Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (8): 2807-2819.doi: 10.12305/j.issn.1001-506X.2024.08.28
• Guidance, Navigation and Control • Previous Articles
Multi-syndrome jammers formation trajectory preplanning method for netted radar jamming task
Weiqi ZOU, Chaoyang NIU, Wei LIU, Yanyun WANG, Jiaqi ZHAN
- School of Data and Target Engineering, PLA Strategic Support Force InformationEngineering University, Zhengzhou 450001, China
-
Received:2022-10-18Online:2024-07-25Published:2024-08-07 -
Contact:Chaoyang NIU
CLC Number:
Cite this article
Weiqi ZOU, Chaoyang NIU, Wei LIU, Yanyun WANG, Jiaqi ZHAN. Multi-syndrome jammers formation trajectory preplanning method for netted radar jamming task[J]. Systems Engineering and Electronics, 2024, 46(8): 2807-2819.
share this article
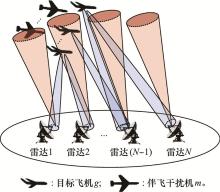
Fig.1
Multi-target penetrating netted radar scenario"
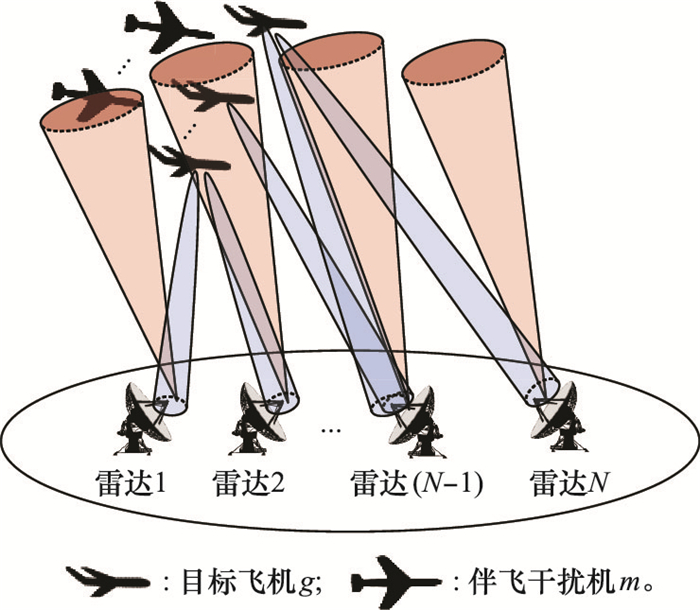
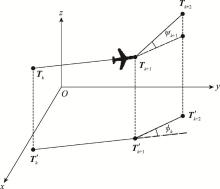
Fig.2
Turning and climbing angle calculation"
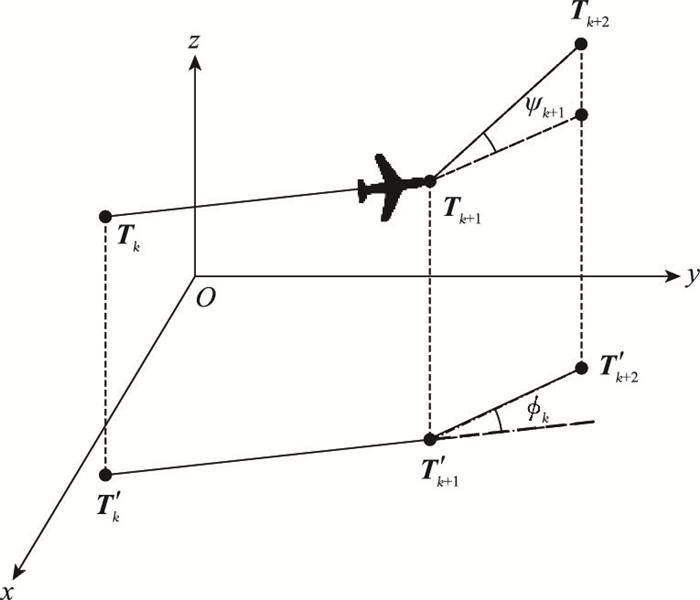
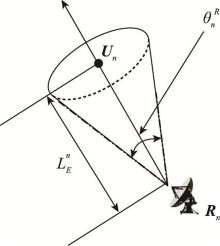
Fig.3
Model of radar threat range"
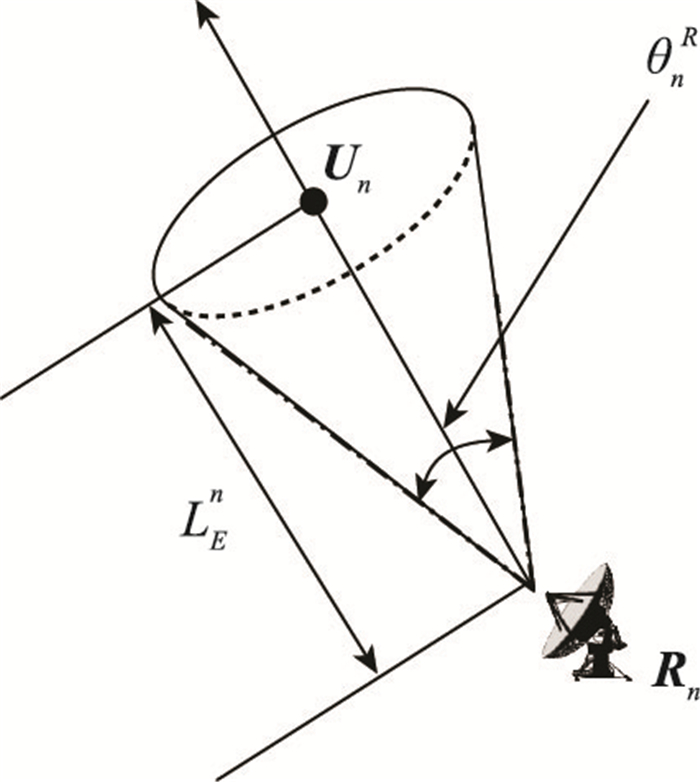
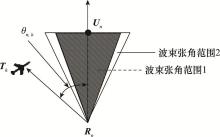
Fig.4
Determination of radar threat cost"

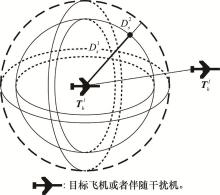
Fig.5
Security range among aircrafts"

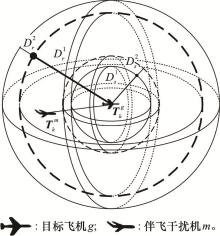
Fig.6
Reasonable range of target aircraft and corresponding jammer aircraft"
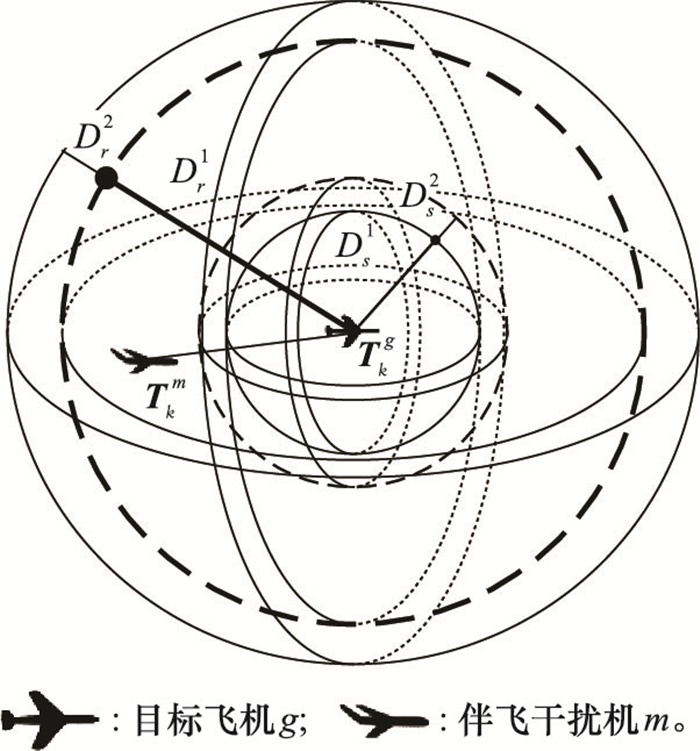
