Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (12): 3738-3746.doi: 10.12305/j.issn.1001-506X.2022.12.18
• Systems Engineering • Previous Articles Next Articles
Cooperative air defense task planning of networked multi-sensor-multi-weapon
Chen DONG1, Yixian SHUAI1, Jinpeng ZHOU1, Peng LAI1, Xianlei CHENG2,*
- 1. Shanghai Institute of Electromechanical Engineering, Shanghai 201109, China
2. Institute of Systems Engineering, Academy of Military Sciences, Beijing 100101, China
-
Received:2021-06-18Online:2022-11-14Published:2022-11-24 -
Contact:Xianlei CHENG
CLC Number:
Cite this article
Chen DONG, Yixian SHUAI, Jinpeng ZHOU, Peng LAI, Xianlei CHENG. Cooperative air defense task planning of networked multi-sensor-multi-weapon[J]. Systems Engineering and Electronics, 2022, 44(12): 3738-3746.
share this article
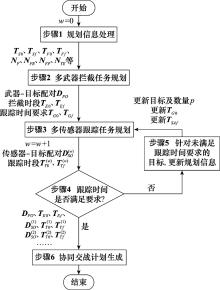
Fig.1
Flowchart of the algorithm"
Table 1
Codes of platforms, sensors and weapons in scenario 1"
| 作战平台 | 平台武器 | 平台传感器 |
| 驱逐舰1 | W1 | 静默 |
| 驱逐舰2 | W2 | 静默 |
| 驱逐舰3 | W3 | 静默 |
| 预警机 | - | S1~S20 |
Table 2
Interception time of weapons (scenario 1) s"
| 平台武器 | T1 | T2 | T3 | T4 | T5 | T6 |
| W1 | 50~120 | 60~130 | 90~240 | 100~250 | - | - |
