
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (3): 747-754.doi: 10.12305/j.issn.1001-506X.2021.03.19
胡春宇1,2( ), 刘卫东1(), 于天翔1(), 周立尧2(), 冯晨2()
), 刘卫东1(), 于天翔1(), 周立尧2(), 冯晨2()
收稿日期:2020-06-19
出版日期:2021-03-01
发布日期:2021-03-16
作者简介:胡春宇(1987-), 男, 硕士研究生, 主要研究方向为军事指挥与导弹作战任务规划。E-mail:
Chunyu HU1,2(), Weidong LIU1(), Tianxiang YU1(), Liyao ZHOU2(), Chen FENG2()
Received:2020-06-19
Online:2021-03-01
Published:2021-03-16
摘要:
针对导弹部队多波次作战任务规划问题, 依据无人机的实时数据, 构建了基于路径的多层规划模型, 并设计了模型的算法求解流程。使用遗传算法与禁忌搜索混合算法, 得出了任务规划中的最优路径规划, 并在此基础上进行了冲突的消除。通过仿真案例表明, 用无人机协同配合导弹部队作战, 实时传输作战数据, 能够解决战场信息模糊不确定的问题; 使用多层规划模型能够为导弹多波次规划作战的路径进行科学的决策和选择。利用遗传算法和禁忌搜索混合算法, 能够避免局部最优导致无法输出结果的现象。
中图分类号:
胡春宇, 刘卫东, 于天翔, 周立尧, 冯晨. 基于无人机实时数据多波次任务规划模型分析[J]. 系统工程与电子技术, 2021, 43(3): 747-754.
Chunyu HU, Weidong LIU, Tianxiang YU, Liyao ZHOU, Chen FENG. Analysis of multi wave task planning model based on UAV real-time data[J]. Systems Engineering and Electronics, 2021, 43(3): 747-754.
表1
机动影响因子分析表"
| 编号 | 影响机动时间 | 代号 | 影响因子权重δ |
