Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (11): 3559-3567.doi: 10.12305/j.issn.1001-506X.2025.11.05
• Electronic Technology • Previous Articles
Tiny objects detection method for unmanned aerial vehicle ship images based on STOD
Jie JIANG( ), Wenjun YAN, Qing LING, Limin ZHANG
), Wenjun YAN, Qing LING, Limin ZHANG
- Information Fusion Research Institute,Naval Aviation University,Yantai 264001,China
-
Received:2025-03-14Accepted:2025-07-24Online:2025-11-25Published:2025-12-08 -
Contact:Wenjun YAN E-mail:81348541@qq.com
CLC Number:
Cite this article
Jie JIANG, Wenjun YAN, Qing LING, Limin ZHANG. Tiny objects detection method for unmanned aerial vehicle ship images based on STOD[J]. Systems Engineering and Electronics, 2025, 47(11): 3559-3567.
share this article

Fig.1
Network structure diagram"
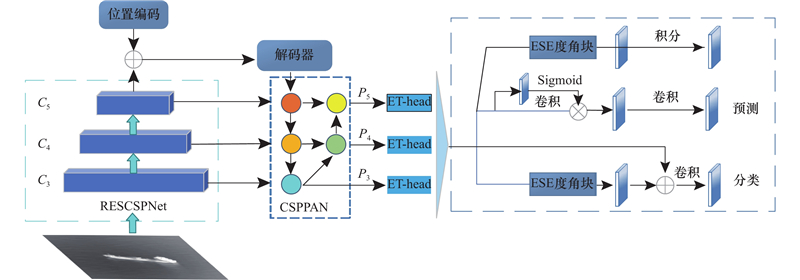
Fig.2
Image encoding flowchart diagram"
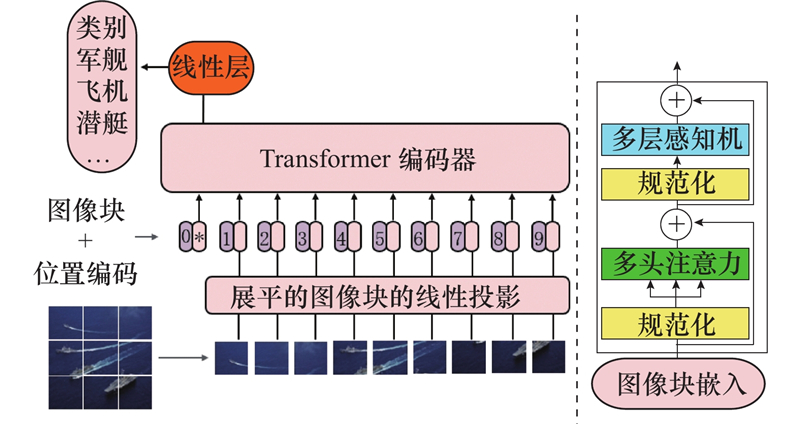