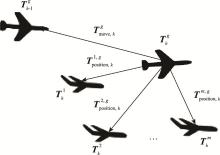
Fig.7
Schematic diagram of two types of vector"
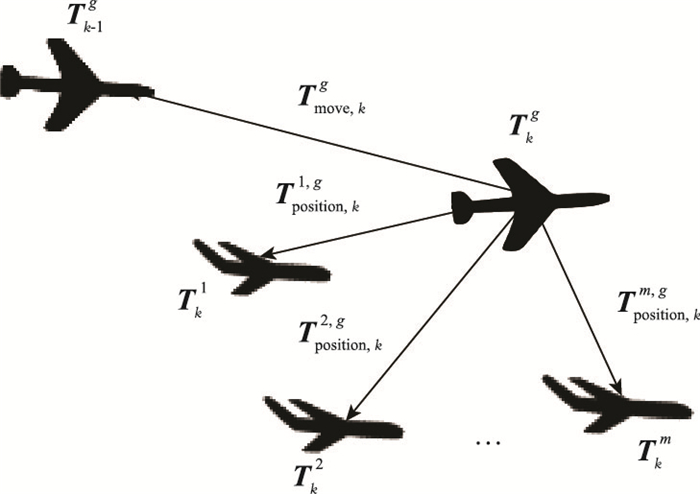
Table 1
Parameters involved in MS-TLHPSO algorithm"
| 相关参数 | 具体数值 |
| 最大迭代次数Ger | 300 |
| 粒子数I | 100 |
| 惯性系数最大值Wmax | 1 |
| 惯性系数最小值Wmin | 0.4 |
| 学习因子最大值cmax | 2.5 |
| 学习因子最小值cmin | 1.5 |
| 评估周期T1 | 4 |
| 逐航迹点学习周期T2 | 50 |
Table 2
Information of radar threats m"
| 威胁类型 | 中心坐标 | 威胁距离 |
| 雷达节点1 | (2 000, 3 500) | 3 000 |
| 雷达节点2 | (3 500, 500) | 3 000 |
| 雷达节点3 | (4 500, 5 000) | 3 000 |
| 雷达节点4 | (4 500, 7 500) | 3 000 |
| 雷达节点5 | (6 600, 2 000) | 3 000 |
| 雷达节点6 | (8 000, 5 500) | 3 000 |
Table 3
Starting and end point of the multi-syndrome jammers formation m"
| 案例 | 威胁类型 | 起点坐标 | 终点坐标 |
| 案例1 | 目标飞机1 | (2 000, 1 000, 1 500) | (4 850, 7 900, 1 600) |
| 伴飞干扰机1 | (2 040, 970, 1 460) | (4 890, 7 870, 1 560) | |
| 伴飞干扰机2 | (1 960, 1 040, 1 450) | (4 820, 7 930, 1 560) | |
| 目标飞机2 | (5 500, 1 100, 1 700) | (5 000, 8 000, 1 500) | |
| 伴飞干扰机3 | (5 460, 1 070, 1 650) | (4 970, 7 970, 1 460) | |
| 案例2 | 目标飞机1 | (1 000, 5 000, 1 500) | (7 700, 8 000, 1 600) |
| 伴飞干扰机1 | (1 030, 4 970, 1 460) | (7 730, 7 970, 1 560) | |
| 伴飞干扰机2 | (960, 5 030, 1 460) | (7 670, 8 030, 1 560) | |
| 目标飞机2 | (2 000, 1 000, 1 600) | (8 000, 7 700, 1 500) | |
| 伴飞干扰机3 | (1 970, 970, 1 560) | (7 970, 7 670, 1 460) |

Fig.8
Path planning result of MS-TLHPSO algorithm"

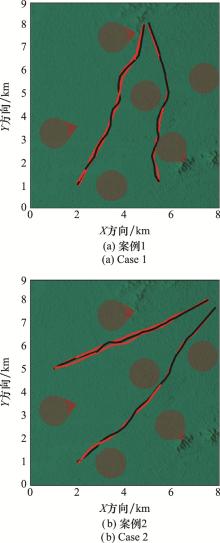
Fig.9
Plan projection of path planning result of MS-TLHPSO algorithm"


Fig.10
