Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (3): 806-813.doi: 10.12305/j.issn.1001-506X.2023.03.22
• Guidance, Navigation and Control • Previous Articles Next Articles
Multi-constraint multi-input interceptor integrated attitude and trajectory compound control
Qian PENG1, Jianguo GUO1,*, Zongyi GUO1, Guoqing WANG2
- 1. Institute of Precision Guidance and Control, School of Aerospace, Northwestern Polytechnical University, Xi'an 710072, China
2. Research and Development Department, China Academy of Launch Vehicle Technology, Beijing 100076, China
-
Received:2021-11-22Online:2023-02-25Published:2023-03-09 -
Contact:Jianguo GUO
CLC Number:
Cite this article
Qian PENG, Jianguo GUO, Zongyi GUO, Guoqing WANG. Multi-constraint multi-input interceptor integrated attitude and trajectory compound control[J]. Systems Engineering and Electronics, 2023, 45(3): 806-813.
share this article
Fig.1
Schematic diagram of interceptor-target relative motion"
Table 1
Interceptor collision status"
| 控制器 | 脱靶量/m | 拦截时间/s | 交会角/(°) |
| IGC-SMC | 0.000 2 | 10.13 | -0.001 7 |
| BC-SMC | 0.011 4 | 10.17 | -0.000 1 |

Fig.2
Interceptor's trajectory under the control of IGC-SMC and BC-SMC"

Fig.3
Curves of line-of-sight orientation angle under the control of IGC-SMC and BC-SMC"

Fig.4
IGC-SMC and BC-SMC control input curves"
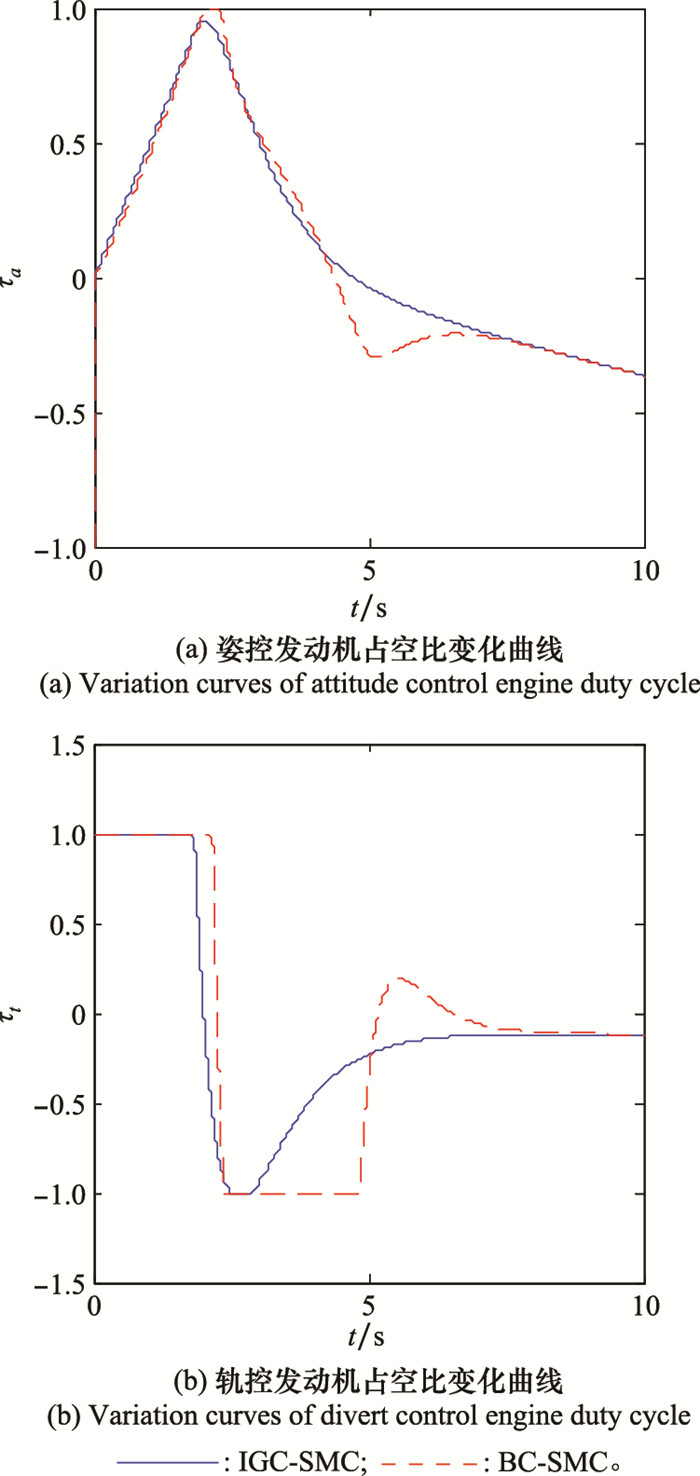
Table 2
Impulse required by attitude and divert control engine kN·s"
| 控制器 | 姿控发动机冲量 | 轨控发动机冲量 |
| IGC-SMC | 9.718 | 89.18 |
| BC-SMC | 10.840 | 107.50 |
