Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (4): 973-981.doi: 10.12305/j.issn.1001-506X.2023.04.05
• Electronic Technology • Previous Articles
Partially decoupling based nonlinear digital interference cancellation algorithm
Zhongpu CUI, Songhu GE, Yaxing LI, Yu GUO, Jinling XING, Jin MENG
- National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan 430033, China
-
Received:2022-03-29Online:2023-03-29Published:2023-03-28 -
Contact:Songhu GE
CLC Number:
Cite this article
Zhongpu CUI, Songhu GE, Yaxing LI, Yu GUO, Jinling XING, Jin MENG. Partially decoupling based nonlinear digital interference cancellation algorithm[J]. Systems Engineering and Electronics, 2023, 45(4): 973-981.
share this article

Fig.1
System architecture of full-duplex communication"
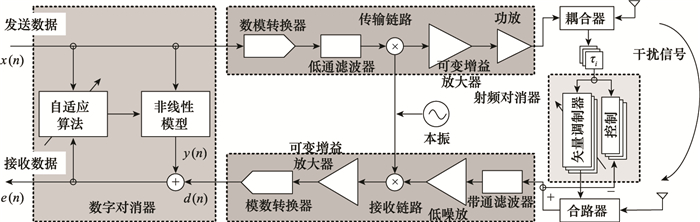
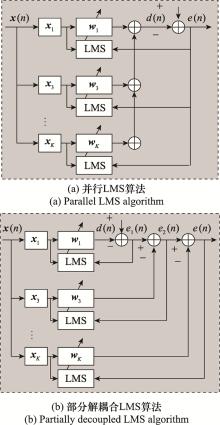
Fig.2
Algorithm principle block diagram"
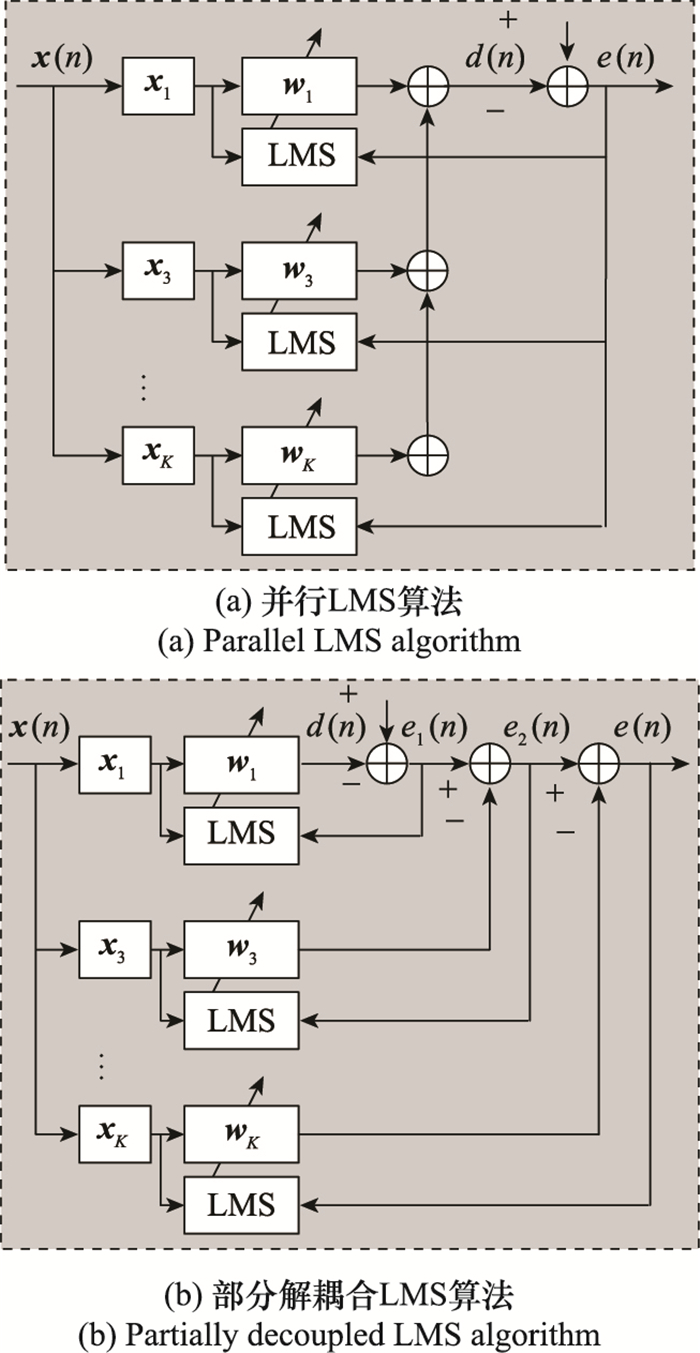
Table 1
Mean square error of three algorithms under different input interference signal ratios dBm"
| 阶次 | 线性模型维纳解 | 非线性模型维纳解 | 部分解耦合模型维纳解 | ||||||||
| 0 dB | 10 dB | 20 dB | 0 dB | 10 dB | 20 dB | 0 dB | 10 dB | 20 dB | |||
| k=1 | -19.394 1 | -16.018 1 | -7.937 4 | -19.384 1 | -16.018 1 | -7.937 4 | -19.384 1 | -16.018 1 | -7.937 4 | ||
| k=3 | -19.413 9 | -16.034 8 | -7.944 5 | -20.015 9 | -20.015 9 | -19.992 1 | -19.553 2 | -19.7116 | -19.051 1 | ||