Comparison diagram of convergence curve of different algorithms"


Fig.11
Line chart of the optimal solution"

Table 4
Indicators of the optimal solution (case 1)"
| 算法 | 最佳值 | 最差值 | 平均值 | 标准值 |
| PSO | 61 408.48 | 121 548.60 | 97 988.52 | 14 890.010 |
| HIPSO-MSOS | 71 944.86 | 115 643.50 | 88 804.44 | 11 697.120 |
| TLHPSO | 53 232.81 | 96 403.49 | 75 743.96 | 12 239.290 |
| MSPSO | 38 532.29 | 77 287.50 | 49 390.56 | 9 067.083 |
| MS-HIPSO-MSOS | 34 992.36 | 52 625.60 | 40 684.50 | 4 381.268 |
| MS-TLHPSO | 28 267.81 | 34 743.45 | 31 519.64 | 1 770.986 |
Table 5
Indicators of the optimal solution (case 2)"
| 算法 | 最佳值 | 最差值 | 平均值 | 标准值 |
| PSO | 77 337.96 | 111 948.1 | 92 770.48 | 10 825.57 |
| HIPSO-MSOS | 67 573.74 | 108 921.2 | 85 384.60 | 11 694.55 |
| TLHPSO | 49 503.04 | 92 075.05 | 68 768.80 | 11 709.960 |
| MSPSO | 35 662.75 | 49 534.39 | 40 123.17 | 3 826.639 |
| MS-HIPSO-MSOS | 31 403.77 | 41 296.28 | 34 359.15 | 2 988.954 |
| MS-TLHPSO | 29 013.56 | 36 412.56 | 31 575.41 | 2 098.378 |
Table 6
Average value of the optimal solution of each algorithm in different initial scenarios"
| 初始场景设置 | 算法 | |||||||||
| 目标飞机数量 | 伴飞干扰机数量 | 障碍威胁数量 | 雷达威胁数量 | PSO | HIPSO-MSOS | TLHPSO | MSPSO | MS-HIPSO-MSOS | MS-TLHPSO | |
| 2 | 5 | 2 | 5 | 112 021.8 | 102 047.3 | 88 304.52 | 58 416.52 | 45 616.73 | 36 981.38 | |
| 2 | 5 | 3 | 5 | 124 920.8 | 112 531.7 | 98 072.05 | 62 730.71 | 43 647.15 | 39 319.46 | |
| 2 | 5 | 2 | 6 | 134 623.2 | 122 112.4 | 105 192.8 | 65 916.11 | 54 213.27 | 40 541.88 | |
