Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (5): 1627-1637.doi: 10.12305/j.issn.1001-506X.2025.05.24
• Guidance, Navigation and Control • Previous Articles
Prescribed performance control of hypersonic morphing vehicle based on high-order fixed-time observer
Yiheng LI1, Qunli XIA1,*, Mingkai WANG2
- 1. School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
2. Hangzhou International Innovation Institute, Beihang University, Hangzhou 311115, China
-
Received:2024-06-24Online:2025-06-11Published:2025-06-18 -
Contact:Qunli XIA
CLC Number:
Cite this article
Yiheng LI, Qunli XIA, Mingkai WANG. Prescribed performance control of hypersonic morphing vehicle based on high-order fixed-time observer[J]. Systems Engineering and Electronics, 2025, 47(5): 1627-1637.
share this article
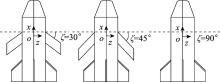
Fig.1
Schematic diagram of HMV configuration"
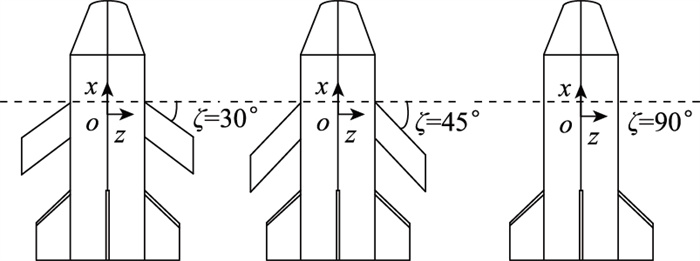

Fig.2
Diagram of controller structure"
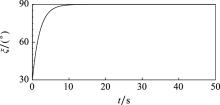
Fig.3
Sweep angle curve"
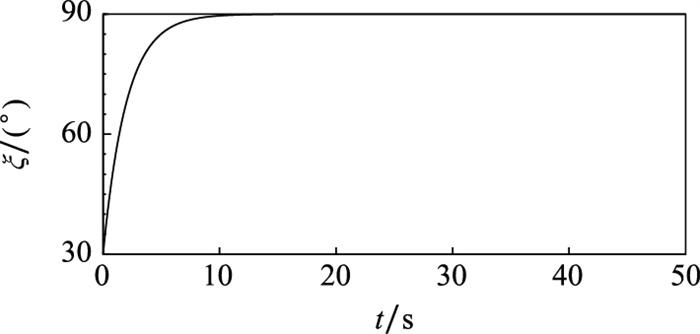
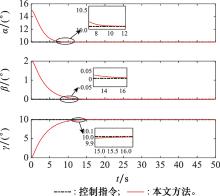
Fig.4
Attitude angle tracking curve (case 1)"
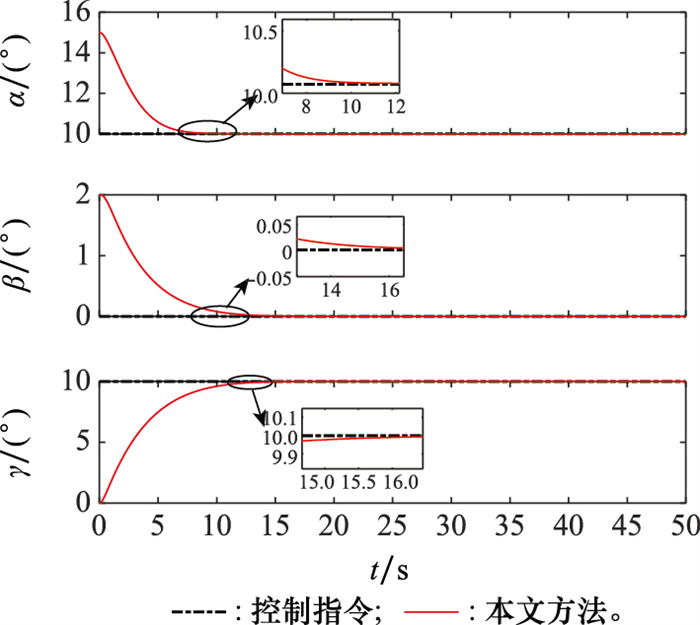
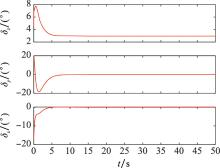
