Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (4): 1177-1184.doi: 10.12305/j.issn.1001-506X.2023.04.26
• Guidance, Navigation and Control • Previous Articles
Robust control of servo system with backlash based on new reaching law
Fangjun LI1,*, Shengjie WANG1, Junfeng LI2, Hao LI2, Chenjun CUI1
- 1. Beijing Mechanical Equipment Institute, Beijing 100854, China
2. China Changfeng Electromechanical Technology Research and Design Institute, Beijing 100854, China
-
Received:2022-01-12Online:2023-03-29Published:2023-03-28 -
Contact:Fangjun LI
CLC Number:
Cite this article
Fangjun LI, Shengjie WANG, Junfeng LI, Hao LI, Chenjun CUI. Robust control of servo system with backlash based on new reaching law[J]. Systems Engineering and Electronics, 2023, 45(4): 1177-1184.
share this article
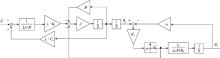
Fig.1
Block diagram of transmission part of servo system with backlash"

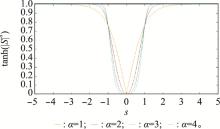
Fig.2
tanh(|S|α)function diagram"
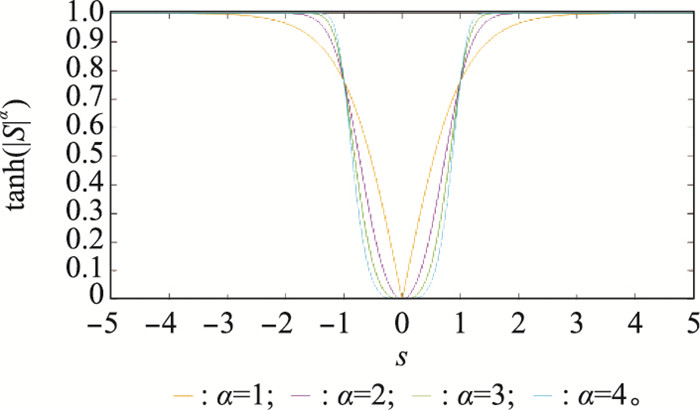
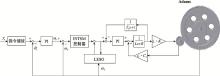
Fig.3
Joint simulation diagram"
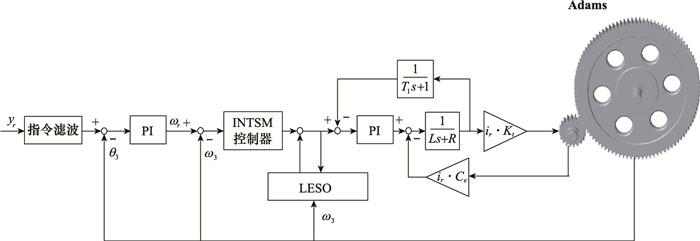
Table 1
Parameters of motor and transmission structure used in simulation"
| 参数 | 数值 |
| 定子电感L/mH | 4.25 |
| 定子电阻R/Ω | 0.26 |
| 力矩系数Kt/(N·m·A-1) | 1.066 |
| 反电势系数Ce/(V/(rad·s-1)) | 0.8 |
| 减速器减速比ir | 10 |
| 齿轮结构传动比im | 5 |
| 负载转动惯量Jm/(kg·m2) | 22.776 |
