为: {ci∈VMIMO|Pd(ci)≥Pdt}, 即检测概率大于门限值Pdt的区域集合。
2.3.2 站点选择
根据应用场景, 设置长基线、短基线和不同收发站点数量的实例比对组, 通过系统仿真结果对站点布置提供参考意见。
2.4 界面显示模块
该模块不仅包含参数配置窗口和地图点选添加站点功能, 而且以可视化方式输出仿真结果。界面具有良好的交互性和功能实现的流畅性。经过系统参数和探测区域的设置后得到接收站点可接收的扇形区域和矩形目标区域。图 5以2个发射站点和4个接收站点为例, 展示了系统软件配置成功后的界面效果。
图5

3 仿真验证
3.1 仿真参数
发射信号和收发站点的配置如表 1和表 2所示。其中, 发射站点的天线数量为14个, 天线间隔为10 m, 接收站点的天线数量为30个, 天线间隔为10 m。A/B测试组和C/D测试组中收发站点的法向角分别为150°和135°。由于本文旨在分析整体探测区域内的性能指标, 因此将配置后的矩形探测区域以1经/纬度分割为多个子区域, 每个子区域中心均含有一个目标, 以此能够确定目标位置。在A、B、C和D 4组测试组中, 设定矩形探测区域左上角、右上角、左下角和右下角的位置(经度, 纬度)分别为: (111.79°, 14.91°)、(119.59°, 14.91°)、(111.79°, 6.84°)和(119.59°, 6.84°)。其RCS值设定为25 dBm2, 起伏模式为Swerling 0, 以20 m/s的速度由正东向正西飞行。另外, IRI模型的时间参数设定为: 2012年4月11日12时。
表1 仿真参数
Table 1
| 脉冲重复周期/ms | 脉冲积累数 | 工作频率/MHz | 信号类型 | 信号带宽/kHz | 采样频率/kHz | 发射功率/kW |
| 50 | 80 | 15 | FMCW | 10 | 20 | 500 |
表2 站点参数
Table 2
| 测试组 | 站点 | 站点位置(经度/纬度)/(°) | 测试组 | 站点 | 站点位置(经度, 纬度)/(°) | |
| A | 发射站-1 | (109.49, 19.82) | C | 发射站-1 | (102.64, 25.10) | |
| 接收站-1 | (110.41, 19.11) | 接收站-1 | (110.41, 19.11) | |||
| B | 发射站-1 | (109.49, 19.82) | D | 发射站-1 | (109.49, 19.82) | |
| 发射站-2 | (108.78, 19.36) | 发射站-2 | (102.64, 25.10) | |||
| 接收站-1 | (110.41, 19.11) | 接收站-1 | (110.38, 19.21) | |||
| 接收站-2 | (110.07, 18.59) | 接收站-2 | (109.83, 18.53) |
3.2 仿真结果
3.2.1 配置结果
图6

图7

图8

图9
3.2.2 仿真结果
图 10和图 11展示了系统软件对信号处理输出结果利用表格和颜色图形式呈现于主界面, 验证了性能指标可视化展示的功能。图 10仅展示了A组和B组的性能指标值。为了便于查看, 采用表格形式对4个测试组的指标统计值进行整理和展示, 如表 3所示。然而, 表 3中仅展示了最大/小值、平均值和标准差的统计量, 每个子区域的数值可进一步通过颜色图直观观察。图 11中颜色图暖红色到冷紫色的变化代表指标绝对值由高到低的变化过程。其中, SNR颜色图的数值范围为5~40 dB; 发现概率颜色图的数值范围为0~1;定位精度颜色图的数值范围为该测试组所有子区域内定位精度的最小值到最大值。另外, 颜色图中白色区域表示该子区域中心点处的目标无法通过电离层反射信号的机制探测到。透明区域表示该子区域的目标无法通过CA-CFAR检测到。颜色图的展示一方面能够直观地观察同一站点配置下, 整体探测区域内各位置处检测和定位性能的差异, 以及有效覆盖率性能表现; 另一方面有助于后续布站优化研究和重点区域资源重新分配。
图10