| 1 | 装备故障维修 | tb | 0.5 |
| 2 | 技术处置 | tc | 0.2 |
| 3 | 综合防抗 | td | 0.2 |
| 4 | 其他 | te | 0.1 |
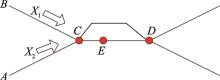
图1
某机动段“会车”示意图"
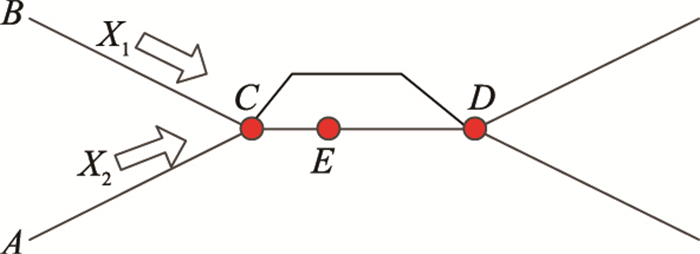
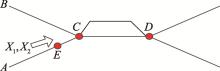
图2
某机动段“超车”示意图"
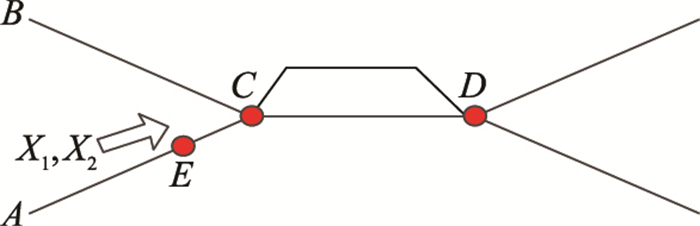
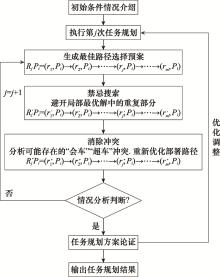
图3
算法流程设计"
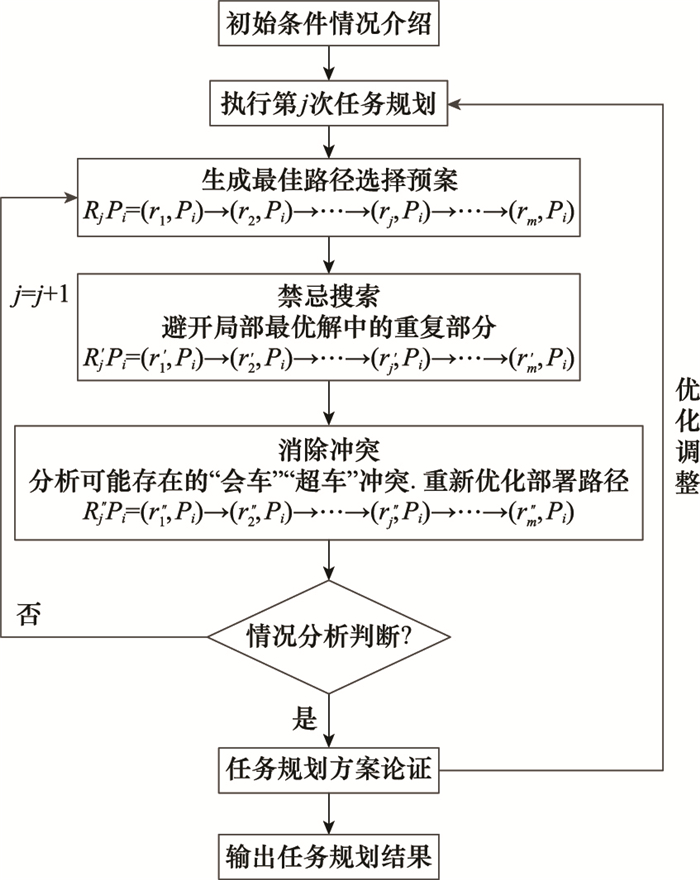

图4
染色体编码图"
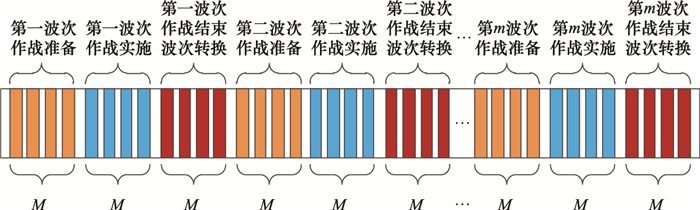
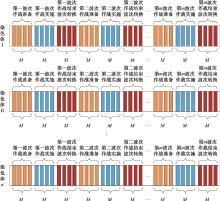
图5
初始父代染色体"
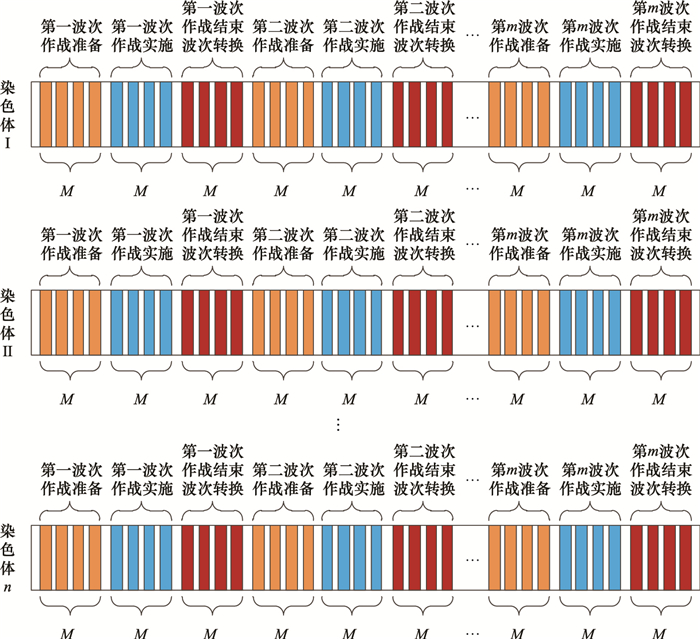
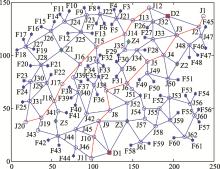
图6
作战阵地节点分布"
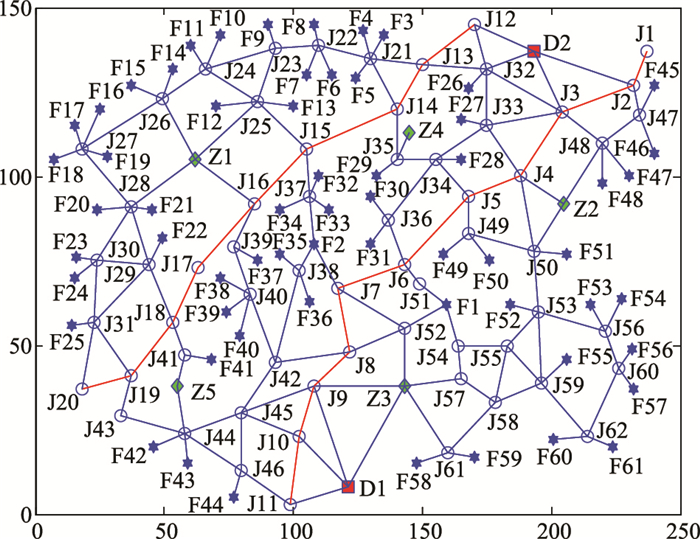
表2
初始规划方案"
| 装备序号 | 第一波次 | 第二波次 | 第N波次 | ||||
| 作战准备 | 作战实施 | 波次转换 | 作战实施 | 波次转换 | … | 待机 | |
| X1 | D2 | F32 | Z1 | F37 | Z1 | … | D2 |
| X2 | D2 | F33 | Z1 | F38 | Z1 | … | D2 |
| X3 | D2 | F34 | Z1 | F39 | Z1 | … | D2 |
| X4 | D2 | F48 | Z2 | F51 | Z2 | … | D2 |
| X5 | D2 | F47 | Z2 | F49 | Z2 | … | D2 |
| X6 | D2 | F46 | Z2 | F50 | Z2 | … | D2 |
| X7 | D1 | F38 | Z3 | F58 | Z3 | … | D1 |
