Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (12): 4005-4011.doi: 10.12305/j.issn.1001-506X.2025.12.01
• Electronic Technology • Previous Articles
UAV target track correlation based on GCN
Wenzhong ZHANG, Changbo HOU, Pengqi ZHAO, Sicheng LIU
- School of Information and Communication Engineering,Harbin Engineering University,Harbin 150001,China
-
Received:2024-09-03Revised:2024-11-26Online:2025-03-13Published:2025-03-13 -
Contact:Changbo HOU
CLC Number:
Cite this article
Wenzhong ZHANG, Changbo HOU, Pengqi ZHAO, Sicheng LIU. UAV target track correlation based on GCN[J]. Systems Engineering and Electronics, 2025, 47(12): 4005-4011.
share this article
Fig.1
Flow block diagram"
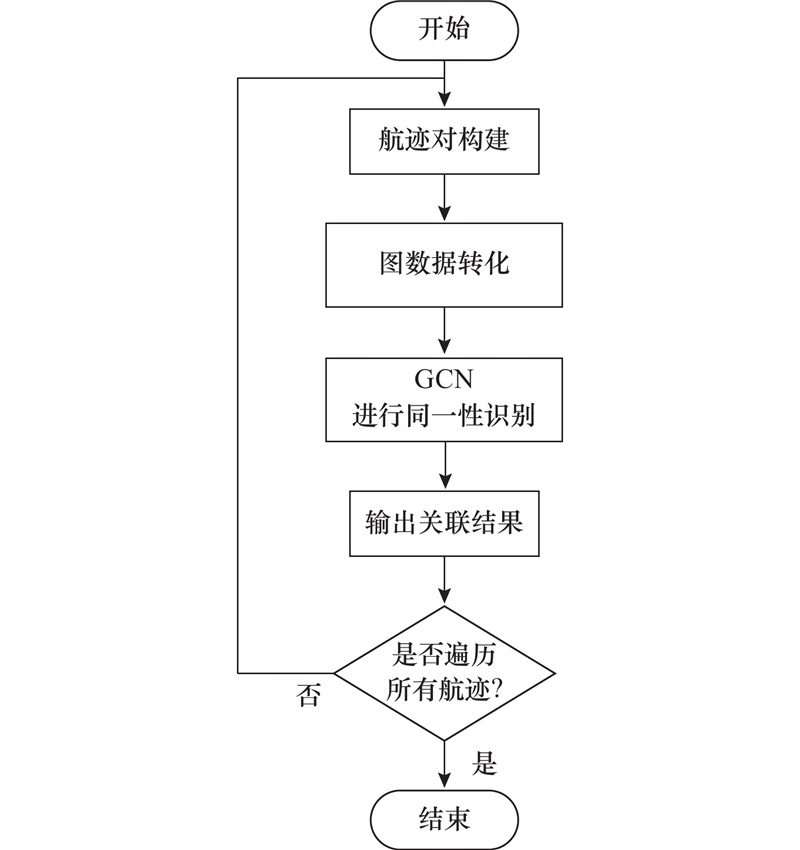

Fig.2
GCN model based on unmanned aerial vehicle target track"
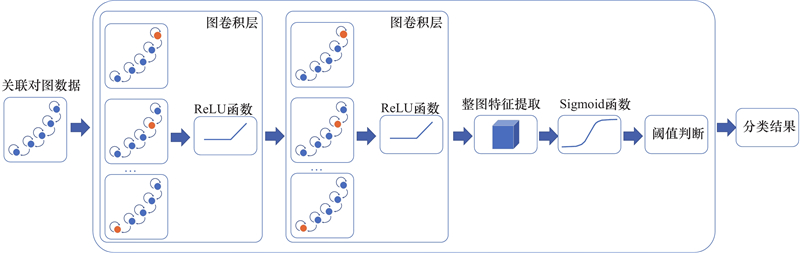
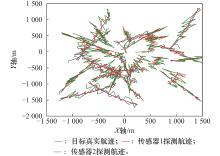