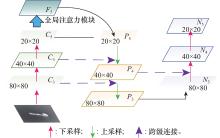
Fig.3
CSPPAN architecture"
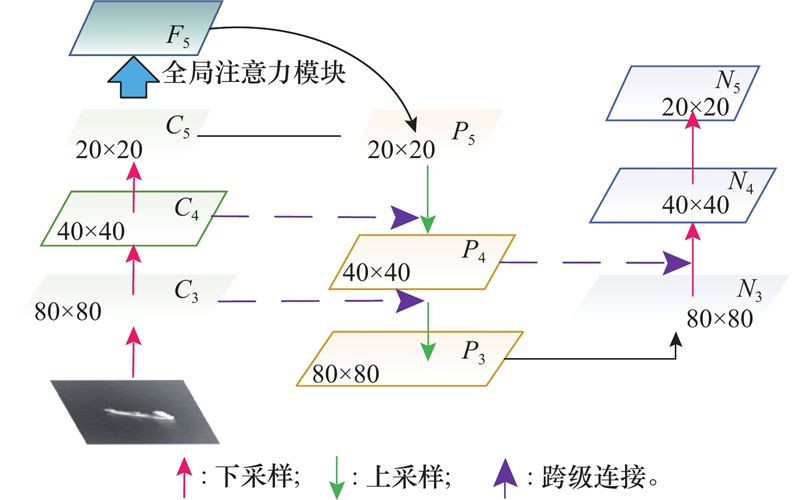
Fig.4
Collaboration mechanism"
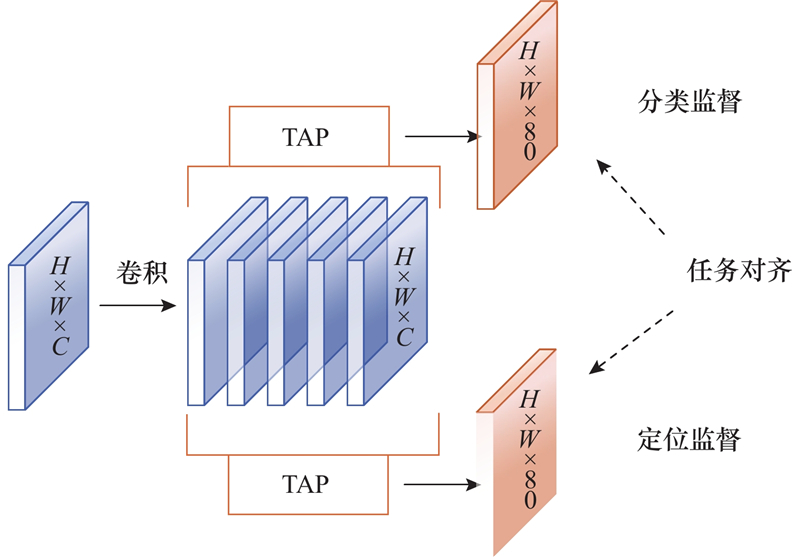
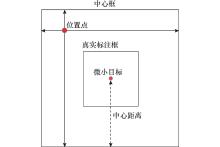
Fig.5
Schematic diagram of DFL regression range vectorization"
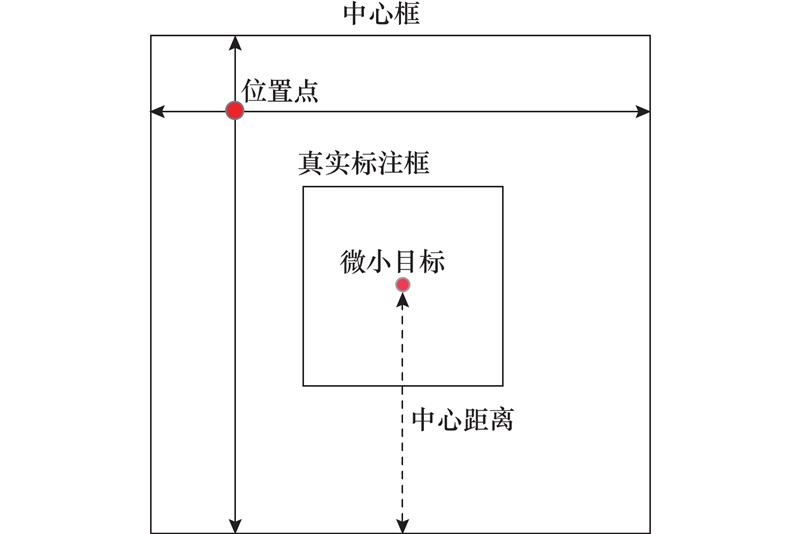

Fig.6
Ship dataset"

Table 1
Target size statistics"
| 序号 | 类别 | 数量 |
| 1 | 中目标 | |
| 2 | 小目标 | |
| 3 | 微小目标 |
Fig.7
Target statistical characteristics"
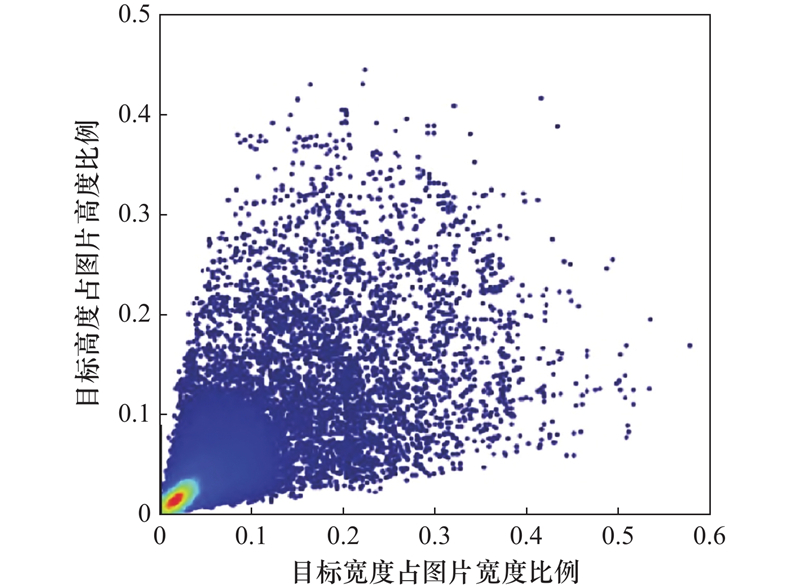

Fig.8
Network training results"
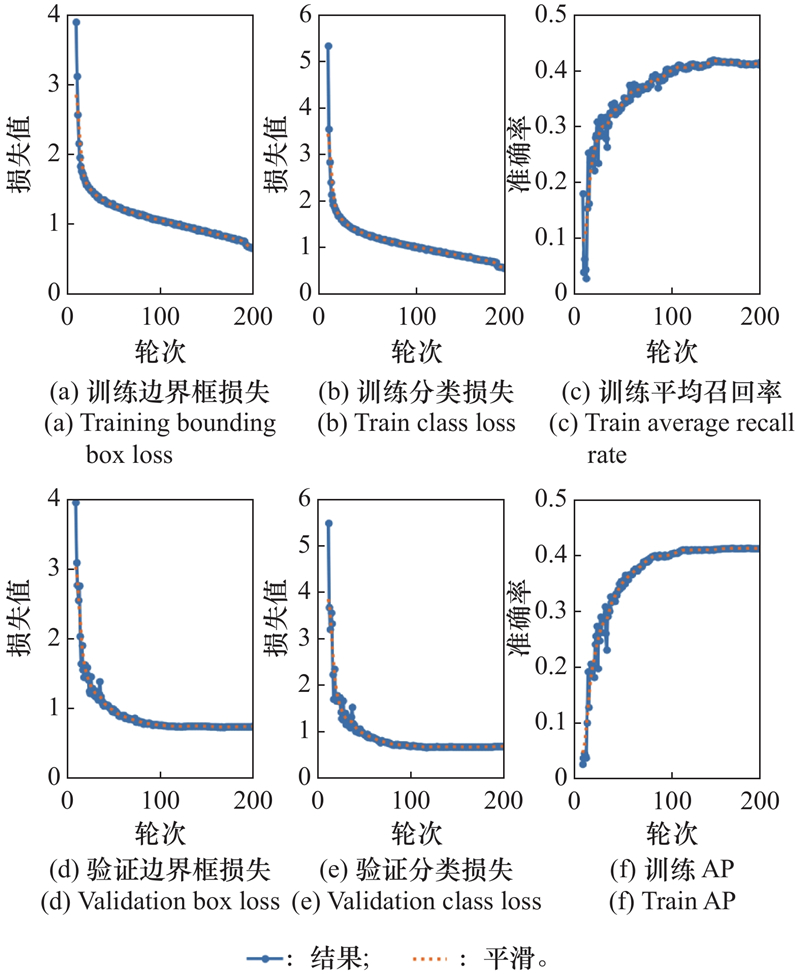
Table 2
Ablation experimental results"
| 模块 | AP/% | 参数量 (×106) | 运算量/ GFLOPs | 时延/ ms | FPS |
| 基线模型 | 47.4 | 50.63 | 110.75 | 12.9 | 55.4 |
| 增加无锚框 | 47.1(−0.3) | 48.54 | 108.47 | 12.1 | 56.3 |
| 改进网络结构 | 47.5(+0.4) | 46.32 | 104.51 | 11.2 | 58.7 |
| +全局注意力模块 | 48.0(+0.5) | 48.42 | 106.87 | 12.2 | 56.1 |
| +CSPPAN | 48.7(+0.7) | 52.31 | 110.07 | 13.1 | 55.3 |
