Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (3): 929-937.doi: 10.12305/j.issn.1001-506X.2025.03.25
• Guidance, Navigation and Control • Previous Articles
Follow-up control technology and experiment research of suspension gravity compensation system
Xu WANG1, Yanfang LIU1,2,*, Jiayu SHE1, Qiufan YUAN3, Naiming QI1,2
- 1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
2. Suzhou Research Institute, Harbin Institute of Technology, Suzhou 215104, China
3. Aerospace System Engineering Shanghai, Shanghai 201109, China
-
Received:2024-04-22Online:2025-03-28Published:2025-04-18 -
Contact:Yanfang LIU
CLC Number:
Cite this article
Xu WANG, Yanfang LIU, Jiayu SHE, Qiufan YUAN, Naiming QI. Follow-up control technology and experiment research of suspension gravity compensation system[J]. Systems Engineering and Electronics, 2025, 47(3): 929-937.
share this article

Fig.1
System composition"


Fig.2
Composition of follow-up subsystems"
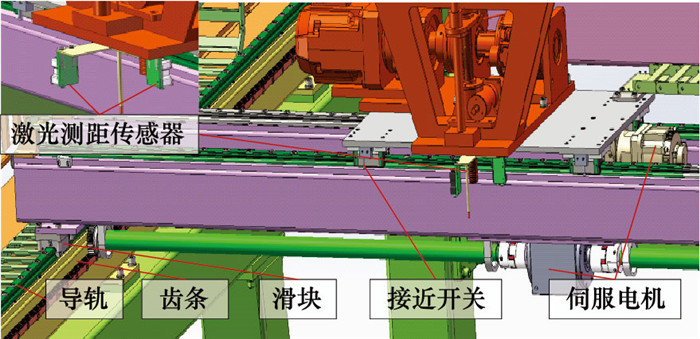

Fig.3
Electrical connection topology diagram"
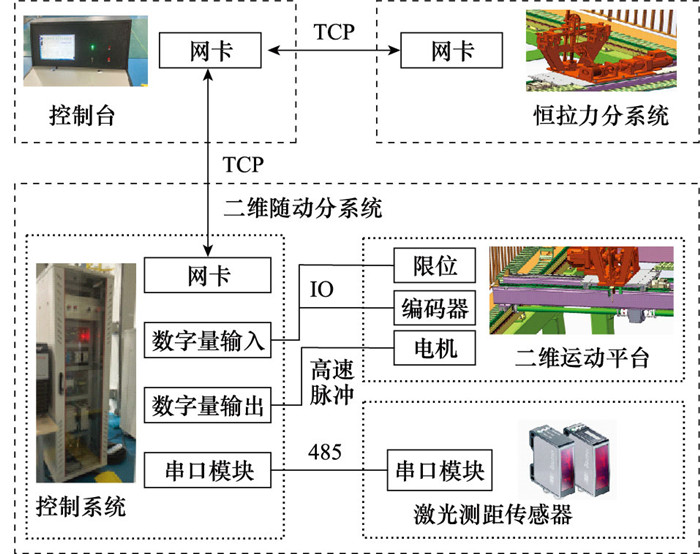

Fig.4
Control logic of follow-up subsystem"


Fig.5
Simplified model and measurement principle of follow-up subsystem"

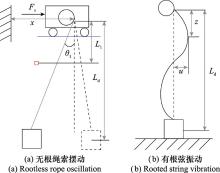
Fig.6
Rootless rope oscillation and rooted string vibration"

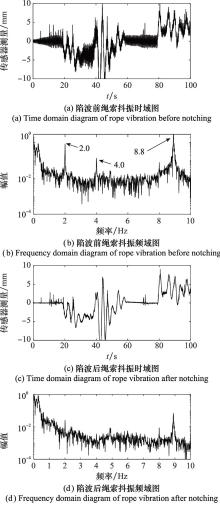
Fig.7
Comparison before and after notching"

Table 1
Parameter settings for notch filters"
| 参数 | 陷波频率/Hz | ||
| 2 | 4 | 8.8 | |
| a1 | 4.078 1 | 4.260 3 | 4.739 2 |
| a2 | 0.031 6 | 0.126 2 | 0.610 8 |
| a3 | 2.953 5 | 3.865 9 | 3.871 6 |
| b1 | 4.020 8 | 4.073 1 | 4.327 5 |
| b2 | -7.968 4 | -7.873 8 | -7.389 2 |
| b3 | 4.010 8 | 4.053 1 | 4.283 3 |