| W2 | 80~200 | 90~210 | 55~150 | 65~160 | 100~230 | 110~240 |
| W3 | - | - | 65~130 | 75~140 | 75~190 | 85~200 |
Table 3
Interception opportunities of weapons (scenario 1)"
| 平台武器 | T1 | T2 | T3 | T4 | T5 | T6 |
| W1 | 3 | 3 | 7 | 7 | 0 | 0 |
| W2 | 6 | 6 | 4 | 4 | 6 | 6 |
| W3 | 0 | 0 | 3 | 3 | 5 | 5 |
Fig.2
Planning result in scenario 1 (optimized interception time)"
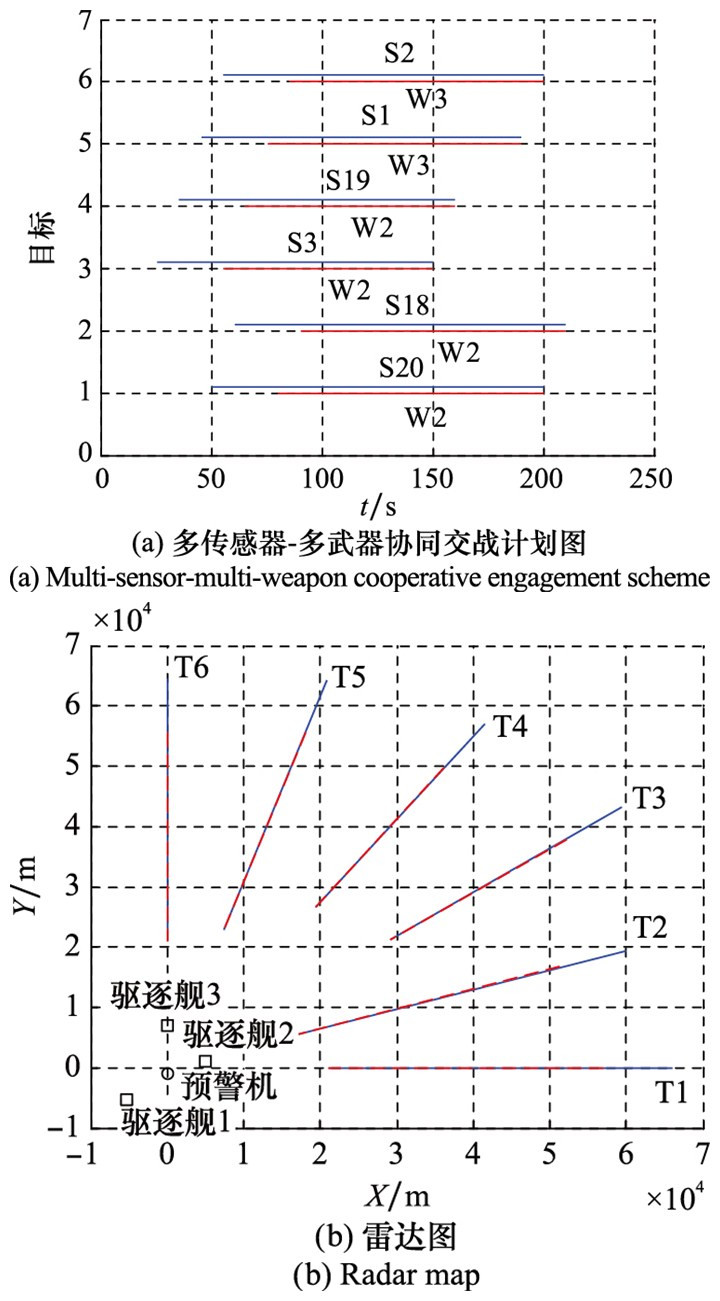
Table 4
Cooperative engagement scheme in scenario 1"
| 作战平台 | 跟踪任务 | 拦截任务 |
| 驱逐舰2 | - | T1: 80~200 T2: 90~210 T3: 55~150 T4: 65~160 |
| 驱逐舰3 | - | T5: 75~190 T6: 85~200 |
| 预警机 | T1: 50~200 | - |
| T2: 60~210 | - | |
| T3: 25~150 | - | |
| T4: 35~160 | - | |
| T5: 45~190 | - | |
| T6: 55~200 | - |
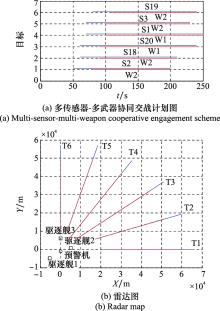
Fig.3
Planning result in scenario 1 (optimized interception opportunities)"
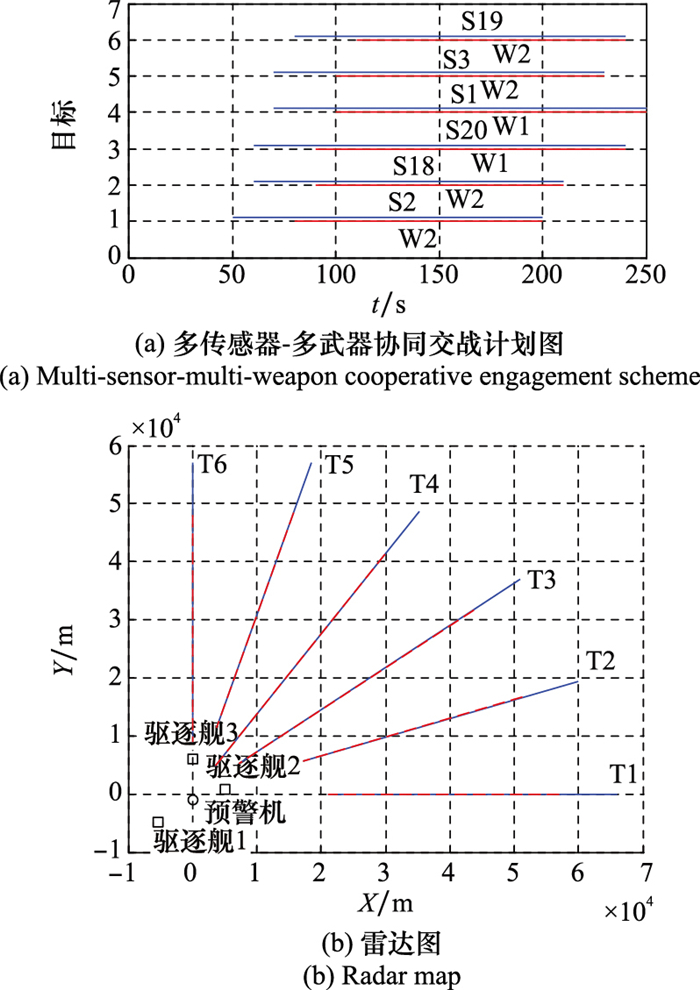
Table 5
Codes of platforms, sensors and weapons in scenario 2"
| 作战平台 | 平台武器 | 平台传感器 |
| 驱逐舰1 | W1 | S1~S10 |
| 驱逐舰2 | W2 | S11~S20 |
| 驱逐舰3 | W3 | S21~S30 |
| 预警机 | - | S31~S50 |
Table 6
Interception time of weapons (scenario 2) s"
| 平台武器 | T1~T8 | T9~T16 | T17~T24 |
| W1 | 50~250 | - | 65~235 |
| W2 | 55~245 | 50~250 | - |
| W3 | 65~235 | 60~240 | 75~220 |
