Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (10): 3174-3181.doi: 10.12305/j.issn.1001-506X.2022.10.21
• Systems Engineering • Previous Articles Next Articles
Research on anti-submarine strategy for unmanned undersea vehicles
Bin ZENG1,*, Hongqiang ZHANG1, Houpu LI2
- 1. Department of Management and Economics, Naval University of Engineering, Wuhan 430033, China
2. Department of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China
-
Received:2021-12-22Online:2022-09-20Published:2022-10-24 -
Contact:Bin ZENG
CLC Number:
Cite this article
Bin ZENG, Hongqiang ZHANG, Houpu LI. Research on anti-submarine strategy for unmanned undersea vehicles[J]. Systems Engineering and Electronics, 2022, 44(10): 3174-3181.
share this article
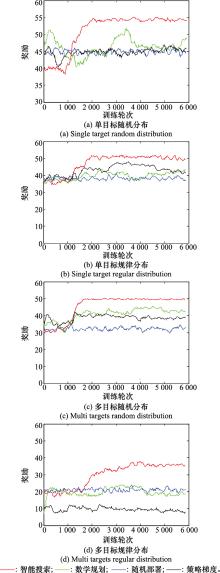
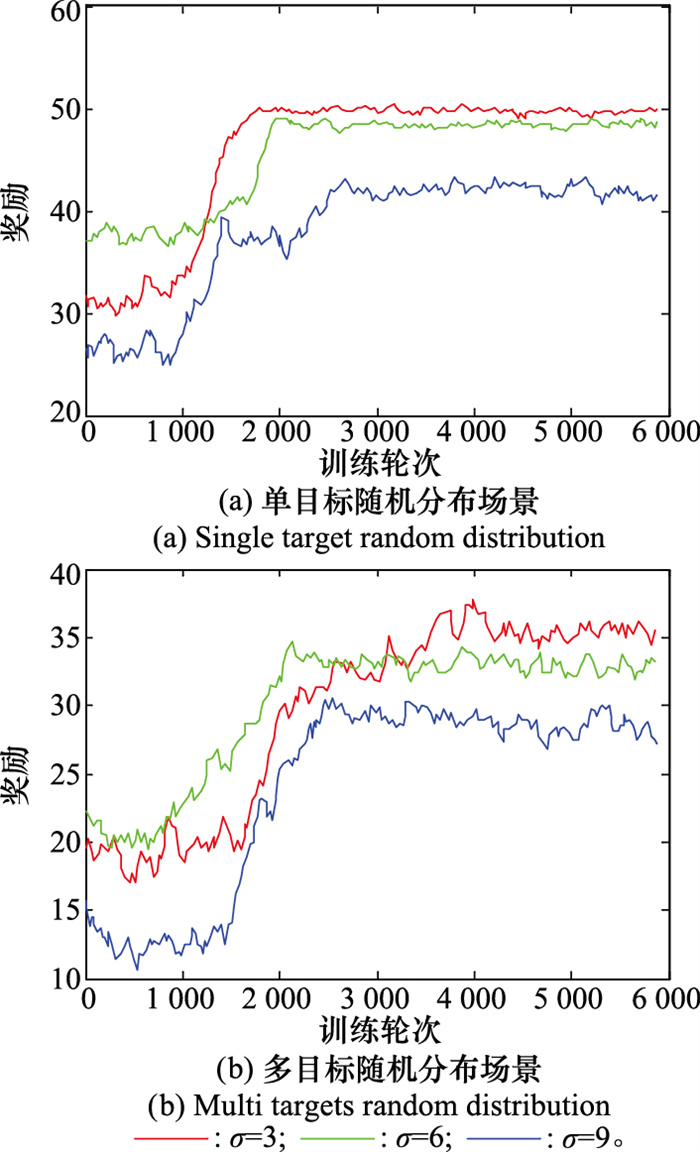
Fig.1
Training curves of different scenarios"
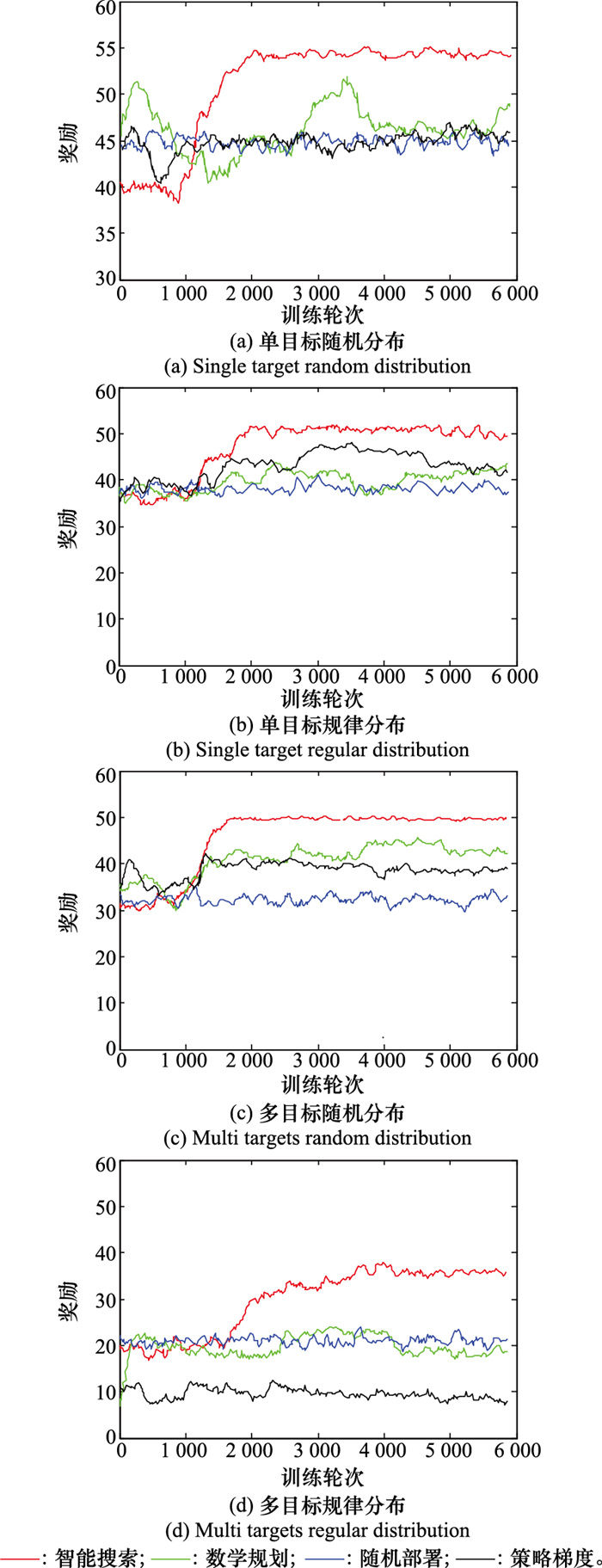
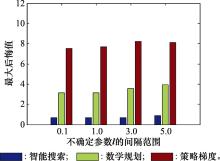
Fig.2
Performance of uncertain enemy distribution"