图10
A组和B组性能指标统计表
Fig.10
Statistical table of group A and B performance indexes
图11
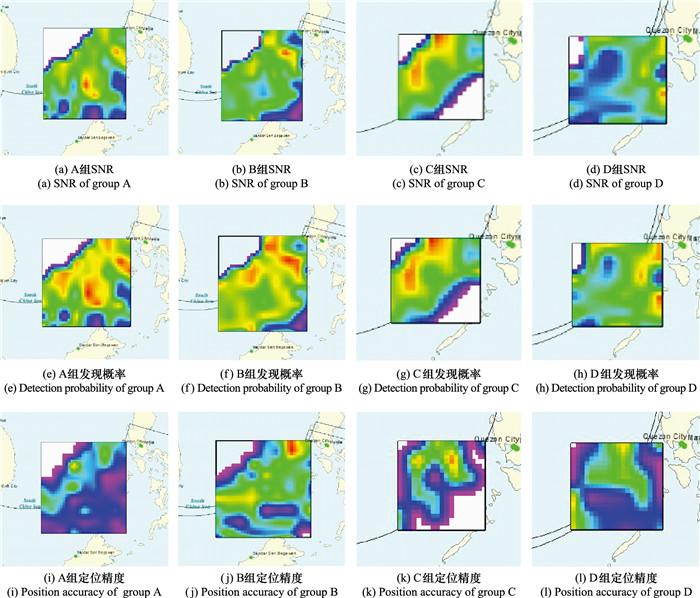
表3 技术指标统计表
Table 3
| 指标 | 统计量 | 配置A | 配置B | 配置C | 配置D |
| 信噪比/dB | 最小值 | 9.07 | 11.16 | 8.69 | 11.94 |
| 最大值 | 21.41 | 21.52 | 16.71 | 21.57 | |
| 平均值 | 16.50 | 17.45 | 13.80 | 17.13 | |
| 标准差 | 2.86 | 2.34 | 1.94 | 2.15 | |
| 发现概率 | 最小值 | 0.19 | 0.34 | 0.17 | 0.39 |
| 最大值 | 0.91 | 0.92 | 0.73 | 0.92 | |
| 平均值 | 0.69 | 0.75 | 0.53 | 0.74 | |
| 标准差 | 0.18 | 0.13 | 0.14 | 0.12 | |
| 系统可用度 | 最小值 | 0.01 | 0.01 | 0.01 | 0.01 |
| 最大值 | 0.91 | 0.92 | 0.73 | 0.92 | |
| 平均值 | 0.58 | 0.62 | 0.40 | 0.70 | |
| 标准差 | 0.30 | 0.30 | 0.26 | 0.19 | |
| 定位精度/km | 平均值 | 37.41 | 25.50 | 69.24 | 37.79 |
| 标准差 | 18.51 | 14.24 | 22.54 | 22.91 | |
| 有效覆盖率/% | - | 67.90 | 77.78 | 47.22 | 92.86 |
仿真结果表明, 对于A组和B组, 增加收发站点数量可以有效提高有效覆盖率等指标, 但SNR、发现概率指标提升较小, 定位误差的下降得益于站点相隔较近, 相干积累效果更加明显; A组和C组都为单发单收配置, 相应结果表明短基线阵列的各项性能指标均优于长基线阵列; B组和D组都为双发双收配置时, 相应结果显示D组在有效覆盖率和系统可用度两项指标上相较于B组有所提高, 其中, 有效覆盖率提升明显。在SNR和发现概率两项指标中, B组和D组性能近似。而在定位精度上, D组具有较差的性能表现。该性能比较表明长基线一定程度上导致了定位精度性能变差, 但是另一方面, 因为基线的增加使得探测区域的一部分区域由盲区变为可探测区, 增加了有效覆盖率; 与C组相比, D组在各项指标值上均有较大提升。因此, 站点布阵方式和数量需要根据应用需求进行相应的调整和优化。
4 结论
本文设计并实现集成了界面显示、电离层仿真、信号处理和布站优化模块的完整分布式MIMO-SW-OTHR仿真系统, 详细阐述了系统的软件架构和功能模块的实现方法。该系统考虑统计电离层数据, 建立IRI模型数据接口, 基于.NET框架平台, 建立动态链接库调用电离层仿真程序、Matlab信号处理程序和布站优化程序, 对雷达系统进行完整性能评估,仿真实例验证表明其符合工程实际经验。同时, 在仿真系统中扩展了布站优化模块, 对不同布站方式和站点选址进行了性能差异分析。未来将在此基础上进一步研究布站优化模块及联合定位模块, 建立更加贴近实际环境的MIMO-SW-OTHR仿真系统。
参考文献
An improved coordinate registration for over-the-horizon radar using reference sources
[J].DOI:10.3390/electronics10243086 [本文引用: 1]
OTHR multitarget tracking with a GMRF model of ionospheric parameters
[J].DOI:10.1016/j.sigpro.2020.107940 [本文引用: 1]
Target localization geometry gain in distributed MIMO radar
[J].DOI:10.1109/TSP.2021.3062197 [本文引用: 1]
Multiple-input multiple-output over-the-horizon radar: experimental results
[J].
HF skywave massive MIMO communication
[J].
Experimental results for MIMO methods applied in over-the-horizon radar