| X8 | D1 | F39 | Z3 | F59 | Z3 | … | D1 |
| X9 | D1 | F40 | Z3 | F1 | Z3 | … | D1 |
| X10 | D2 | F3 | Z4 | F29 | Z4 | … | D2 |
| X11 | D2 | F4 | Z4 | F28 | Z4 | … | D2 |
| X12 | D2 | F5 | Z4 | F30 | Z4 | … | D2 |
| X13 | D1 | F44 | Z5 | F41 | Z5 | … | D1 |
| X14 | D1 | F42 | Z5 | F22 | Z5 | … | D1 |
| X15 | D1 | F43 | Z5 | F21 | Z5 | … | D1 |
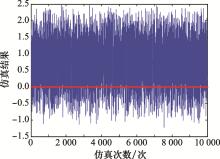
图7
备份路径距离在原路径距离12倍之间仿真结果"
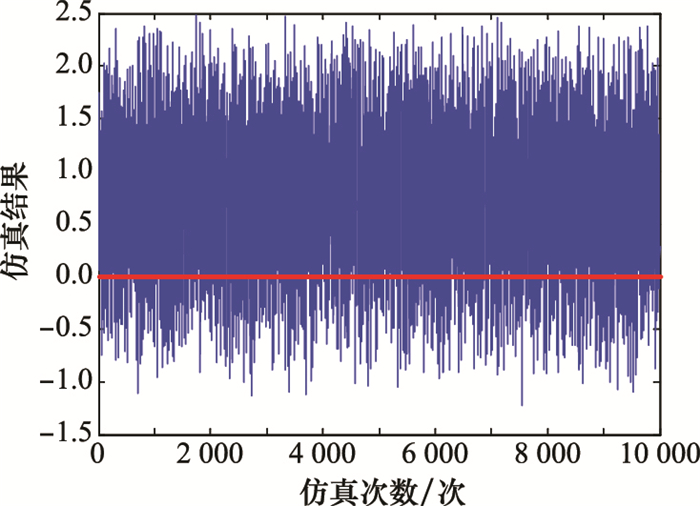
图8
备份路径距离在原路径距离2倍以上的仿真结果"
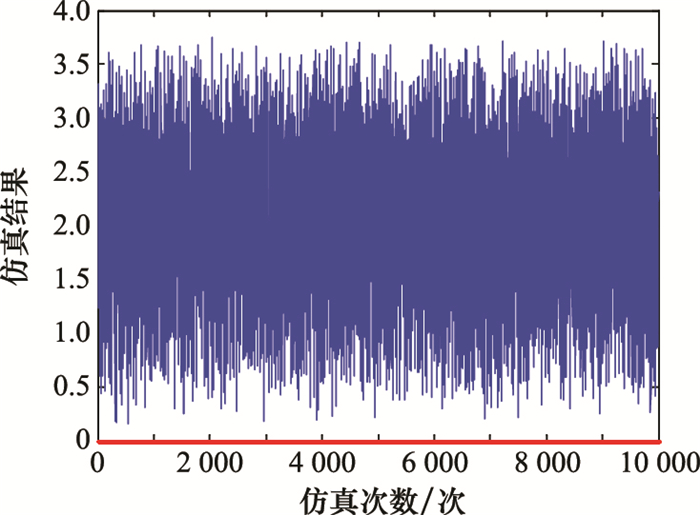

图9
超车冲突示意图"
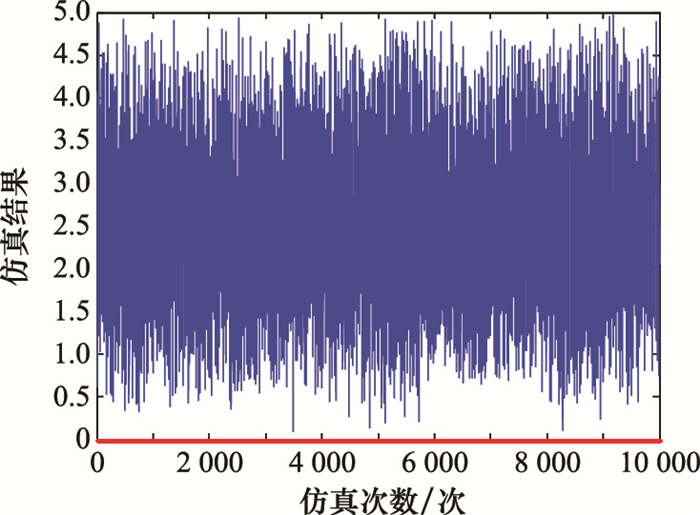
表3
部分任务规划最终路径规划方案"
| 装备序号 | 最优规划方案 |
| X1 | D2→J12→J13→J14→J15→J37→F32(第一波次)→J37→J15→J16→Z1→J16→J39→F37(第二波次)→…→(第Y波次)D2 |
| X2 | D2→J12→J13→J14→J15→J37→F33(第一波次)→J37→J15→J16→Z1→J16→J39→J40→F38(第二波次)→…→(第Y波次)D2 |
| X3 | D2→J12→J13→J14→J15→J37→F34(第一波次)→J37→J15→J16→Z1→J16→J39→J40→F39(第二波次)→…→(第Y波次)D2 |
| X4 | D2→J3→J48→F48(第一波次)→J48→Z2→J50→F51→…→(第Y波次)D2 |
| X5 | D2→J3→J48→F47(第一波次)→J48→Z2→J50→J49→F49(第二波次)→…→(第Y波次)D2 |