| 2 | 5 | 3 | 6 | 139 458.3 | 126 480.2 | 106 159.8 | 70 790.07 | 54 569.38 | 42 264.37 | |
| 3 | 8 | 2 | 7 | 143 154.3 | 129 523.3 | 108 216.8 | 70 764.17 | 55 080.31 | 43 629.74 | |
| 3 | 8 | 3 | 7 | 161 610.2 | 144 658.9 | 114 317.2 | 77 080.74 | 55 089.16 | 44 525.14 | |
| 3 | 8 | 2 | 8 | 176 181.7 | 159 536.2 | 125 512.2 | 93 452.32 | 65 466.46 | 55 514.68 | |
| 3 | 8 | 3 | 8 | 189 767.2 | 171 007.3 | 138 266.4 | 93 887.86 | 67 802.71 | 57 264.87 | |
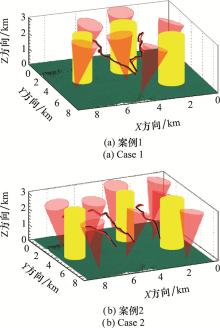
Fig.12
Track planning result in different initial scenarios"

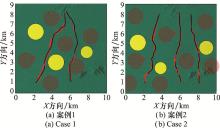
Fig.13
Plan projection of track planning result in different initial scenarios"

Table 7
Change of the cost of cooperative jamming effect"
| 案例 | 航迹未偏离情况下协同干扰效果成本 | 航迹存在偏离情况下协同干扰效果成本(20组实验) | ||
| 最大值 | 最小值 | 平均值 | ||
| 案例1 | 3 619.90 | 3 620.75 | 3 620.07 | 3 620.41 |
| 案例2 | 5 427.64 | 5 428.95 | 5 427.75 | 5 428.05 |
| 3 | LEE K S, OVINIS M, NAGARAJAN T, et al. Autonomous patrol and surveillance system using unmanned aerial vehicles[C]//Proc. of the IEEE 15th International Conference on Environment and Electrical Engineering, 2015: 1291-1297. |
| 4 | SONG B D , PARK K , KIM J .Persistent UAV delivery logistics: MILP formulation and efficient heuristic[J].Computers & Industrial Engineering,2018,120,418-428. |
| 5 | 杜云, 贾慧敏, 邵士凯, 等.面向多目标侦察任务的无人机航线规划[J].控制与决策,2021,36(5):1191-1198. |
| DU Y , JIA H M , SHAO S K , et al.UAV trajectory planning for multi-target reconnaissance missions[J].Control and Decision,2021,36(5):1191-1198. | |