Table 3
Interceptor's collision status"
| 控制器 | 脱靶量/(×10-4 m) | 交会角/(°) |
| EDO-CSMC | 5.83 | -0.001 6 |
| CSMC | 0.43 | -0.006 3 |
| EDO-SMC | 2.25 | -0.001 7 |
| SMC | 6.82 | -0.145 3 |
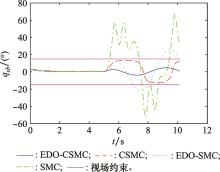
Fig.5
Variation curves of body line-of-sight angle"
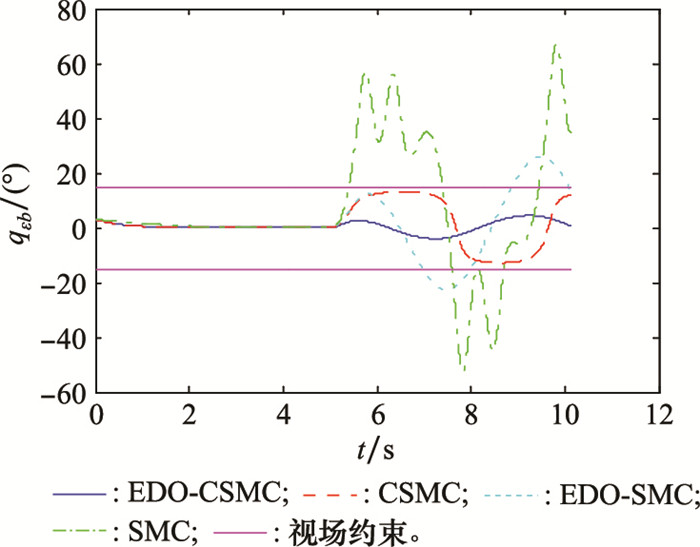

Fig.6
Monte Carlo test result of body line-of-sight angle"
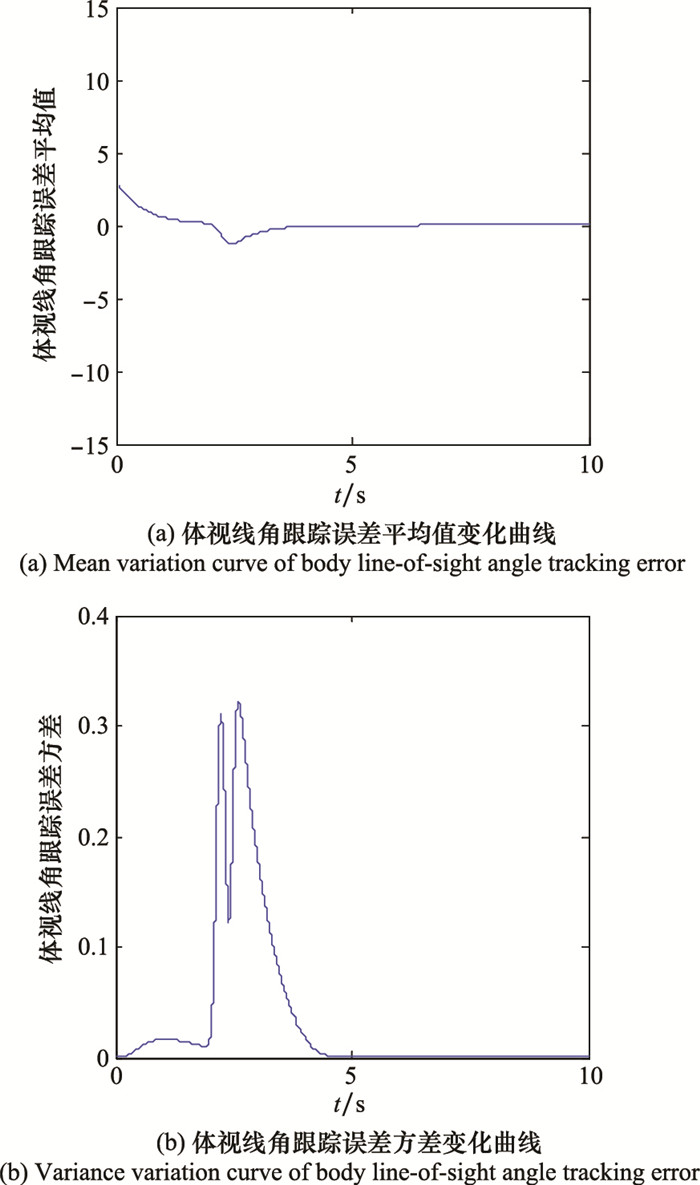

Fig.7
Monte Carlo test result of miss distance"
Fig.8
Monte Carlo test result of impact angle"
| 1 |
NA H , LEE J . Optimal arrangement of missile defense systems considering kill probability[J]. IEEE Trans.on Aerospace and Electronic System, 2020, 56 (2): 972- 983.
doi: 10.1109/TAES.2019.2923331 |
| 2 | 姚郁, 郑天宇, 贺风华, 等. 飞行器末制导中的几个热点问题与挑战[J]. 航空学报, 2015, 36 (8): 2696- 2716. |
| YAO Y , ZHENG T Y , HE F H , et al. Several hot issues and challenges in terminal guidance of flight vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36 (8): 2696- 2716. | |
| 3 |
REISNER D , SHIMA T . Optimal guidance-to-collision law for an accelerating exoatmospheric interceptor missile[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (6): 1695- 1708.
doi: 10.2514/1.61258 |
| 4 |
ZHANG D H , MA P , DU Y Q , et al. Integral barrier Lyapunov function-based three-dimensional low-order integrated guidance and control design with seeker's field-of-view constraint[J]. Aerospace Science and Technology, 2021, 116, 106886.
doi: 10.1016/j.ast.2021.106886 |
