Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (2): 608-620.doi: 10.12305/j.issn.1001-506X.2025.02.27
• Guidance, Navigation and Control • Previous Articles
Semi-physical simulation verification of attitude control for compound unmanned helicopter
Bohai DENG, Jinfa XU
- National Key Laboratory of Rotorcraft Aeromechanics, Aviation College, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
-
Received:2023-10-30Online:2025-02-25Published:2025-03-18 -
Contact:Jinfa XU
CLC Number:
Cite this article
Bohai DENG, Jinfa XU. Semi-physical simulation verification of attitude control for compound unmanned helicopter[J]. Systems Engineering and Electronics, 2025, 47(2): 608-620.
share this article

Fig.1
Configuration diagram of CUH"

Table 1
Structural parameters of CUH"
| 参数 | 数值 | 参数 | 数值 | |
| 起飞重量/kg | 20 | 旋翼转速/rpm | 1 700 | |
| 螺旋桨半径/m | 0.2 | 旋翼半径/m | 0.75 | |
| 螺旋桨桨叶片数 | 3 | 旋翼桨桨叶片数 | 2 |
Table 2
Control strategies of CUH"
| 飞行模式 | 直升机 | 固定翼 |
| 航向通道 | 螺旋桨转速差动 | 螺旋桨转速差动 |
| 滚转通道 | 横向周期变距 | 副翼 |
| 俯仰通道 | 纵向周期变距 | 升降舵 |
| 垂向通道 | 旋翼总距 | 升降舵、旋翼总距 |
| 前向拉力 | 纵向周期变距 | 螺旋桨转速 |
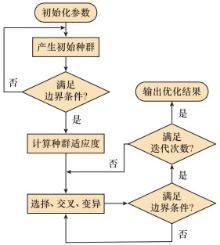
Fig.2
Optimization of operation weight coefficients at different speeds"
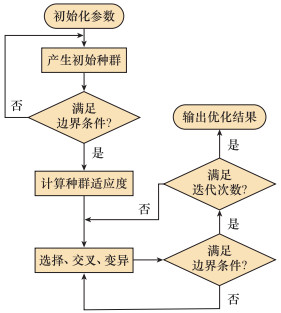

Fig.3
Variation principle of weight coefficient of the manipulated quantity"


Fig.4
Maneuvering response under different transition routes"
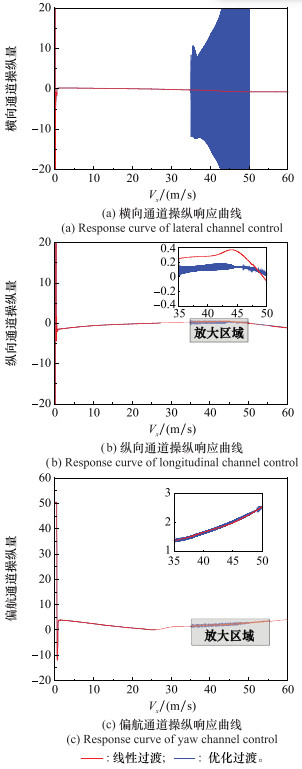

Fig.5
Attitude response under different transition routes"


Fig.6
Structure diagram of ADRC composition"


Fig.7
Structure diagram of LADRC control"
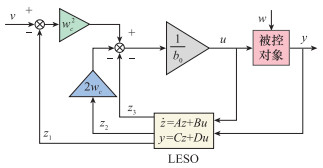