Fig.5
Control quantity"
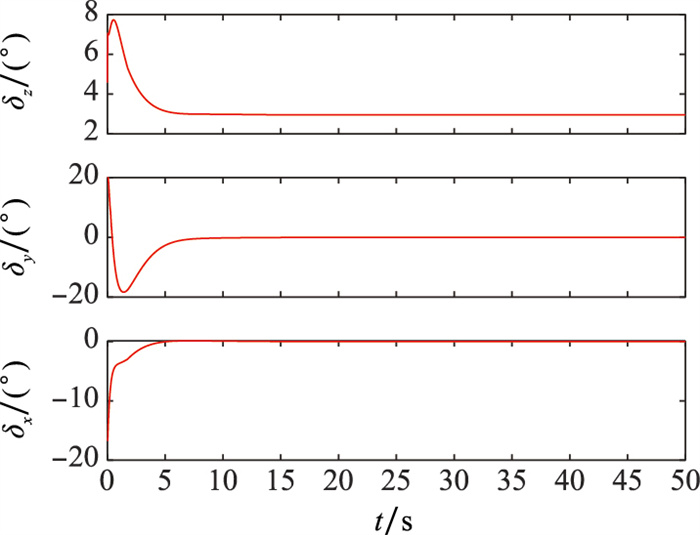
Fig.6
Anti-saturation auxiliary function"
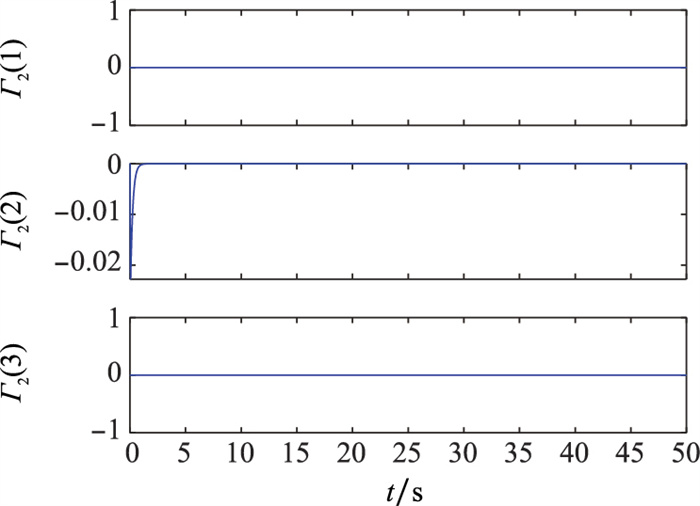
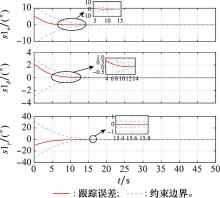
Fig.7
Tracking error s1 and state constraints"
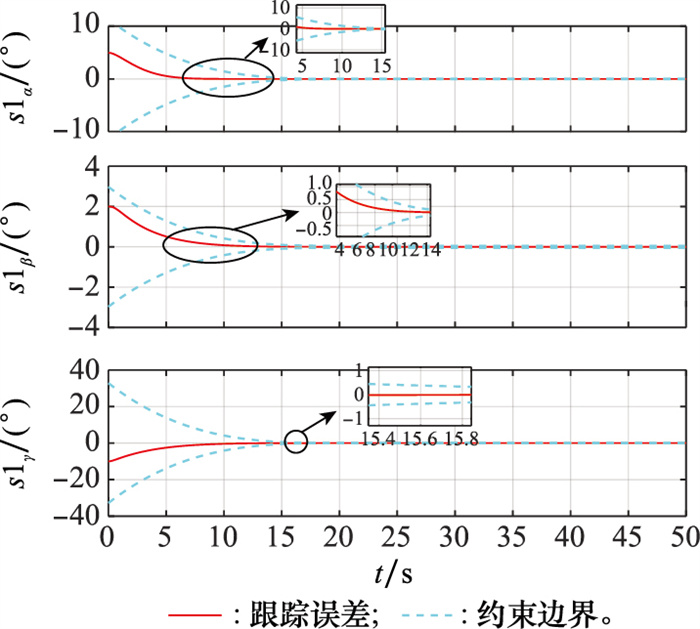
Fig.8
Flight path curve"
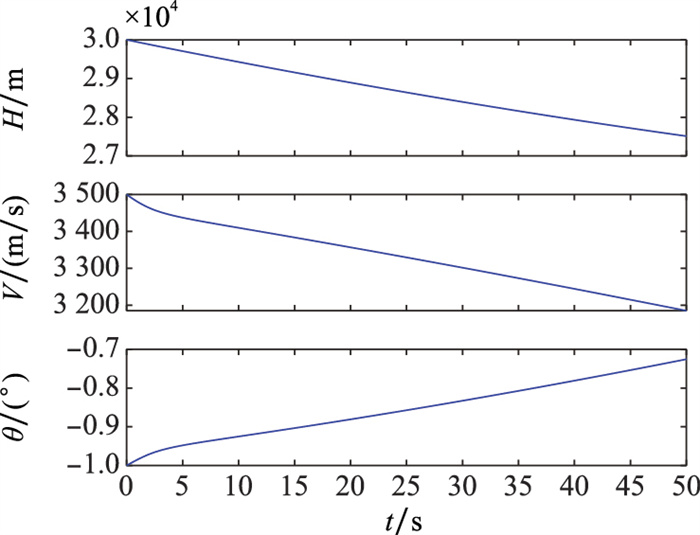

Fig.9
Attitude angle tracking curve(case 2)"
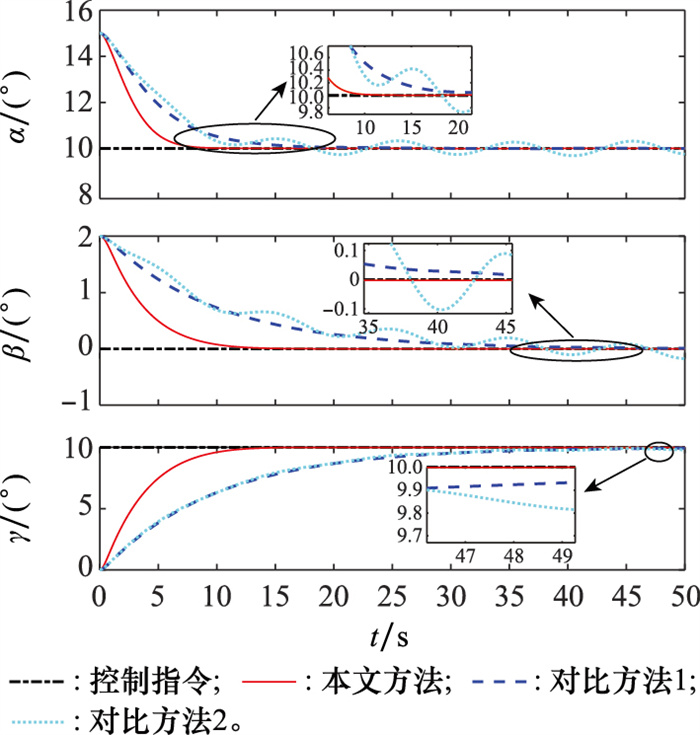
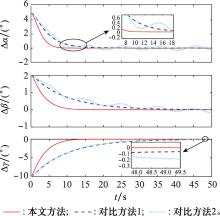
Fig.10
Attitude angle tracking error curve"
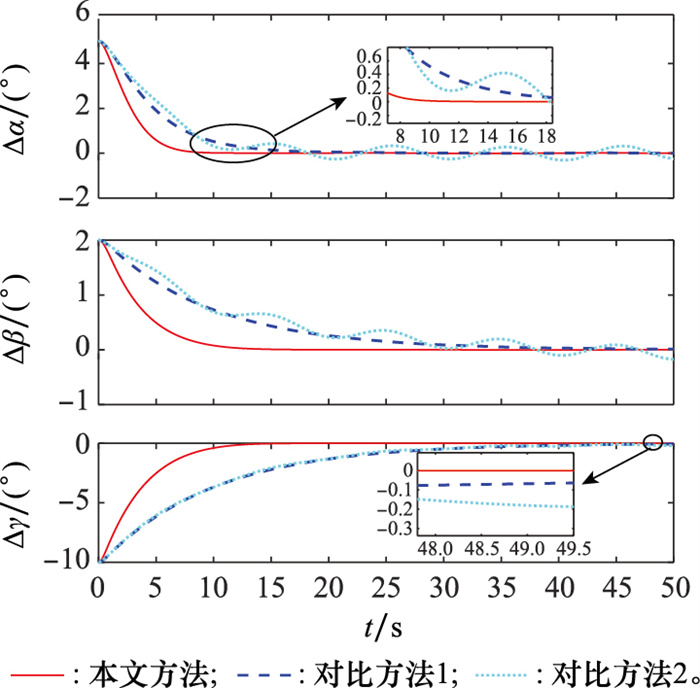
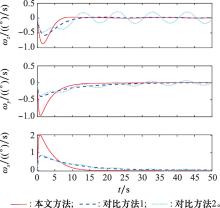