| 摩擦系数Bm/(N·m·s·rad-1) | 0.01 |
Table 2
Parameters of PID method controller"
| 参数 | 数值 |
| 位置环比例系数 | 70 |
| 速度环比例系数 | 14 |
| 速度环积分系数 | 0.1 |
| 电流环比例系数 | 0.212 |
| 电流环积分系数 | 13 |
Table 3
Parameters of exponential reaching law controller"
| 参数 | 数值 |
| 位置环比例系数 | 1.65 |
| LESO系数λ1 | 12 |
| LESO系数λ2 | 800 |
| INTSM系数β | 1 |
| INTSM系数p/q | 5/3 |
| INTSM系数D | 1 000 |
| INTSM系数k | 1 000 |
Table 4
Parameters of new reaching law controller"
| 参数 | 数值 |
| 位置环比例系数 | 1.65 |
| LESO系数λ1 | 12 |
| LESO系数λ2 | 800 |
| INTSM系数β | 1 |
| INTSM系数p/q | 5/3 |
| INTSM系数D | 1 000 |
| INTSM系数k | 1 000 |
| INTSM系数α | 7 |
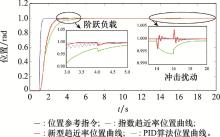
Fig.4
Position curve under impact disturbance torque"
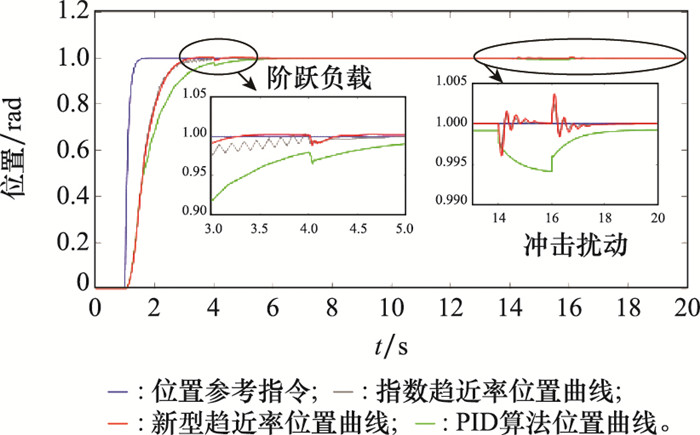
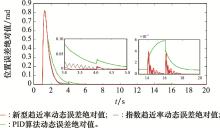
Fig.5
Position error curve under impact disturbance torque"
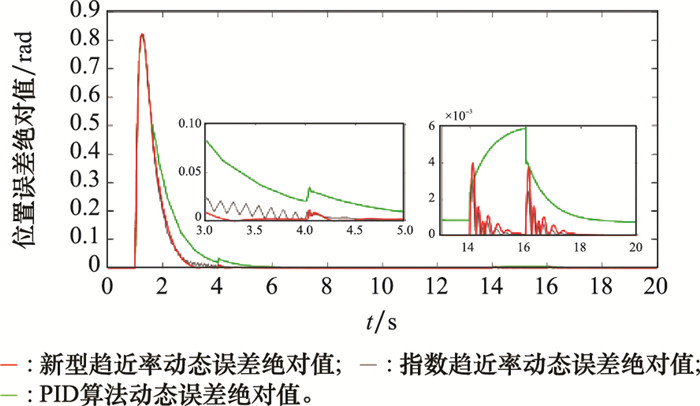
Fig.6
q-axis current curve under constant disturbance torque"
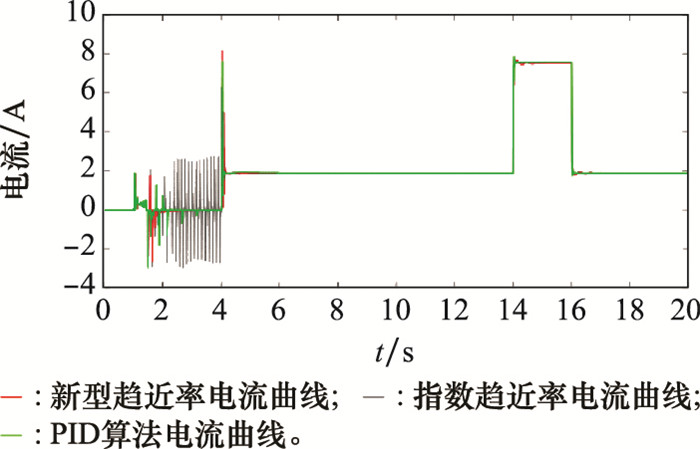

Fig.7
Position curve under sinusoidal disturbance torque"
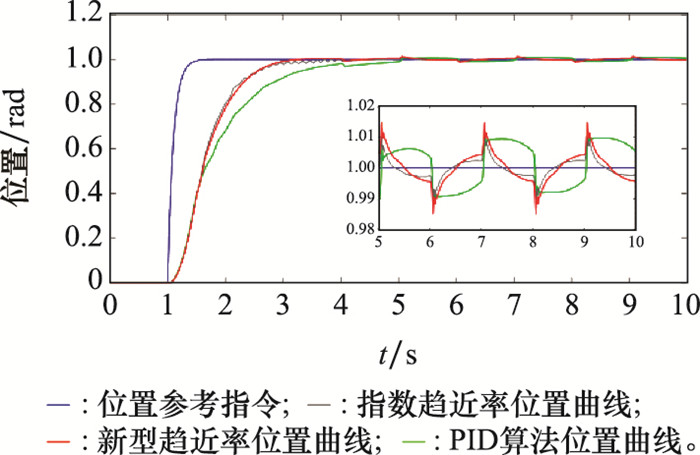
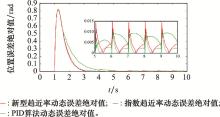
Fig.8
Position error curve under sinusoidal disturbance torque"
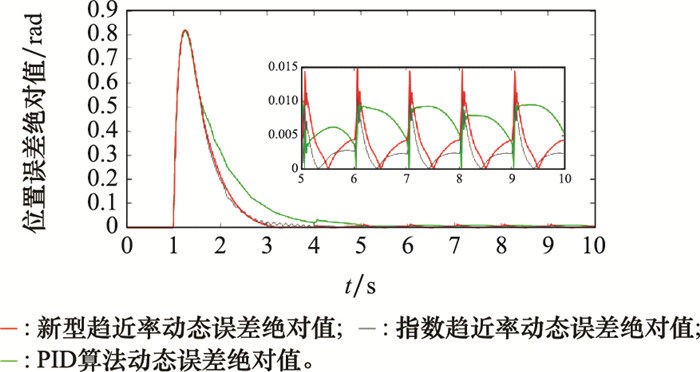
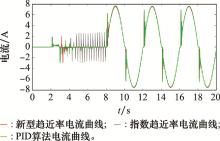
Fig.9
q-axis current curve under sinusoidal disturbance torque"

Table 5