| 6 | ZHANG H , XIN B , DOU L H , et al.A review of cooperative path planning of an unmanned aerial vehicle group[J].Frontiers of Information Technology & Electronic Engineering,2020,21(12):1671-1694. |
| 7 |
CHEN Q Y , LU Y F , JIA G W , et al.Path planning for UAVs formation reconfiguration based on Dubins trajectory[J].Journal of Central South University,2018,25(11):2664-2676.
doi: 10.1007/s11771-018-3944-z |
| 8 |
LIU Y , ZHANG X J , ZHANG Y , et al.Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J].Chinese Journal of Aeronautics,2019,32(6):1504-1519.
doi: 10.1016/j.cja.2019.03.026 |
| 9 | LIU W, ZHENG Z, CAI K Y. Distributed on-line path planner for multi-UAV coordination using bi-level programming[C]//Proc. of the IEEE 25th Chinese Control and Decision Confe-rence, 2013: 5128-5133. |
| 10 | BOUZID Y , BESTAOUI Y , SIGUERDIDJANE H .Guidance-control system of a quadrotor for optimal coverage in cluttered environment with a limited onboard energy: complete software[J].Journal of Intelligent & Robotic Systems,2019,95(2):707-730. |
| 11 |
SHAO S , SHI W , ZHAO Y , et al.A new method of solving UAV trajectory planning under obstacles and multi-constraint[J].IEEE Access,2021,9,161161-161180.
doi: 10.1109/ACCESS.2021.3132650 |
| 12 |
CHAI X Z , ZHENG Z S , XIAO J M , et al.Multi-strategy fusion differential evolution algorithm for UAV path planning in complex environment[J].Aerospace Science and Technology,2022,121,107287.