Fig.3
Unmanned aerial vehicle tracks detected by sensors"
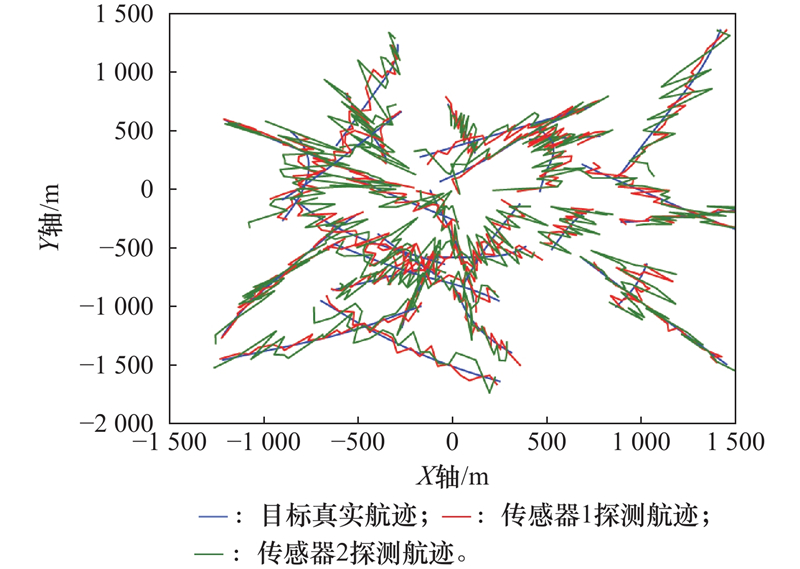
Table 1
Accuracy of different network layers"
| 序号 | 网络层数 | 关联准确率/% |
| 1 | 1 | 92.57 |
| 2 | 2 | 98.86 |
| 3 | 3 | 96.29 |
| 4 | 4 | 94.71 |
Table 2
Correlation accuracy of different hidden layer dimensions"
| 序号 | 隐藏层维度 | 关联准确率/% |
| 1 | 2 | 94.21 |
| 2 | 4 | 95.71 |
| 3 | 8 | 98.86 |
| 4 | 16 | 95.86 |
| 5 | 64 | 95.29 |
Fig.4
Network loss and accuracy curve"
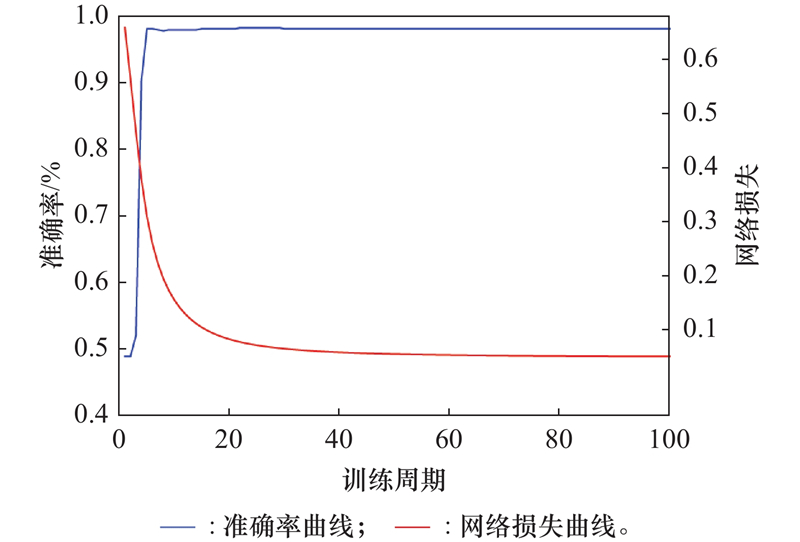
Table 3
Accuracy of track correlation algorithms"
| 序号 | 航迹关联算法 | 关联准确率/% |
| 1 | 加权法 | 76.11 |
| 2 | 修正法 | 68.30 |
| 3 | 最近邻法 | 57.67 |
| 4 | CNN | 80.34 |
| 5 | LSTM | 84.67 |
| 6 | GCN | 98.86 |
| 1 |
FANG Z X, SAVKIN V A. Strategies for optimized UAV surveillance in various tasks and scenarios: a review[J]. Drones, 2024, 8 (5): 193.
