Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (12): 3949-3957.doi: 10.12305/j.issn.1001-506X.2023.12.25
• Guidance, Navigation and Control • Previous Articles
Coverage path planning based on improved cellular decomposition
Jingyu WU1,2, Shiqiang ZHU2,3, Wei SONG2,3,*, Haolei SHI4, Zenan WU4
- 1. Ocean College, Zhejiang University, Zhoushan 316021, China
2. Robotics Institute, Zhejiang University, Ningbo 315400, China
3. Zhijiang Lab, Hangzhou 311121, China
4. Zhoushan Institute of Calibration and Testing for Qualitative and Technical Supervision, Zhoushan 316013, China
-
Received:2022-11-22Online:2023-11-25Published:2023-12-05 -
Contact:Wei SONG
CLC Number:
Cite this article
Jingyu WU, Shiqiang ZHU, Wei SONG, Haolei SHI, Zenan WU. Coverage path planning based on improved cellular decomposition[J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957.
share this article

Fig.1
Path fragments generation"


Fig.2
Flowchart of path fragment mergency"


Fig.3
Two situations meeting the mergency requirements"


Fig.4
Path generated after adjusting grid arrangement order in the column"


Fig.5
Result of preliminary cellular mergence"


Fig.6
Generation of topology map"


Fig.7
Flowchart of the first solution"

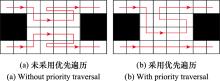
Fig.8
Schematic diagram of priority traversal effect"


Fig.9
Inserting CNext into Nmin-1 of CNav1 with positive order"


Fig.10
Results of the first solution"


Fig.11
Comparison of grid arrangement order adjustment"


Fig.12
Comparison of paths planned before and after cells mergence"

Fig.13
Result after the second cell mergence"


Fig.14
Result of the second solution"


Fig.15
Result after the third cellular mergence"


Fig.16
Result of the third solution"


Fig.17
Path planning results of different algorithms in Scenario 1"


Fig.18
Path planning results of different algorithms in Scenario 2"