| k=5 | -19.398 9 | -15.987 7 | -7.993 3 | -19.983 1 | -19.983 1 | -20.026 0 | -19.565 5 | -19.806 8 | -19.348 0 | ||
| k=7 | -19.383 9 | -16.009 7 | -7.985 8 | -20.019 4 | -20.019 4 | -19.983 1 | -19.555 1 | -19.884 3 | -19.408 6 | ||
| k=9 | -19.379 1 | -16.006 6 | -7.955 7 | -19.970 0 | -19.970 0 | -19.969 6 | -19.551 4 | -19.886 5 | -19.411 9 | ||
Table 2
Upper bounds of iteration steps of different nonlinear orders in the mean sense of three algorithms"
| 阶次 | 方法 | ||
| 线性LMS | 非线性LMS | 部分解耦合LMS | |
| k=1 | 1.078 0 | 1.078 0 | 1.078 0 |
| k=3 | 1.078 0 | 0.639 6 | 1.385 6 |
| k=5 | 1.078 0 | 0.485 1 | 1.734 8 |
| k=7 | 1.078 0 | 0.407 9 | 2.115 8 |
| k=9 | 1.078 0 | 0.362 1 | 2.515 5 |
Table 3
Upper bounds of iteration steps of different nonlinear orders in the mean square sense of three algorithms"
| 阶次 | 方法 | ||
| 线性LMS | 非线性LMS | 部分解耦合LMS | |
| k=1 | 0.768 5 | 0.768 5 | 0.768 5 |
| k=3 | 0.768 5 | 0.431 9 | 0.986 0 |
| k=5 | 0.768 5 | 0.317 9 | 1.204 7 |
| k=7 | 0.768 5 | 0.259 2 | 1.404 8 |
| k=9 | 0.768 5 | 0.222 6 | 1.572 4 |
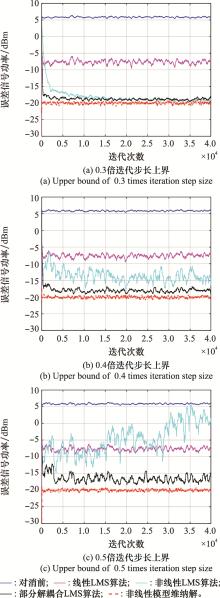
Fig.3
Error signal power of three algorithms with different iteration steps"

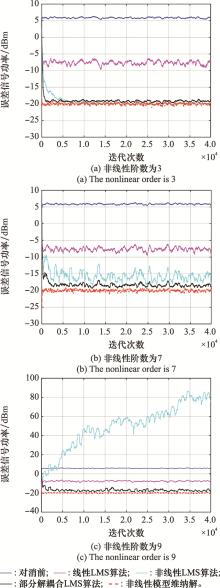
Fig.4
Error signal power of three algorithms with different nonlinear orders"
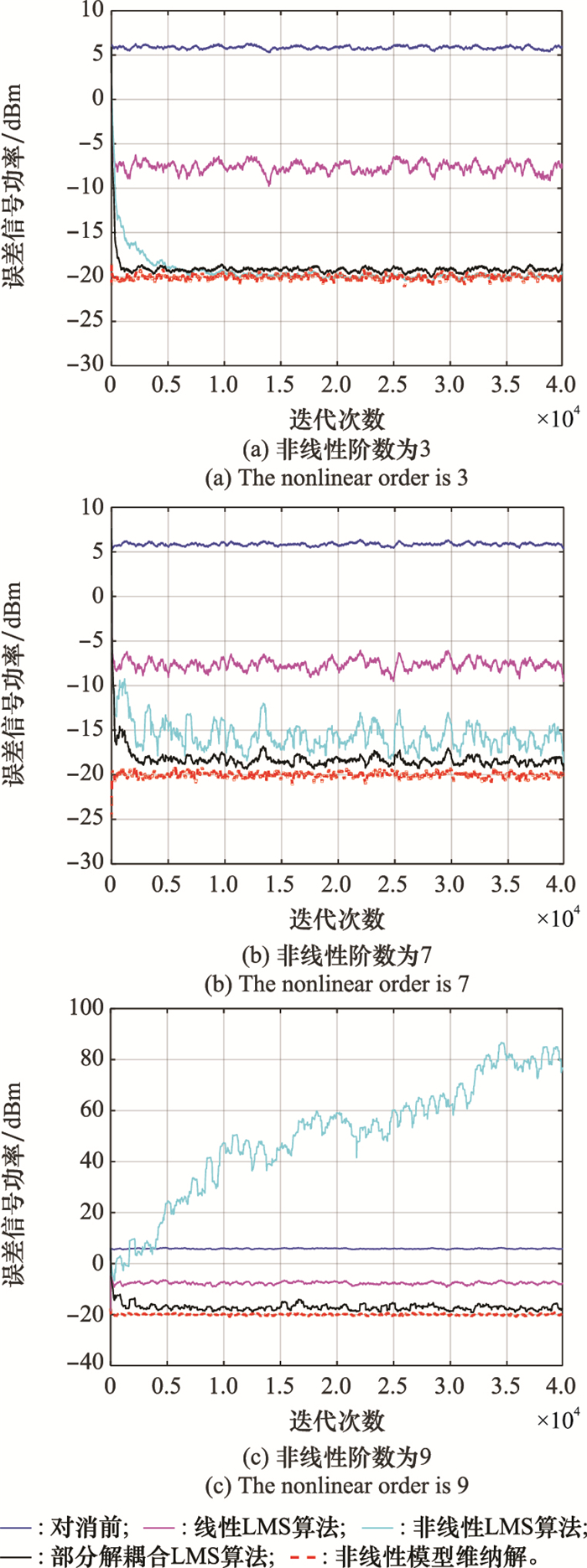
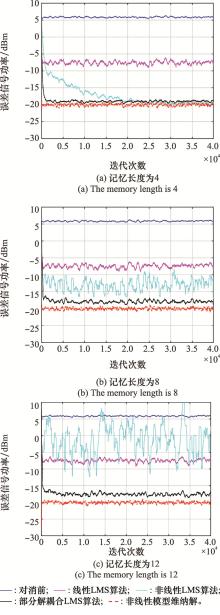
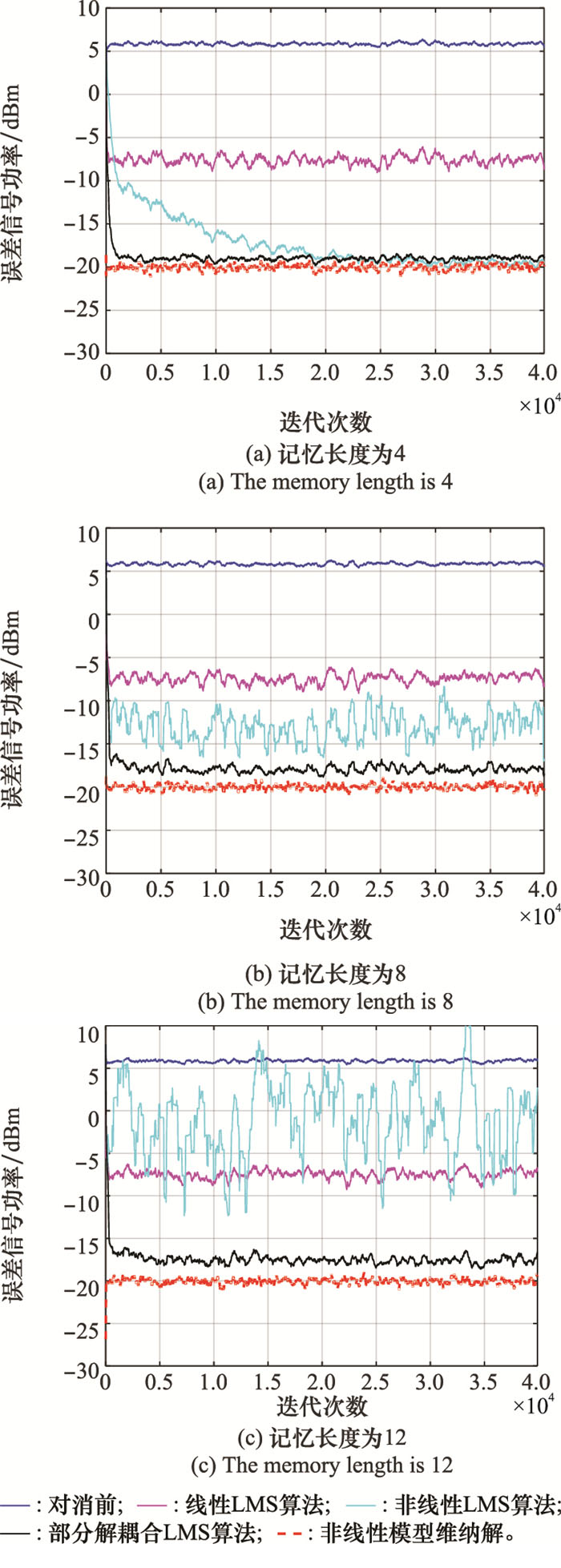