Simulation experiment results of impact disturbance torque"
| 控制策略 | 加载过程位置偏差最大值/rad | 撤去时位置偏差最大值/rad | 误差减小至0.1%所用时间/s |
| PID方法 | 0.005 1 | 0.002 | 3.92 |
| 指数趋近率控制策略 | 0.002 8 | 0.003 | 0.50 |
| 新型趋近率控制策略 | 0.003 7 | 0.004 | 0.69 |
Table 6
Simulation experiment results of sinusoidal disturbance torque"
| 控制策略 | 位置偏差最大值/rad | 误差减小至0.1%所用时间/s |
| PID方法 | 0.012 | 1.040 |
| 指数趋近率控制策略 | 0.013 | 0.335 |
| 新型趋近率控制策略 | 0.015 | 0.459 |
| 1 | 付东学, 赵希梅. 永磁直线同步电机自适应反推全局快速终端滑模控制[J]. 电工技术学报, 2020, 35 (8): 1634- 1641. |
| FU D X , ZHAO X M . Adaptive backstepping global fast terminal sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35 (8): 1634- 1641. | |
| 2 | 李玉霞, 王帅, 王建立, 等. 地平主焦点式大视场望远镜的双电机消旋系统[J]. 光学精密工程, 2021, 29 (4): 749- 762. |
| LI Y X , WANG S , WANG J L , et al. Dual-motor de-rotator system of prime focus alt-azimuth telescope with large field of view[J]. Optics and Precision Engineering, 2021, 29 (4): 749- 762. | |
| 3 |
WANG Q W , WANG G L , ZHAO N N , et al. An impedance model-based multiparameter identification method of PMSM for both offline and online conditions[J]. IEEE Trans.on Power Electronics, 2021, 36 (1): 727- 738.
doi: 10.1109/TPEL.2020.3000896 |
| 4 |
QU L Z , QIAO W , QU L Y . An enhanced linear active disturbance rejection rotor position sensorless control for permanent magnet synchronous motors[J]. IEEE Trans.on Power Electronics, 2020, 35 (6): 6175- 6184.
