Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (10): 3155-3167.doi: 10.12305/j.issn.1001-506X.2025.10.04
• Electronic Technology • Previous Articles
Enhanced hierarchical fusion algorithm based on adaptive maneuvering frequency
Gaozhi ZHONG1( ), Hongyi XU2, Changbo HOU1,*, Pengqi ZHAO1, Haonan GUO1
), Hongyi XU2, Changbo HOU1,*, Pengqi ZHAO1, Haonan GUO1
- 1. College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China
2. Beijing Institute of Electronic System Engineering, Beijing 100854, China
-
Received:2024-08-27Online:2025-10-25Published:2025-10-23 -
Contact:Changbo HOU E-mail:2845520623@qq.com
CLC Number:
Cite this article
Gaozhi ZHONG, Hongyi XU, Changbo HOU, Pengqi ZHAO, Haonan GUO. Enhanced hierarchical fusion algorithm based on adaptive maneuvering frequency[J]. Systems Engineering and Electronics, 2025, 47(10): 3155-3167.
share this article

Fig.1
Schematic diagram of detection scenarios for unmanned aerial vehicle equipment using multiple detection sources"
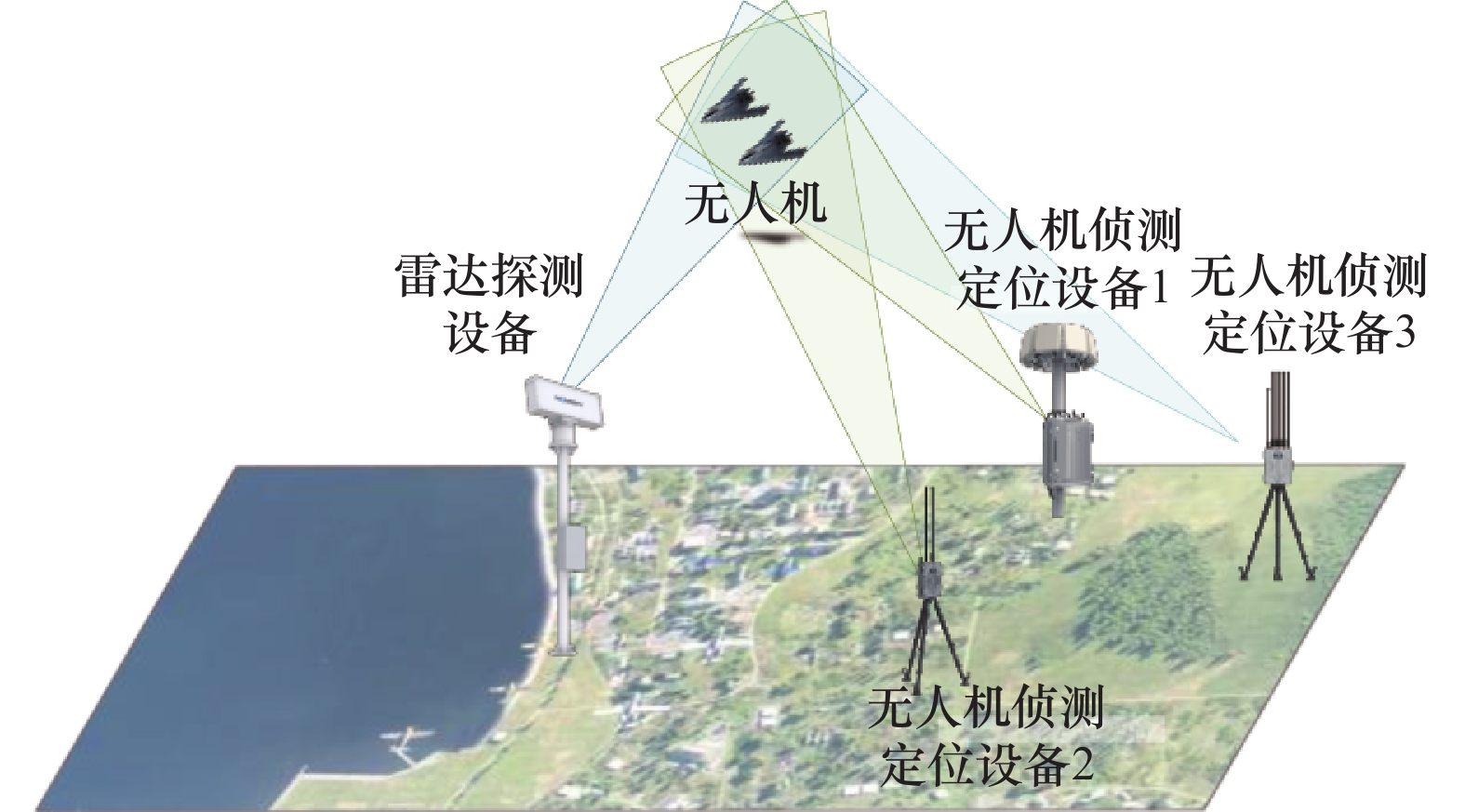
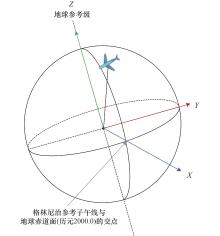
Fig.2
Schematic diagram of CGCS2000 geocentric coordinate system"
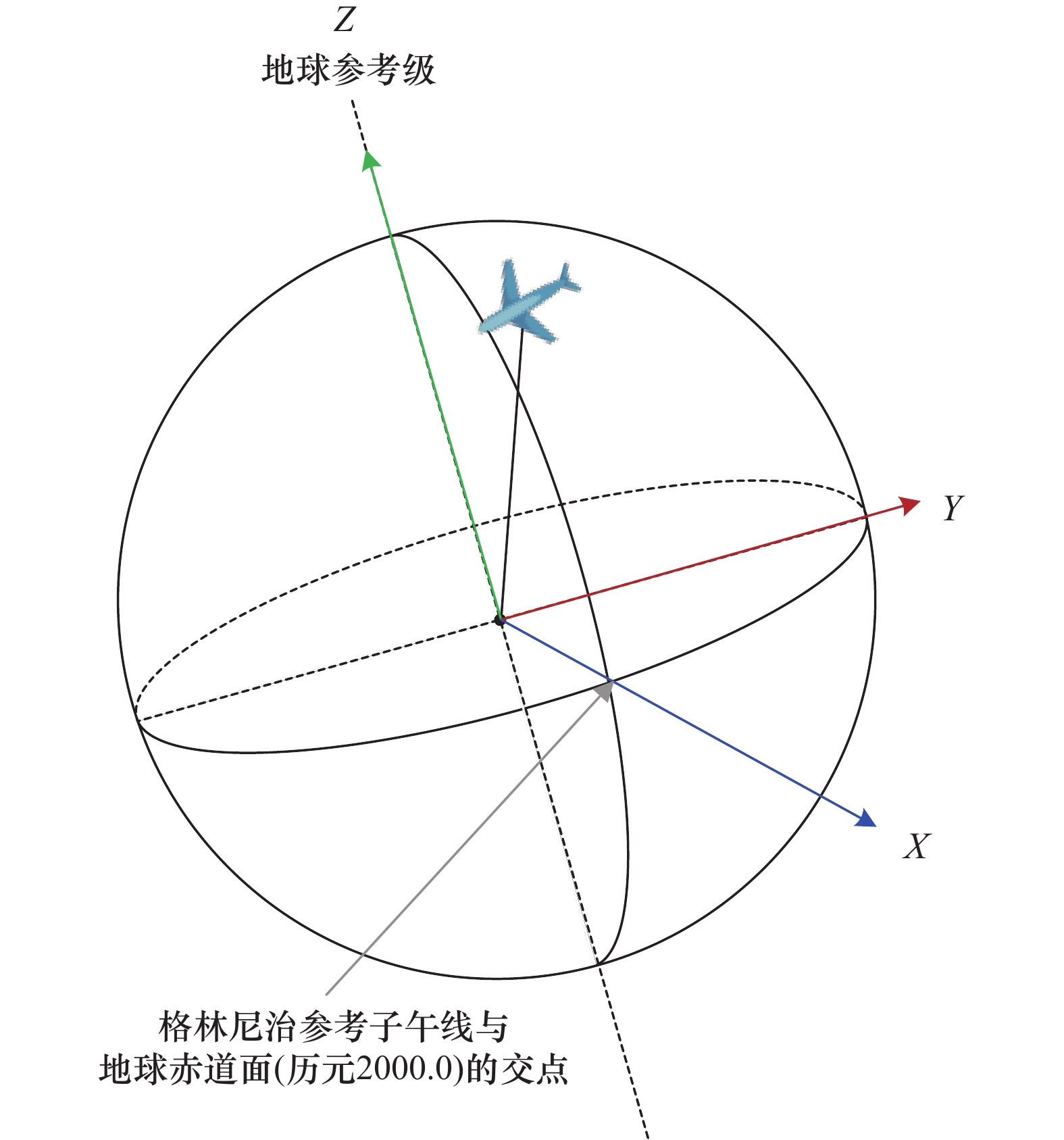
Table 1
Definition table for input and output of WGS-84 coordinate system conversion to CGCS2000 coordinate system"
| 变量 | 符号 | 变量描述 | 注释 |
| 输入变量 | 经度、纬度、高度列表 | 基于WGS-84坐标系 | |
| 输出变量 | X 轴、Y 轴、Z 轴 坐标列表 | 基于CGCS2000 地心坐标系 |
Table 2
Definition table for input and output of WGS-84 coordinate system conversion to CGCS2000 coordinate system"
| 变量 | 符号 | 变量描述 | 注释 |
| 输入变量 | 原点距离、方位角、 俯仰角列表 | 基于极坐标系 | |