Fig.5
Error signal power of three algorithms with different memory length"
| 1 |
HE Y , ZHAO M Y , GUO W B . Performance analysis of nonlinear self-interference cancellation with timing error in full-duplex systems[J]. IEEE Wireless Communications Letters, 2021, 10 (5): 1075- 1078.
doi: 10.1109/LWC.2021.3057893 |
| 2 |
KENNETH E K , BRADLEY T P , JEFFREY S H . In-band full-duplex technology: techniques and systems survey[J]. IEEE Trans.on Microwave Theory and Technology, 2019, 67 (7): 3025- 3041.
doi: 10.1109/TMTT.2019.2896561 |
| 3 | SABHARWAL A , SCHNITER P . In-band full-duplex wireless: challenges and opportunities[J]. IEEE Journal on Selected Areas in Communications, 2014, 32 (5): 1637- 1652. |
| 4 |
LI D M , CHENG J L , VICTOR C M . Adaptive spectrum sharing for half-duplex and full-duplex cognitive radios: from the energy efficiency perspective[J]. IEEE Trans.on Communication, 2018, 66 (11): 5067- 5080.
doi: 10.1109/TCOMM.2018.2843768 |
| 5 |
TONG Z , MARTIN H . Throughput analysis for full-duplex wireless networks with imperfect self-interference cancellation[J]. IEEE Trans.on Communication, 2015, 63 (11): 4490- 4500.
doi: 10.1109/TCOMM.2015.2465903 |
| 6 |
LI Z , XIA Y L , PEI W J , et al. An augmented nonlinear LMS for digital self-interference cancellation in full-duplex direct-conversion transceivers[J]. IEEE Trans.on Signal Processing, 2018, 66 (15): 4065- 4078.