Table 1
Comparison of path planning results of different algorithms in Scenario 1"
| 算法 | 单元数量/个 | 路径长度/个 | 路径重复率/% | 转向/次 | 等效路径长度/个 |
| 本文算法 | 37, 25, 24 | 1 366 | 8.07 | 306 | 1 978 |
| Boustrophedon 分解+贪心算法 | 37 | 1 446 | 14.40 | 338 | 2 122 |
| Boustrophedon 分解+遗传算法 | 37 | 1 487 | 17.64 | 350 | 2 187 |
| 生物激励神经网络算法 | - | 1 461 | 15.59 | 434 | 2 329 |
Table 2
Comparison of path planning results of different algorithms in Scenario 2"
| 算法 | 单元数量/个 | 路径长度/个 | 路径重复率/% | 转向/次 | 等效路径长度/个 |
| 本文算法 | 47, 31, 31 | 1 457 | 13.39 | 334 | 2 125 |
| Boustrophedon 分解+贪心算法 | 39 | 1 678 | 30.58 | 394 | 2 466 |
| Boustrophedon 分解+遗传算法 | 39 | 1 614 | 25.60 | 388 | 2 390 |
| 生物激励神经网络算法 | - | 1 669 | 29.88 | 512 | 2 693 |
| 1 | 伍跃飞, 李建微, 毕胜, 等. 面向山地徒步应急救援路径规划的改进蚁群算法研究[J]. 地球信息科学学报, 2023, 25 (1): 90- 101. |
| WU Y F , LI J W , BI S , et al. Research on improved ant colony algorithm for mountain hiking emergency rescue path planning[J]. Journal of Geo-information Science, 2023, 25 (1): 90- 101. | |
| 2 |
HUANG G H , MA Q L . Research on path planning algorithm of autonomous vehicles based on improved RRT algorithm[J]. International Journal of Intelligent Transportation Systems Research, 2022, 20 (1): 170- 180.
doi: 10.1007/s13177-021-00281-2 |
| 3 | CUI J Y, WU D Q, MANSOUR R F. Research on EVRP of cold chain logistics distribution based on improved ant colony algorithm[C]// Proc. of the 8th International Conference on Artificial Intelligence and Security, 2022: 537-548. |
| 4 |
HONG Z H , SUN P F , TONG X H , et al. Improved A-star algorithm for long-distance off-road path planning using terrain data map[J]. ISPRS International Journal of Geo-Information, 2021, 10 (11): 785.
doi: 10.3390/ijgi10110785 |
| 5 | ZHANG Y , LI L L , LIN H C , et al. Development of path planning approach using improved A-star algorithm in AGV system[J]. Journal of Internet Technology, 2019, 20 (3): 915- 924. |
| 6 | RASEKHIPOUR Y , KHAJEPOUR A , CHEN S K , et al. A potential field-based model predictive path-planning controller for autonomous road vehicles[J]. IEEE Trans.on Intelligent Transportation Systems, 2016, 18 (5): 1255- 1267. |
| 7 |
WANG J , LI B , MENG Q H . Kinematic constrained bi-directional RRT with efficient branch pruning for robot path planning[J]. Expert Systems with Applications, 2021, 170, 114541.
doi: 10.1016/j.eswa.2020.114541 |
| 8 |
PHAM H V , LAM T N . A new method using knowledge reasoning techniques for robot performance in coverage path planning[J]. International Journal of Computer Applications in Technology, 2019, 60 (1): 57- 64.
doi: 10.1504/IJCAT.2019.099503 |
| 9 |
刘洋成, 耿端阳, 兰玉彬, 等. 基于自动导航的农业装备全覆盖路径规划研究进展[J]. 中国农机化学报, 2020, 41 (11): 185- 192.
doi: 10.13733/j.jcam.issn.2095-5553.2020.11.028 |
|
LIU Y C , GENG D Y , LAN Y B , et al. Research progress of agricultural equipment full coverage path planning based on automatic navigation[J]. Journal of Chinese Agricultural Mechanization, 2020, 41 (11): 185- 192.
doi: 10.13733/j.jcam.issn.2095-5553.2020.11.028 |
|
| 10 |
代峰燕, 高庆珊, 陈家庆, 等. 储油罐清洗机器人全覆盖路径规划研究[J]. 机械设计与制造, 2020, 58 (2): 263- 266.
doi: 10.19356/j.cnki.1001-3997.2020.02.066 |
|
DAI F Y , GAO Q S , CHEN J Q , et al. Research of full covered path planning for oil tank cleaning robot[J]. Machinery Design and Manufacture, 2020, 58 (2): 263- 266.
doi: 10.19356/j.cnki.1001-3997.2020.02.066 |
|
| 11 |
ZHU D Q , TIAN C , SUN B , et al. Complete coverage path planning of autonomous underwater vehicle based on GBNN algorithm[J]. Journal of Intelligent and Robotic Systems, 2019, 94 (1): 237- 249.
doi: 10.1007/s10846-018-0787-7 |
| 12 |
ZHU D Q , ZHOU B , YANG S X . A novel algorithm of multi-AUVs task assignment and path planning based on biologically inspired neural network map[J]. IEEE Trans.on Intelligent Vehicles, 2021, 6 (2): 333- 342.
doi: 10.1109/TIV.2020.3029369 |
| 13 |
VAN P H , ASADI F , ABUT N , et al. Hybrid spiral STC-hedge algebras model in knowledge reasonings for robot cove-rage path planning and its applications[J]. Applied Sciences, 2019, 9 (9): 1909.
doi: 10.3390/app9091909 |
| 14 |
DONG W , LIU S S , DING Y , et al. An artificially weighted spanning tree coverage algorithm for decentralized flying robots[J]. IEEE Trans.on Automation Science and Engineering, 2020, 17 (4): 1689- 1698.
doi: 10.1109/TASE.2020.2971324 |
| 15 |
JANCHIV A , BATSAIKHAN D , KIM B S , et al. Time-efficient and complete coverage path planning based on flow networks for multi-robots[J]. International Journal of Control, Automation and Systems, 2013, 11 (2): 369- 376.