Fig.8
System closed-loop control block diagram"
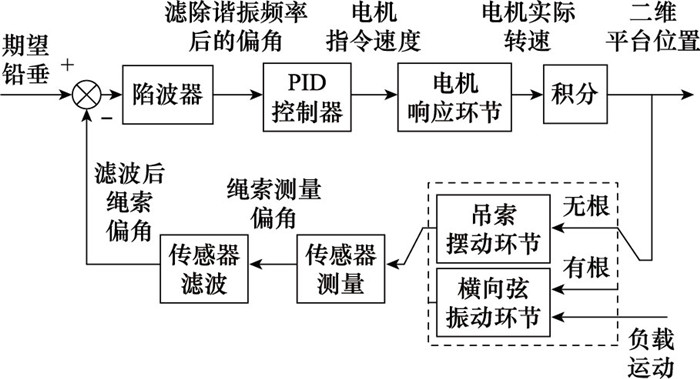
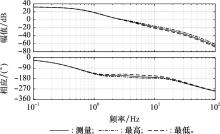
Fig.9
System open-loop frequency spectrum characteristic curve"


Fig.10
Simulation results of human motion follow-up"


Fig.11
Walking speed and sling deviation under different working conditions"


Fig.12
Position of continuous jumping working condition tester"
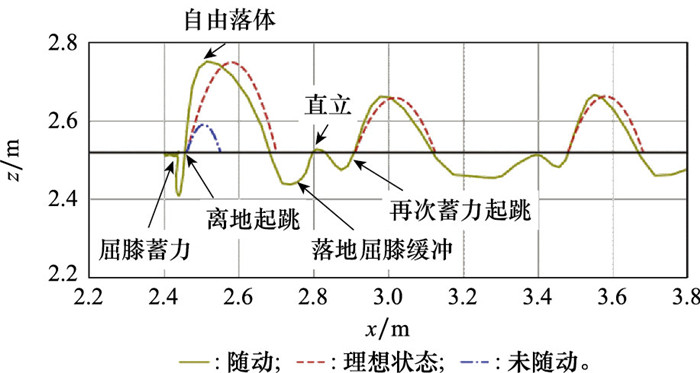

Fig.13
Speed and error of testers under working conditions such as squatting and standing"