doi: 10.1109/TSP.2018.2846250 |
| 7 |
GE S H , XING J L , LIU Y C , et al. Dual-stage co-site RF interference canceller for wideband direct-conversion receivers using reduced observation chain[J]. IEEE Trans.on Electromagnetic Compatibility, 2020, 62 (3): 923- 932.
doi: 10.1109/TEMC.2019.2914369 |
| 8 |
DONGKYU K , HAESOON L , DAESIK H . A survey of in-band full-duplex transmission: from the perspective of PHY and MAC layers[J]. IEEE Communication Survey, 2015, 17 (4): 2017- 2046.
doi: 10.1109/COMST.2015.2403614 |
| 9 |
EVERETT E , SAHAI A , SABHARWAL A . Passive self-interference suppression for full-duplex infrastructure nodes[J]. IEEE Trans.on Wireless Communications, 2014, 13 (2): 680- 694.
doi: 10.1109/TWC.2013.010214.130226 |
| 10 |
ADNAN A , PARAG K . Protocol design for enabling full-duplex operation in next generation IEEE 802.11 WLANs[J]. IEEE System Journals, 2018, 12 (4): 3438- 3449.
doi: 10.1109/JSYST.2017.2720462 |
| 11 | KRIER J, RAND I, AKYILDIZ F. Active self-interference cancellation of passband signal using gradient descent[C]//Proc. of the IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications, 2013: 1212-1216. |
| 12 |
KAZUKI K , YUICHI M , HIDEYUKI U . Iterative nonlinear self-interference cncellation for in-band full-duplex wireless communications under mixer imbalance and amplifier nonlinearity[J]. IEEE Trans.on Wireless Communications, 2020, 19 (7): 4424- 4438.