| ET-head | 49.6(+0.9) | 53.68 | 114.78 | 14.1 | 53.3 |
| +基于向量DFL | 50.1(+0.5) | 55.58 | 115.77 | 15.3 | 52.2 |
Fig.9
Vector-based DFL performance verification"
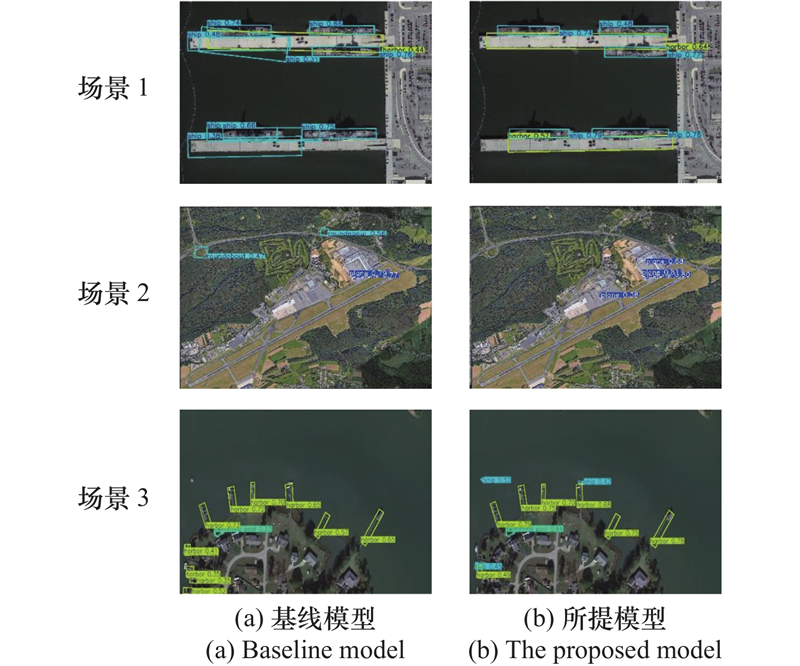
Table 3
Verification of weight coefficients"
| 参数组合 | AP/% | AP50 /% | 推理速度/(帧/s) |
| α=1.0, β=0.5, γ=0.5 | 33.2 | 56.7 | 53.1 |
| α=1.2, β=0.6, γ=0.4 | 33.8 | 58.3 | 52.7 |
| α=0.8, β=1.0, γ=0.3 | 33.1 | 55.2 | 53.6 |
Table 4
Performance comparison of different algorithms %"
| 算法名称 | AP | AP50 | AP75 | APT | APS | APM |
| 扩展FPN | 29.13 | 54.07 | 27.38 | 29.64 | 32.98 | 77.13 |
| 大核卷积与层次特征融合 | 28.55 | 56.63 | 26.68 | 29.68 | 33.15 | 74.51 |
| 多尺度特征提取与跨阶段 特征融合网络 | 27.33 | 49.56 | 26.55 | 32.13 | 36.84 | 78.01 |
| 密集卷积注意力网络 | 26.46 | 48.34 | 25.38 | 31.45 | 35.71 | 76.49 |
| 多重注意力轻量化网络 | 26.35 | 47.98 | 25.45 | 32.09 | 36.78 | 76.17 |
| YOLOX | 31.28 | 60.39 | 29.61 | 32.15 | 37.14 | 77.84 |