Fig.8
Composition structure diagram of semi-physical simulation system"
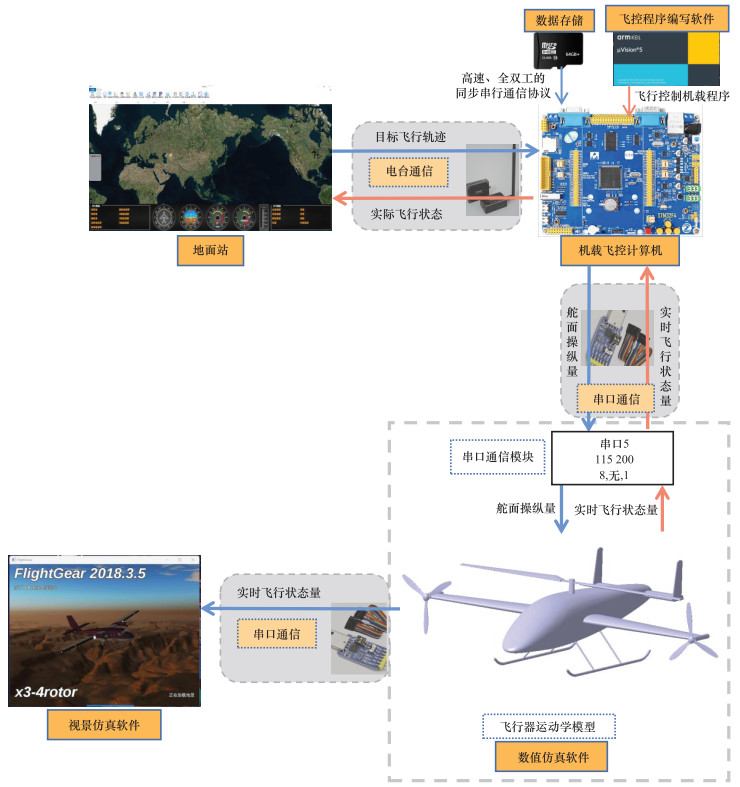
Table 3
Parameters of LADRC controller (°)"
| 控制器 | $\psi$ | ϕ | θ |
| wc | 3.8 | 3.5 | 3.6 |
| b0 | 35 | 20 | 30 |
| w0 | 5 | 2 | 3 |
Table 4
Parameters of PID controller"
| 控制器 | /(°) | ϕ/(°) | θ/(°) | $\psi$′/(rad/s) | ϕ′/(rad/s) | θ′/(rad/s) |
| kp | 208.3 | 120.2 | 34 | 0.035 | 0.02 | 0.03 |
| ki | 400 | 120.35 | 300.8 | 0 | 0 | 0 |
| kd | 10.5 | 1.25 | 0.1 | 0 | 0 | 0 |

Fig.9
Simulation results of attitude stability"


Fig.10
Simulation results of attitude interference performance"


Fig.11
Simulation results of attitude robustness"


Fig.12
Composition structure diagram of flight testing platform system"


Fig.13
Attitude angle and angular rate responses during flight test"