doi: 10.1016/j.ast.2021.107287 |
| 13 |
HE W J , QI X G , LIU L F .A novel hybrid particle swarm optimization for multi-UAV cooperate path planning[J].Applied Intelligence,2021,51(10):7350-7364.
doi: 10.1007/s10489-020-02082-8 |
| 1 | 张养瑞. 对组网雷达的多机伴随式协同干扰技术研究[D]. 北京: 北京理工大学, 2015. |
| ZHANG Y R. Research on key technologies of cooperative ECM in multi-syndrome jammers for countering radar net[D]. Beijing: Beijing Institute of Technology, 2015. | |
| 2 |
DENG C , WANG S W , HUANG Z , et al.Unmanned aerial vehicles for power line inspection: a cooperative way in platforms and communications[J].Journal of Communications,2014,9(9):687-692.
doi: 10.12720/jcm.9.9.687-692 |
| 14 |
CHENG X M , CAO D , LI C T .Survey of cooperative path planning for multiple unmanned aerial vehicles[J].Applied Mechanics and Materials,2014,668/669,388-393.
doi: 10.4028/www.scientific.net/AMM.668-669.388 |
| 15 |
ZHANG D F , DUAN H B .Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning[J].Neurocomputing,2018,313,229-246.
doi: 10.1016/j.neucom.2018.06.032 |
| 16 |
WANG Z , LIU L , LONG T .Minimum-time trajectory planning for multi-unmanned-aerial-vehicle cooperation using sequential convex programming[J].Journal of Guidance, Control, and Dynamics,2017,40(11):2976-2982.
doi: 10.2514/1.G002349 |
| 17 | WU Q P, ZHOU S L, YAN S, et al. A cooperative region surveillance strategy for multiple UAVs[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 1744-1748. |
| 18 |
ZHEN Z Y , XING D G , GAO C .Cooperative search-attack mission planning for multi-UAV based on intelligent self-organi- zed algorithm[J].Aerospace Science and Technology,2018,76,402-411.
doi: 10.1016/j.ast.2018.01.035 |
| 19 |
杨旭, 王锐, 张涛.面向无人机集群路径规划的智能优化算法综述[J].控制理论与应用,2020,37(11):2291-2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T .Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J].Control Theory & Applications,2020,37(11):2291-2302.
doi: 10.7641/CTA.2020.00105 |
|
| 20 | 赵畅, 刘允刚, 陈琳, 等.面向元启发式算法的多无人机路径规划现状与展望[J].控制与决策,2022,37(5):1102-1115. |
| ZHAO C , LIU Y G , CHEN L , et al.Research and development trend of multi-UAV path planning based on metaheuristic algorithm[J].Control and Decision,2022,37(5):1102-1115. | |
| 21 |
程凝怡, 刘志乾, 李昱奇.一种基于Dijkstra的多约束条件下智能飞行器航迹规划算法[J].西北工业大学学报,2020,38(6):1284-1290.
doi: 10.3969/j.issn.1000-2758.2020.06.018 |
|
CHENG N Y , LIU Z Q , LI Y Q .A Dijkstra based intelligent aircraft with multiple constraints track planning algorithm[J].Journal of Northwestern Polytechnical University,2020,38(6):1284-1290.
doi: 10.3969/j.issn.1000-2758.2020.06.018 |
|
| 22 | LIU X, GONG D X. A comparative study of A-star algorithms for search and rescue in perfect maze[C]//Proc. of the IEEE International Conference on Electric Information and Control Engineering, 2011: 24-27. |
| 23 |
SONG R , LIU Y C , BUCKNALL R .Smoothed A * algorithm for practical unmanned surface vehicle path planning[J].Applied Ocean Research,2019,83,9-20.