Table 7
Interception opportunities of weapons (scenario 2)"
| 平台武器 | T1~T8 | T9~T16 | T17~T24 |
| W1 | 10 | 0 | 6 |
| W2 | 8 | 9 | 0 |
| W3 | 6 | 7 | 4 |
Table 8
Tracking time of sensors s"
| 平台传感器 | T1~T8 | T9~T16 | T17~T24 |
| S1~S10 | 100~300 | - | 100~300 |
| S11~S20 | 150~300 | 10~300 | 15~300 |
| S21~S30 | 200~300 | 100~300 | 5~300 |
| S31~S50 | 1~200 | 1~200 | 1~200 |
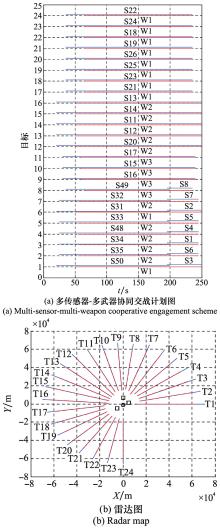
Fig.4
Planning result in scenario 2 (optimized interception opportunities)"
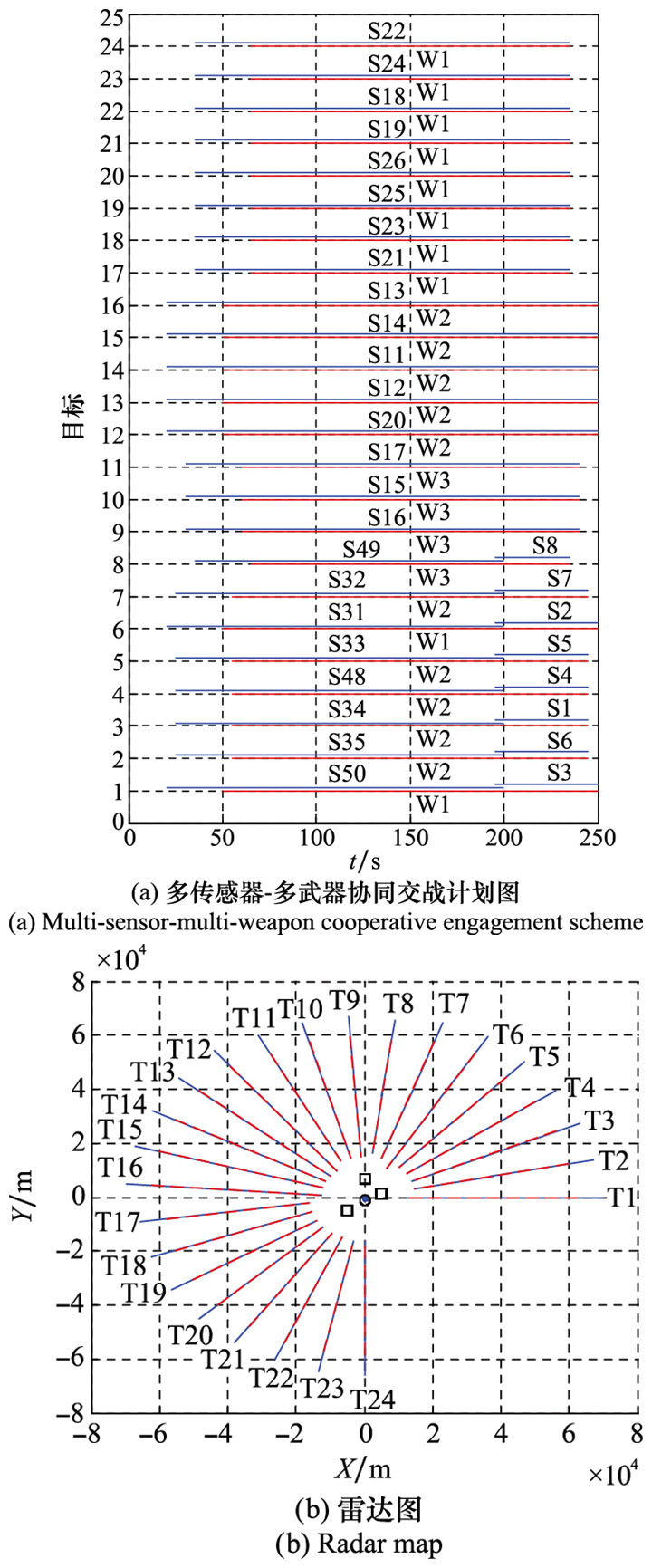
Table 9
Cooperative engagement scheme in scenario 2 s"
| 作战平台 | 跟踪任务 | 拦截任务 |
| 驱逐舰1 | T1: 195~240 T2: 195~240 T3: 195~240 T4: 195~240 T5: 195~240 T6: 195~250 T7: 195~240 T8: 195~250 - - | T1: 50~250 T6: 50~250 T17: 65~235 T18: 65~235 T19: 65~235 T20: 65~235 T21: 65~235 T22: 65~235 T23: 65~235 T24: 65~235 |
| 驱逐舰2 | T9: 30~240 T10: 30~240 T11: 30~240 T12: 20~250 T13: 20~250 T14: 20~250 T15: 20~250 T16: 20~250 T21: 35~235 T22: 35~235 | T2: 55~240 T3: 55~240 T4: 55~240 T5: 55~240 T7: 55~240 T12: 50~250 T13: 50~250 T14: 50~250 T15: 50~250 T16: 50~250 |
| 驱逐舰3 | T17: 35~235 T18: 35~235 T19: 35~235 T20: 35~235 T23: 35~235 T24: 35~235 | T8: 65~235 T9: 60~240 T10: 60~240 T11: 60~240 - - |