| 1 | YAN K , WU Q X . Adaptive tracking flight control for unmanned autonomous helicopter with full state constraints and actuator faults[J]. ISA Transactions, 2022, 128, 32- 46. |
| 2 |
MA H X , CHEN M , FENG G , et al. Disturbance-observer-based adaptive fuzzy tracking control for unmanned autonomous helicopter with flight boundary constraints[J]. IEEE Trans.on Fuzzy Systems, 2023, 31 (1): 184- 198.
doi: 10.1109/TFUZZ.2022.3184386 |
| 3 |
FEMI T , MIJA S J . Output feedback based adaptive composite nonlinear flight control design for a small-scale un-crewed helicopter[J]. ISA Transactions, 2022, 126, 190- 202.
doi: 10.1016/j.isatra.2021.08.004 |
| 4 | CHAUDHARY A , BHUSHAN B . An improved teaching learning based optimization method to enrich the flight control of a helicopter system[J]. Sādhanā, 2022 (48): 222- 237. |
| 5 |
LUCIO R S , JAVIER G , DANIEL C G , et al. Unified motion control for multilift unmanned rotorcraft systems in forward flight[J]. IEEE Trans.on Control Systems Technology, 2023, 31 (4): 1607- 1621.
doi: 10.1109/TCST.2023.3240541 |
| 6 |
SHAO S Y , WANG L W , YAN X H , et al. Trajectory planning and prescribed performance tracking control based on fractional-order observers for unmanned helicopters with unmeasurable states[J]. Aerospace Science and Technology, 2023, 139, 108360.
doi: 10.1016/j.ast.2023.108360 |
| 7 | HYUNCHUL D, HYOUN K, SASTRY S. Control system design for rotorcraft-based unmanned aerial vehicles using time-domain system identification[C]//Proc. of the IEEE International Conference on Control Applications, 2000: 808-813. |
| 8 | MUSIAL M , BRANDENBURG U , HOMMEL G . Cooperative autonomous mission planning and execution for the flying robot MARVIN[J]. Intelligent Autonomous Systems, 2000, 6, 636- 643. |
| 9 |
MUTHUSAMY P K , TRAN V P , GARRATT M , et al. Resi-lient flight control for a 32g Nano helicopter[J]. IEEE Trans.on Industrial Electronics, 2024, 71 (12): 16057- 16067.
doi: 10.1109/TIE.2024.3387096 |
| 10 | DAI J Y, HU F, YING J, et al. Research on attitude control algorithm based on improved linear active disturbance rejection control for unmanned helicopter[C]//Proc. of the Chinese Control and Decision Conference, 2019: 1498-1503. |
| 11 |
QIAO F X , SHI J P , QU X B , et al. Hardware-in-loop adaptive neural control for a tiltable V-tail morphing aircraft[J]. Defence Technology, 2023, 22, 197- 211.
doi: 10.1016/j.dt.2021.12.012 |
| 12 |
SILVA C , RAKOCZY J , GUTIERREZ H . Precision landing comparison between smartphone video guidance sensor and IRlock by hardware-in-the-loop emulation[J]. CEAS Space Journal, 2024, 16, 475- 489.
doi: 10.1007/s12567-023-00518-8 |
| 13 |
SUO B , WANG M N , YUAN F M , et al. Integrity detection and supplementary experimental design of semi-physical simulation data on aircraft landing points[J]. Applied Science, 2023, 13 (5): 2889.
doi: 10.3390/app13052889 |
| 14 |
LIN Z L , WANG W X , LI Y F , et al. Design and experimental study of a novel semi-physical unmanned-aerial-vehicle simulation platform for optical-flow-based navigation[J]. Aerospace, 2023, 10 (2): 183.
doi: 10.3390/aerospace10020183 |
| 15 | XU H Z, HUANG J, ZHOU Y M. Design of multi-mode flight control system for unmanned helicopter[C]//Proc. of the 30th Chinese Control Conference, 2011: 3660-3663. |
| 16 |
GUO J D , LIU Z G , SONG Y G , et al. Research on multi-UAV formation and semi-physical simulation with virtual structure[J]. IEEE Access, 2023, 11, 126027- 126039.
doi: 10.1109/ACCESS.2023.3330149 |
| 17 |
ATHAYDE A , MOUTINHO A , AZINHEIRA J R . Experimental nonlinear and incremental control stabilization of a tail-sitter UAV with hardware-in-the-loop validation[J]. Robotics, 2024, 13 (3): 51- 83.
doi: 10.3390/robotics13030051 |
| 18 |