doi: 10.1016/j.apor.2018.12.001 |
| 24 | YERSHOVA A, JAILLET L, SIMÉON T, et al. Dynamic-domain RRTs: efficient exploration by controlling the sampling domain[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2005: 3856-3861. |
| 25 | SUN Q P, LI M, WANG T H, et al. UAV path plan-ning based on improved rapidly-exploring random tree[C]//Proc. of the Chinese Control and Decision Conference, 2018: 6420-6424. |
| 26 |
BEHNCK L P , DOERING D , PEREIRA C E , et al.A modified simulated annealing algorithm for UAVs path planning[J].IFAC-Papersonline,2015,48(10):63-68.
doi: 10.1016/j.ifacol.2015.08.109 |
| 27 |
ZENG X P , LI Y M , QIN J .A dynamic chain-like agent gene-tic algorithm for global numerical optimization and feature selec- tion[J].Neurocomputing,2009,72(4-6):1214-1228.
doi: 10.1016/j.neucom.2008.02.010 |
| 28 |
TSAI C C , HUANG H C , CHAN C K .Parallel elite genetic algorithm and its application to global path planning for autonomous robot navigation[J].IEEE Trans.on Industrial Electro-nics,2011,58(10):4813-4821.
doi: 10.1109/TIE.2011.2109332 |
| 29 |
ZHONG L , LUO Q , WEN D , et al.A task assignment algorithm for multiple aerial vehicles to attack targets with dynamic values[J].IEEE Trans.on Intelligent Transportation Systems,2013,14(1):236-248.
doi: 10.1109/TITS.2012.2210882 |
| 30 |
WU H S , LI H , XIAO R B , et al.Modeling and simulation of dynamic ant colony's labor division for task allocation of UAV swarm[J].Physica A: Statistical Mechanics and its Applications,2018,491,127-141.
doi: 10.1016/j.physa.2017.08.094 |
| 31 | CHEN D B , ZHAO C X .Particle swarm optimization based on endocrine regulation mechanism[J].Control Theory and Applications,2007,24(6):126-134. |
| 32 | ZHANG Q R, GU G C. Path planning based on improved binary particle swarm optimization algorithm[C]//Proc. of the IEEE Conference on Robotics, Automation and Mechatronics, 2008: 462-466. |
| 33 |
ZHANG X Y , DUAN H B .An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning[J].Applied Soft Computing,2015,26,270-284.
doi: 10.1016/j.asoc.2014.09.046 |
| 34 | ALJARAH I, LUDWIG S A. A new clustering approach based on glowworm swarm optimization[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2013: 2642-2649. |
| 35 |
GOEL U , VARSHNEY S , JAIN A , et al.Three dimension path planning for UAVs in dynamic environment using glow-worm swarm optimization[J].Procedia Computer Science,2018,133,230-239.
doi: 10.1016/j.procs.2018.07.028 |
| 36 |
SONG P C , PAN J S , CHU S C .A parallel compact cuckoo search algorithm for three-dimensional path planning[J].Applied Soft Computing,2020,94,106443.
doi: 10.1016/j.asoc.2020.106443 |
| 37 |
GAING Z L .Particle swarm optimization to solving the economic dispatch considering the generator constraints[J].IEEE Trans.on Power Systems,2003,18(3):1187-1195.
doi: 10.1109/TPWRS.2003.814889 |
| 38 |
LALWANI S , SHARMA H , SATAPATHY S C , et al.A survey on parallel particle swarm optimization algorithms[J].Arabian Journal for Science and Engineering,2019,44(4):2899-2923.
doi: 10.1007/s13369-018-03713-6 |
| 39 |
SANCHEZ-GARCIA J , REINA D G , TORAL S L .A distributed PSO-based exploration algorithm for a UAV network assisting a disaster scenario[J].Future Generation Computer Systems—the International Journal of Escience,2019,90,129-148.
doi: 10.1016/j.future.2018.07.048 |
| 40 |
SHAO S K , PENG Y , HE C L , et al.Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J].ISA Transactions,2020,97,415-430.