| 预警机 | T1: 20~200 T2: 25~200 T3: 25~200 T4: 25~200 T5: 25~200 T6: 20~200 T7: 25~200 T8: 35~200 | - - - - - - - - |
Table 10
Tracking time of sensors in scenario 2 s"
| 传感器 | T1~T8 | T9~T16 | T17~T24 |
| S1~S10 | 100~300 | - | 100~300 |
| S11~S20 | 200~300 | 150~300 | 150~300 |
| S21~S30 | 200~300 | 100~300 | 5~300 |
| S31~S50 | 1~200 | 1~200 | 1~200 |
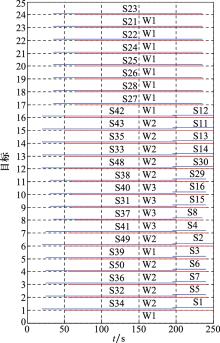
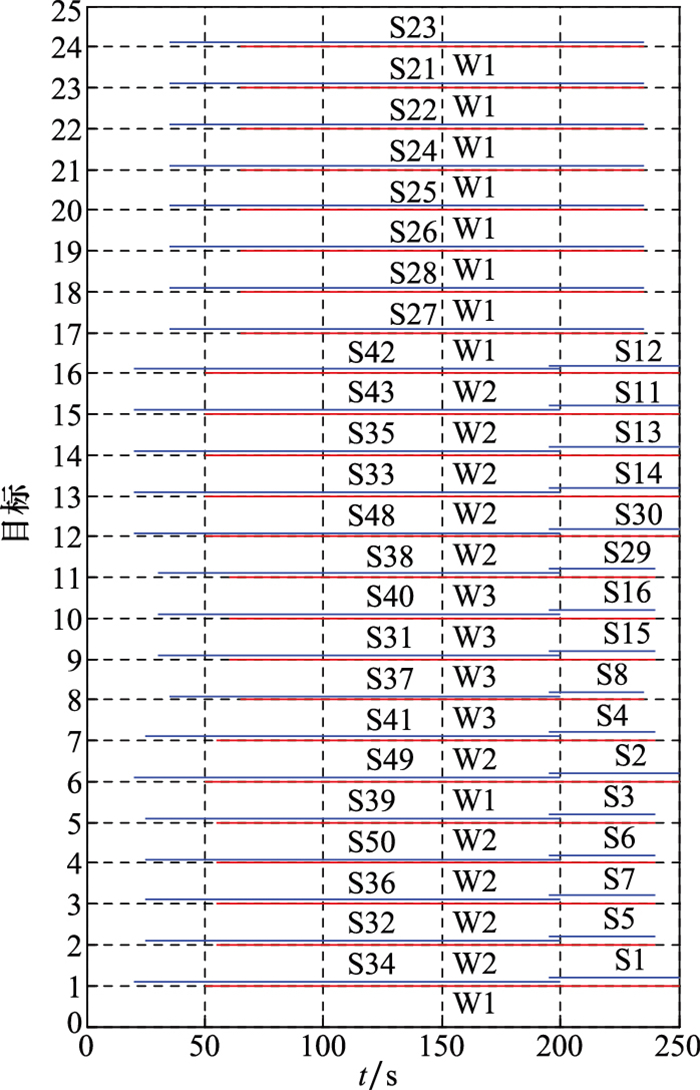
Fig.5
Planning result in scenario 2 (optimized interception opportunities with weakened detection capability of destroyer 2)"
| 1 | KARAKO T , RUMBAUGH W . Distributed defense new operational concepts for integrated air and missile defense[M]. Washington DC: Center for Strategic and International Studies, 2018. |
| 2 | DAVIS L , BEERY P , PAULO E . Investigation of integration and potential conflicts for distributed maritime operations and integrated air and missile defense[J]. Naval Engineers Journal, 2020, 132 (1): 83- 95. |
| 3 | WEISS G. Seeing 2020: America's new vision for integrated air and missile defense[R]. Washington DC: National Defense University, 2015: 104-112. |