| 输出变量 | 经度、纬度、高度列表 | 基于WGS-84坐标系 |
Table 3
Definition of input output fusion of simple CC filter"
| 变量 | 符号 | 变量描述 | 注释 |
| 输入变量 | 传感器 | 基于CGCS2000 地心坐标系 | |
| 传感器 | − | ||
| 传感器 | 基于CGCS2000 地心坐标系 | ||
| 传感器 | − | ||
| 输出变量 | 融合后的状态估计 | 基于CGCS2000 地心坐标系 | |
| 融合后的误差协方差 | − |
Table 4
Definition of BSC filter fusion input output"
| 变量 | 符号 | 变量描述 | 注释 |
| 输入变量 | 传感器 | ||
| 输出变量 | 传感器 |
Table 5
Definition of hierarchical filtering fusion input output"
| 变量 | 符号 | 变量描述 | 注释 |
| 输入变量 | 传感器 | − | |
| 传感器i在k时刻的状态预测 | 基于上一时刻 | ||
| 传感器 | − | ||
| 系统航迹在k时刻的状态预测 | 基于上一时刻 | ||
| 系统航迹在k时刻的预测协方差 | 基于上一时刻 | ||
| 输出变量 | 融合后在k时刻的状态估计 | − | |
| 融合后在k时刻的误差协方差 | − |
Fig.3
Adaptive HF model diagram for maneuvering frequency"
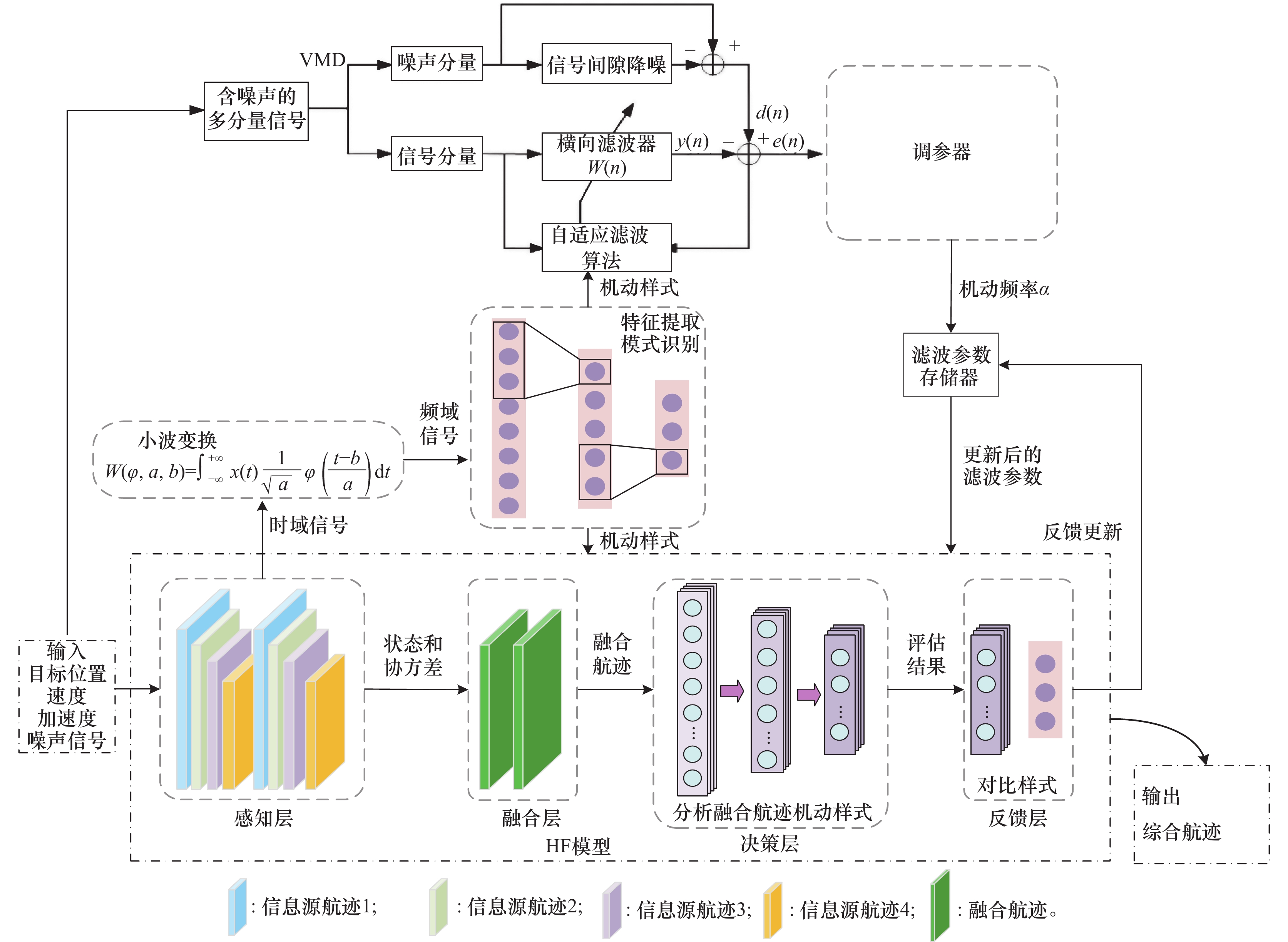
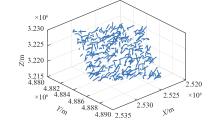