| YOLOv8-p2 | 33.52 | 62.41 | 32.16 | 32.44 | 37.79 | 78.11 |
| YOLOv9 | 33.64 | 62.56 | 32.45 | 32.49 | 37.83 | 78.31 |
| YOLOv10 | 33.84 | 62.78 | 32.31 | 32.61 | 38.02 | 78.40 |
| 本文算法 | 34.61 | 63.25 | 32.54 | 32.72 | 38.16 | 78.47 |
Fig.10
Algorithm performance verification of the proposed"
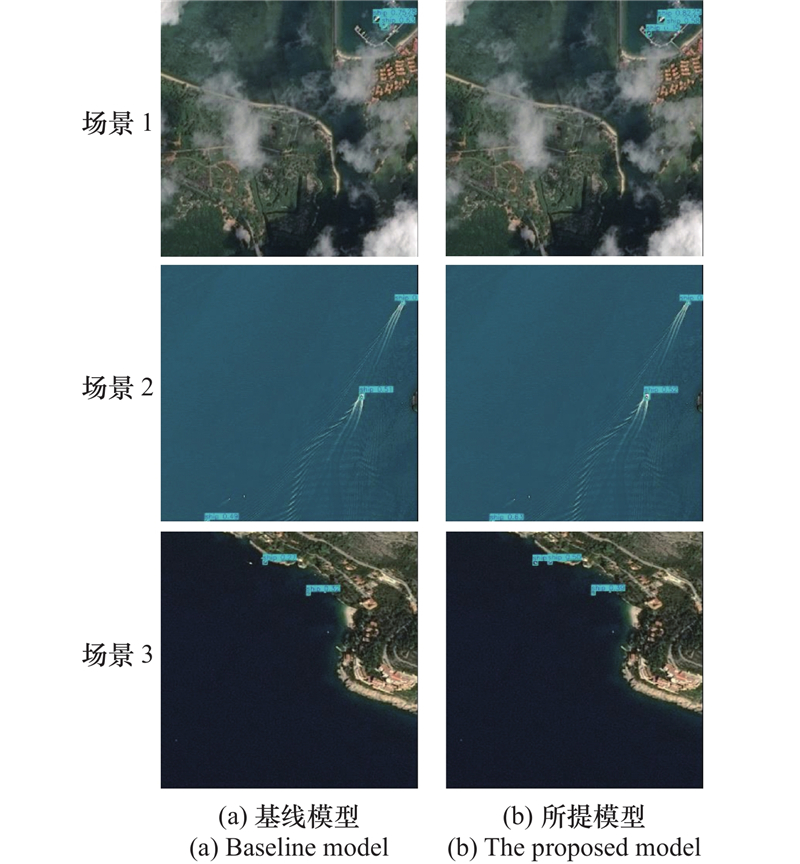

Fig.11
Visual analysis"
| 1 |
ZHANG H, CAO C H, XU L W, et al. A UAV detection algorithm based on an artificial neural network[J]. IEEE Access, 2018, 6, 24720- 24728.
doi: 10.1109/ACCESS.2018.2831911 |
| 2 |
REKAVANDI A M, RASHIDI S, BOUSSAID F, et al. Transformers in small object detection: a benchmark and survey of state-of-the-art[J]. IEEE Trans. on Image Processing, 2021, 30, 5017- 5031.
doi: 10.1109/TIP.2021.3077139 |
| 3 | HASSAN S A, RAHIM T, SHIN S Y. Real-time UAV detection based on deep learning network[C]//Proc. of the International Conference on Information and Communication Technology Convergence, 2019. |
| 4 |
OPROMALLA R, FASANO G, ACCARDO D. A vision-based approach to UAV detection and tracking in cooperative applications[J]. Sensors, 2018, 18 (10): 3391.
doi: 10.3390/s18103391 |
| 5 |
KOU R, WANG C P, PENG Z M, et al. Infrared small target segmentation networks: a survey[J]. Pattern Recognition, 2023, 143, 109788.
doi: 10.1016/j.patcog.2023.109788 |
| 6 | BAI X Z, CHEN Z G, ZHANG Y, et al. Infrared ship target segmentation based on spatial information improved FCM[J]. IEEE Trans. on Cybernetics, 2015, 46 (12): 3259- 3271. |
| 7 |
LIU Z Y, ZHOU F G, CHEN X W, et al. Iterative infrared ship target segmentation based on multiple features[J]. Pattern Recognition, 2014, 47 (9): 2839- 2852.
doi: 10.1016/j.patcog.2014.03.005 |
| 8 |
BAI X Z, LIU M M, WANG T, et al. Feature based fuzzy inference system for segmentation of low-contrast infrared ship images[J]. Applied Soft Computing, 2016, 46, 128- 142.