| X6 | D2→J3→J48→J47→F46(第一波次)→J47→J48→Z2→J50→J49(第二波次)→F50→…→(第Y波次)D2 |
| X7 | D1→J10→J45→J42→J40→F38(第一波次)→J40→J42→J8→J52→Z3→J61→F58(第二波次)→…→(第Y波次)D1 |
| X8 | D1→J10→J45→J42→J40→F39(第一波次)→J40→J42→J8→J52→Z3→J61→F59(第二波次)→…→(第Y波次)D1 |
| X9 | D1→J10→J45→J42→J40→F40(第一波次)→J40→J42→J8→J52→Z3→J52→F1(第二波次)→…→(第Y波次)D1 |
| X10 | D2→J12→J13→J21→F3(第一波次)→J21→J14→J35→Z4→J35→F29(第二波次)→…→(第Y波次)D2 |
| X11 | D2→J12→J13→J21→F4(第一波次)→J21→J14→J35→Z4→J35→J34→F28(第二波次)→…→(第Y波次)D2 |
| X12 | D2→J12→J13→J21→F5(第一波次)→J21→J14→J35→Z4→J35→J34→J36→F30(第二波次)→…→(第Y波次)D2 |
| X13 | D1→J11→J46→F44(第一波次)→J46→J44→Z5→J41→F41(第二波次)→…→(第Y波次)D1 |
| X14 | D1→J11→J46→J44→F42(第一波次)→J44→Z5→J41→J18→J29→F22(第二波次)→…→(第Y波次)D1 |
| X15 | D1→J11→J46→J44→F43(第一波次)→J44→Z5→J41→J18→J29→J28→F21(第二波次)→…→(第Y波次)D1 |
| 1 |
SHAN J C , LIU Q B . Analysis of the impact of battlefield environment on military operation effectiveness using fuzzy influence diagram[J]. International Journal of Fuzzy Systems, 2019, 21 (6): 1882- 1893.