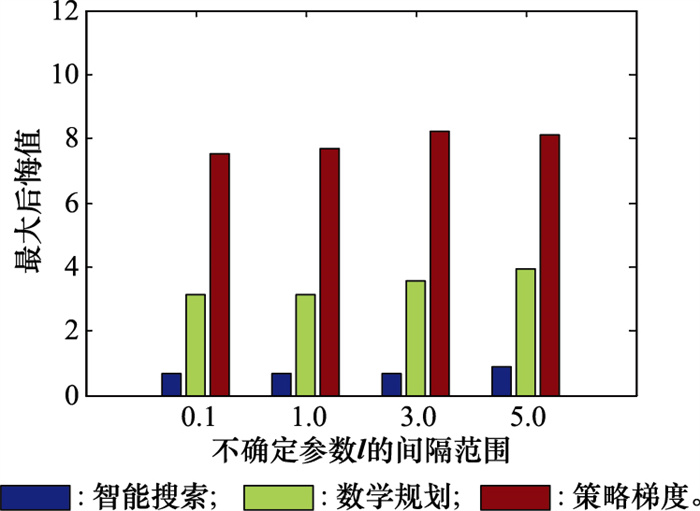
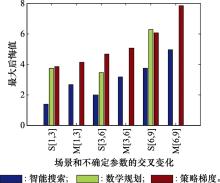
Fig.3
Performance comparison of cross changing of scenarios and uncertain parameters"
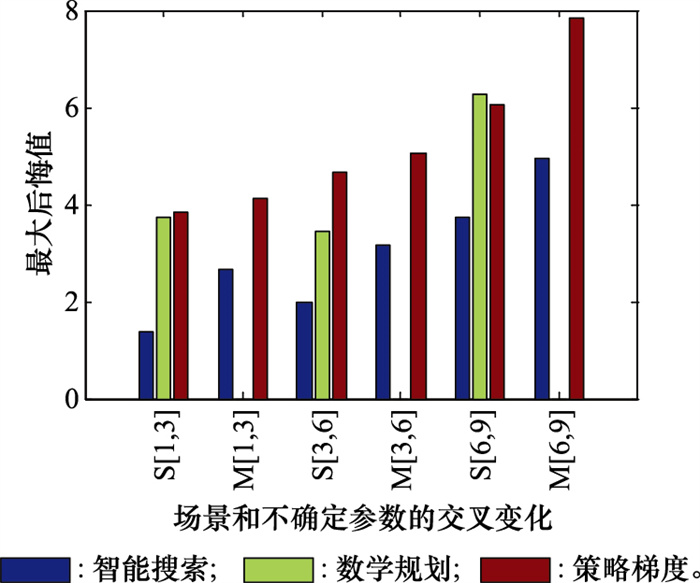
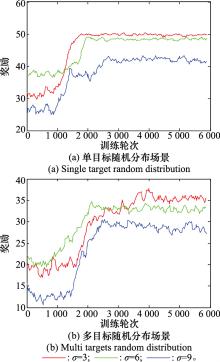
Fig.4
Training curves with different detection probabilities σ"
| 1 |
SANDS T . Development of deterministic artificial intelligence for unmanned underwater vehicles (UUV)[J]. Journal of Marine Science and Engineering, 2020, 8 (8): 578.
doi: 10.3390/jmse8080578 |
| 2 |
SMOLYANINOV I , BALZANO Q , YOUNG D . Development of broadband underwater radio communication for application in unmanned underwater vehicles[J]. Journal of Marine Science and Engineering, 2020, 8 (5): 370.
doi: 10.3390/jmse8050370 |
| 3 |
王淑敏, 唐晓聪. 无人潜航器的国际法法律地位研究-"中美无人潜航器事件"引发的思考[J]. 时代法学, 2017, 15 (4): 3- 8.
doi: 10.3969/j.issn.1672-769X.2017.04.001 |
|
WANG S M , TANG X C . Research on legal status of unmanned undersea vehicles in international law: reflections on the"unmanned undersea vehicles event between China and America"[J]. Presentday Law Science, 2017, 15 (4): 3- 8.