doi: 10.1016/j.asoc.2016.05.004 |
| 9 |
SONG Z Z, YANG J W, ZHANG D F, et al. Semi-supervised dim and small infrared ship detection network based on haar wavelet[J]. IEEE Access, 2021, 9, 29686- 29695.
doi: 10.1109/ACCESS.2021.3058526 |
| 10 |
REN Y M, YANG J, GUO Z Q, et al. Ship classification based on attention mechanism and multi-scale convolutional neural network for visible and infrared images[J]. Electronics, 2020, 9 (12): 2022.
doi: 10.3390/electronics9122022 |
| 11 |
HAN J H, MA Y, ZHOU B, et al. On human visual system[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11 (12): 2168- 2172.
doi: 10.1109/LGRS.2014.2323236 |
| 12 | WANG K Y, DU S Y, LIU C X, et al. Interior attention-aware network for infrared small target detection[J]. IEEE Trans. on Geoscience and Remote Sensing, 2022, 60: 5002013. |
| 13 | ZHANG M J, ZHANG R, YANG Y X, et al. ISNet: shape matters for infrared small target detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 877−886. |
| 14 | ZHAO B, WANG C P, FU Q, et al. A novel pattern for infrared small target detection with generative adversarial network[J]. IEEE Trans. on Geoscience and Remote Sensing, 2020, 59 (5): 4481- 4492. |
| 15 | HOU Q Y, WANG Z P, TAN F J, et al. RISTDNet: robust infrared small target detection network[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 19, 7000805. |
| 16 |
DAI Y Y, WU Y Q, ZHOU F, et al. Attentional local contrast networks for infrared small target detection[J]. IEEE Trans. on Geoscience and Remote Sensing, 2021, 59 (11): 9813- 9824.
doi: 10.1109/TGRS.2020.3044958 |
| 17 | THECKEDATH D, SEDAMKAR R R. Detecting affect states using VGG16, ResNet50 and SE-ResNet50 networks[J]. SN Computer Science, 2020, 1: 79. |
| 18 | WANG C Y, LIAO H, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. 2020: 390−391. |
| 19 | XU W J, LONG C J, WANG R S, et al. DRB-GAN: a dynamic resblock generative adversarial network for artistic style transfer[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 6383−6392. |
| 20 | XU G Y, XU Y, ZHANG S C, et al. SFRNet: feature extraction-fusion steganalysis network based on squeeze-and-excitation block and RepVgg block[J]. Security and Communication Networks, 2021, 1, 3676720. |
| 21 | YANG J F, FU X Y, HU Y W, et al. PanNet: a deep network architecture for pan-sharpening[C]//Proc. of the IEEE International Conference on Computer Vision, 2017: 5449−5457. |
| 22 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[EB/OL]. [2025-02-04]. https: //arxiv.org/abs/1706.03762. |
| 23 | GONG Y Q, YU X H, DING Y, et al. Effective fusion factor in FPN for tiny object detection[C]//Proc. of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2021: 1160−1168. |
| 24 | FENG C, ZHONG Y, GAO Y, et al. Tood: task-aligned one-stage object detection[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 3490−3499. |
| 25 | 姜杰, 张立民, 刘凯, 等. 基于改进PP-YOLOE和ByteTrack算法的红外船舶目标检测跟踪方法[J]. 兵器装备工程学报, 2024, 45 (11): 291- 297. |
| JIANG J, ZHANG L M, LIU K, et al. Infrared ship target detection and tracking method based on improved PP-YOLOE and Bytetrack algorithms[J]. Journal of Weapon Equipment Engineering, 2024, 45 (11): 291- 297. | |
| 26 | 姜杰, 凌青, 闫文君, 等. 基于MFFDet-R的多源舰船图像融合检测方法[J]. 系统工程与电子技术, 2025, 47 (2): 390- 397. |
| JIANG J, LING Q, YAN W J, et al. Multi source ship image fusion detection method based on MFFDet-R[J]. Systems Engineering and Electronics, 2025, 47 (2): 390- 397. | |
| 27 | MALHOTRA R, SHAKYA A, RANJAN R, et al. Software defect prediction using binary particle swarm optimization with binary cross entropy as the fitness function[J] Journal of Physics: Conference Series, 2021, 1767(1): 012003. |
| 28 |