[J].DOI:10.1109/MAES.2017.170057 [本文引用: 1]
MIMO radar with widely separated antennas
[J].DOI:10.1109/MSP.2008.4408448 [本文引用: 1]
Propagation effects on high frequency skywave multiple-input-multiple-output radar
[J].
Low observable group targets detection based on space-frequency cascaded adaptive processing for MIMO OTH radar
[J].DOI:10.1007/s11045-021-00767-y [本文引用: 1]
Multi-mode propagation mode loca-lisation and spread doppler clutter suppression method for multiple-input multiple-output over-the-horizon radar
[J].
Spatial diversity in radars-models and detection performance
[J].DOI:10.1109/TSP.2005.862813 [本文引用: 1]
Distributed multistatic sky-wave over-the-horizon radar based on the doppler frequency for marine target positioning
[J].DOI:10.3390/electronics10121472 [本文引用: 1]
MIMO雷达信号处理半实物仿真系统的设计与实现
[J].
Design and implementation of semi-physical simulation system for MIMO radar signal processing
[J].
MIMO radar parallel simulation system based on CPU/GPU architecture
[J].DOI:10.3390/s22010396 [本文引用: 1]
OTHR数据处理仿真系统的设计与实现
[J].
Design and implementation of data processing simulation system for skywave over-the-horizon radar
[J].
Sky-wave over-the-horizon radar simulation tool
[J].
Ionospheric effects on HF radio wave propagation
[J].
A model of the vertical distribution of the electron concentration in the ionosphere and its application to oblique propagation studies
[J].DOI:10.1016/0021-9169(88)90074-8 [本文引用: 1]
Exact ray calculations in a quasi-parabolic ionosphere with no magnetic field
[J].DOI:10.1002/rds19683169 [本文引用: 1]
Enhanced DOA estimation exploiting multi-frequency sparse array
[J].DOI:10.1109/TSP.2021.3122292 [本文引用: 1]
Signal detection in distributed MIMO radar with non-orthogonal waveforms and sync errors
[J].DOI:10.1109/TSP.2021.3087897 [本文引用: 1]
A photonics-assisted multi-band MIMO radar network for the port of the future
[J].
Deployment of multistatic radar system using multi-objective particle swarm optimisation
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}