
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (12): 3995-4004.doi: 10.12305/j.issn.1001-506X.2023.12.30
• 制导、导航与控制 • 上一篇
宋超, 李波, 马云红, 黄晶益
收稿日期:2022-09-05
出版日期:2023-11-25
发布日期:2023-12-05
通讯作者:
李波
作者简介:宋超(1995—), 男, 博士研究生, 主要研究方向为无人机智能航迹规划、无人机协同智能决策基金资助:Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG
Received:2022-09-05
Online:2023-11-25
Published:2023-12-05
Contact:
Bo LI
摘要:
针对传统A*算法在二维无人机(unmanned aerial vehicle, UAV)航迹规划中存在的不足, 提出了一种优化A*算法与模型预测控制融合的三维UAV航迹规划方法。通过压缩搜索空间和平滑处理, 提出了一种基于三维空间的优化A*算法, 综合考虑全局规划与实时避障需求, 构建了优化A*算法与模型预测控制的融合算法。仿真验证表明, 融合算法能够实现三维复杂环境下UAV实时避障航迹规划, 搜索节点少, 路径长度短且更加平滑, 具有很好的环境适应性。
中图分类号:
宋超, 李波, 马云红, 黄晶益. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995-4004.
Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm[J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004.
图1
静态障碍物示意图"

图2
突发障碍物示意图"
图3
无人机防碰撞球形安全区示意图"
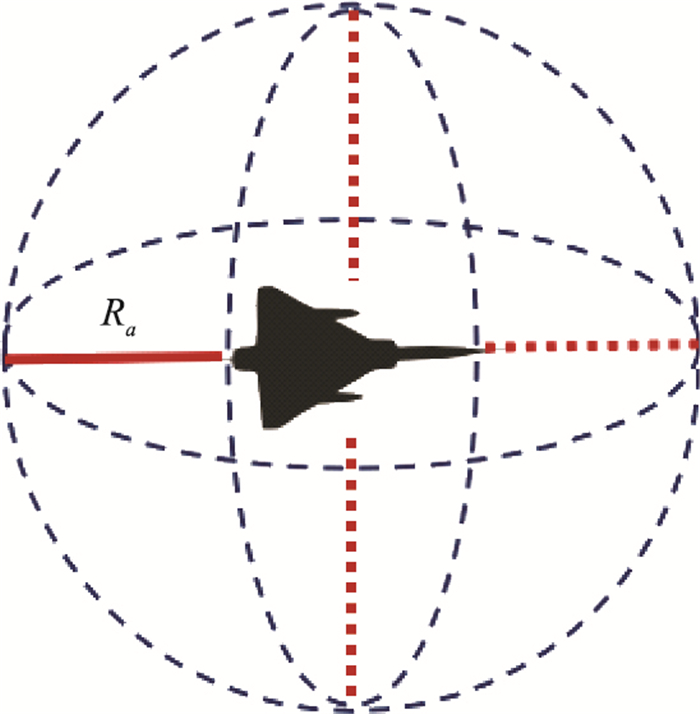
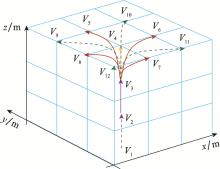
图4
三维空间可扩展节点示意图"

图5
无人机航迹连续曲线优化示意图"