Fig.11
Attitude angular velocity curve"
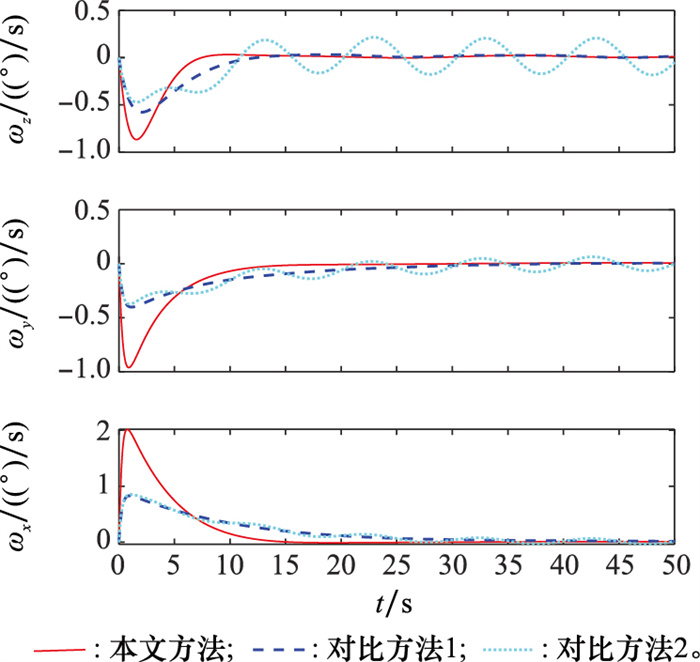
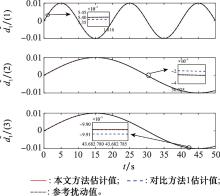
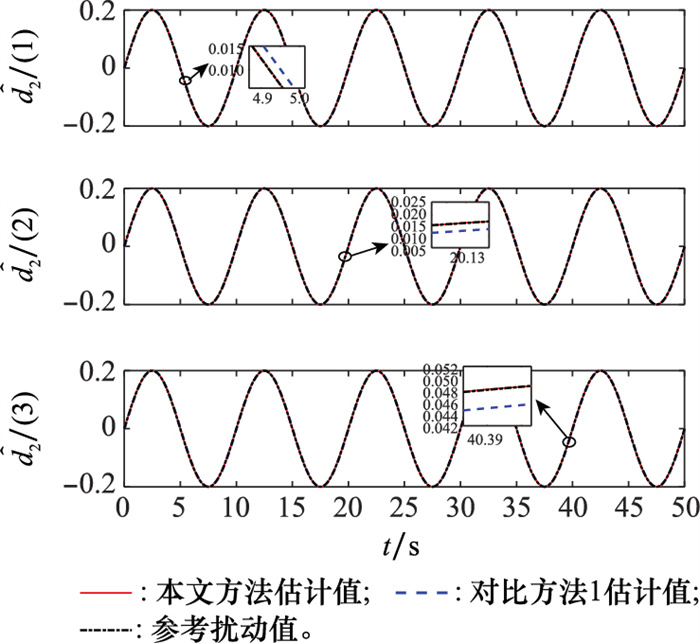
Fig.12
Outer loop disturbance estimation value"
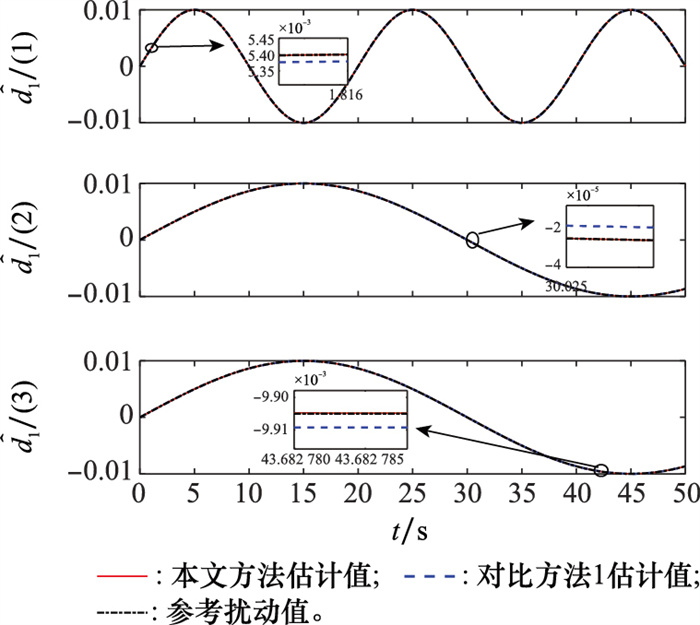
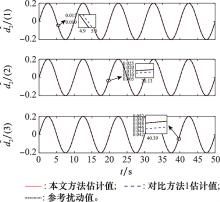
Fig.13
Inner loop disturbance estimation value"
| 1 |
BAO C Y , WANG P , TANG G J . Integrated method of gui-dance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34 (5): 535- 553.
doi: 10.1016/j.cja.2020.11.009 |
| 2 |
XU S H , WEI C Z , ZHANG L T , et al. Neural network based adaptive non-singular practical predefined-time fault-tolerant control for hypersonic morphing aircraft[J]. Chinese Journal of Aeronautics, 2024, 37 (4): 421- 435.
doi: 10.1016/j.cja.2023.12.020 |
| 3 |
WU Z H , LU J C , ZHOU Q , et al. Modified adaptive neural dynamic surface control for morphing aircraft with input and output constraints[J]. Nonlinear Dynamics, 2017, 87 (4): 2367- 2383.
doi: 10.1007/s11071-016-3196-0 |
| 4 |
LIANG X H , WANG Q , XU B , et al. Backstepping fault-toler ant control for morphing aircraft based on fixed-time observer[J]. International Journal of Control, Automation and Systems, 2021, 19 (12): 3924- 3936.