doi: 10.1109/TWC.2020.2983407 |
| 13 | CUI Z P , GE S H , LI Y X , et al. Adaptive two-dimensional orthogonalization scheme for non-linear digital canceller in full-duplex radios[J]. Electronics Letters, 2021, 58 (6): 240- 242. |
| 14 |
VOGT H , ENZNER G , SEZGIN A . State-space adaptive nonlinear self-interference cancellation for full-duplex communication[J]. IEEE Trans.on Signal Processing, 2019, 67 (11): 2810- 2825.
doi: 10.1109/TSP.2019.2910490 |
| 15 |
AHMED E , ELTAWIL A . All-digital self-interference cancellation technique for full-duplex systems[J]. IEEE Trans.on Wireless Communications, 2015, 14 (7): 3519- 3532.
doi: 10.1109/TWC.2015.2407876 |
| 16 | LAURI A, DANI K, VILLE S, et al. Cancellation of power amplifier induced nonlinear self-interference in full-duplex transceivers[C]//Proc. of the Asilomar Conference on Signals, Systems and Computers, 2013: 1193-1198. |
| 17 |
DING L , ZHOU G T , DENNIS R M , et al. A robust digital baseband predistorter constructed using memory polynomials[J]. IEEE Trans.on Communications, 2004, 52 (1): 159- 165.
doi: 10.1109/TCOMM.2003.822188 |
| 18 |
MAHMOUD A , LAURI A , CHANCE T , et al. Low-complexity subband digital predistortion for spurious emission suppression in noncomtiguous spectrum access[J]. IEEE Trans.on Microwave Theory and Technology, 2016, 64 (11): 3501- 3517.
doi: 10.1109/TMTT.2016.2602208 |
| 19 |
KAZUKI K , YUICHI M , HIDEYUKI U . Theoretical analysis of in-band full-duplex radios with parallel Hammerstein self-interference cancellers[J]. IEEE Trans.on Wireless Communications, 2021, 20 (10): 6772- 6786.
doi: 10.1109/TWC.2021.3076496 |
| 20 | LIU D, CHA H, WANG B B. A novel variable step length LMS algorithm based on arctangent compound function[C]//Proc. of the IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference, 2021: 1691-1696. |
| 21 | ASHRAF A M, MOSTAFA M I, HESHAM F A. Performance study of adaptive filtering and noise cancellation of artifacts in ECG signals[C]//Proc. of the 17th International Conference on Advanced Communication Technology, 2015: 394-401. |
| 22 | SURYAIA R, MAMUNUR R, ZAHANGIR A. A unified analysis of the proposed wavelet transform domain LMS-algorithm for ARMA process[C]//Proc. of the 5th International Conference on Advances in Electrical Engineering, 2019: 195-200. |
| 23 | OZEN A, SOYSAL B, KAYA I. A fuzzy logic based channel estimation in Walsh-Hadamard transform employed OFDM systems[C]//Proc. of the IEEE 15th Signal Processing and Communications Applications, 2007. |
| 24 | GE S, CUI Z P, XING J L. Adaptive nonlinear digital interference cancellation with two dimensional orthogonalization for co-site radios[C]//Proc. of the IEEE MTT-S International Wireless Symposium, 2021. |
| 25 | LI Z, PEI W J, XIA Y L. Widely linear CLMS based cancellation of nonlinear self-interfereence in full-duplex direct-conversion transceivers[C]//Proc. of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2018: 4329-4333. |
| 26 |
LI Z , XIA Y L , PEI W J . An augmented nonlinear LMS for digital self-interference cancellation in full-duplex direct-conversion transceivers[J]. IEEE Trans.on Signal Processing, 2018, 66 (15): 4065- 4078.
doi: 10.1109/TSP.2018.2846250 |
| 27 | KORPI D, CHOI Y. Adaptive nonlinear digital self-interference cancellation for mobile inband full-duplex radio: algorithms and RF measurements[C]//Proc. of the IEEE Global Communication Conference, 2015. |
| 28 |
GRIFFITH D W , ARCE G R . Partially decoupled Volterra filters: formulation and LMS adaption[J]. IEEE Trans.on Signal Processing, 1997, 45 (6): 1485- 1494.