doi: 10.1007/s40815-019-00662-6 |
| 2 |
CANDACE F , RONALD L J . Principle assumptions ofregression analysis: testing, techniques, and statistical reporting of imperfect data sets[J]. Advances in Developing Human Resources, 2019, 21 (4): 484- 502.
doi: 10.1177/1523422319869915 |
| 3 | ZHANG Y, WANG J W, YUAN B. Research on multi-satellite observation multi-region task planning based on genetic algorithm[C]//Proc.of the 3rd International Conference on Aerospace Technology, Communications and Energy Systems, 2019. |
| 4 | BAI X S , CAO M , YAN W S , et al. Efficient Heuristic algorithms for single-vehicle task planning with precedence constraints[J]. IEEE Trans.on Cybernetics, 2020, 4 (1): 1- 10. |
| 5 |
YAN F L . Gauss interference ant colony algorithm-based optimization of UAV mission planning[J]. The Journal of Supercomputing, 2020, 76 (2): 1170- 1179.
doi: 10.1007/s11227-018-2540-1 |
| 6 |
YAN F , ZHU X P , ZHOU Z , et al. Heterogeneous multi-unmanned aerial vehicle task planning: simultaneous attacks on targets using the Pythagorean hodograph curve[J]. Proceedings of the Institution of Mechanical Engineers, 2019, 233 (13): 4735- 4749.
doi: 10.1177/0954410019829368 |
| 7 |
YAO F , LI J T , CHEN Y N , et al. Task allocation strategies for cooperative task planning of multi-autonomous satellite constellation[J]. Advances in Space Research, 2019, 63 (2): 1073- 1084.
doi: 10.1016/j.asr.2018.10.002 |
| 8 |
赵国宏. 作战任务规划若干问题再认识[J]. 指挥与控制学报, 2017, 3 (4): 265- 272.
doi: 10.3969/j.issn.2096-0204.2017.04.0265 |
|
ZHAO G H . Some problems of combat mission planning[J]. Journal of Command and Control, 2017, 3 (4): 265- 272.
doi: 10.3969/j.issn.2096-0204.2017.04.0265 |
|
| 9 |
谢苏明, 毛万峰, 李杏. 关于作战筹划与作战任务规划[J]. 指挥与控制学报, 2017, 3 (4): 281- 285.
doi: 10.3969/j.issn.2096-0204.2017.04.0281 |
|
XIE S M , MAO W F , LI X . Combat planning and mission planning[J]. Journal of Command and Control, 2017, 3 (4): 281- 285.