doi: 10.1007/s12555-020-0764-3 |
| 5 |
DONG C Y , LIU C , WANG Q , et al. Switched adaptive active disturbance rejection control of variable structure near space vehicles based on adaptive dynamic programming[J]. Chinese Journal of Aeronautics, 2019, 32 (7): 1684- 1694.
doi: 10.1016/j.cja.2019.03.009 |
| 6 |
DAI P , FENG D Z , ZHAO J Q , et al. Asymmetric integral barrier Lyapunov function based dynamic surface control of a state-constrained morphing waverider with anti-saturation compensator[J]. Aerospace Science and Technology, 2022, 131, 107975.
doi: 10.1016/j.ast.2022.107975 |
| 7 | 陈浩岚, 王鹏, 汤国建. 变形飞行器输出误差受限与输入饱和控制方法[J]. 航空学报, 2023, 44 (15): 408- 419. |
| CHEN H L , WANG P , TANG G J . Attitude control scheme for morphing vehicles with output error constraints and input saturation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (15): 408- 419. | |
| 8 |
蔡光斌, 毛定坤, 杨芊, 等. 基于SDRE的变体飞行器LPV稳定控制[J]. 系统工程与电子技术, 2023, 45 (12): 4013- 4020.
doi: 10.12305/j.issn.1001-506X.2023.12.32 |
|
CAI G B , MAO D K , YANG Q , et al. LPV stability control of morphing aircraft based on SDRE[J]. Systems Engineering and Electronics, 2023, 45 (12): 4013- 4020.
doi: 10.12305/j.issn.1001-506X.2023.12.32 |
|
| 9 |
YAN B B , LI Y , DAI P , et al. Aerodynamic analysis, dynamic modeling, and control of a morphing aircraft[J]. Journal of Aerospace Engineering, 2019, 32 (5): 04019058.
doi: 10.1061/(ASCE)AS.1943-5525.0001047 |
| 10 |
JIANG W L , DONG C Y , WANG Q . A systematic method of smooth switching LPV controllers design for a morphing aircraft[J]. Chinese Journal of Aeronautics, 2015, 28 (6): 1640- 1649.
doi: 10.1016/j.cja.2015.10.005 |
| 11 |
XU W F , LI Y H , PEI B B , et al. Coordinated intelligent control of the flight control system and shape change of variable sweep morphing aircraft based on dueling-DQN[J]. Aerospace Science and Technology, 2022, 130, 107898.
doi: 10.1016/j.ast.2022.107898 |
| 12 |
BABAEI A R , MALEKZADEH M , MADHKHAN D . Adaptive super-twisting sliding mode control of 6-DOF nonlinear and uncertain air vehicle[J]. Aerospace Science and Technology, 2019, 84, 361- 374.
doi: 10.1016/j.ast.2018.09.013 |
| 13 |
CHU L L , LI Q , GU F , et al. Design, modeling, and control of morphing aircraft: a review[J]. Chinese Journal of Aeronautics, 2022, 35 (5): 220- 246.
doi: 10.1016/j.cja.2021.09.013 |
| 14 |
韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44 (4): 1310- 1317.
doi: 10.12305/j.issn.1001-506X.2022.04.29 |
|
WEI J B , LI H Y , LI J . Novel back-stepping control for hypersonic vehicle with angle of attack constraint[J]. Systems Engineering and Electronics, 2022, 44 (4): 1310- 1317.
doi: 10.12305/j.issn.1001-506X.2022.04.29 |
|
| 15 |
GONG L G , WANG Q , DONG C Y . Disturbance rejection control of morphing aircraft based on switched nonlinear systems[J]. Nonlinear Dynamics, 2019, 96 (2): 975- 995.
doi: 10.1007/s11071-019-04834-9 |
| 16 |
WANG Q , GONG L G , DONG C Y , et al. Morphing aircraft control based on switched nonlinear systems and adaptive dynamic programming[J]. Aerospace Science and Technology, 2019, 93, 105325.