doi: 10.1109/TPEL.2019.2953162 |
| 5 |
YANG Q C , LIU T , WU X , et al. A planetary gear reducer backlash identification based on servo motor current signal and optimized fisher discriminant analysis[J]. ISA Transactions, 2021, 112, 350- 362.
doi: 10.1016/j.isatra.2020.12.016 |
| 6 |
GHANNADI B , SHARIF R R , MCPHEE J . A modified homotopy optimization for parameter identification in dynamic systems with backlash discontinuity[J]. Nonlinear Dynamics, 2019, 95, 57- 72.
doi: 10.1007/s11071-018-4550-1 |
| 7 |
LYU W S , WANG F . Adaptive fuzzy finite-time control for uncertain nonlinear systems with asymmetric actuator backlash[J]. International Journal of Fuzzy Systems, 2019, 21, 50- 59.
doi: 10.1007/s40815-018-0532-1 |
| 8 | 田福庆, 姜尚, 梁伟阁. 含齿隙弹载舵机的全局反步模糊自适应控制[J]. 自动化学报, 2019, 45 (6): 1177- 1185. |
| TIAN F Q , JIANG S , LIANG W G . Global backstepping fuzzy adaptive control for ammunition actuator with backlash[J]. ACTA Automatica Sinica, 2019, 45 (6): 1177- 1185. | |
| 9 |
SEBASTIAN V , MARIO P . Time-domain identification method for detecting mechanical backlash in electrical drives[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (2): 568- 573.
doi: 10.1109/TIE.2008.2003498 |
| 10 |
HAN Y , LIU C , WU J H . Backlash identification for PMSM servo system based on relay feedback[J]. Nonlinear Dynamics, 2016, 84, 2363- 2375.
doi: 10.1007/s11071-016-2650-3 |
| 11 |
RUDERMAN M , FRIDMAN L . Model-free sliding-mode-based detection and estimation of backlash in drives with single encoder[J]. IEEE Trans.on Control Systems Technology, 2021, 29 (2): 812- 817.
doi: 10.1109/TCST.2019.2956914 |
| 12 |
MARGIELEWICZ J , GSKA D , LITAK G . Modelling of gear backlash[J]. Nonlinear Dynamics, 2019, 97, 355- 368.
doi: 10.1007/s11071-019-04973-z |
| 13 |
DIMITRIOS P , MOGENS B , HANS H N , et al. Robust backlash estimation for industrial drive-train systems-theory and validation[J]. IEEE Trans.on Control Systems Technology, 2019, 27 (5): 1847- 1861.
doi: 10.1109/TCST.2018.2837642 |
| 14 | 韩崇伟, 彭超, 石志翔, 等. 基于干扰抑制的含齿隙伺服系统鲁棒控制方法[J]. 系统仿真学报, 2018, 30 (2): 691- 698. |
| HAN C W , PENG C , SHI Z X , et al. Disturbance rejection based robust control approach for servo system with backlash[J]. Journal of System Simulation, 2018, 30 (2): 691- 698. | |
| 15 |
ZHU P K , CHEN Y , LI M , et al. Fractional-order sliding mode position tracking control for servo system with disturbance[J]. ISA Transactions, 2020, 105, 269- 277.
doi: 10.1016/j.isatra.2020.05.032 |
| 16 |
XIE Y L , ZHANG X L , MENG W , et al. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot[J]. ISA Transactions, 2021, 108, 282- 294.
doi: 10.1016/j.isatra.2020.08.025 |
| 17 | MA H F , LIU C , LIU Y , et al. Sliding mode control for uncertain discrete time systems based on fractional order reaching law[J]. IET Control Theory & Applications, 2019, 13 (13): 1963- 1970. |
| 18 |
XU W , DIAN R J , LIU Y , et al. Robust flux estimation method for linear induction motors based on improved extended state observers[J]. IEEE Trans.on Power Electronics, 2019, 34 (5): 4628- 4640.
doi: 10.1109/TPEL.2018.2865800 |
| 19 |
LIU C Q , LUO G Z , DUAN X L , et al. Adaptive LADRC-based disturbance rejection method for electromechanical servo system[J]. IEEE Trans.on Industry Applications, 2020, 56 (1): 876- 889.