Fig.4
Multi batch dataset true value track (three-dimensional diagram)"
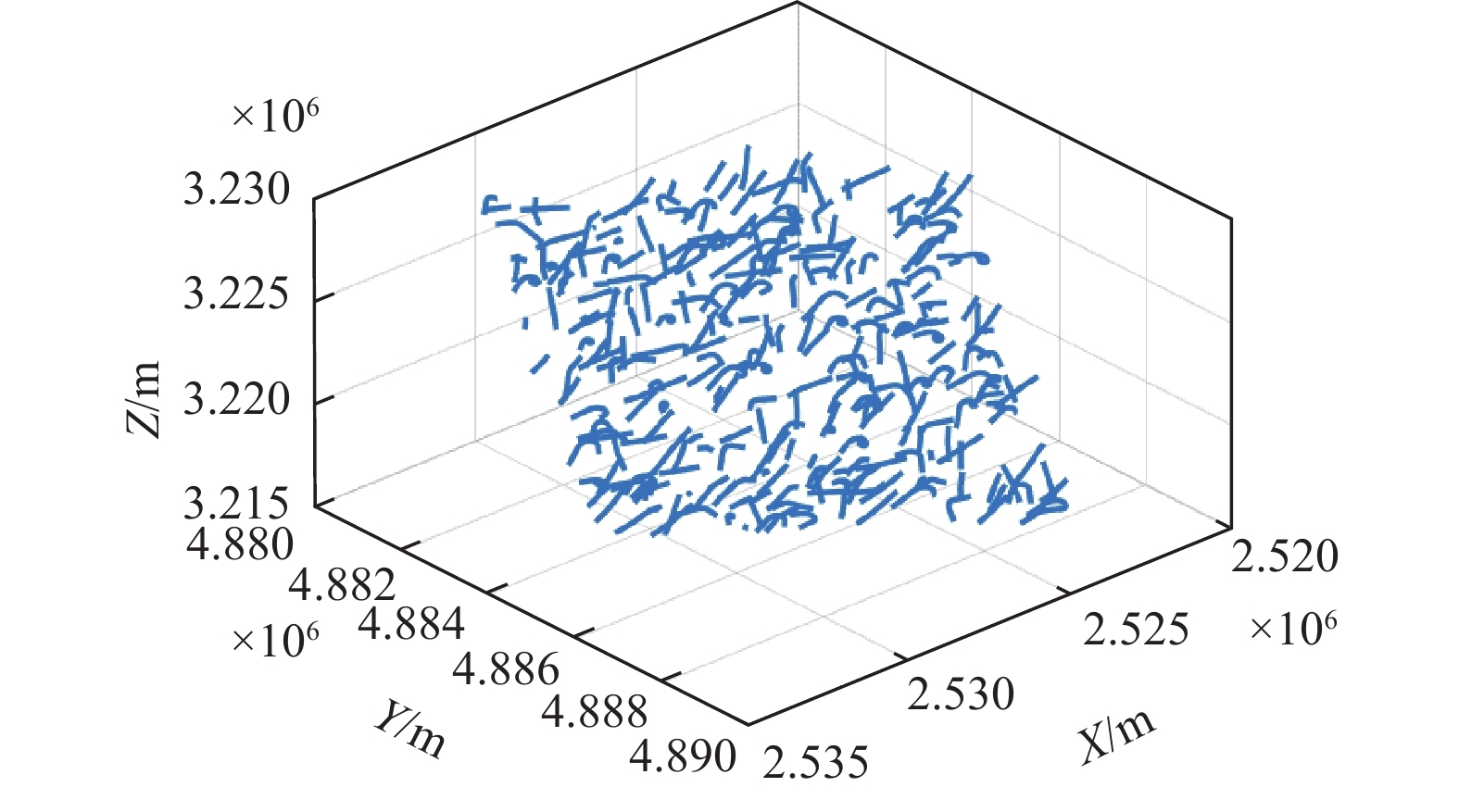
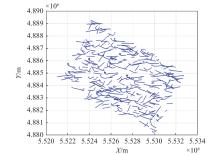
Fig.5
Multi batch dataset true value track (two-dimensional diagram)"
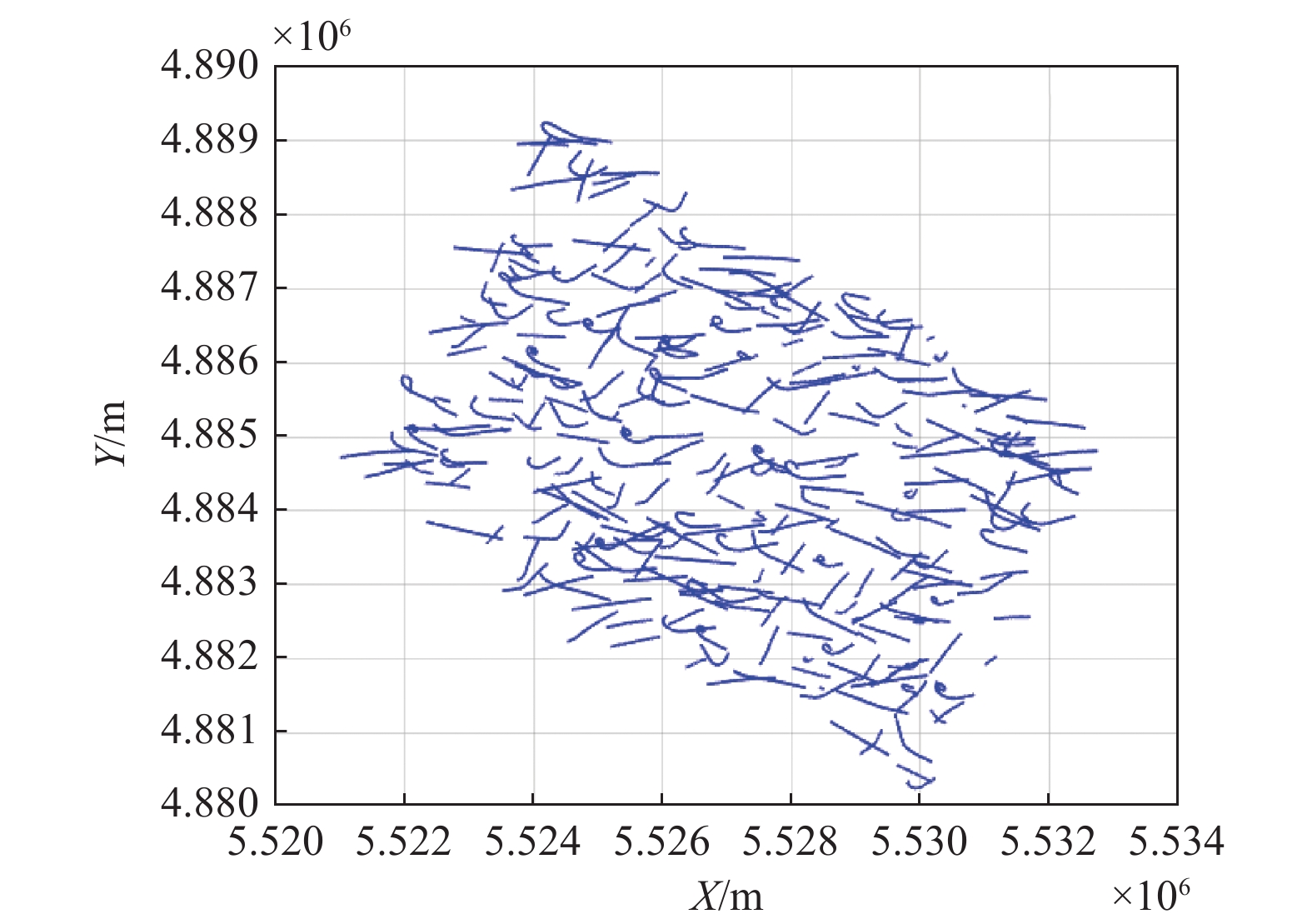
Fig.6
Multi batch dataset information source track"
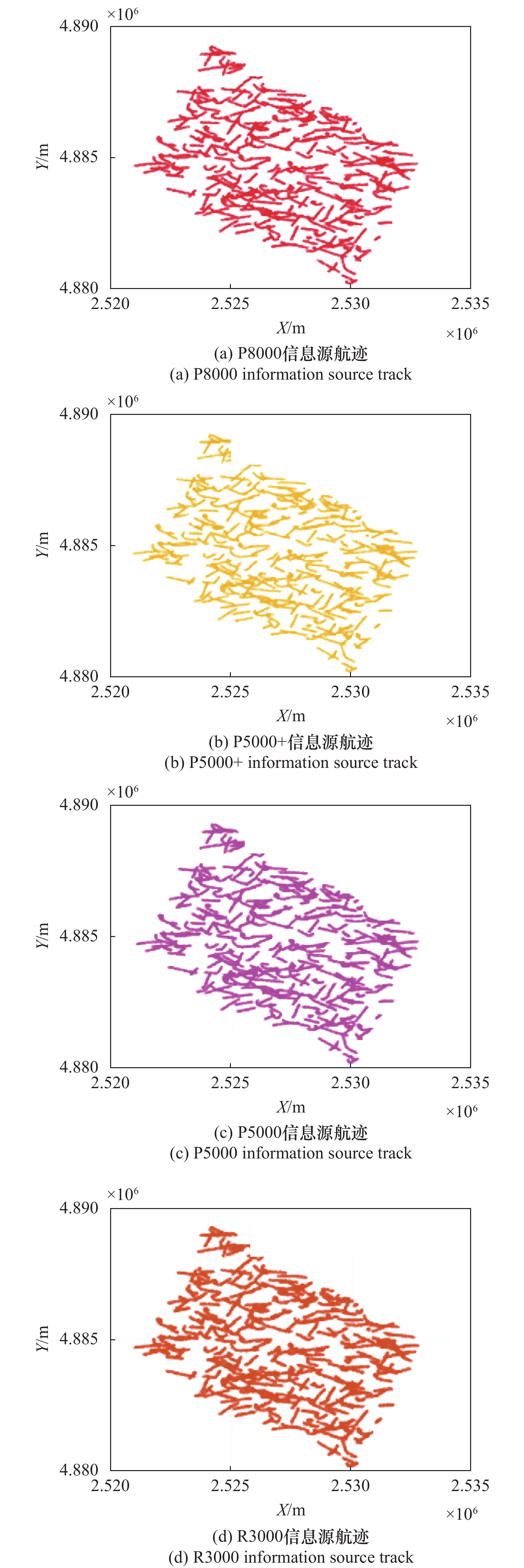
Table 6
Input features of information sources multi source information fusion model"
| 序号 | 传感器 | 探测距离/km | 精度/m | 刷新率/s | 探测频率 |
| 1 | SC-P5000 | 5~10 | ≤8 | ≤2 | 2.4 GHz/5.8 GHz |
| 2 | SC-P5000+ | 5~10 | ≤6 | ≤2 | 900 MHz/1.4 GHz/ 2.4 GHz/5.8 GHz |
| 3 | SC-P8000 | 8~10 | ≤4 | ≤2 | 800 MHz— 2.4 GHz/5.2 GHz/5.8 GHz |
| 4 | SC-R3000 | 3 | ≤25 | ≤1 | 5.2 GHz/5.8 GHz/12.5 GHz |
Table 7
Information source track error record"