doi: 10.3969/j.issn.1672-769X.2017.04.001 |
|
| 4 | 刘丹. 无人潜航器的国际法规制-法律地位、现实挑战与我国的应对[J]. 中国海洋大学学报(社会科学版), 2021, 28 (3): 13- 27. |
| LIU D . The rule of international law regulating underwater unmanned vehicles: legal status, current challenges and solutions[J]. Journal of Ocean University of China (Social Sciences), 2021, 28 (3): 13- 27. | |
| 5 |
周华任, 王俐莉. 直升机反潜搜索博弈模型研究[J]. 军事运筹与系统工程, 2018, 32 (1): 27- 30.
doi: 10.3969/j.issn.1672-8211.2018.01.005 |
|
ZHOU H R , WANG L L . Game model of helicopter anti-submarine search[J]. Military Operations Research and Systems Engineering, 2018, 32 (1): 27- 30.
doi: 10.3969/j.issn.1672-8211.2018.01.005 |
|
| 6 |
潘磊, 潘宣宏. 反潜巡逻机与无人艇应召反潜中协同声纳搜潜研究[J]. 火力与指挥控制, 2021, 46 (8): 83- 88.
doi: 10.3969/j.issn.1002-0640.2021.08.014 |
|
PAN L , PAN X H . Research on cooperative use of sonar to search for the submarine with anti-submarine patrol aircraft and USV muster[J]. Fire Control & Command Control, 2021, 46 (8): 83- 88.