doi: 10.3390/drones8050193 |
| 2 |
NGUYEN D D, DANG D Q. Development of an intelligent drone management system for integration into smart city transportation networks[J]. Drones, 2024, 8 (9): 512.
doi: 10.3390/drones8090512 |
| 3 | KANYUCKA J, SINGER R A. Correlation of multiple site track data[J]. IEEE Trans. on Aerospace and Electronic Systems, 1970, AES-6(2): 180−187. |
| 4 | 李寅龙, 张天舒. 多传感器航迹关联算法综述[J]. 舰船电子工程, 2021, 41 (8): 44- 50. |
| LI Y L, ZHANG T S. Summary of multi sensor track correlation algorithms[J]. Ship Electronic Engineering, 2021, 41 (8): 44- 50. | |
| 5 | BAR-SHALOM Y, FORTMAN T E. Tracking and data association[J]. The Journal of the Acoustical Society of America, 1990, 87(2). DOI: 10.1121/1.398863. |
| 6 |
AZIZ M A. Fuzzy track-to-track association and track fusion approach in distributed multi sensor multitarget multiple attribute environment[J]. Signal Processing, 2007, 87 (6): 1474- 1492.
doi: 10.1016/j.sigpro.2007.01.001 |
| 7 | 孙志军, 薛磊, 许阳明, 等. 深度学习研究综述[J]. 计算机应用研究, 2012, 29 (8): 2806- 2810. |
| SUN Z J, XUE L, XU Y M, et al. Overview of deep learning[J]. Application Research of Computers, 2012, 29 (8): 2806- 2810. | |
| 8 |
ZHANG S, TONG H H, XU J J, et al. Graph convolutional networks: a comprehensive review[J]. Computational Social Networks, 2019, 6 (1): 11.
doi: 10.1186/s40649-019-0069-y |
| 9 |
SINGER R A, KANYUCK A J. Computer control of multiple site track correlation[J]. Automatic, 1971, 7 (4): 455- 463.
doi: 10.1016/0005-1098(71)90096-3 |
| 10 |
BAR-SHALOM Y. On the track-to-track correlation problem[J]. IEEE Trans. on Automatic Control, 1981, 26 (2): 571- 572.
doi: 10.1109/TAC.1981.1102635 |
| 11 | 何友, 谭庆海. 多传感器综合系统中的航迹相关算法[J]. 火力与指挥控制, 1989, 14 (1): 1- 12. |
| HE Y, TAN Q H. Track correlation algorithm in multi-sensor integrated system[J]. Fire Control & Command Control, 1989, 14 (1): 1- 12. | |
| 12 |
GUAN J, HE Y, PENG Y N. Distributed CFAR detector based on local test statistic[J]. Signal Processing, 2000, 80 (2): 373- 379.
doi: 10.1016/S0165-1684(99)00136-X |
| 13 | 李恒璐, 陈伯孝, 丁一, 等. 基于信息熵权的最近邻域数据关联算法[J]. 系统工程与电子技术, 2020, 42 (4): 806- 812. |
| LI H L, DING B X, DING Y, et al. Nearest neighbor data association algorithm based on information entropy weight[J]. Systems Engineering and Electronics, 2020, 42 (4): 806- 812. | |
| 14 |
GUAN X, HE Y, YI X. Gray track-to-track correlation algorithm for distributed multitarget tracking system[J]. Signal Processing, 2006, 86 (11): 3448- 3455.