| 5 | ZHAO B , XU S Y , GUO J G , et al. Integrated strapdown missile guidance and control based on neural network disturbance observer[J]. Aerospace Science and Technology, 2019, (84): 170- 181. |
| 6 |
WANG Y D , WANG J , HE S M , et al. Optimal guidance with active observability enhancement for scale factor error estimation of strapdown seeker[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (6): 4347- 4362.
doi: 10.1109/TAES.2021.3096870 |
| 7 | XIE J W, CHEN W C. Switching logic design for divert and attitude control system of exoatmospheric kill vehicle[C]//Proc. of the IEEE 8th International Conference on CIS & RAM, 2017: 194-200. |
| 8 |
ASHRAFIUON H . Guidance and attitude control of unstable rigid bodies with single-use thrusters[J]. IEEE Trans.on Control Systems Technology, 2017, 25 (2): 401- 413.
doi: 10.1109/TCST.2016.2572165 |
| 9 | 张烽. 航天器近距离运动的鲁棒姿轨联合控制[D]. 哈尔滨: 哈尔滨工业大学, 2013. |
| ZHANG F. Robust integrated attitude and orbit control for proximity motion of spacecraft[D]. Harbin: Harbin Institute of Technology, 2013. | |
| 10 | 张庆展, 靳永强, 康志宇, 等. 服务航天器超近程逼近目标的相对姿轨耦合控制[J]. 系统工程与电子技术, 2015, 37 (1): 141- 147. |
| ZHANG Q Z , JIN Y Q , KANG Z Y , et al. Coupled control of relative position and attitude for servicing spacecraft approach-ing the target in close proximity[J]. Systems Engineering and Electronics, 2015, 37 (1): 141- 147. | |
| 11 |
SUN L , HUO W . Robust adaptive relative position tracking and attitude synchronization for spacecraft rendezvous[J]. Ae-rospace Science and Technology, 2015, 41, 28- 35.
