
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (4): 1412-1421.doi: 10.12305/j.issn.1001-506X.2024.04.30
郑秋实1,*, 许伟春2, 赵明翰1, 李乃星1, 包旭馨1
收稿日期:2023-05-11
出版日期:2024-03-25
发布日期:2024-03-25
通讯作者:
郑秋实
作者简介:郑秋实(1993—), 男, 工程师, 博士, 主要研究方向为飞行器制导与控制基金资助:Qiushi ZHENG1,*, Weichun XU2, Minghan ZHAO1, Naixing LI1, Xuxin BAO1
Received:2023-05-11
Online:2024-03-25
Published:2024-03-25
Contact:
Qiushi ZHENG
摘要:
针对可旋转翼式弹道修正组件滚转通道控制中存在的未建模摩擦干扰、参数不确定性和外部随机干扰造成的复合扰动问题, 提出一种基于扩张状态观测器(extended state observer, ESO)的滑模控制方法。首先建立弹道修正组件滚转通道模型, 将动力学模型中存在的外部干扰、未建模摩擦干扰和参数摄动整合为复合干扰, 然后设计ESO对修正组件滚转通道模型中难以直接测定的状态变量以及复合干扰进行估计, 并基于估计值结合滑模控制理论设计滚转通道控制器, 实现对滚转角指令的精确跟踪。综合考虑ESO和滑模控制器构成的闭环控制系统, 利用Lyaponov稳定性理论证明了所设计的闭环控制系统的稳定性。最后, 通过仿真实验分析, 证明所设计的修正组件滚转通道控制器, 对滚转角指令的瞬态响应和稳态性能优异, 同时可以有效抑制系统复合扰动, 具备较强的鲁棒性。
中图分类号:
郑秋实, 许伟春, 赵明翰, 李乃星, 包旭馨. 可旋转翼式弹道修正组件滚转控制技术研究[J]. 系统工程与电子技术, 2024, 46(4): 1412-1421.
Qiushi ZHENG, Weichun XU, Minghan ZHAO, Naixing LI, Xuxin BAO. Research on roll control technology of trajectory correction fuse with active-canards[J]. Systems Engineering and Electronics, 2024, 46(4): 1412-1421.

图1
可旋转翼式弹道修正组件示意图"


图2
修正组件所受力矩分析"
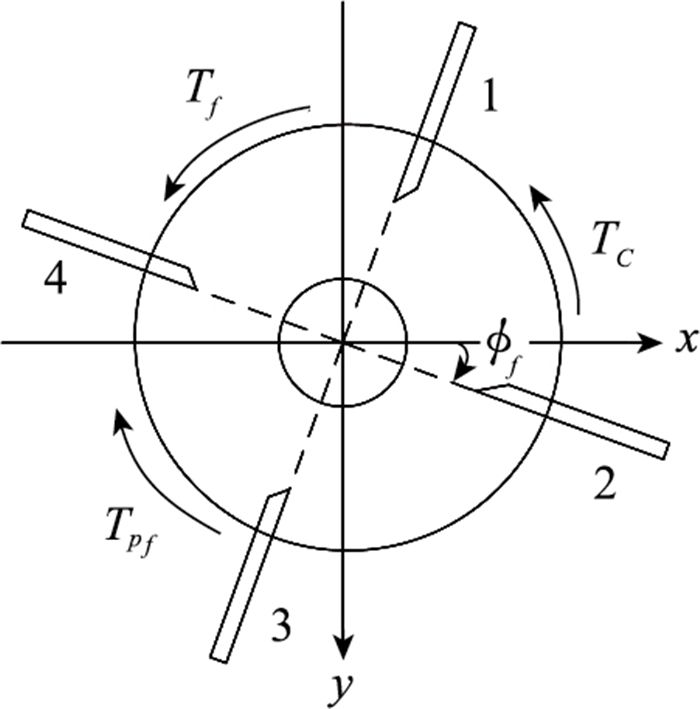

图3
滚转通道模型框图"

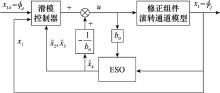
图4
修正组件滚转通道控制系统框图"


图5
飞行速度曲线"


图6
修正组件转速曲线"