Table 2
System follow-up effect of subjects under different exercise working conditions"
| 工况 | 最大速度/(m/s) | 平均误差(1σ)/(°) | 最大误差/(°) | |||||
| X | Y | X | Y | X | Y | |||
| 下蹲站立 | 0.33 | 0.36 | 0.23 | 0.22 | 0.37 | 0.35 | ||
| 快速行走 | 2.02 | 0.34 | 0.43 | 0.38 | 1.35 | 0.92 | ||
| 跳跃行走 | 0.52 | 0.47 | 0.34 | 0.19 | 0.51 | 0.43 | ||
Table 3
Horizontal position tracking accuracy of different systems"
| 指标 | 文献[ | 文献[ | ARGOS[ | 本文 |
| 最大跟随速度/(m/s) | 0.10 | 0.10 | 2.00 | 2.02 |
| 跟踪最高速时绳索偏角/(°) | - | - | 3.10 | 1.4 |
| 跟踪0.1 m/s速度绳索倾角/(°) | 0.20 | 0.15 | - | 0.14 |
| 1 |
LI W J , CHENG D Y , LIU X G , et al. On-orbit service (OOS) of spacecraft: a review of engineering developments[J]. Progress in Aerospace Sciences, 2019, 108, 32- 120.
doi: 10.1016/j.paerosci.2019.01.004 |
| 2 |
YANG G , JI J , WEI Y H X . A collision-free visual servoing method for two space manipulators capturing tumbling satellites[J]. Proceedings of the Institution of Mechanical Engineers, Part C. Journal of Mechanical Engineering Science, 2024, 238 (6): 2251- 2266.
doi: 10.1177/09544062231190536 |
| 3 | GUDALL C, CABRIALES J, DUNBAR B J, et al. Finite element analysis (FEA) model of the Apollo A7LB extravehicular activity (EVA) suit sleeve[C]//Proc. of the IEEE Aerospace Conference, 2024. |
| 4 | HARVILL L, COWLEY M, RAJULU S. Human performance in simulated reduced gravity environments: JSCCN-32456[R]. Washington, D.C. : NASA, 2014. |
| 5 | HOFFMANN B. Human thermal analysis of traverse and geology tasks during simulated Lunar extravehicular activity[C]//Proc. of the IEEE Aerospace Conference, 2023. |
| 6 | ZHAO Z H, YIN Z, KANG Y, et al. The design and implementation of extravehicular experiments support system for manned spacecrafts[C]//Proc. of the 2nd International Symposium on Aerospace Engineering and Systems, 2023: 53-58. |
| 7 | STROMGREN C, LYNCH C, BURKE C, et al. Evaluating extravehicular activity access options for a Lunar surface habitat[C]//Proc. of the IEEE Aerospace Conference, 2023. |
| 8 |
CHEN C I , CHEN Y T , WU S C . Experiment and simulation in design of the board-level drop testing tower apparatus[J]. Experiment Techniques, 2012, 36 (2): 60- 69.
doi: 10.1111/j.1747-1567.2011.00755.x |
| 9 |
SAWADA H , UI K , MORI M . Micro-gravity experiment of a space robotic arm using parabolic flight[J]. Advanced Robotics, 2004, 18 (3): 247- 267.
doi: 10.1163/156855304322972431 |
| 10 | 姚燕生, 梅涛. 空间操作的地面模拟方法——水浮法[J]. 机械工程学报, 2008, 44 (3): 182- 188. |
| YAO Y S , MEI T . Simulation method of space operation on the ground-buoyancy method[J]. Journal of Mechanical Engineering, 2008, 44 (3): 182- 188. | |
| 11 | 刘延芳, 刘兴富, 齐乃明. 超低干扰力矩微纳卫星姿控半物理仿真平台[J]. 系统工程与电子技术, 2017, 39 (8): 1808- 1814. |
| LIU Y F , LIU X F , QI N M . Hardware-in-loop simulation platform with super-low disturbance torque for attitude control system of micro and nano-satellites[J]. Systems Engineering and Electronics, 2017, 39 (8): 1808- 1814. | |
| 12 | 高海波, 牛福亮, 刘振, 等. 悬吊式微低重力环境模拟技术研究现状与展望[J]. 航空学报, 2021, 42 (1): 80- 99. |
| GAO H B , NIU F L , LIU Z , et al. Suspended micro-low gravity environment simulation technology: status quo and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (1): 80- 99. | |
| 13 | XIU W W, RUBLE K, MA O. A reduced-gravity simulator for physically simulating human walking in microgravity or reduced-gravity environment[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2014: 4837-4843. |
| 14 | 宋天翔, 乔兵. 一种无源被动式人体低重力模拟系统的力学性能仿真分析[J]. 载人航天, 2023, 29 (5): 569- 580. |
| SONG T X , QIAO B . Kinematics simulation and analysis of a passive human body reduced-gravity simulation system[J]. Manned Spaceflight, 2023, 29 (5): 569- 580. | |
| 15 |
JIA J , JIA Y M , SUN S H . Preliminary design and development of an active suspension gravity compensation system for ground verification[J]. Mechanism and Machine Theory, 2018, 128, 492- 507.
doi: 10.1016/j.mechmachtheory.2018.06.018 |
| 16 |