YANG X, YANG X J, YANG J R, et al. Learning high-precision bounding box for rotated object detection via kullback-leibler divergence[J]. Advances in Neural Information Processing Systems, 2021,
doi: 10.48550/arXiv.2160.01883 |
| 29 | LI X, WANG W H, WU L J, et al. Generalized focal loss: learning qualified and distributed bounding boxes for dense object detection[J]. Advances in Neural Information Processing Systems, 2020, 33, 21002- 21012. |
| 30 | FU A M, ZHANG X L, ZHONG N X, et al. VFL: a verifiable federated learning with privacy-preserving for big data in industrial IoT[J]. IEEE Trans. on Industrial Informatics, 2020, 18 (5): 3316- 3326. |
| 31 | 姜杰, 张立民, 刘凯, 等. 基于任务对齐学习的红外船舶目标检测方法[J]. 系统工程与电子技术, 2025, 47 (1): 34- 40. |
| JIANG J, ZHANG L M, LIU K, et al. Infrared ship target detection method based on task alignment learning[J]. Systems Engineering and Electronics, 2025, 47 (1): 34- 40. |
| [1] | Kaiming LI, Yuanpeng ZHANG, Ying LUO, Xiaonan DAI. Research progress on radar target recognition of ballistic missile [J]. Systems Engineering and Electronics, 2025, 47(9): 2870-2889. |
| [2] | Xiaolong WEI, Yarong WU, Dengkai YAO, Guhao ZHAO. Hierarchical decision-making algorithm for UAV air combat maneuvering based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(9): 2993-3003. |
| [3] | Dapeng YANG, Zihao GONG, Xiaoye WANG, Zhengyu GUO, Delin LUO. Research on UAV cooperative interception maneuver decision-making based on multi-agent reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(9): 3076-3085. |
| [4] | Ce JI, Xiangyu MA, Xiaoyu MU, Jiayi ZHAO. TS-GRU-VTA: vehicle channel estimation scheme based on deep learning [J]. Systems Engineering and Electronics, 2025, 47(9): 3093-3098. |
| [5] | Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests [J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631. |
| [6] | Xiaowei YAN, Chong LING, Shengbin SHI. Design and implementation of a rapid detection system for surface unexploded submunitions [J]. Systems Engineering and Electronics, 2025, 47(8): 2639-2645. |
| [7] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Attack-defense confrontation strategy of multi-UAV based on APIQ algorithm [J]. Systems Engineering and Electronics, 2025, 47(7): 2205-2215. |
| [8] | Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial [J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338. |
| [9] | Junchao TANG, Chunhe HU. Complete coverage path planning for UAVs in 3D terrain and wind field environment [J]. Systems Engineering and Electronics, 2025, 47(7): 2349-2356. |
| [10] | Yunfeng HE, Xianjun SHI, Jianhua LU, Chaolun ZHAO, Guorong ZHAO. Multi-UAV grouping formation control based on synchronous DMPC under fault conditions [J]. Systems Engineering and Electronics, 2025, 47(7): 2357-2370. |
| [11] | Wanying ZHANG, Youbing GAO, Zeyi LI, Pengfei LI, Wei ZHANG. Background signal suppression algorithm based on dual-path feature fusion net [J]. Systems Engineering and Electronics, 2025, 47(7): 2406-2413. |
| [12] | Xinzheng ZHANG, Mengke YAN, Xiaolin ZHU. Noise pseudo-label tolerant semi-supervised SAR target recognition [J]. Systems Engineering and Electronics, 2025, 47(6): 1796-1805. |
| [13] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879. |
| [14] | Zhijie JIANG, Heng SONG, Nan HU, Lanxi DUAN, Ping CAO. Target recognition and classification algorithm of MMW radar in tunnel [J]. Systems Engineering and Electronics, 2025, 47(5): 1453-1460. |
| [15] | Ruijing CUI, Jianbin SUN, GKewei YAN, Minghao LI. Construction method of equipment operational test indicator system based on UAF [J]. Systems Engineering and Electronics, 2025, 47(5): 1536-1550. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||