表1
物理参数"
| 参数 | 取值 |
| 参考面积S/m2 | 0.018 87 |
| 参考长度L/m | 0.155 |
| 组件滚转惯量Ixf/(kg·m2) | 0.012 |
| 舵机时间常数TS | 0.008 3 |
表2
气动参数"
| 参数 | 飞行马赫数 | ||||
| 0.6 | 0.9 | 1.1 | 1.5 | 2.0 | |
| Clpf | -0.605 0 | -1.409 0 | -1.421 0 | -0.558 0 | 0.373 0 |
| CMδx | -0.001 6 | -0.003 8 | -0.004 2 | -0.001 5 | -0.001 0 |

图7
气动参数曲线"
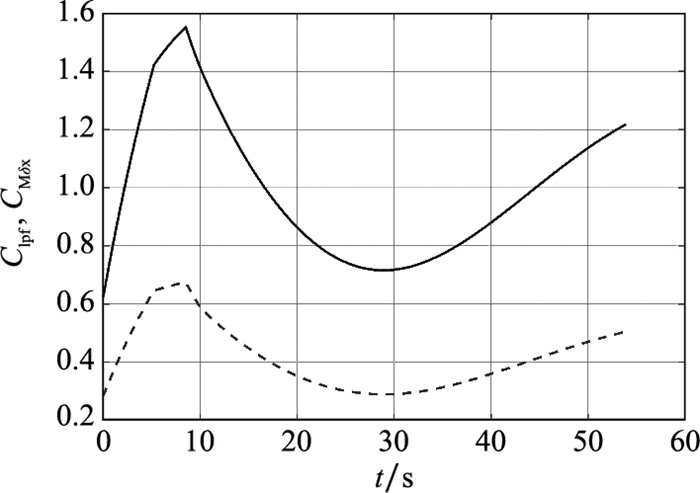

图8
滚转角指令、跟踪和观测值曲线"


图9
系统状态x2曲线"
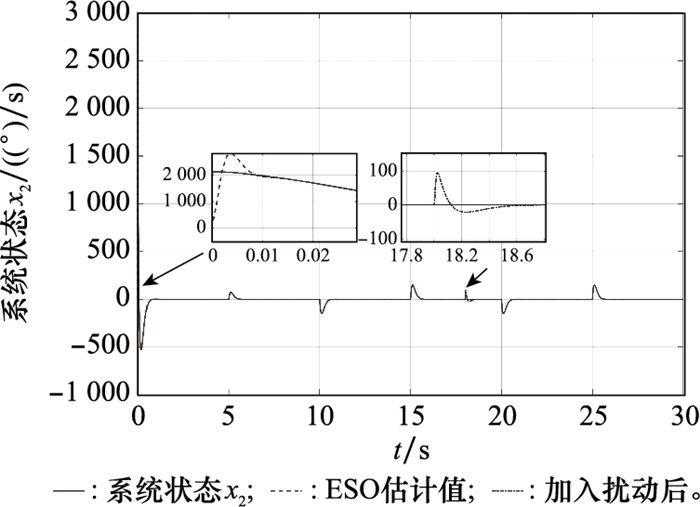
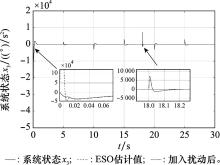
图10
系统状态x3曲线"
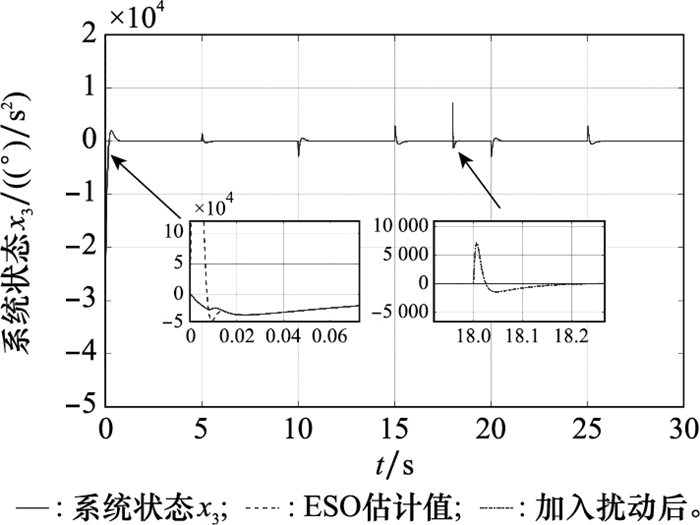

图11
干扰量及其观测值曲线"