| 4 | BRYAN C, DAN P, HASSISON S. Mosaic warfare exploiting artifical intelligence and autonomous systems to implement desion-centric operations[R]. Washington DC: Center for Strategic and Budgetary Assessments, 2020: 1-65. |
| 5 | 向南, 豆亚杰, 姜江, 等. 马赛克战概念下作战模块应急重构自主决策[J]. 指挥与控制学报, 2020, 3 (6): 223- 228. |
| XIANG N , DOU Y J , JIANG J , et al. Autonomous emergency decision-making of combat module under mosaic warfare[J]. Journal of Command and Control, 2020, 3 (6): 223- 228. | |
| 6 | NEWSTADT G, HERO A. Sensor management and provisioning for multiple target radar tracking systems[C]//Proc. of the IEEE International Conference on Acoustics Speech, and Signal Processing, 2012: 5273-5276. |
| 7 | SHARMA R, PARK D. Cooperative sensor resource management for multi target geolocalization using small fixed-wing unmanned aerial vehicles[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013. |
| 8 |
NI P , LIU J M , LIU Y L , et al. Research on mission planning for distributed multi-sensors in anti-TBM combat based on multi-agent system[J]. Sensor Letter, 2014, 12 (2): 325- 331.
doi: 10.1166/sl.2014.3280 |
| 9 |
FU Y F , LING Q , TIAN Z . Distributed sensor allocation for multitarget tracking in wireless sensor networks[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (4): 3538- 3553.