HE J P , KRAM R , MCMACHON T A . Mechanics of sunning under simulated low gravity[J]. Journal of Applied Physiology, 1991, 71 (3): 863- 870.
doi: 10.1152/jappl.1991.71.3.863 |
| 17 | GRIFFIN T M , TOLANI N A , KRAM R . Walking in simulated reduced gravity: mechanical energy fluctuations and exchange[J]. Journal of Applied Physology, 1999, 86 (1): 383- 390. |
| 18 | LETKO W, SPADY A A. Walking in simulated lunnar gravity[C]// Proc. of the 4th Symposium on the Role of the Vestibular Organs in Space Exploration, 1970: 347-351. |
| 19 | PERUSEK G P, DEWITT J K, CAVANAGH P R. Zero-gravity locomotion simulators: New ground-based analogs for microgravity exercise simulation[EB/OL]. [2024-02-27]. https://ntrs.nasa.gov/citations/20080006841. |
| 20 | NORCROSS J R, CHAPPELL S P, CLLOWERS K G. Characterization of partial-gravity analog environments for extravehicular activity suit testing: NASA-TM-2020-216139[R]. Washington, D.C. : NASA, 2020. |
| 21 | 刘荣强, 郭宏伟, 邓宗全. 空间索杆铰接式伸展臂设计与试验研究[J]. 宇航学报, 2009, 30 (1): 315- 320. |
| LIU R Q , GUO H W , DENG Z Q . Space cable-strut deployable articutlated mast design and experiment study[J]. Journal of Astronauts, 2009, 30 (1): 315- 320. | |
| 22 |
YUAN F , CHEN D S , PAN C H , et al. Application of optimal-jerk trajectory planning in gait-balance training robot[J]. Chinese Journal of Mechanical Engineering, 2022, 35, 2.
doi: 10.1186/s10033-021-00665-1 |
| 23 |
KIM M G , CHO S , TRAN T Q . Scaled jump in gravity-reduced virtual environments[J]. IEEE Trans.on Visualization and Computer Graphics, 2017, 23 (4): 1360- 1368.
doi: 10.1109/TVCG.2017.2657139 |
| 24 |
YI W M , ZHENG Y , WANG W F , et al. Optimal design and force control of a nine-cable-driven parallel mechanism for lunar takeoff simulation[J]. Chinese Journal of Mechanical Engineering, 2019, 32, 73.
doi: 10.1186/s10033-019-0382-2 |
| 25 | HUAN S, DENG H. Research on gravity compensation technology for extravehicular activity training facilitiy[C]//Proc. of the 15th International Conference on Man-Machine-Environment System Engineering, 2015: 355-363. |
| 26 | 刘振, 高海波, 邓宗全. 星球车地面低重力模拟系统设计[J]. 机器人, 2013, 35 (6): 750- 756. |
| LIU Z , GAO H B , DENG Z Q . Design of the low gravity simulation system for planetary rovers[J]. Robot, 2013, 35 (6): 750- 756. | |
| 27 | VALLE P. Reduce gravity testing of robots (and humans) using active response gravity offload system: JSC-CN-40487[R]. Washington, D.C. : NASA, 2017. |
| 28 | SCHLOTMAN T E. A preliminary assessment of physical demand during simulated Lunar surface extravehicular activities[C]// Proc. of the IEEE Aerospace Conference, 2023. |
| 29 | YANG Z, SUN Y B, LEI Y Q, et al. Realization and experimental test of a body wright support unit for simultaneous position tracking and gravity offloading[C]// Proc. of IEEE the International Conference on Robotics and Biomimetics, 2016: 1064-1068. |
| 30 | 高扬. 悬吊法机水平随动控制系统设计[D]. 哈尔滨: 哈尔滨理工大学, 2017: 16-50. |
| GAO Y. Design of horizontal servo control system by suspension method[D]. Harbin: Harbin University of Science and Technology, 2017: 16-50. | |
| 31 | JIA J, JIA Y M, SUN S H. Adaptive sliding mode control for an active gravity offload system[C]//Proc. of the Chinese Intelligent Automation Conference, 2017: 461-569. |
| 32 |
SOPHIE O , JAMES C , JESSE R , et al. Effects of walking, running, and skipping under simulated reduced gravity using the NASA active response gravity offload system (ARGOS)[J]. Acta Astronautica, 2022, 197, 115- 125.
doi: 10.1016/j.actaastro.2022.05.014 |
| [1] | GUO Jian-guo1, CHEN Hui-juan1, ZHOU Jun1, JIANG Rui-min1, WANG Guo-qing2. Dynamics Modeling and characteristic analysis for vehicle with#br# asymmetric span morphing wing [J]. Systems Engineering and Electronics, 2016, 38(8): 1951-1957. |
| [2] | HUANG Xiang-dong, WANG Zhao-hua, LÜ Wei. Design of high-efficiency FRM notch filter with frequency point accurately controlled [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2320-2322,2454. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||