doi: 10.1109/78.599973 |
| 29 | ZOU Y X, CHAN S C, SANG T S. Transform domain adaptive Volterra filter algorithm based on constrained optimization[C]//Proc. of the IEEE International Symposium on Circuits and Systems, 1999: 219-222. |
| 30 |
GRIFFITH D W , ARCE G R . A partially decoupled RLS algorithm for Volterra filters[J]. IEEE Trans.on Signal Processing, 1999, 47 (2): 579- 582.
doi: 10.1109/78.740147 |
| 31 |
LIU Y , QUAN X , PAN W S . Digital assisted analog interference cancellation for in-band full-duplex radios[J]. IEEE Communication Letters, 2017, 21 (5): 1079- 1082.
doi: 10.1109/LCOMM.2017.2652444 |
| [1] | Zhongyi CAI, Zezhou WANG, Xiaofeng ZHANG, Yan LI. Online prediction method of remaining useful lifetime for implicit nonlinear degradation equipment [J]. Systems Engineering and Electronics, 2020, 42(6): 1410-1416. |
| [2] | LI Gongquan, LAI Tao, JIN Ke, ZHAO Yongjun. Nonlinearity phase estimation and correction of FMCW radar [J]. Systems Engineering and Electronics, 2018, 40(3): 538-545. |
| [3] | LI Fei, HU Jianbo, WANG Jianhao, WANG Tao. Adaptive Backstepping sliding mode control for a class of uncertain nonlinear systems with input constraints [J]. Systems Engineering and Electronics, 2017, 39(8): 1823-1833. |
| [4] | LU Xiaodong, ZHAO Hui, ZHAO Bin, ZHOU Jun. Novel backstepping attitude control method for interception missile based on disturbance compensation [J]. Systems Engineering and Electronics, 2017, 39(5): 1100-1106. |
| [5] | LIU Zongcheng, CHEN Yong, DONG Xinmin, XUE Jianping, CHENG Jianfeng, WANG Zutong. Adaptive tracking control of multi-effector aircraft with actuator nonlinearity [J]. Systems Engineering and Electronics, 2017, 39(2): 383-390. |
| [6] | ZENG Le-ya, XU Hua, WANG Tian-rui. Low computational complexity variable step-size CLMS algorithm based on Lorentzian function [J]. Systems Engineering and Electronics, 2016, 38(5): 998-. |
| [7] | ZHANG Yong-gang, CHENG Ran, HUANG Yu-long, LI Ning. Truncated adaptive cubature particle filter [J]. Systems Engineering and Electronics, 2016, 38(2): 382-391. |
| [8] | LI Fei, HU Jian-bo, WANG Jian-hao, GAO Peng. Backstepping global sliding mode control for flight attitude tracking control system with hysteretic nonlinearity [J]. Systems Engineering and Electronics, 2015, 37(9): 2115-2122. |
| [9] | NING Xiao-ling, ZHANG Lin-sen, LIU Zhi-kun. Variable step size LMS equalization algorithm based on adaptive mixed power parameter in underwater acoustic channels [J]. Systems Engineering and Electronics, 2015, 37(9): 2141-2147. |
| [10] | SU Rui, WANG Bin, LIU Shigang. Algorithm of memory effect and nonlinearity judgment for#br# Hammerstein channel [J]. Systems Engineering and Electronics, 2015, 37(10): 2383-2390. |
| [11] | LIU Zong-cheng, DONG Xin-min, XUE Jian-ping, ZHANG Li-peng. Adaptive control for a class of nonlinear systems with uncertain actuator nonlinearity [J]. Systems Engineering and Electronics, 2015, 37(1): 163-168. |
| [12] | WANG Yue, JIANG Bin, LU Ning-yun. Hybrid modeling strategy based on physical effect analysis and nonlinearity measure [J]. Systems Engineering and Electronics, 2014, 36(6): 1137-1145. |
| [13] | WANG Wei, ZHAO Qing, WANG Ben, SUI Jun jie. Robust adaptive control for MEMS triaxial gyroscopewith sector input nonlinearities [J]. Systems Engineering and Electronics, 2014, 36(12): 2504-2509. |
| [14] | CHEN Hui, WANG Xin-lin, LIU Bin, LI Hai-bin. Partially decoupled volterra equalizer for digital satellite channels [J]. Journal of Systems Engineering and Electronics, 2013, 35(4): 847-851. |
| [15] | TIAN Fuqing, LUO Rong, LI Keyu, DING Qingxi. New variable step size LMS algorithm based on modified hyperbolic tangent function [J]. Journal of Systems Engineering and Electronics, 2012, 34(9): 1758-1763. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||