doi: 10.3969/j.issn.1002-0640.2021.08.014 |
|
| 7 | MISHRA M , AN W , SIDOTI D , et al. Context-aware decision support for anti-submarine warfare mission planning within a dynamic environment[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2017, 50 (1): 318- 335. |
| 8 | HEW P , YIAP N . Optimally randomized patrolling of chokepoints for theatre antisubmarine warfare[J]. Military Operations Research, 2018, 23 (1): 49- 56. |
| 9 |
LAAN C M , BARROS A I , BOUCHERIE R J , et al. Optimal deployment for anti-submarine operations with time-dependent strategies[J]. The Journal of Defense Modeling and Simulation, 2020, 17 (4): 419- 434.
doi: 10.1177/1548512919855435 |
| 10 | KIM R G. Operational planning for theater anti-submarine warfare[D]. Monterey: Naval Postgraduate School, 2017. |
| 11 | BALDESSARI A M. Navy operational planner: anti-submarine warfare with time-dependent performance[D]. Monterey: Naval Postgraduate School, 2017. |
| 12 |
AZIZ R A , HE M L , ZHUANG J . An attacker-defender resource allocation game with substitution and complementary effects[J]. Risk Analysis, 2020, 40 (7): 1481- 1506.
doi: 10.1111/risa.13483 |
| 13 |
AN B , ORDONEZ F , TAMBE M , et al. A deployed quantal response-based patrol planning system for the US Coast Guard[J]. Interfaces, 2013, 43 (5): 400- 420.
doi: 10.1287/inte.2013.0700 |
| 14 | CELLI A, CICCONE M, BONGO R, et al. Coordination in adversarial sequential team games via multi-agent deep reinforcement learning[EB/OL]. [2021-11-22]. https://arXiv.org/abs/1912.07712. |
| 15 | KAMRA N, GUPTA U, WANG K, et al. Deepfp for finding Nash equilibrium in continuous action spaces[C]//Proc. of the International Conference on Decision and Game Theory for Security, 2019: 238-258. |
| 16 | KAMRA N, GUPTA U, FANG F, et al. Policy learning for continuous space security games using neural networks[C]//Proc. of the 32nd AAAI Conference on Artificial Intelligence, 2018: 312-325. |
| 17 | ASHRAF S , SALEEM S , AHMED T . Sagacious communication link selection mechanism for underwater wireless sensors network[J]. Int. J. Wirel. Microw. Technol, 2020, 10 (4): 22- 33. |
| 18 |
MUKAIDANI H , SARAVANAKUMAR R , XU H , et al. Stackelberg strategy for uncertain Markov jump delay stochastic systems[J]. IEEE Control Systems Letters, 2020, 4 (4): 1006- 1011.
doi: 10.1109/LCSYS.2020.2998430 |
| 19 |
CAÇADOR S , DIAS J M , GODINHO P . Global minimum variance portfolios under uncertainty: a robust optimization approach[J]. Journal of Global Optimization, 2020, 76 (2): 267- 293.
doi: 10.1007/s10898-019-00859-x |
| 20 |
KNIGHT V , CAMPBELL J . Nashpy: a python library for the computation of Nash equilibria[J]. Journal of Open Source Software, 2018, 3 (30): 904.
doi: 10.21105/joss.00904 |
| 21 | LI S H, WU Y, CUI X Y, et al. Robust multi-agent reinforcement learning via minimax deep deterministic policy gradient[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2019, 33(1): 4213-4220. |
| 22 |
ZHONG C , LU Z Y , GURSOY M C , et al. A deep actor-critic reinforcement learning framework for dynamic multichannel access[J]. IEEE Trans.on Cognitive Communications and Networking, 2019, 5 (4): 1125- 1139.
doi: 10.1109/TCCN.2019.2952909 |
| 23 |
YANG Y , LI J T , PENG L L . Multi-robot path planning based on a deep reinforcement learning DQN algorithm[J]. CAAI Transactions on Intelligence Technology, 2020, 5 (3): 177- 183.
doi: 10.1049/trit.2020.0024 |
| 24 | COMPARE M , BARALDI P , MARELLI P , et al. Partially observable Markov decision processes for optimal operations of gas transmission networks[J]. Reliability Engineering & System Safety, 2020, 199 (6): 106- 120. |
| 25 | JIAO Z L, JAE O. End-to-end reinforcement learning for multi-agent continuous control[C]//Proc. of the 18th IEEE International Conference on Machine Learning and Applications, 2019: 535-540. |
| 26 | MAJUMDAR S, KHADKA S, MIRET S, et al. Evolutionary reinforcement learning for sample-efficient multiagent coordination[C]//Proc. of the International Conference on Machine Learning, 2020: 6651-6660. |
| 27 |
PANG B , NIJKAMP E , WU Y N . Deep learning with tensorflow: a review[J]. Journal of Educational and Behavioral Statistics, 2020, 45 (2): 227- 248.