doi: 10.1016/j.sigpro.2006.03.001 |
| 15 | YEN J. Generalizing the Dempster-Shafer theory to fuzzy sets[J]. Studies in Fuzziness & Soft Computing, 2013, 20 (3): 559- 570. |
| 16 | 衣晓, 关欣, 何友. 分布式多目标跟踪系统的灰色航迹关联模型[J]. 信号处理, 2005, 21 (6): 653- 655,662. |
| YI X, GUAN X, HE Y. Grey track correlation model for distributed multitarget tracking system[J]. Journal of Signal Processing, 2005, 21 (6): 653- 655,662. | |
| 17 | 衣晓, 周威. 基于区域覆盖度的航迹灰关联算法[J]. 火力与指挥控制, 2020, 45 (5): 45- 50. |
| YI X, ZHOU W. Track grey correlation algorithm based on regional coverage[J]. Fire Control & Command Control, 2020, 45 (5): 45- 50. | |
| 18 | 高峰, 谢小平, 熊伟. 基于广义绝对灰关联度的航迹关联算法[J]. 雷达科学与技术, 2016, 14 (6): 642- 647. |
| GAO F, XIE X P, XIONG W. Track correlation algorithm based on generalized absolute grey association degree[J]. Radar Science and Technology, 2016, 14 (6): 642- 647. | |
| 19 | 张池平, 王晓明, 崔祜涛. D-S证据理论在航迹关联问题中的应用[J]. 传感器技术, 2005, 24 (8): 71- 73. |
| ZHANG C P, WANG X M, CUI G T. Application of D-S evidence theory in track to track correlation problem[J]. Transducer and Microsystem Technologies, 2005, 24 (8): 71- 73. | |
| 20 | 杨军佳, 时银水, 王学青. 基于区间数及DS证据理论的多传感器航迹关联方法[J]. 电光与控制, 2019, 26 (5): 64- 67. |
| YANG J J, SHI Y S, WANG X Q. A multi-sensor track association method based on interval number and DS evidence theory[J]. Electronics Optics & Control, 2019, 26 (5): 64- 67. | |
| 21 | GAO J, LI P, CHEN Z K, et al. A survey on deep learning for multimodal data fusion[J]. Neural Computation, 2020, 32 (5): 31- 36. |
| 22 | KIM K T. Focusing of high range resolution profiles of moving targets using stepped frequency waveforms[J]. IET Radar, Sonar & Navigation, 2010, 4(4): 564−575. |
| 23 | 周飞燕, 金林鹏, 董军. 卷积神经网络研究综述[J]. 计算机学报, 2017, 40 (6): 1229- 1251. |
| ZHOU F Y, JIN L P, DONG J. Review of convolutional neural network[J]. Chinese Journal of Computers, 2017, 40 (6): 1229- 1251. | |
| 24 | 黄虹玮, 刘玉娇, 沈卓恺, 等. 基于深度学习网络模型的端到端航迹关联[J]. 计算机科学, 2020, 47 (3): 201- 205. |
| HUANG H W, LIU Y J, SHEN Z K, et al. End to end track association based on deep learning network model[J]. Computer Science, 2020, 47 (3): 201- 205. | |
| 25 |
HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9 (8): 1735- 1780.
doi: 10.1162/neco.1997.9.8.1735 |
| 26 |
LI H, XIONG X R, LIU C X, et al. SFFNet: staged feature fusion network of connecting convolutional neural networks and graph convolutional neural networks for hyperspectral image classification[J]. Applied Sciences, 2024, 14 (6): 2327.
doi: 10.3390/app14062327 |
| 27 | GORI M, MONFARDINI G, SCARSELLI F. A new model for learning in graph domains[C]//Proc. of the IEEE International Joint Conference on Neural Networks, 2005: 729−734. |
| 28 | YANG M L, ZHOU M, ZHANG T, et al. Hyperbolic graph neural networks: a review of methods and applications[EB/OL]. [2024-08-15]. https://arxiv.org/abs/2202.13852. |
| 29 |
ZHANG Z W, CUI P, ZHU W W. Deep learning on graphs: a survey[J]. IEEE Trans. on Knowledge and Data Engineering, 2022, 34 (1): 249- 270.