| 序号 | 信息源航迹 | RMSE/m | 系统误差/m |
| 1 | SC-P8000 | 3.98 | 3.83 |
| 2 | SC-P5000+ | 5.23 | 5.11 |
| 3 | SC-P5000 | 7.35 | 7.26 |
| 4 | SC-R3000 | 18.15 | 17.27 |
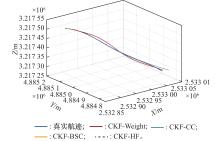
Fig.7
Comparison of various fusion schemes for generating comprehensive tracks based on empirical parameters"
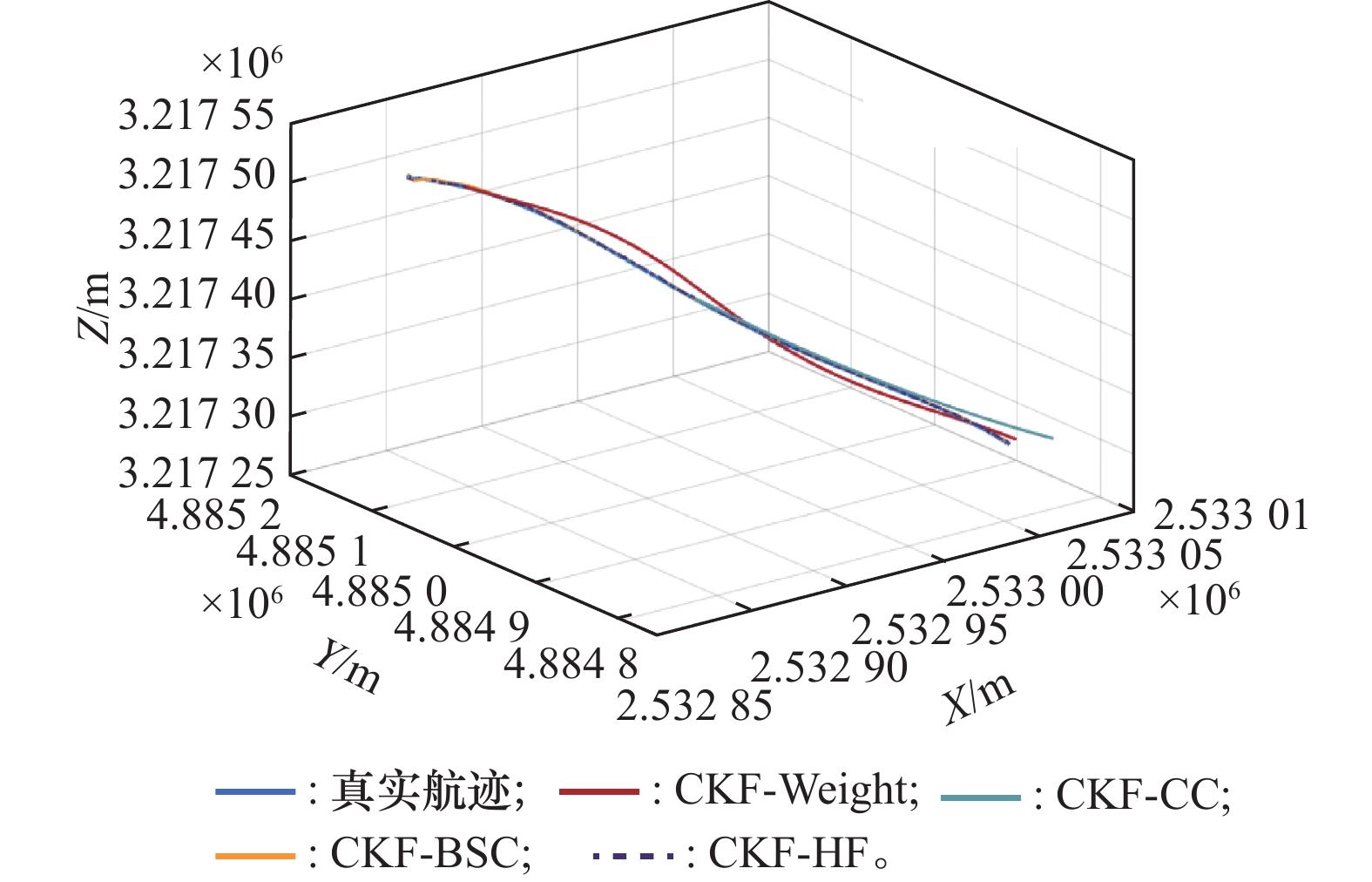
Fig.8
Comparison of various fusion schemes for generating comprehensive tracks based on adaptive maneuvering frequency"
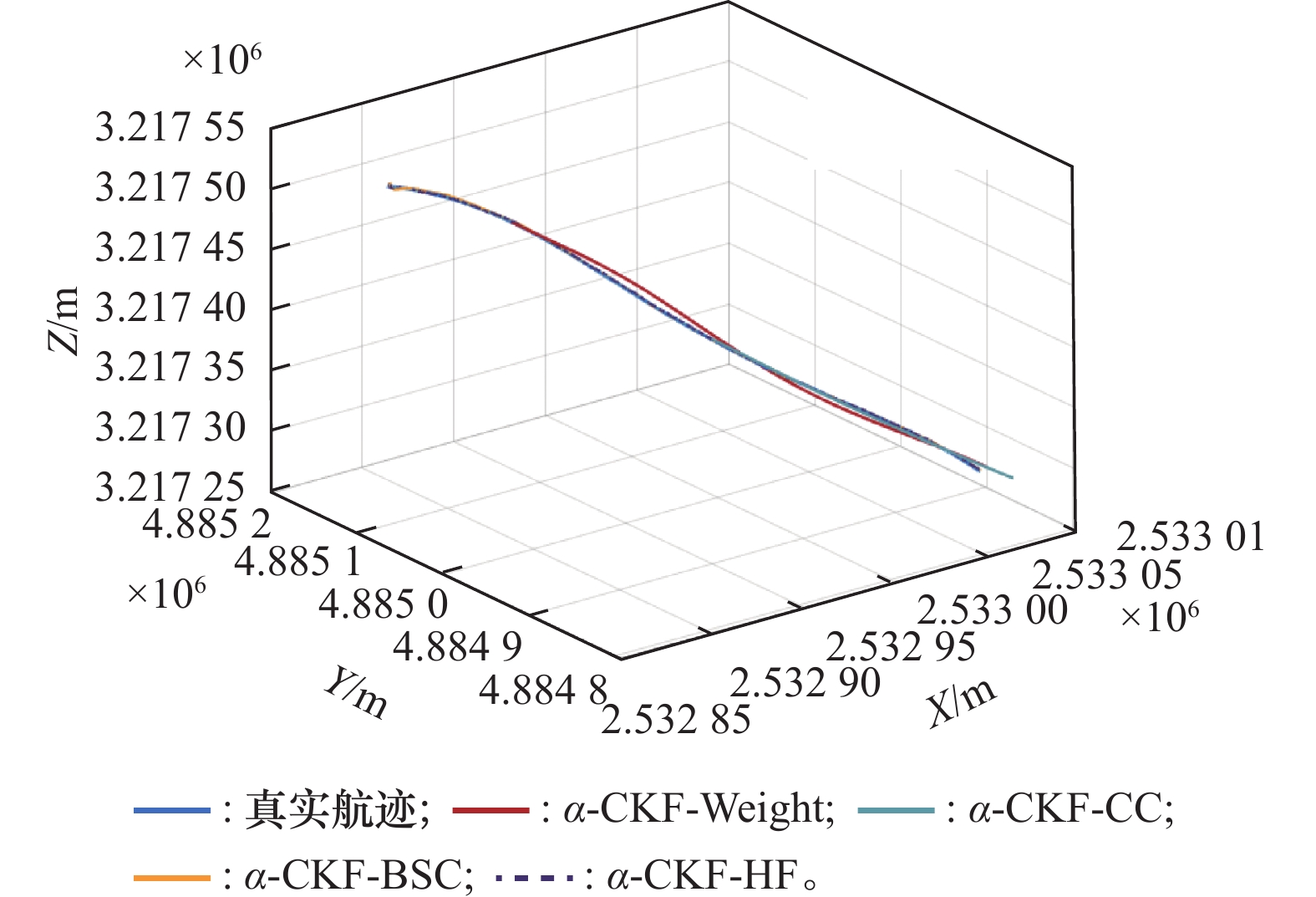
Table 8
Error record between comprehensive track generated by each fusion scheme and true value m"
| 滤波 | 融合 | |||
| Weight | CC | BSC | HF | |
| CKF | 4.83 | 3.16 | 2.91 | 2.83 |
| α-CKF | 3.75 | 2.88 | 2.67 | 2.51 |
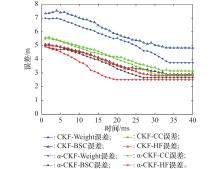
Fig.9