doi: 10.3102/1076998619872761 |
| 28 | QIU S, WEI X H, YE J P, et al. Provably efficient fictitious play policy optimization for zero-sum markov games with structured transitions[C]//Proc. of the International Conference on Machine Learning, 2021: 8715-8725. |
| 29 | LIU S Q , CAO J J , WANG Y J , et al. Self-play reinforcement learning with comprehensive critic in computer games[J]. Neurocomputing, 2021, 449 (8): 207- 213. |
| [1] | Bin ZENG, Rui WANG, Houpu LI, Hongqiang ZHANG. Nash equilibrium strategy and attack-defense game model for naval support base [J]. Systems Engineering and Electronics, 2022, 44(8): 2570-2580. |
| [2] | Haixiang XU, Cong HU, Wenzhao YU, Guoquan YAO. Variable depth control of buoyancy regulated UUV with input constraints [J]. Systems Engineering and Electronics, 2022, 44(11): 3496-3504. |
| [3] | Jinming DU, Yunhua WU, Zhiming CHEN, bing HUA, Xinyi XU, yi ZHU, Chengfei YUE. Latent area prediction and search method for marine moving targets using game theory [J]. Systems Engineering and Electronics, 2021, 43(9): 2508-2515. |
| [4] | Xiaoming CAO, Yong WEI, Hui HENG, Zhipeng SHEN. Dynamic surface backstepping trajectory tracking control of unmanned underwater vehicles with ocean current disturbances [J]. Systems Engineering and Electronics, 2021, 43(6): 1664-1672. |
| [5] | Chen LI, Yanyan HUANG, Yongliang ZHANG, Tiande CHEN. Multi-agent decision-making method based on Actor-Critic framework and its application in wargame [J]. Systems Engineering and Electronics, 2021, 43(3): 755-762. |
| [6] | Wen MA, Hui LI, Zhuang WANG, Zhiyong HUANG, Zhaoxin WU, Xiliang CHEN. Close air combat maneuver decision based on deep stochastic game [J]. Systems Engineering and Electronics, 2021, 43(2): 443-451. |
| [7] | Bo SONG, Wei YE, Xianghui MENG. Review of multi-agent reinforcement learning based dynamic spectrum allocation method [J]. Systems Engineering and Electronics, 2021, 43(11): 3338-3351. |
| [8] | Chunshan DING. Survey on progress and prospect of sensor management [J]. Systems Engineering and Electronics, 2020, 42(12): 2761-2770. |
| [9] | QIN Maosen, ZHAO Danling, YANG Kewei. Effectiveness evaluation of anti-submarine activities based on combat network [J]. Systems Engineering and Electronics, 2018, 40(7): 1513-1520. |
| [10] | ZHANG Xiang, LI Ge, WANG Peng. Research on target detection in anti-submarine warfare simulation system based on DDDAS [J]. Systems Engineering and Electronics, 2018, 40(11): 2591-. |
| [11] | PANG Ce, HUANG Shucai, LIU Jinchang, ZHAO Wei. Multi-sensor cross cueing algorithm basing on the game theory [J]. Systems Engineering and Electronics, 2017, 39(8): 1684-1690. |
| [12] | ZHANG Chuang, ZHANG Jia-yan, ZHAO Hong-lin. Cooperation algorithm based on game theory and particle swarm optimization for Ad-hoc networks [J]. Systems Engineering and Electronics, 2015, 37(3): 664-670. |
| [13] | XIE Yupeng1,2, TAN Xuezhi2, MA Lin1, LI Tao2, WU Haiyan3. Spectrum allocation algorithm base on distributed game theory [J]. Systems Engineering and Electronics, 2015, 37(10): 2391-2395. |
| [14] | CHEN Pan, WU Xiao-feng. Optimal extended position call-search method for UUVs’ formation [J]. Journal of Systems Engineering and Electronics, 2013, 35(5): 987-992. |
| [15] | ZHANG Bei-wei, HU Kun-yuan, ZHU Yun-long. Power control algorithm in cognitive radio based on game theory and efficiency theory [J]. Journal of Systems Engineering and Electronics, 2013, 35(3): 629-633. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||