doi: 10.3969/j.issn.2096-0204.2017.04.0281 |
|
| 10 | 王桐, 杨萍, 欧阳海波. 基于马尔可夫链的多波次导弹作战研究[J]. 战术导弹技术, 2011, (4): 20- 22. |
| WANG T , YANG P , OUYANG H B . Research on multi wave missile operations based on Markov chain[J]. Tactical Missile Technology, 2011, (4): 20- 22. | |
| 11 | 汪民乐, 房茂燕. 基于改进单亲GA的多波次攻击最优火力分配[J]. 系统仿真学报, 2009, 21 (23): 7697- 7702. |
| WANG M L , FANG M Y . Optimal fire distribution of multi wave attack based on improved single parent GA[J]. Journal of System Simulation, 2009, 21 (23): 7697- 7702. | |
| 12 | 汪宁丽, 王利平, 马豪杰, 等. 多波次导弹发射中的规划问题[J]. 数学的实践与认识, 2018, 48 (15): 247- 254. |
| WANG N L , WANG L P , MA H J , et al. Planning problems in multi-wave missile launching[J]. Practice and Understanding of Mathematics, 2018, 48 (15): 247- 254. | |
| 13 | 周梦源, 逯伯亮, 李海友, 等. 多波次导弹发射中的规划问题[J]. 数学的实践与认识, 2018, 48 (15): 265- 275. |
| ZHOU M Y , YUN B L , LI H Y , et al. Planning problems in multi-wave missile launching[J]. Mathematical Practice and Understanding, 2018, 48 (15): 265- 275. | |
| 14 | 孙茜. 多波次导弹发射中的规划问题[J]. 陕西理工大学学报(自然科学版), 2019, 35 (3): 81- 87. |
| SUN Q . Planning problems in multi-wave missile launching[J]. Journal of Shaanxi University of Science and Technology (Natural Science Edition), 2019, 35 (3): 81- 87. | |
| 15 |
周爽, 邱涛. 多波次导弹发射中的规划问题[J]. 农业装备与车辆工程, 2018, 56 (11): 52- 55, 60.
doi: 10.3969/j.issn.1673-3142.2018.11.012 |
|
ZHOU S , QIU T . Planning in multi-wave missile launch[J]. Agricultural Equipment and Vehicle Engineering, 2018, 56 (11): 52- 55, 60.
doi: 10.3969/j.issn.1673-3142.2018.11.012 |
|
| 16 | SURAFEL L T . Feasibility reduction approach for hierarchical decision making with multiple objectives[J]. Operations Research Perspectives, 2019, 35 (3): e21- e28. |
| 17 |
NAYAK S , OJHA A . On multi-level multi-objective linear fractional programming problem with interval parameters[J]. RAIRO-Operations Research, 2019, 53 (5): 1601- 1616.
doi: 10.1051/ro/2018063 |
| 18 | 高金伍.不确定多层规划模型与算法[D].北京: 清华大学, 2005. |
| GAO J W. Uncertain multilevel programming model and algorithm[D]. Beijing: Tsinghua University, 2005. | |
| 19 |
JANA D K , PRAMANIK S , MAITI M . Mean and CV reduction methods on Gaussian type-2 fuzzy set and its application to a multilevel profit transportation problem in a two-stage supply chain network[J]. Neural Computing and Applications, 2017, 28 (9): 2703- 2726.
doi: 10.1007/s00521-016-2202-2 |
| 20 |
REDDY D S , BABU K V G , MURTHY D L N , et al. Transportation planning aspects of a smart city-case study of GIFT city, gujarat[J]. Transportation Research Procedia, 2016, 17, 134- 144.
doi: 10.1016/j.trpro.2016.11.069 |
| 21 |
BRETT R A . Fixing the supply problem[J]. The Journal of Thoracic and Cardiovascular Surgery, 2018, 156 (3): 1037- 1037.
doi: 10.1016/j.jtcvs.2018.04.016 |
| 22 | LI J . Researchers at Hebei normal university have reported new data on chemical engineering (a multi-level programming for shale gas-water supply chains accounting for tradeoffs between economic and environmental concerns)[J]. Energy & Ecology, 2020, 4 (3): 69- 77. |
| 23 | CHEN Y Z , CHENG X , LI J , et al. A multi-level programming for shale gas-water supply chains accounting for tradeoffs between economic and environmental concerns[J]. Computers and Chemical Engineering, 2020, 135 (4): 35- 44. |
| 24 |
YANG H , MICHALE G H B . Transport bilevel programming problems: recent methodological advances[J]. Transportation Research: Part B, 2001, 35 (1): 1- 4.
doi: 10.1016/S0191-2615(00)00025-4 |
| 25 |
WU S H , YANG Z Z . Optimizing location of manufacturing industries in the context of economic globalization: a bi-level model based approach[J]. Physica A: Statistical Mechanics and its Applications, 2018, 501, 327- 337.