Comprehensive track error and time curve"
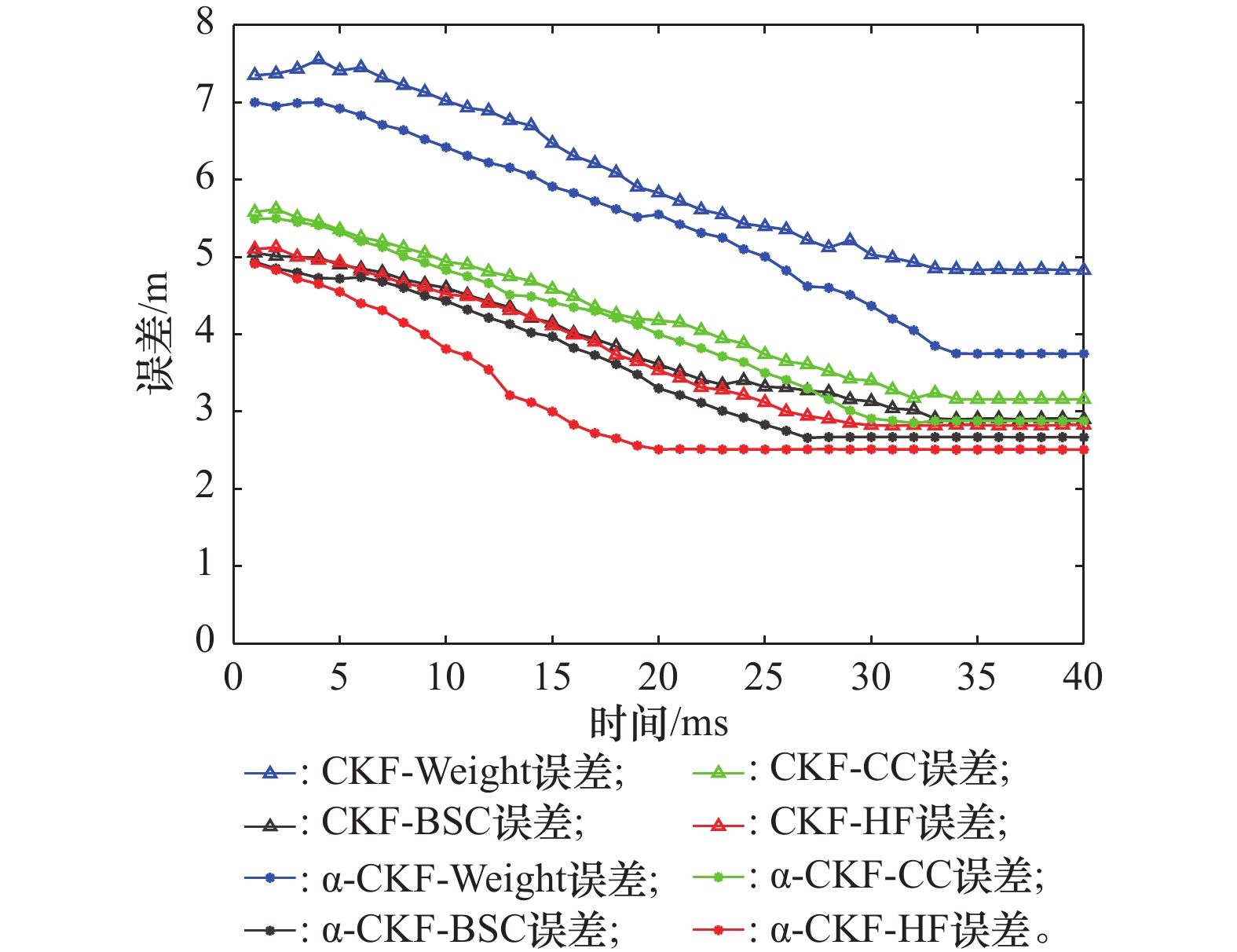
Table 9
Statistical of average error of various information sources m"
| 实验轮次 | SC-P8000 | SC-P5000+ | SC-P5000 | SC-R3000 |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 |
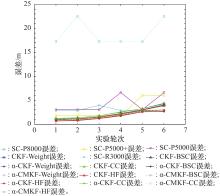
Fig.10
Diagram of error curves between various information source tracks and comprehensive track (including SC-R3000 error)"
Fig.11
Diagram of error curves between various information source track and comprehensive track (excluding SC-R3000 error)"
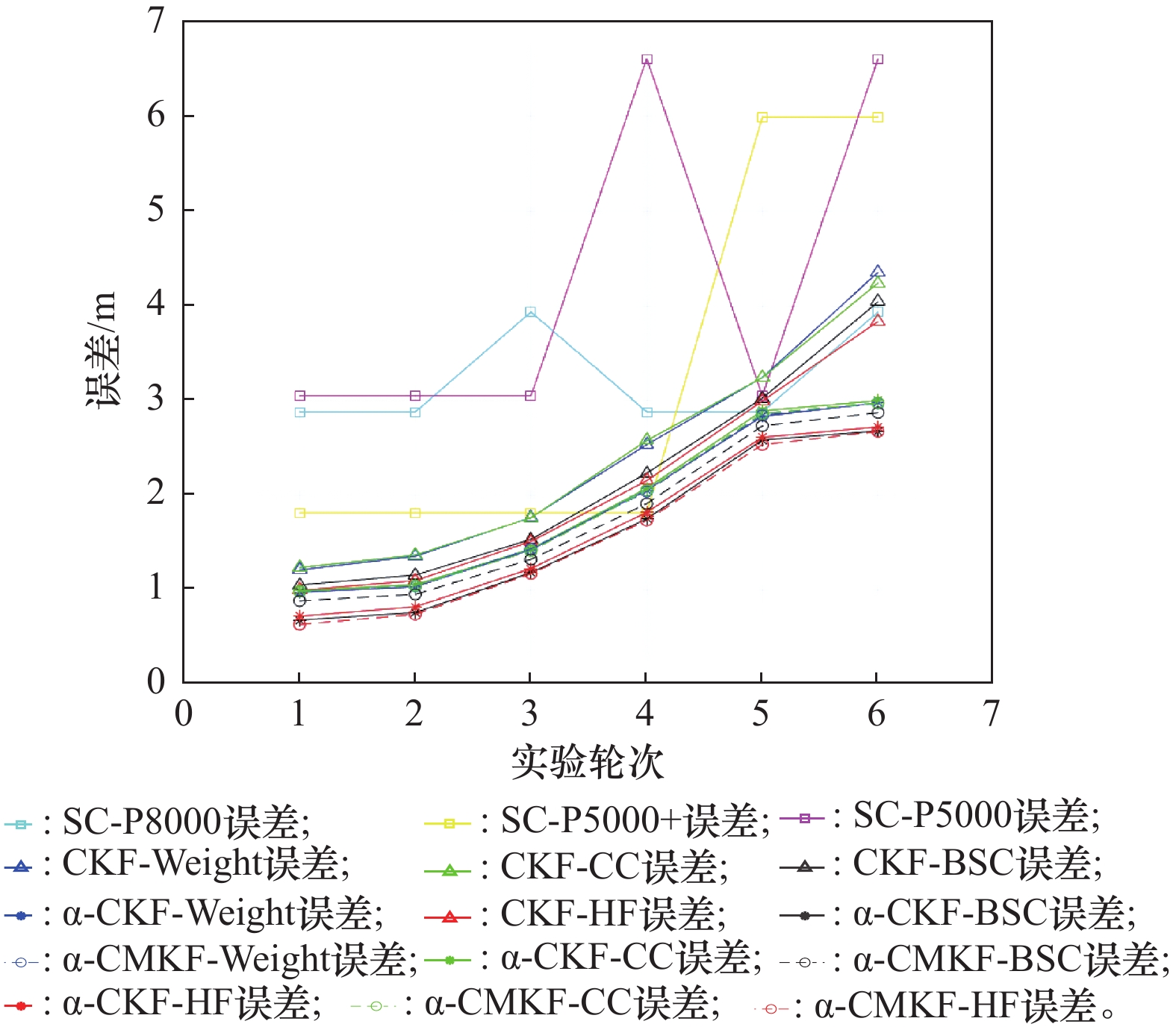
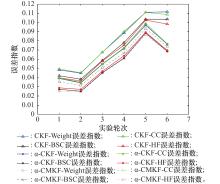
Fig.12
Curve of error indices for various algorithms"
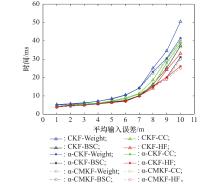
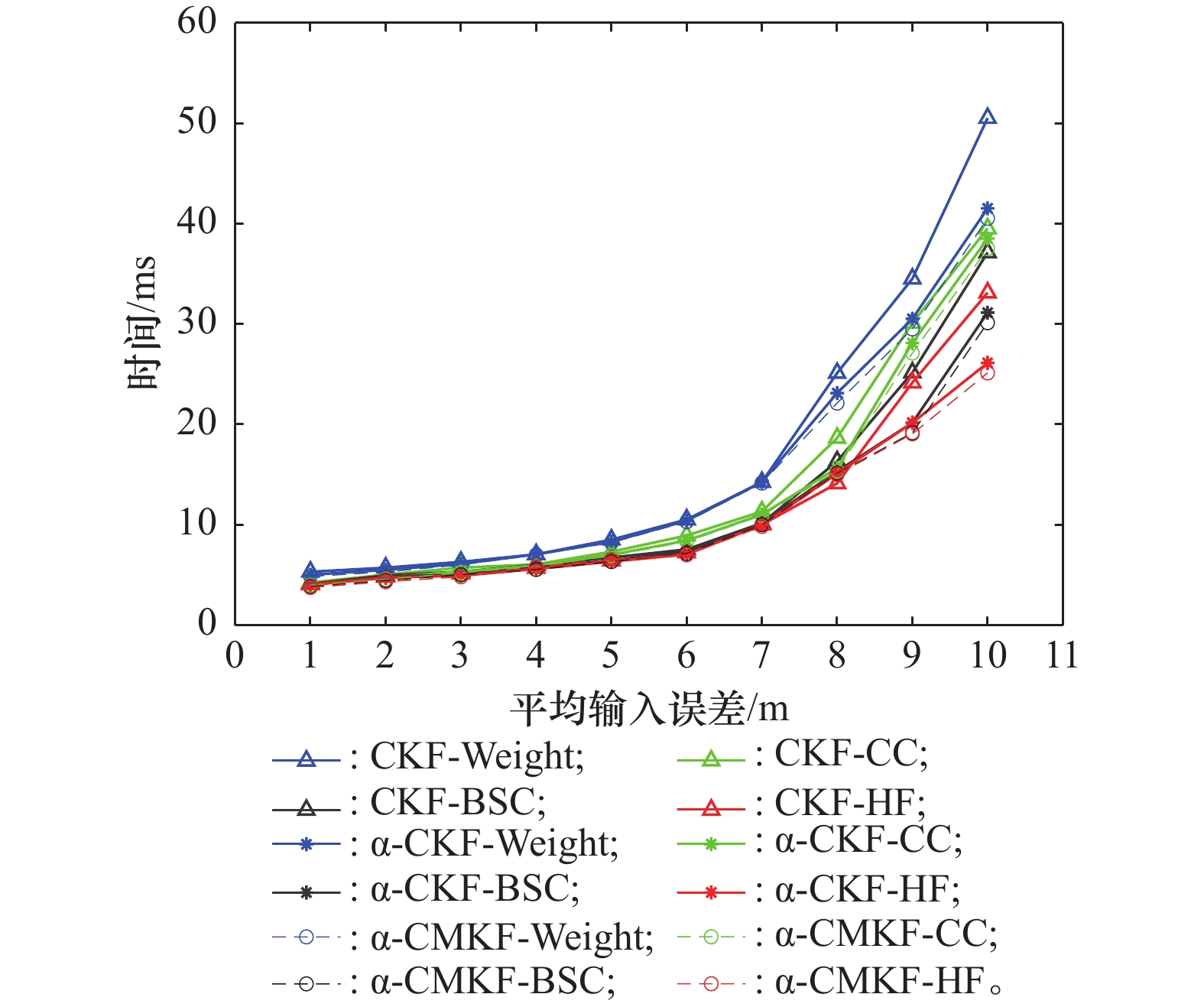
Fig.13
Convergence time and average input error curve"
| 1 |
KHANPARA M B, PATEL P B, PARMAR B N, et al. Transforming agriculture with drones: applications, challenges and implementation strategies[J]. Journal of Scientific Research and Reports, 2024, 30 (8): 792- 802.
doi: 10.9734/jsrr/2024/v30i82299 |
| 2 |
FANG Z, SAVKIN V A. Strategies for optimized UAV surveillance in various tasks and scenarios: a review[J]. Drones, 2024, 8 (5): 193.
doi: 10.3390/drones8050193 |
| 3 |
KUMAR A C, GIRIDHAR O. UAV detection multi-sensor data fusion[J]. Journal of Research in Science and Engineering, 2024, 6 (7): 6- 12.
doi: 10.53469/jrse.2024.06(07).02 |
| 4 |
CHENG L, CHAO W, YAN P. IMCN: improved modular co-attention networks for visual question answering[J]. Applied Intelligence, 2024, 54 (6): 5167- 5182.