doi: 10.1016/j.ast.2019.105325 |
| 17 |
AN H , WANG C H , FIDAN B . Sliding mode disturbance observer-enhanced adaptive control for the air-breathing hypersonic flight vehicle[J]. Acta Astronautica, 2017, 139, 111- 121.
doi: 10.1016/j.actaastro.2017.06.026 |
| 18 |
SUN J G , SONG S M , CHEN H. , et al. Fast terminal sliding mode tracking control of hypersonic vehicles based on non-ho-mogeneous disturbance observer[J]. International Journal of Control, Automation and Systems, 2017, 15 (6): 2646- 2659.
doi: 10.1007/s12555-016-0785-0 |
| 19 |
SUN J L , YI J Q , PU Z Q , et al. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2020, 50 (11): 4377- 86.
doi: 10.1109/TSMC.2018.2847706 |
| 20 | 李亚苹, 王芳, 周超. 全状态受限的高超声速飞行器的预定性能滤波反步控制[J]. 航空学报, 2020, 41 (11): 109- 120. |
| LI Y P , WANG F , ZHOU C . Prescribed performance filter back-stepping control of hypersonic vehicle with full state constraints[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (11): 109- 120. | |
| 21 | 曹承钰, 李繁飙, 廖宇新, 等. 高超声速变外形飞行器建模与固定时间预设性能控制[J]. 自动化学报, 2024, 50 (3): 486- 504. |
| CAO C Y , LI F B , LIAO X Y , et al. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle[J]. Acta Automatica Sinica, 2024, 50 (3): 486- 504. | |
| 22 |
WU Y Y , ZHANG Y , WU A G . Preassigned finite-time attitude control for spacecraft based on time-varying barrier Lyapunov functions[J]. Aerospace Science and Technology, 2021, 108, 106331.
doi: 10.1016/j.ast.2020.106331 |
| 23 |
ZHANG F , SONG M S , HUANG B X , et al. Adaptive tracking control for tethered aircraft systems with actuator nonli-nearities and output constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2024, 60 (3): 3582- 3597.
doi: 10.1109/TAES.2024.3367283 |
| 24 | 陈峣, 谭立国, 魏毅寅, 等. 考虑状态约束的弹性高超声速飞行器自适应饱和容错控制[J]. 宇航学报, 2021, 42 (7): 850- 861. |
| CHEN X , TAN L G , WEI Y Y , et al. Adaptive saturated fault-tolerant tracking control of flexible hypersonic vehicle considering state constraints[J]. Journal of Astronautics, 2021, 42 (7): 850- 861. | |
| 25 | GALEANI S , TARBOURIECH S , TURNER M , et al. A tutorial on modern anti-windup design[J]. European Journal of Control, 2009, 15 (3): 418- 440. |
| 26 |
DING Y B , WANG X G , BAI Y L , et al. Novel anti-saturation robust controller for flexible air-breathing hypersonic vehicle with actuator constraints[J]. ISA Transactions, 2020, 99, 95- 109.
doi: 10.1016/j.isatra.2019.09.010 |
| 27 |
QIN W W , HE B , LIU G , et al. Robust model predictive tracking control of hypersonic vehicles in the presence of actuator constraints and input delays[J]. Journal of the Franklin Institute, 2016, 353 (17): 4351- 67.
doi: 10.1016/j.jfranklin.2016.08.007 |
| 28 | HU X X , KARIMI H R , WU L G , et al. Model predictive control-based non-linear fault tolerant control for air-breathing hypersonic vehicles[J]. IET Control Theory & Applications, 2014, 8 (13): 1147- 53. |
| 29 | WANG L , QI R Y , PENG Z Y . Integrated design of adaptive fault-tolerant control for non- minimum phase hypersonic flight vehicle system with input saturation and state constraints[J]. Journal of Aerospace Engineering, 2022, 236 (11): 2281- 301. |
| 30 |
DAI P , YAN B B , HAN T , et al. Barrier Lyapunov function based model predictive control of a morphing waverider with input saturation and full-state constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59 (3): 3071- 3081.