PARK S H , KWON O J , LEE S . Aerodynamic analysis of high-speed compound unmanned rotorcraft using an unstructured flow solver[J]. International Journal of Aeronautical and Space Sciences, 2023, 24, 1077- 1085.
doi: 10.1007/s42405-023-00595-3 |
| 19 |
ZHAO H B , WANG B , SHEN Y Y , et al. Development of multimode flight transition strategy for tilt-rotor VTOL UAVs[J]. Drones, 2023, 7 (9): 580.
doi: 10.3390/drones7090580 |
| 20 | MOHAMMADREZA M, JUNYI G, AZARAKHSH K, et al. Design, modeling and control for a tilt-rotor VTOL UAV in the presence of actuator failure[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4310-4317. |
| 21 |
LUO K B , SHI S , PENG C . Smooth tracking control for conversion mode of a tilt-rotor aircraft with switching modeling[J]. Frontiers of Information Technology & Electronic Engineering, 2023, 24, 1591- 1600.
doi: 10.1631/FITEE.2300266 |
| 22 | GU X , XIAN B , WANG Y X , et al. Geometry-based adaptive tracking control for an underactuated small-size unmanned helicopter[J]. IEEE Trans.on Systems, 2023, 53 (12): 7489- 7500. |
| 23 |
HARUNA A , MOHAMED Z , ABDULLAHI A M . Switched step integral backstepping control for nonlinear motion systems with application to a laboratory helicopter[J]. ISA Transactions, 2023, 141, 470- 480.
doi: 10.1016/j.isatra.2023.07.002 |
| 24 | GAONKAR G H, PETERS D A. Review of dynamic inflow modelling for rotorcraft flight dynamics[C]//Proc. of the 27th Structures, Structural Dynamics and Materials Conference, 1986: 89-115. |
| 25 | 陈培, 徐锦法. 四倾转旋翼飞行器直升机模式操纵策略设计与验证[J]. 飞行力学, 2023, 41 (5): 65- 73. |
| CHEN P , XU J F . Design and verification of manipulation strategy for quad tiltrotor aircraft in the helicopter mode[J]. Flight Dynamics, 2023, 41 (5): 65- 73. | |
| 26 |
CARLSON E B , ZHAO Y J . Optimal short takeoff of tilt rotor aircraft in one engine failure[J]. Journal of Aircraft, 2002, 39 (2): 280- 289.
doi: 10.2514/2.2925 |
| 27 |
CASTILLO R S , TOMAS R M . Helicopter nonlinear aerodynamics modelling using VehicleSim[J]. Advances in Engineering Software, 2016, 100, 252- 265.
doi: 10.1016/j.advengsoft.2016.08.001 |
| 28 |
KUMAR A , BENTZVI P . Estimation of wind conditions utilizing RC helicopter dynamics[J]. IEEE/ASME Trans.on Mechatronics, 2019, 24 (5): 2293- 2303.
doi: 10.1109/TMECH.2019.2937844 |
| 29 | 邓柏海, 徐锦法. 复合式无人直升机姿态自抗扰控制[J]. 北京航空航天大学学报, 2023, 49 (11): 3100- 3107. |
| DENG B H , XU J F . Attitude active disturbance rejection control of compound unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (11): 3100- 3107. | |
| 30 |
LYU Z C , WANG Z G , DUAN D Y , et al. Tilting path optimization of tilt quad rotor in conversion process based on ant colony optimization algorithm[J]. IEEE Access, 2020, 8, 140777- 140791.
doi: 10.1109/ACCESS.2020.3012672 |
| 31 | GAO Z Q. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//Proc. of the American Control Conference, 2006. |
| 32 |
HAN J Q . From PID to active disturbances rejection control[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 33 | 吴超, 王浩文, 张玉文. 基于LADRC的无人直升机轨迹跟踪[J]. 航空学报, 2015, 36 (2): 473- 483. |
| WU C , WANG H W , ZHANG Y W . Trajectory tracking of unmanned helicopter based on LADRC[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36 (2): 473- 483. | |
| 34 |
SHEN S Y , XU J F . Trajectory tracking active disturbance rejection control of the unmanned helicopter and its parameters tuning[J]. IEEE Access, 2021, 9, 56773- 56785.
doi: 10.1109/ACCESS.2021.3071457 |
| [1] | WANG Biao, TANG Chaoying, YAO Zhennan. Trajectory tracking control of unmanned aerial vehicles based oncascaded LADRC design [J]. Systems Engineering and Electronics, 2019, 41(6): 1358-1365. |
| [2] | JIN Jian, CHEN Bohan. Analysis on control strategies of CO2 partial pressure of manned spacecraft assemble with multi-cabins [J]. Systems Engineering and Electronics, 2018, 40(6): 1351-1357. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||