doi: 10.1109/TAES.2012.6324736 |
| 10 | 孙文, 王刚, 王晶晶, 等. 高速隐身目标多传感器协同探测跟踪任务分解策略[J]. 探测与控制学报, 2021, 43 (1): 68- 73. |
| SUN W , WANG G , WANG J J , et al. The mission decomposition strategy of the high-speed stealth target multi-sensor detection and tracking[J]. Journal of Detection & Control, 2021, 43 (1): 68- 73. | |
| 11 | 闫实, 贺静, 王跃东, 等. 基于强化学习的多机协同传感器管理[J]. 系统工程与电子技术, 2020, 42 (8): 1726- 1733. |
| YAN S , HE J , WANG Y D , et al. Multi-airborne cooperative sensor management based on reinforcement learning[J]. Systems Engineering and Electronics, 2020, 42 (8): 1726- 1733. | |
| 12 | NEEMA K, DELAURENTIS D. Consensus based heuristic algorithm for distributed sensor management[C]//Proc. of the AIAA Infotech, 2015. |
| 13 | SEVERSON T A , PALEY D A . Distributed multitarget search and track assignment with consensus-based coordination[J]. IEEE Sensors Journal, 2015, 15 (2): 864- 875. |
| 14 | 罗江锋, 朱承, 崔婧, 等. 舰艇防空火力规划与调度方法研究[J]. 国防科技大学学报, 2013, 35 (2): 40- 45. |
| LUO J F , ZHU C , CUI J , et al. Planning and scheduling for the air defense of warship[J]. Journal of National University of Defense Technology, 2013, 35 (2): 40- 45. | |
| 15 | 罗江锋, 朱承, 刘忠, 等. 连续多目标来袭下的舰艇防空火力在线调度[J]. 系统工程理论与实践, 2014, 34 (11): 2929- 2937. |
| LUO J F , ZHU C , LIU Z , et al. On-line schedule of the warship firepower when suffering from the attack of multiple continuous incoming objects[J]. Systems Engineering-Theory & Practice, 2014, 34 (11): 2929- 2937. | |
| 16 | LLOYD H. Application of a dynamic programming algorithm for weapon target assignment[R]. Edinburgh South Australia: Defence Science and Technology Group, Department of Defence, Australian Government, DST-Group-TR-3221, 2016: 1-22. |
| 17 | WANG Y , LI J , HUANG W L , et al. Dynamic weapon target assignment based on intuitionistic fuzzy entropy of discrete particle swarm[J]. China Communications, 2017, 14 (1): 169- 179. |
| 18 | VOLLE K , ROGERS J , BRINK K . Decentralized cooperative control methods for the modified weapon-target assignment problem[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (9): 1934- 1948. |
| 19 | KALYANAM K , CASBEER D , PACHTER M . Monotone optimal threshold feedback policy for sequential weapon target assignment[J]. Journal of Aerospace Information Systems, 2017, 14 (1): 68- 72. |
| 20 | XU J Z . Weapon-target assignment with fuzzy multi-objective ranking genetic algorithm[J]. Military Operation Research and System Engineering, 2010, 24 (3): 70- 74. |
| 21 | VOLLE K, ROGERS J, BRINK K. Scalable cooperative control algorithms for the weapon target assignment problem[C]//Proc. of the AIAA Guidance, Navigation, and Control Confe-rence, 2016. |
| 22 | 孙海文, 谢晓方, 庞威, 等. 基于改进火力分配模型的综合防空火力智能优化分配[J]. 控制与决策, 2020, 35 (5): 1102- 1112. |
| SUN H W , XIE X F , PANG W , et al. Integrated air defense firepower intelligence optimal assignment based on improved firepower assignment model[J]. Control and Decision, 2020, 35 (5): 1102- 1112. | |
| 23 | 刘振, 徐学文, 李静. 考虑协同制导的编队一体化防空问题分析与求解[J]. 指挥与控制学报, 2018, 4 (3): 213- 219. |
| LIU Z , XU X W , LI J . Analysis and solving for formation integrated air defense considering cooperative guidance[J]. Journal of Command and Control, 2018, 4 (3): 213- 219. | |
| 24 | 潘浩, 孙建军, 李双霖, 等. 基于网络探测数据的编队防空武器通道组织模型研究[C]//第八届中国指挥控制大会论文集, 2020: 741-747. |
| PAN H, SUN J J, LI S L, et al. Research on weapon organizing using network seneor data in coordinated air defense of naval vessel formation[C]//Proc. of the 8th China Conference on Command and Control, 2020: 741-747. | |
| 25 | ORHAN K . Air defense missile-target allocation models for a naval task group[J]. Computer & Operations Research, 2008, 35 (2): 1759- 1770. |
| 26 | MAHESWARARAJAH S, HALGAMUGE S. Sensor scheduling for target tracking using particle swarm optimization[C]//Proc. of the IEEE 63th Vehicular Technology Conference, 2006: 573-577. |
| 27 | GUPTA A, VIRMANI A, MAHAJAN P, et al. A particle swarm optimization-based cooperation method for multiple-target search by swarm UAVs in unknown environments[C]//Proc. of the 7th International Conference on Automation, Robotics and Applications, 2021: 95-100. |