图12
控制量曲线"


图13
参数摄动下滚转角跟踪曲线"


图14
参数摄动下控制量曲线"

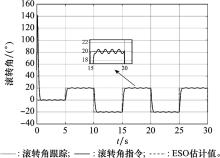
图15
滚转角指令、跟踪和观测值曲线"


图16
系统状态x2曲线"
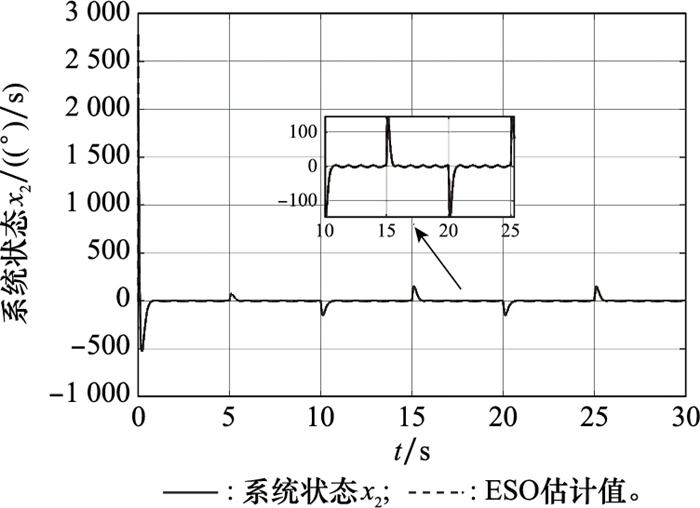
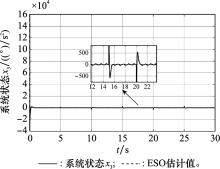
图17
系统状态x3曲线"


图18
干扰量及其观测值曲线"


图19
控制量曲线"


图20
不同控制器性能对比"