doi: 10.1016/j.physa.2018.02.042 |
| 26 | MERKLE D , MIDDENDORF M , DORIGO M , et al. Ant co-lony optimization 2004 MIT press 0-262-04219-3[J]. European Journal of Operational Research, 2004, 168 (1): 269- 271. |
| 27 |
ZITAR A , NUSEIRAT A F . Performance evaluation of genetic algorithms and evolutionary programming in optimization and machine learning[J]. Cybernetics and Systems, 2002, 33 (3): 203- 223.
doi: 10.1080/019697202753551611 |
| 28 | 邓键.双层规划若干问题的解法[D].吉林: 吉林大学, 2009. |
| DENG J. Solutions to some problems of bilevel programming[D]. Jilin: Jilin University, 2009. | |
| 29 |
EMMANOUIL E , ZACHARIADI S , CHRIS T , et al. A strategy for reducing the computational complexity of local search-based methods for the vehicle routing problem[J]. Computers and Operations Research, 2010, 37 (12): 2089- 2105.
doi: 10.1016/j.cor.2010.02.009 |
| 30 |
TAVAKKOLI M R , SAREMI A R , ZIAEE M S . A memetic algorithm for a vehicle routing problem with backhauls[J]. Applied Mathematics and Computation, 2006, 181 (2): 1049- 1060.
doi: 10.1016/j.amc.2006.01.059 |
| 31 | HORBULIN V P , HULIANYTSKYI L F , SERGIENKO I V . Optimization of UAV team routes in the presence of alternative and dynamic depots[J]. Cybernetics and Systems Analysis, 2020, 56 (8): 195- 203. |
| [1] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [2] | 余婧, 雍恩米, 陈汉洋, 郝东, 张显才. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44(9): 2849-2857. |
| [3] | 徐星光, 王晓峰, 姚璐, 任章. 固定翼无人机编队构型与通信拓扑优化[J]. 系统工程与电子技术, 2022, 44(9): 2936-2946. |
| [4] | 杨建峰, 肖和业, 李亮, 白俊强, 董维浩. 基于模糊聚类和专家评分机制的无人机多层次模块划分方法[J]. 系统工程与电子技术, 2022, 44(8): 2530-2539. |
| [5] | 骆天溯, 赵灵峰, 冯蕴雯, 薛小锋, 路成. 基于METRIC理论的超大规模卫星星座多级备份策略[J]. 系统工程与电子技术, 2022, 44(7): 2181-2190. |
| [6] | 李波, 周家豪, 刘民岷, 朱品朝. 基于改进NSGA3的焊接缺陷评估特征选择[J]. 系统工程与电子技术, 2022, 44(7): 2211-2218. |
| [7] | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-2262. |
| [8] | 杨少龙, 黄金, 向先波, 李伟超. 基于置信椭圆的无人艇区域覆盖搜寻规划优化[J]. 系统工程与电子技术, 2022, 44(7): 2263-2269. |
| [9] | 冯蕴雯, 陈俊宇, 路成. 民用飞机多地域航材支援网络模型研究[J]. 系统工程与电子技术, 2022, 44(5): 1553-1561. |
| [10] | 卢元杰, 刘志敏, 孙智孝, 阚东. 基于模型的无人机系统架构综合评估方法[J]. 系统工程与电子技术, 2022, 44(4): 1239-1245. |
| [11] | 靳鹏, 唐晓茜. 考虑合成机制的多星应急任务调度[J]. 系统工程与电子技术, 2022, 44(4): 1270-1281. |
| [12] | 孙剑炜, 王超, 施庆展, 任文博, 尧泽昆, 袁乃昌. 基于遗传算法的相位调制波形智能优化[J]. 系统工程与电子技术, 2022, 44(3): 722-729. |
| [13] | 李洪瑶, 李小强, 韩心中, 谢学立, 席建祥. 基于决策融合的多无人机协同目标检测识别算法[J]. 系统工程与电子技术, 2022, 44(3): 746-754. |
| [14] | 张源原, 高阳, 朱鹏, 刘锦涛, 谷树山. 基于着色Petri网的无人机侦察战术规划[J]. 系统工程与电子技术, 2022, 44(3): 900-907. |
| [15] | 庞维建, 李辉, 黄谦, 李朋, 马贤明. 基于本体的无人系统任务规划研究综述[J]. 系统工程与电子技术, 2022, 44(3): 908-920. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||