doi: 10.1007/s10489-024-05456-4 |
| 5 |
MAHENDRA M, CHU K C, SANJEEV A, et al. Heterogeneous track-to-track fusion in 3-D using IRST sensor and air MTI radar[J]. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (6): 3062- 3079.
doi: 10.1109/TAES.2019.2898302 |
| 6 | 赵昊宸. 分布式雷达红外多传感器系统中的轨迹融合技术研究[D]. 长沙: 国防科技大学, 2017. |
| ZHAO H C. Research on trajectory fusion technology in distributed radar/infrared multi sensor systems[D]. Changsha: National University of Defense Technology, 2017. | |
| 7 | 吴静, 艾小锋, 赵锋, 等. 航迹融合中的量测协方差统一转换方法[J]. 信息对抗技术, 2023, 2 (3): 74- 84. |
| WU J, AI X F, ZHAO F, et al. Measurement covariance unified transformation method in trajectory fusion[J]. Information Adversarial Technology, 2023, 2 (3): 74- 84. | |
| 8 | XIE Z L, ZHANG Z P, CHEN J L, et al. Data-driven unsupervised anomaly detection of manufacturing processes with multi-scale prototype augmentation and multi-sensor data[J]. Journal of Manufacturing Systems, 2024, 77 (3): 26- 39. |
| 9 | WANG X, WU Z X, JIN B, et al. MDSTF: a multi-dimensional spatio-temporal feature fusion trajectory prediction model for autonomous driving[J]. Complex & Intelligent Systems, 2024, 10 (5): 7419- 7420. |
| 10 | SPADON G, KUMAR J, EDEN D, et al. Multi-path long-term vessel trajectories forecasting with probabilistic feature fusion for problem shifting[J]. Ocean Engineering, 2024, 312 (15): 138. |
| 11 | XU Z Q, GUO Y F, KUANG Y, et al. Multi-sensor distributed fusion based on cross-location for passive tracking[J]. Signal, Image and Video Processing, 2024, 18, 9441- 9449. |
| 12 |
LEE S, YUAN Z, PETRUNIN I, et al. Impact analysis of time synchronization error in airborne target tracking using a heterogeneous sensor network[J]. Drones, 2024, 8 (5): 167- 168.
doi: 10.3390/drones8050167 |
| 13 |
YI P Z, TAO W, SHI Q Z, et al. Adaptive multi-pedestrian tracking by multi-sensor: track-to-track fusion using monocular 3D detection and MMW radar[J]. Remote Sensing, 2022, 14 (8): 1837.
doi: 10.3390/rs14081837 |
| 14 | ZAREI M, CHHABRA R, MOTTAGHI M. Sequential track fusion in multi-sensor networks of unscented Kalman filters: a case of slip estimation in planetary mobile robots[J]. Acta Astronautica, 2024, 219 (2): 555- 568. |
| 15 | SHENG X L, WANG Y, MU M F, et al. A modified asynchronous sequential Kalman track fusion based on sound propagation time[J]. EURASIP Journal on Advances in Signal Processing, 2023, 3 (1): 14- 13. |
| 16 | WANG M C, LI Y, MIN L, et al. Intelligent marine area supervision based on AIS and radar fusion[J]. Ocean Engineering, 2023, 285 (2): 5- 13. |
| 17 | XIE Z L, ZHANG Z P, CHEN J L, et al. Data-driven unsupervised anomaly detection of manufacturing processes with multi-scale prototype augmentation and multi-sensor data[J]. Journal of Manufacturing Systems, 2024, 77 (4): 26- 39. |
| 18 | 邵俊伟. 一种参数自适应调整的Singer模型跟踪算法[J]. 科技信息, 2014, 15 (13): 111- 112. |
| SHAO J W. A singer model tracking algorithm with parameter adaptive adjustment[J]. Science and Technology Information, 2014, 15 (13): 111- 112. | |
| 19 | KASHANI B H. Deep attentive adaptive filter module in residual blocks for text-independent speaker verification[J]. Engineering Applications of Artificial Intelligence, 2024, 138 (A): 109312. |
| 20 | 任少伟, 王睿, 张平定. 基于机动频率自适应的目标跟踪算法[J]. 空军工程大学学报(自然科学版), 2004, (5): 32- 35. |
| REN S W, WANG R, ZHANG P D. Target tracking algorithm based on adaptive maneuvering frequency[J]. Journal of Air Force Engineering University (Natural Science Edition), 2004, (5): 32- 35. | |
| 21 | WU Z, NI J G. Diffusion random Fourier adaptive filtering algorithm based on logistic distance metric for distributed estimation[J]. Digital Signal Processing, 2024, 156 (A): 104768. |
| 22 | PADMAPRIYA R, JEYASEKAR A. CA-EBM3D-NET: a convolutional neural network combined framework for denoising with weighted alpha parameter and adaptive filtering[J]. International Journal of Information Technology, 2024, 16, 4855- 4867. |
| 23 |
ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Trans. on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 24 | WU W, JIANG J, LIU W J, et al. A sequential converted measurement Kalman filter in the ECEF coordinate system for airborne Doppler radar[J]. Aerospace Science and Technology, 2016, 51 (12): 11- 17. |
| 25 | XU L, MA P, SU X. Adaptive track association in distributed multi-sensor track fusion system[J]. ICIC Express Letters, 2011, 5 (11): 4101- 4106. |
| 26 | HYUN D, YOON H. A fusion algorithm considering error characteristics of the multi-sensor[J]. Journal of KIISE: Computer Systems and Theory, 2009, 36 (4): 274- 282. |
| 27 | WANG X, GUO R, JHA K N, et al. Multi-sensor targets data association and track fusion based on novel AWFCM[J]. International Journal of Nonlinear Sciences and Numerical Simulation, 2009, 10 (6): 811- 822. |
| 28 |
SANKETH A, KUMAR S K, VPS N, et al. Airborne multi target track to track fusion of radar and IRST for advanced multi role combat aircrafts[J]. IFAC PapersOnLine, 2022, 55 (22): 224- 229.
doi: 10.1016/j.ifacol.2023.03.038 |
| 29 |
WANG T L, ZHANG X A, YANG X L. A multiresolution adaptive grid method for solving the generalized probability density equation in stochastic dynamic analysis[J]. Acta Mechanica, 2022, 233 (5): 1911- 1940.
doi: 10.1007/s00707-022-03183-w |
| 30 | YAN H, ZHANG G T, CUI W, et al. Multi-modality hierarchical fusion network for lumbar spine segmentation with magnetic resonance images[J]. Control Theory and Technology, 2024, 22 (4): 612- 622. |
| 31 |
孔尚萍, 张海瑞, 廖选平, 等. 基于IMM-UKF的分层航迹融合算法[J]. 火力与指挥控制, 2018, 43 (2): 120- 124.
doi: 10.3969/j.issn.1002-0640.2018.02.025 |
|
KONG S P, ZHANG H R, LIAO X P, et al. Hierarchical trajectory fusion algorithm based on IMM-UKF[J]. Fire and Command Control, 2018, 43 (2): 120- 124.
doi: 10.3969/j.issn.1002-0640.2018.02.025 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||