doi: 10.1007/s12555-011-0184-5 |
| 16 | 胡诗宇. 清洁机器人的定位与全覆盖路径规划研究[D]. 南京: 东南大学, 2019. |
| HU S Y. Research on the localization and full coverage path planning for a cleaning robot[D]. Nanjing: Southeast University, 2019. | |
| 17 |
GURUPRASAD K R , RANJITHA T D . CPC algorithm: extra area coverage by a mobile robot using approximate cellular decomposition[J]. Robotica, 2021, 39 (7): 1141- 1162.
doi: 10.1017/S026357472000096X |
| 18 | LATOMBE J C . Exact cell decomposition robot motion planning[M]. Boston: Springer, 1991. |
| 19 |
CHOSET H . Coverage of known spaces: the boustrophedon cellular decomposition[J]. Autonomous Robots, 2000, 9 (3): 247- 253.
doi: 10.1023/A:1008958800904 |
| 20 | 张毅, 施明瑞. 基于单元分解的改进D* lite路径规划算法[J]. 重庆邮电大学学报(自然科学版), 2021, 33 (6): 1007- 1013. |
| ZHANG Y , SHI M R . Improved D* lite path planning algorithm based on cell decomposition[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2021, 33 (6): 1007- 1013. | |
| 21 | MISINO F. Development of a multi-UAS coverage planning algorithm based on the ant colony optimization[D]. Turin: Polytechnic University of Turin, 2022. |
| 22 |
ACAR E U , CHOSET H , RIZZI A A , et al. Morse decompositions for coverage tasks[J]. International Journal of Robotics Research, 2002, 21 (4): 331- 344.
doi: 10.1177/027836402320556359 |
| 23 |
HAN Y L , SHAO M , WU Y Z , et al. An improved complete coverage path planning method for intelligent agricultural machinery based on backtracking method[J]. Information, 2022, 13 (7): 313.
doi: 10.3390/info13070313 |
| 24 |
TANG G , TANG C Q , ZHOU H , et al. R-DFS: a coverage path planning approach based on region optimal decomposition[J]. Remote Sensing, 2021, 13 (8): 1525.
doi: 10.3390/rs13081525 |
| 25 |
KHOSRAVANI M E , VAHDANJOO M , JENSEN A L , et al. An arable field for benchmarking of metaheuristic algorithms for capacitated coverage path planning problems[J]. Agronomy, 2020, 10 (10): 1454.
doi: 10.3390/agronomy10101454 |
| 26 |
MAJEED A , LEE S . A new coverage flight path planning algorithm based on footprint sweep fitting for unmanned aerial vehicle navigation in urban environments[J]. Applied Sciences, 2019, 9 (7): 1470.
doi: 10.3390/app9071470 |
| 27 |
PHUNG M D , QUACH C H , DINH T H , et al. Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection[J]. Automation in Construction, 2017, 81, 25- 33.
doi: 10.1016/j.autcon.2017.04.013 |
| 28 | SHIVGAN R, DONG Z. Energy-efficient drone coverage path planning using genetic algorithm[C]//Proc. of the IEEE 21st International Conference on High Performance Switching and Routing, 2020. |
| 29 |
LE A V , ARUNMOZHI M , VEERAJAGADHESWAR P , et al. Complete path planning for a tetris-inspired self-reconfigurable robot by the genetic algorithm of the traveling salesman problem[J]. Electronics, 2018, 7 (12): 344.
doi: 10.3390/electronics7120344 |
| 30 |
LAKSHMANAN A K , MOHAN R E , RAMALINGAM B , et al. Complete coverage path planning using reinforcement learning for tetromino based cleaning and maintenance robot[J]. Automation in Construction, 2020, 112, 103078.
doi: 10.1016/j.autcon.2020.103078 |
| 31 |
KYAW P T , PAING A , THU T T , et al. Coverage path planning for decomposition reconfigurable grid-maps using deep reinforcement learning based travelling salesman problem[J]. IEEE Access, 2020, 8, 225945- 225956.
doi: 10.1109/ACCESS.2020.3045027 |
| [1] | Jie HU, Fan BAO, Xiaozhu SHI. Airport gate assignment strategy based on greedy-genetic algorithm [J]. Systems Engineering and Electronics, 2023, 45(11): 3555-3564. |
| [2] | SUN Yu, YAO Pei-yang, LI Ming-hui, LI Fan. Adaptive adjusting method of command and control structure of army organization [J]. Systems Engineering and Electronics, 2016, 38(9): 2086-2092. |
| [3] | CHEN Pan, WU Xiao-feng, CHEN Yun. Method of call search for Markovian motion targets using UUV cooperation [J]. Journal of Systems Engineering and Electronics, 2012, 34(8): 1630-1634. |
| [4] | LI Yi-bing, ZHANG Xu, YE Fang, GAO Zhen-guo. Adjustable fairness dynamic subcarrier allocation algorithm for SC-FMDA systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(6): 1377-1382. |
| [5] | HE Zhi-hong, LI Guo-jun, LI Shu-guang. Componentwise complementary cycles in locally almost regular multipartite tournaments [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2513-2515. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||