doi: 10.1016/j.ast.2014.11.013 |
| 12 |
TOURNES C , SHTESSEL Y , SHKOLNIKOV I . Missile controlled by lift and divert thrusters using nonlinear dynamic sliding manifolds[J]. Journal of Guidance, Control, and Dyna-mics, 2006, 29 (3): 617- 625.
doi: 10.2514/1.15486 |
| 13 |
WANG P , ZHANG X B , ZHU J H . Integrated missile gui-dance and control: a novel explicit reference governor using a disturbance observer[J]. IEEE Trans.on Industrial Electro-nics, 2019, 66 (7): 5487- 5496.
doi: 10.1109/TIE.2018.2868300 |
| 14 |
SONG H T , ZHANG T . Fast robust integrated guidance and control design of interceptors[J]. IEEE Trans.on Control Systems Technology, 2016, 24 (1): 349- 356.
doi: 10.1109/TCST.2015.2431641 |
| 15 | 安通, 王鹏, 王建华, 等. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44 (3): 956- 966. |
| AN T , WANG P , WANG J H , et al. Integrated guidance and control schemes based on dynamic surface control method for flexible hypersonic vehicles[J]. Systems Engineering and Electronics, 2022, 44 (3): 956- 966. | |
| 16 |
COSTANDIN M , DOBRA P . Polynomial trajectory generation and tracking for linear systems[J]. International Journal of Control, 2021, 94 (7): 1893- 1902.
doi: 10.1080/00207179.2019.1684565 |
| 17 |
CHANG Y T . Adaptive sliding mode control of multi-input nonlinear systems with perturbations to achieve asymptotical stability[J]. IEEE Trans.on Automatic Control, 2009, 54 (12): 2863- 2869.
doi: 10.1109/TAC.2009.2033748 |
| 18 |
TAO C W , TAUR J S , CHANG Y H , et al. A novel fuzzy-sliding and fuzzy-integral-sliding controller for the twin-rotor multi-input-multi-output system[J]. IEEE Trans.on Fuzzy Systems, 2010, 18 (5): 893- 905.
doi: 10.1109/TFUZZ.2010.2051447 |
| 19 |
KIM H G , KIM H J . Field-of-view constrained guidance law for a maneuvering target with impact angle control[J]. IEEE Trans.on Aerospace and Electronic Systems, 2020, 56 (6): 4974- 4983.
doi: 10.1109/TAES.2020.2996306 |
| 20 |
KIM H G , LEE J Y , KIM H J , et al. Look-angle-shaping guidance law for impact angle and time control with field-of-view constraint[J]. IEEE Trans.on Aerospace and Electronic Systems, 2020, 56 (2): 1602- 1612.
doi: 10.1109/TAES.2019.2924175 |
| 21 | KUMAR S R , MUKHERJEE D . Three-dimensional nonsingular impact time guidance with limited field-of-view[J]. IEEE Trans.on Control Systems Technology, 2021, 30 (4): 1448- 1459. |
| 22 |
LIU W K , WEI Y Y , DUAN G R . Barrier Lyapunov function-based integrated guidance and control with input saturation and state constraints[J]. Aerospace Science and Technology, 2019, 84, 845- 855.
doi: 10.1016/j.ast.2018.11.019 |
| 23 |
CHEN K . Full state constrained stochastic adaptive integrated gui-dance and control for STT missiles with non-affine aerodynamic characteristics[J]. Information Sciences, 2020, 529, 42- 58.
doi: 10.1016/j.ins.2020.03.061 |
| 24 |
PENG Q , GUO J G , ZHOU J . Integrated guidance and control system design for laser beam riding missiles with relative position constraints[J]. Aerospace Science and Technology, 2020, 98, 105693.