| 1 |
REGAN F J , SMITH J .Aeroballistics of a terminally corrected spinning projectile (TCSP)[J].Journal of Spacecraft and Rockets,1975,12(12):733-738.
doi: 10.2514/3.57041 |
| 2 | 王中原, 史金光, 常思江, 等.弹道修正弹技术发展综述[J].弹道学报,2021,33(2):1-12. |
| WANG Z Y , SHI J G , CHANG S J , et al.Review on development of technology of trajectory correction projectile[J].Journal of Ballistics,2021,33(2):1-12. | |
| 3 | 邢炳楠, 杜忠华, 杜成鑫.二维弹道修正弹及其制导控制技术综述[J].国防科技大学学报,2021,43(4):53-68. |
| XING B N , DU Z H , DU C X .Review on two-dimensional tra- jectory correction projectile and its guidance and control technology[J].Journal of National University of Defense Technology,2021,43(4):53-68. | |
| 4 | PARK W, RYOO C K, KIM Y, et al. A new practical guidance law for a guided projectile[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2011. |
| 5 |
TIPAN S , THEODOULIS S , THAI S , et al.Nonlinear dynamic inversion flight control design for guided projectiles[J].Journal of Guidance, Control, and Dynamics,2020,43(12):1-6.
doi: 10.2514/1.G002893.c1 |
| 6 | GAGNON E, LAUZON M. Course correction fuze concept analysis for in-service 155 mm spin-stabilized gunnery projectiles[C]// Proc. of the AIAA Guidance, Navigation & Control Conference & Exhibit, 2013. |
| 7 | 柯知非, 宋卫东.二维弹道修正组件发展现状及关键技术[J].飞航导弹,2018,(5):81-85. |
| KE Z F , SONG W D .Development status and key technologies of two-dimensional trajectory correction projectiles[J].Aerodynamic Missile Journal,2018,(5):81-85. | |
| 8 | 程杰, 于纪言, 王晓鸣, 等.隔转鸭舵式弹道修正弹电磁执行机构工况研究[J].兵工学报,2014,35(12):2010-2015. |
| CHENG J , YU J Y , WANG X M , et al.Research on working condition of electromagnetic actuator of trajectory correction projectile with decoupled canards[J].Acta Armamentarii,2004,35(12):2010-2015. | |
| 9 |
程杰, 王晓鸣, 于纪言, 等.隔转鸭舵式弹道修正弹双旋通道参数辨识[J].兵工学报,2016,37(10):1812-1819.
doi: 10.3969/j.issn.1000-1093.2016.10.007 |
|
CHENG J , WANG X M , YU J Y , et al.Parameter estimation of axial dual-spin system in a trajectory correction projectile with decoupled canards[J].Acta Armamentarii,2016,37(10):1812-1819.
doi: 10.3969/j.issn.1000-1093.2016.10.007 |
|
| 10 | 殷婷婷, 贾方秀, 于纪言, 等.双旋弹丸弹道修正组件控制响应模型研究[J].北京理工大学学报,2018,38(2):183-189. |
| YIN T T , JIA F X , YU J Y , et al.Roll control response model of the dual-spin trajectory correction component[J].Transactions of Beijing Institute of Technology,2018,38(2):183-189. | |
| 11 | 殷婷婷, 贾方秀, 于纪言, 等.基于扩张状态观测器的双旋弹丸舵翼转速预测控制[J].北京理工大学学报,2019,39(10):1057-1062, 1068. |
| YIN T T , JIA F X , YU J Y , et al.Direct model predictive rotating speed control for rudder in dual-spin projectile with output-feedback extended state observer[J].Transactions of Beijing Institute of Technology,2019,39(10):1057-1062, 1068. | |
| 12 | 张鑫, 姚晓先.固定翼双旋弹修正组件滚转控制研究[J].北京理工大学学报,2020,40(4):386-395. |
| ZHANG X , YAO X X .Roll control of course correction fuze for dual-spin projectile with fixed-canards[J].Transactions of Beijing Institute of Technology,2020,40(4):386-395. | |
| 13 | ILG M D. Guidance, navigation, and control for munitions[D]. Philadelphia: Drexel University, 2008. |
| 14 | 朱大林. 双旋弹飞行特性与制导控制方法研究[D]. 北京: 北京理工大学, 2015. |
| ZHU D L. Research on flight characteristics, guidance, and control for a dual-spin projectile[D]. Beijing: Beijing Institute of Technology, 2015. | |
| 15 |
ZHU D L , TANG S J , GUO J , et al.Flight stability of a dual-spin projectile with canards[J].Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2015,229(4):703-716.
doi: 10.1177/0954410014539293 |
| 16 | THEODOULIS S, GASSMAN V, BRUNNER T, et al. Robust bank-to-turn autopilot design for a class of 155 mm spin-stabilized canard-guided projectiles[C]//Proc. of the AIAA Atmospheric Flight Mechanics Conference, 2013. |
| 17 | SALMAN M U, CHANG B, ILG M D. Control of spinning flying vehicles utilizing partial body despin techniques[C]//Proc. of the 7th Asian Control Conference, 2009. |