| 28 | ZHU W M , HU X X , XIA W , et al. A two-phase genetic annealing method for intergrated earth observation satellite sche-duling problems[J]. Soft Computing, 2019, 23 (1): 181- 196. |
| 29 | DEB K . A fast elitist multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Trans.on Evolutionary Computation, 2000, 6 (2): 182- 197. |
| 30 | ZHAO Y , CHEN Y F , ZHEN Z Y , et al. Multi-weapon multi-target assignment based on hybrid genetic algorithm in uncertain environment[J]. International Journal of Advanced Robotic Systems, 2020, 17 (2): 1- 16. |
| 31 | ICOLARI V, TARCHI D, GUIDOTTI A, et al. Genetic inspired scheduling algorithm for cognitive satellite systems[C]//Proc. of the IEEE International Conference on Communications, 2016. |
| [1] | Wenhai WU, Xiaofeng GUO, Siyu ZHOU, Li GAO. Improved differential evolution algorithm for solving weapon-targetassignment problem [J]. Systems Engineering and Electronics, 2021, 43(4): 1012-1021. |
| [2] | Jiayi LIU, Gang WANG, Jie ZHANG, Chuang WANG, Xituan SONG. Target optimal assignment model based on improved AGD-distributed multi-Agent system [J]. Systems Engineering and Electronics, 2020, 42(4): 863-870. |
| [3] | WU Yong, LIN Wenxiang, JIAO Jingtao, ZHANG Jiandong. Algorithm of target assignment of isomorphic resources based on induction [J]. Systems Engineering and Electronics, 2019, 41(2): 342-348. |
| [4] | CHU Xiaogeng, MA Zhengwei, CHEN Xingjun. Look-ahead margin-greedy constructive algorithm for the multi-objective optimization of the weapon target assignment problem [J]. Systems Engineering and Electronics, 2019, 41(10): 2252-2259. |
| [5] | LIU Qingguo, LIU Xinxue, XIA Wei, GUO Huijun. Target assignment optimization of multiple on-orbit weapon platforms with multiple warheads [J]. Systems Engineering and Electronics, 2018, 40(5): 1050-1056. |
| [6] | XU Hao, XING Qinghua, WANG Wei. WTA for air and missile defense based on fuzzy multi-objective programming [J]. Systems Engineering and Electronics, 2018, 40(3): 563-570. |
| [7] | OUYANG Zhihong, XUE Lei, DING Feng. Jamming target assignment method of regional electronic air defense against electrooptical precision guided weapon#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2621-2628. |
| [8] | XIE Junjie, LUO Pengcheng, MU Fuling, WANG Jun, DING Shuai. Air combat target assignment in ABMS based on Q-learning algorithm [J]. Systems Engineering and Electronics, 2017, 39(3): 557-561. |
| [9] | WANG Yi, SUN Jin-biao, XIAO Ming-qing, LUO Ji-xun. Research of dynamic weapon-target assignment problem based on type-2 interval fuzzy K-nearest neighbors classifier [J]. Systems Engineering and Electronics, 2016, 38(6): 1314-1319. |
| [10] | CHEN Jun-wei, CHANG Tian-qing, ZHANG Lei, YANG Guo-zhen, MA Dian-zhe. Two-stage model of WTA oriented armored unit combat method [J]. Systems Engineering and Electronics, 2016, 38(6): 1326-1331. |
| [11] | CHANG Tian-qing, CHEN Jun-wei, HAO Na, MA Dian-zhe. Terminating control of ant colony algorithm for armored unit dynamic weapon-target assignment [J]. Systems Engineering and Electronics, 2015, 37(2): 343-347. |
| [12] | PANG Yi1, SUN Qinglin1, JIAO Gangling2, ZHAO Chunlong1, CHEN Zengqiang1. Warship formation anti-sea attack simulation system based on multi-Agent [J]. Systems Engineering and Electronics, 2015, 37(10): 2396-2403. |
| [13] | WAN Lu-jun,YAO Pei-yang, ZHOU Xiang-xiang, SUN Peng. Distributed cooperative target assignment method of manned combat agents and unmanned combat agents [J]. Systems Engineering and Electronics, 2014, 36(2): 278-287. |
| [14] | ZHANG Ying, YANG Rennong, ZUO Jialiang, JING Xiaoning. Weapontarget assignment based on decompositionbased evolutionary#br# multiobjective optimization algorithms [J]. Systems Engineering and Electronics, 2014, 36(12): 2435-2441. |
| [15] | HUANG Feng, CHEN Zhong-qi, FENG Jin-fu, LI Zhan-wu, FAN Wen-zhi. Target assignment algorithm for air-to-ship missile based on semi-restraint stochastic searching [J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1676-1680. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||