doi: 10.1016/j.ast.2020.105693 |
| 25 | ZHANG W J , FU S N , LI W , et al. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 168- 184. |
| 26 | GUO J G , PENG Q , GUO Z Y . SMC-based integrated guidance and control for beam riding missiles with limited LBPU[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (5): 2969- 2978. |
| 27 | 郭建国, 张添保, 周军, 等. 可重复使用飞行器归一化复合控制系统设计[J]. 宇航学报, 2016, 37 (6): 639- 645. |
| GUO J G , ZHANG T B , ZHOU J , et al. Compound control system design for RLV based on normalization method[J]. Journal of Astronautics, 2016, 37 (6): 639- 645. | |
| 28 | AN H , LIU J X , WANG C H , et al. Disturbance observer-based antiwindup control for air-breathing hypersonic vehicles[J]. IEEE Trans.on Industrial Electronics, 2016, 65 (5): 3038- 3049. |
| 29 | GINOYA D , SHENDGE P D , PHADKE S B . Sliding mode control for mismatched uncertain systems using an extended disturbance observer[J]. IEEE Trans.on Industrial Electro-nics, 2014, 61 (4): 1983- 1992. |
| 30 | ZHANG T , LI J , LI W M , et al. Prescribed performance neural control to guarantee tracking quality for near space kinetic kill vehicle[J]. Journal of Systems Engineering and Electro-nics, 2019, 30 (3): 573- 586. |
| 31 | ZHENG T Y , YAO Y , HE F H , et al. Integrated guidance and control design of a flight vehicle with side-window detection[J]. Chinese Journal of Aeronautics, 2018, 31 (4): 749- 764. |
| 32 | SHIN H S , TSOURDOS A , LI K B . A new three-dimensional sliding mode guidance law variation with finite time convergence[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (5): 2221- 2232. |
| [1] | Shang JIANG, Bo WEI, Weige LIANG, Dongyan SUN, Jinjun LI, Ye MA. Integrated guidance and control design method with multiple constraints and backlash [J]. Systems Engineering and Electronics, 2022, 44(4): 1318-1328. |
| [2] | Tong AN, Peng WANG, Jianhua WANG, Guojian TANG, Yulong PAN, Haishan CHEN. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles [J]. Systems Engineering and Electronics, 2022, 44(3): 956-966. |
| [3] | ZHAO Kun, CAO Dengqing, HUANG Wenhu. Integrated design of maneuver, guidance and control for penetration missile [J]. Systems Engineering and Electronics, 2018, 40(9): 2040-2047. |
| [4] | XIA Chuan, DONG Chaoyang, WANG Qing, CHENG Haoyu. Adaptive integrated guidance and control backstepping sliding mode design for blended control missile#br# [J]. Systems Engineering and Electronics, 2018, 40(10): 2325-2333. |
| [5] | QI Hui1, ZHANG Ze1, HAN Pengxin2, XU Jiangtao1, ZHANG Dewei1. Integrated design of missile guidance and control based onbackstepping and sliding mode control [J]. Systems Engineering and Electronics, 2016, 38(3): 618-623. |
| [6] | DENG Zhi-hong, CAI Shan-bo, WANG Bo, FU Meng-yin. Compound rotation control algorithm for rotational INS [J]. Systems Engineering and Electronics, 2016, 38(11): 2610-2616. |
| [7] | DONG Chao-yang, CHENG Hao-yu, WANG Qing. Backstepping sliding mode control for integrated guidance and#br# control design based on active disturbance rejection [J]. Systems Engineering and Electronics, 2015, 37(7): 1604-1610. |
| [8] | WANG Xiao-fang, ZHENG Yi-yu, LIN Hai. 4D integrated guidance and control law for missiles cooperative engagement [J]. Systems Engineering and Electronics, 2015, 37(4): 874-881. |
| [9] | ZOU Xin-guang, ZHOU Di, DU Run-le, LIU Jia-qi. Active defense exo-atmospheric adaptive sliding mode guidance law in three dimensions [J]. Systems Engineering and Electronics, 2015, 37(2): 365-371. |
| [10] | HAN Wei,TANG Zi-yue,ZHU Zhen-bo. Target tracking method using bearing information of ESM in Doppler blind zone [J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1650-1656. |
| [11] | GAO Feng ,TANG Sheng-jing ,GUO Jie ,SHI Jiao . Compound control allocation strategy design of dual aero/ thrust vector flight vehicle based on different flight phases [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1249-1255. |
| [12] | YIN Yong-xin1,SHI Wen1,YANG Ming2. Integrated guidance and control based on dynamic inverse and extended state observer method [J]. Journal of Systems Engineering and Electronics, 2011, 33(6): 1342-1345. |
| [13] | ZHU Zhi-bin, WANG Yan, CHEN Xing-lin. Research on numerical algorithms for nonlinear predictive control problems based on segmented state constraints [J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1436-1440. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||