doi: 10.1109/TKDE.2020.2981333 |
| 30 | 赵翻东, 蔡益朝, 李浩. 基于GRNN神经网络的多目标航迹关联[J]. 信息系统工程, 2021 (7): 135- 136,140. |
| ZHAO F D, CAI Y Z, LI H. Multi target track correlation based on GRNN neural network[J]. China CIO News, 2021 (7): 135- 136,140. |
| [1] | Kaiming LI, Yuanpeng ZHANG, Ying LUO, Xiaonan DAI. Research progress on radar target recognition of ballistic missile [J]. Systems Engineering and Electronics, 2025, 47(9): 2870-2889. |
| [2] | Ce JI, Xiangyu MA, Xiaoyu MU, Jiayi ZHAO. TS-GRU-VTA: vehicle channel estimation scheme based on deep learning [J]. Systems Engineering and Electronics, 2025, 47(9): 3093-3098. |
| [3] | Xiaowei YAN, Chong LING, Shengbin SHI. Design and implementation of a rapid detection system for surface unexploded submunitions [J]. Systems Engineering and Electronics, 2025, 47(8): 2639-2645. |
| [4] | Chunyu LI, Hubing XIN, Yanqin SONG. A distributed multi-station real-time track processing method for space launch mission [J]. Systems Engineering and Electronics, 2025, 47(7): 2185-2193. |
| [5] | Wanying ZHANG, Youbing GAO, Zeyi LI, Pengfei LI, Wei ZHANG. Background signal suppression algorithm based on dual-path feature fusion net [J]. Systems Engineering and Electronics, 2025, 47(7): 2406-2413. |
| [6] | Xinzheng ZHANG, Mengke YAN, Xiaolin ZHU. Noise pseudo-label tolerant semi-supervised SAR target recognition [J]. Systems Engineering and Electronics, 2025, 47(6): 1796-1805. |
| [7] | Zhijie JIANG, Heng SONG, Nan HU, Lanxi DUAN, Ping CAO. Target recognition and classification algorithm of MMW radar in tunnel [J]. Systems Engineering and Electronics, 2025, 47(5): 1453-1460. |
| [8] | Qianqi NIE, Minghui SHA, Yingshen ZHU, Chongyu WANG, Nianqiang CUI. Radar multi-component signal recognition method based on blind source separation combined with singular spectrum analysis [J]. Systems Engineering and Electronics, 2025, 47(4): 1168-1175. |
| [9] | Lei YUAN, Yanjuan YANG, Yi GUO, Peng DAI. Deep learning-based semi-blind identification algorithm for code rates of LDPC codes with correlated noise [J]. Systems Engineering and Electronics, 2025, 47(4): 1335-1345. |
| [10] | Chenhui PAN, Yong XIAN, Peiyang MA, Wancheng NI, Xiaonan ZHAO, Shaopeng LI. Situation mathematical expression method of situational awareness in wargame [J]. Systems Engineering and Electronics, 2025, 47(3): 883-892. |
| [11] | Jiajun LIU, Zukun LU, Wei XIAO, Zongnan LI, Zhe LIU. Review of nonlinear distortion modeling in RF front end of satellite navigation receivers [J]. Systems Engineering and Electronics, 2025, 47(3): 938-950. |
| [12] | Xiarun SHEN, Ruonan LI, Haotian ZHANG. Server KPI anomaly detection based on CVAE-LSTM [J]. Systems Engineering and Electronics, 2025, 47(3): 1019-1027. |
| [13] | Xiaolin LIU, Mengjiao GUO, Zhuo LI. Adaptive graph convolutional recurrent network prediction method for flight delay based on Dueling DQN optimization [J]. Systems Engineering and Electronics, 2025, 47(2): 568-579. |
| [14] | Weihong FU, Xinyu ZHANG, Naian LIU. Single-channel blind source separation algorithm for co-frequency and co-modulation based on multi-scale fusion neural network [J]. Systems Engineering and Electronics, 2025, 47(2): 641-649. |
| [15] | Jie JIANG, Wenjun YAN, Qing LING, Limin ZHANG. Tiny objects detection method for unmanned aerial vehicle ship images based on STOD [J]. Systems Engineering and Electronics, 2025, 47(11): 3559-3567. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||