doi: 10.1109/TAES.2022.3222294 |
| 31 |
DAI P , YAN B B , LIU R F , et al. Modeling and nonlinear model predictive control of a variable-sweep-wing morphing waverider[J]. IEEE Access, 2021, 9, 63510- 63520.
doi: 10.1109/ACCESS.2021.3074912 |
| 32 | 张远, 黄万伟, 路坤锋, 等. 高超声速变外形飞行器建模与有限时间控制[J]. 北京航空航天大学学报, 2022, 48 (10): 1979- 1993. |
| ZHANG Y , HUANG W W , LU K F , et al. Modeling and finite-time control for the hypersonic morphing flight vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48 (10): 1979- 1993. | |
| 33 |
ZHANG Y C , MA M C , YANG X Y , et al. Disturbance-observer-based fixed-time control for 6-DOF spacecraft rendezvous and docking operations under full-state constraints[J]. Acta Astronautica, 2023, 205, 225- 238.
doi: 10.1016/j.actaastro.2023.02.005 |
| 34 |
LU Y B , HUANG P F , MENG Z J . Adaptive neural network dynamic surface control of the post-capture tethered spacecraft[J]. IEEE Trans.on Aerospace and Electronic Systems, 2020, 56 (2): 1406- 1419.
doi: 10.1109/TAES.2019.2930015 |
| 35 | BASIN M , YU P , SHTESSEL Y . Finite- and fixed-time diffe-rentiators utilising HOSM techniques[J]. IET Control Theory & Applications, 2017, 11 (8): 1144- 1152. |
| 36 |
CHEN H L , WANG P , TANG G J . Prescribed-time control for hypersonic morphing vehicles with state error constraints and uncertainties[J]. Aerospace Science and Technology, 2023, 142, 108671.
doi: 10.1016/j.ast.2023.108671 |
| 37 | SáNCHEZTORRES J D, SANCHEZ E N, LOUKIANOV A G. Predefined-time stability of dynamical systems with sliding modes[C]//Proc. of the American Control Conference, 2015. |
| 38 |
LIU Y , LIU X P , JING Y W , et al. Direct adaptive preassigned finite-time control with time-delay and quantized input using neural network[J]. IEEE Trans.on Neural Networks and Learning Systems, 2020, 31 (4): 1222- 1231.
doi: 10.1109/TNNLS.2019.2919577 |
| 39 |
ZHAO J Q , FENG D Z , CUI J S , et al. Finite-time extended state observer-based fixed-time attitude control for hypersonic vehicles[J]. Mathematics, 2022, 10 (17): 3162.
doi: 10.3390/math10173162 |
| [1] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [2] | Xiao TANG, Jikun YE, Xu LI. Design of 3D nonlinear prescribed performance guidance law [J]. Systems Engineering and Electronics, 2022, 44(2): 619-627. |
| [3] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking control of multi-UAV formation with prescribed performance guarantees [J]. Systems Engineering and Electronics, 2021, 43(4): 1069-1079. |
| [4] | Yiyi YIN, Xiaofang WANG, Zhen TIAN, Zhuping WANG. Multi-missile formation method based on prescribed performance control [J]. Systems Engineering and Electronics, 2020, 42(12): 2847-2858. |
| [5] | TAO Jiawei, ZHANG Tao. Coupled control of relative position and attitude for spacecraft proximity operations with prescribed performance [J]. Systems Engineering and Electronics, 2019, 41(5): 1103-1109. |
| [6] | ZHANG Yang, WU Wenhai, HU Yunan, GAO Li. Designer of non-affine model controller for carrier-based longitudinal landing [J]. Systems Engineering and Electronics, 2018, 40(3): 635-642. |
| [7] | ZHANG Lei, CHEN Yong, GENG Baoliang. Prescribed performance control of extremum seeking system with unknown parameters [J]. Systems Engineering and Electronics, 2017, 39(10): 2291-2297. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||