doi: 10.1016/j.isatra.2019.08.018 |
| 41 |
AHMED G , SHELTAMI T , MAHMOUD A , et al.IoD swarms collision avoidance via improved particle swarm optimization[J].Transportation Research Part A: Policy and Practice,2020,142,260-278.
doi: 10.1016/j.tra.2020.09.005 |
| 42 |
PHUNG M D , HA Q P .Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J].Applied Soft Computing,2021,107,107376.
doi: 10.1016/j.asoc.2021.107376 |
| 43 |
SHAO Z , YAN F , ZHOU Z , et al.Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J].Applied Sciences,2019,9(13):2621.
doi: 10.3390/app9132621 |
| 44 |
WANG Y B , BAI P , LIANG X L , et al.Reconnaissance mission conducted by UAV swarms based on distributed PSO path planning algorithms[J].IEEE Access,2019,7,105086-105099.
doi: 10.1109/ACCESS.2019.2932008 |
| 45 | HAGHIGHI H , SADATI S H , DEHGHAN S M M , et al.Hybrid form of particle swarm optimization and genetic algorithm for optimal path planning in coverage mission by cooperated unmanned aerial vehicles[J].Journal of Aerospace Technology and Management,2020,12,e4320. |
| 46 |
LIU Y , ZHANG X J , ZHANG Y , et al.Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J].Chinese Journal of Aeronautics,2019,32(6):1504-1519.
doi: 10.1016/j.cja.2019.03.026 |
| 47 | 张大琳, 易伟, 孔令讲.面向组网雷达干扰任务的多干扰机资源联合优化分配方法[J].雷达学报,2021,10(4):595-606. |
| ZHANG D L , YI W , KONG L J .Optimal joint allocation of multi jammer resources for jamming netted radar system[J].Journal of Radars,2021,10(4):595-606. | |
| 48 |
DAUM F .Radar handbook[J].IEEE Aerospace and Electronic Systems Magazine,2008,23(5):41.
doi: 10.1109/MAES.2008.4523916 |
| 49 |
LIU W , WANG Y L , LIU J , et al.Performance analysis of adaptive detectors for point targets in subspace interference and Gaussian noise[J].IEEE Trans.on Aerospace and Electronic Systems,2018,54(1):429-441.
doi: 10.1109/TAES.2017.2760718 |
| 50 |
FANG Z X , WEI Z Q , CHEN X , et al.Stochastic geometry for automotive radar interference with RCS characteristics[J].IEEE Wireless Communications Letters,2020,9(11):1817-1820.
doi: 10.1109/LWC.2020.3003064 |
| 51 |
YI W , YUAN Y , HOSEINNEZHAD R , et al.Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems[J].IEEE Trans.on Signal Processing,2020,68,1602-1617.
doi: 10.1109/TSP.2020.2976587 |
| [1] | Yaling ZHUO, Xiang LI, Lei ZUO, Juan HU. Power allocation algorithm with random data packet loss in netted radar [J]. Systems Engineering and Electronics, 2024, 46(6): 1957-1966. |
| [2] | Dejiang LU, Xing WANG, You CHEN, Xing HU. Adaptive scheduling method of joint multi-resource for cooperative interference of networked radar system [J]. Systems Engineering and Electronics, 2023, 45(9): 2744-2754. |
| [3] | Shufeng GONG, Weijun LONG, De BEN, Minghai PAN. Adaptive fuzzy CFAR detection fusion algorithm for netted radar [J]. Systems Engineering and Electronics, 2022, 44(1): 100-107. |
| [4] | Tianqi HUANG, Buhong WANG, Jiwei TIAN. False target deception jamming optimized method for centralized netted radar [J]. Systems Engineering and Electronics, 2020, 42(7): 1484-1490. |
| [5] | DING Jian-jiang, HUA Zhong-he, ZHAO Zhi-qiang. Methodology of test and examination on netted radar systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2422-2425. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||