doi: 10.1109/TIA.2019.2955664 |
| 20 |
LIU Z G , WANG Y Q , LIU S , et al. An approach to suppress low-frequency oscillation by combining extended state observer with model predictive control of EMUS rectifier[J]. IEEE Trans.on Power Electronics, 2019, 34 (10): 10282- 10297.
doi: 10.1109/TPEL.2019.2893491 |
| 21 | LI G F , WU Y J , XU P Y . An observer-based fixed-time position tracking strategy for DC torque motor systems[J]. Mechanical Systems and Signal Processing, 2020, 142 (1): 106774. |
| 22 | 孟思华, 王尧尧, 陈柏, 等. 基于时延估计的绳驱动飞行机械臂模糊非奇异终端滑模飞行控制[J]. 中南大学学报(自然科学版), 2021, 52 (10): 3465- 3474. |
| MENG S H , WANG Y Y , CHEN B , et al. Fuzzy nonsingular terminal sliding mode flying control of cable-driven flying manipulators based on time-delay estimation[J]. Journal of Central South University, 2021, 52 (10): 3465- 3474. | |
| 23 |
ABADI A , AMRAOUI A E , MEKKI H , et al. Robust tracking control of quadrotor based on flatness and active disturbance rejection control[J]. IET Control Theory and Applications, 2020, 14 (8): 1057- 1068.
doi: 10.1049/iet-cta.2019.1363 |
| 24 |
XU Z , ZHANG T R , BAO Y L , et al. A nonlinear extended state observer for rotor position and speed estimation for sensorless IPMSM drives[J]. IEEE Trans.on Power Electronics, 2020, 35 (1): 733- 743.
doi: 10.1109/TPEL.2019.2914119 |
| 25 |
WANG C W , ZHANG Z Y , WANG H , et al. Disturbance observer-based output feedback control of hydraulic servo system considering mismatched uncertainties and internal pressure dynamics stability[J]. IET Control Theory and Applications, 2020, 14 (8): 1046- 1056.
doi: 10.1049/iet-cta.2019.0346 |
| 26 | QU L Z , QIAO W , QU L Y . Active-disturbance-rejection-based sliding-mode current control for permanent-magnet synchronous motors[J]. IEEE Trans.on Power Electronics, 2021, 36 (1): 751- 760. |
| 27 | LIU X D , YU H S . Continuous adaptive integral-type sliding mode control based on disturbance observer for PMSM drives[J]. Nonlinear Dynamics, 2021, 104, 1429- 1441. |
| 28 | WANG Y Q , FENG Y T , ZHANG X G , et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Trans.on Power Electronics, 2020, 35 (4): 4117- 4126. |
| 29 | 李思远, 陈子坤, 梁曦, 等. 带有齿隙的空间机械臂动力学仿真与试验设计[J]. 测试技术学报, 2017, 31 (1): 17- 23. |
| LI S Y , CHEN Z K , LIANG X , et al. Dynamical simulation and experimental design of space manipulator with backlashes[J]. Journal of Test and Measurement Technology, 2017, 31 (1): 17- 23. | |
| 30 | 蒋潇蓉, 郁家耀, 周君涛, 等. 基于ADAMS的某无后坐炮发射动态仿真分析[J]. 兵器装备工程学报, 2020, 41 (8): 17- 21. |
| JIANG X R , YU J Y , ZHOU J T , et al. Dynamic simulation analysis of a recoilless gun launching based on ADAMS[J]. Journal of Ordnance Equipment Engineering, 2020, 41 (8): 17- 21. | |
| 31 | 周凯红, 郭玉田, 黄思敏. 基于Adams和Matlab的非圆锥齿轮传动机构仿真研究[J]. 机电工程, 2022, 39 (1): 40- 46. |
| ZHOU K H , GUO Y T , HUANG S M . Simulation of non-bevel gear transmission mechanism based on Adams and Matlab[J]. Journal of Mechanical & Electrical Engineering, 2022, 39 (1): 40- 46. |
| [1] | Haixiang XU, Cong HU, Wenzhao YU, Guoquan YAO. Variable depth control of buoyancy regulated UUV with input constraints [J]. Systems Engineering and Electronics, 2022, 44(11): 3496-3504. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||