| 18 | THEODOULIS S, GASSMAN V, BRUNNER T, et al. Fixed structure robust control design for the 155 mm canard-guided projectile roll-channel autopilot[C]//Proc. of the 21st Mediterranean Conference on Control & Automation Platanias-Chania, 2013. |
| 19 | 刘金琨.滑模变结构控制MATLAB仿真[M].北京: 清华大学出版社,2019. |
| LIU J K .Sliding mode control design and MATLAB simulation[M].Beijing: Tsinghua University Press,2019. | |
| 20 |
刘金琨, 孙富春.滑模变结构控制理论及其算法研究进展[J].控制理论与应用,2007,24(3):407-418.
doi: 10.3969/j.issn.1000-8152.2007.03.015 |
|
LIU J K , SUN F C .Research and development on theory and algorithms of sliding mode control[J].Control Theory & Applications,2007,24(3):407-418.
doi: 10.3969/j.issn.1000-8152.2007.03.015 |
|
| 21 |
UTKIN V I .Variable structure systems with sliding modes[J].IEEE Trans.on Automatic Control,1977,22(2):212-222.
doi: 10.1109/TAC.1977.1101446 |
| 22 |
YU X , KAYNAK O .Sliding-mode control with soft computing: a survey[J].IEEE Trans.on Industrial Electronics,2009,56(9):3275-3285.
doi: 10.1109/TIE.2009.2027531 |
| 23 |
LIU L , DING S H , YU X H .Second-order sliding mode control design subject to an asymmetric output constraint[J].IEEE Trans.on Circuits and Systems Ⅱ-Express Briefs,2021,68(4):1278-1282.
doi: 10.1109/TCSII.2020.3021715 |
| 24 |
LAGHROUCHE S , HARMOUCHE M , CHITOUR Y , et al.Barrier function-based adaptive higher order sliding mode controllers[J].Automatica,2021,123,109355.
doi: 10.1016/j.automatica.2020.109355 |
| 25 | 韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995,10(1):85-88. |
| HAN J Q .Extended state observer for a class of uncertain plants[J].Control and Decision,1995,10(1):85-88. | |
| 26 | HAN J Q , HUANG Y .Analysis and design for the second order nonlinear continuous extended states observer[J].Chinese Science Bulletin,2000,21(3):1938-1944. |
| 27 |
LIU C Q , LUO G Z , DUAN X L , et al.Adaptive LADRC-based disturbance rejection method for electromechanical servo system[J].IEEE Trans.on Industry Applications,2020,56(1):876-889.
doi: 10.1109/TIA.2019.2955664 |
| 28 |
LIU C Q , LUO G Z , CHEN Z , et al.Measurement delay compensated LADRC based current controller design for PMSM drives with a simple parameter tuning method[J].ISA Transactions,2020,101,482-492.
doi: 10.1016/j.isatra.2020.01.027 |
| 29 |
LU W Q , TANG B , JI K H , et al.A new load adaptive identification method based on an improved sliding mode observer for PMSM position servo system[J].IEEE Trans.on Power Electronics,2021,36(3):3211-3223.
doi: 10.1109/TPEL.2020.3016713 |
| 30 | WANG W W, GAO Z Q. A comparison study of advanced state observer design techniques[C]//Proc. of the American Control Conference, 2003. |
| 31 | IOANNOU P A , SUN J .Robust adaptive control[M].Upper Saddle River: PTR Prentice-Hall,1996. |
| [1] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [2] | 姜雨石, 陈旸, 高路, 蔡李根, 吕吉星. 重型运载火箭预设时间自适应控制[J]. 系统工程与电子技术, 2023, 45(8): 2570-2577. |
| [3] | 李方俊, 王生捷, 李俊峰, 李浩, 崔臣君. 基于新型趋近率的含齿隙随动系统鲁棒控制[J]. 系统工程与电子技术, 2023, 45(4): 1177-1184. |
| [4] | 陆浩然, 郑伟, 常晓华. 基于鲁棒精确微分器的分数阶滑模制导律设计[J]. 系统工程与电子技术, 2023, 45(1): 175-183. |
| [5] | 周梦平, 孟秀云, 刘俊辉. 大落角机动目标逆轨拦截最优滑模制导律设计[J]. 系统工程与电子技术, 2022, 44(9): 2886-2893. |
| [6] | 罗世彬, 李晓栋, 王忠森, 徐骋. 并联式运载器上升段广义超螺旋有限时间控制[J]. 系统工程与电子技术, 2022, 44(5): 1626-1635. |
| [7] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| [8] | 唐骁, 叶继坤, 李旭. 三维非线性预设性能制导律设计[J]. 系统工程与电子技术, 2022, 44(2): 619-627. |
| [9] | 杨文奇, 卢建华, 姜旭, 王元鑫. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. |
| [10] | 徐海祥, 胡聪, 余文曌, 姚国全. 输入约束下的浮力调节式UUV变深控制[J]. 系统工程与电子技术, 2022, 44(11): 3496-3504. |
| [11] | 郜中星, 彭斌, 陈小炜, 张勇刚. 振动陀螺椭圆参数的离散滑模控制[J]. 系统工程与电子技术, 2022, 44(1): 226-232. |
| [12] | 王晓海, 孟秀云, 周峰, 邱文杰. 基于偏置比例导引的落角约束滑模制导律[J]. 系统工程与电子技术, 2021, 43(5): 1295-1302. |
| [13] | 张跃坤, 贾晓洪, 张晓阳, 王炜强. 基于有限时间收敛干扰观测器的探导控一体化设计[J]. 系统工程与电子技术, 2021, 43(5): 1326-1334. |
| [14] | 郭佳晖, 蒋滨安, 田宗浩. 带有攻击角和视场角约束的制导炮弹导引律设计[J]. 系统工程与电子技术, 2021, 43(4): 1050-1056. |
| [15] | 孙世岩, 姜尚, 田福庆, 梁伟阁. 带多约束的多弹分布式自适应协同导引律[J]. 系统工程与电子技术, 2021, 43(1): 181-190. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||