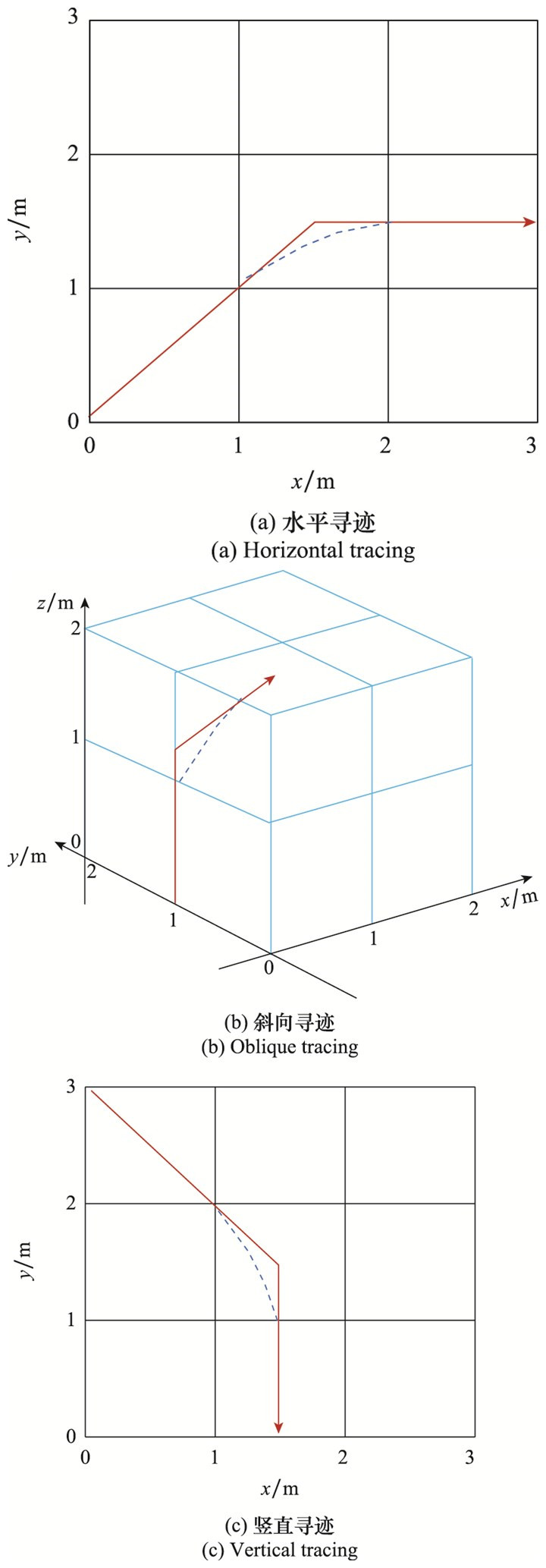
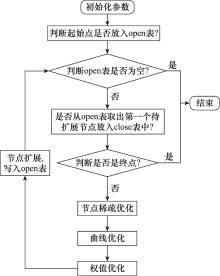
图6
优化A*算法流程图"
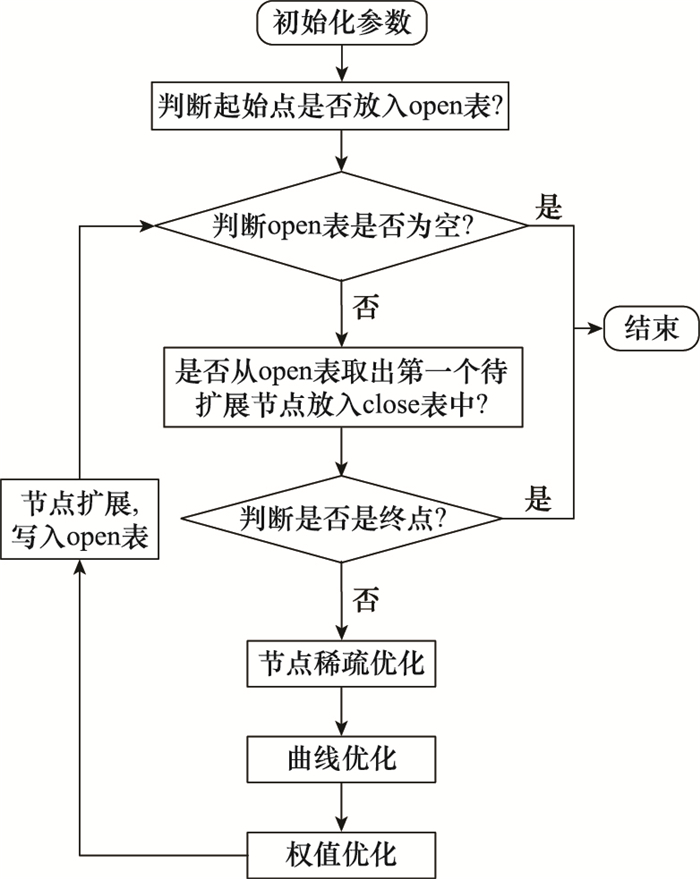
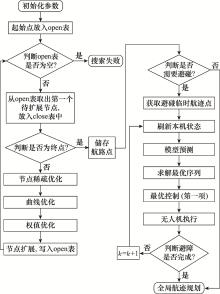
图7
基于融合算法的无人机航迹规划流程图"
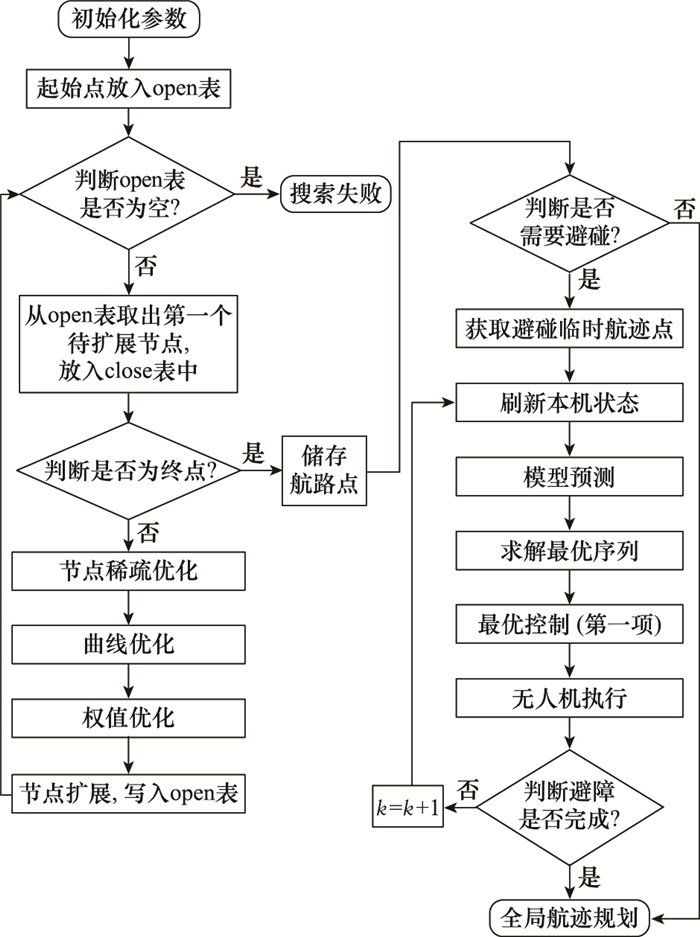
表1
系统参数初始化"
| 参数 | 数值 |
| 无人机起始位置/m | (0, 0, 0) |
| 无人机速度/(m·s-1) | 25 |
| 目标位置/m | (380, 450, 415) |
| 最大偏航角/(°) | 45 |
| 最大俯仰角/(°) | 45 |
| 最小转弯半径/m | 10 |
| 权值因子a | 0.85 |
| 权值因子b | 0.15 |
| 状态量个数 | 3 |
| 控制量个数 | 2 |
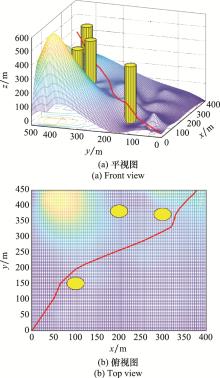
图8
基于传统A*算法的无人机航迹规划"
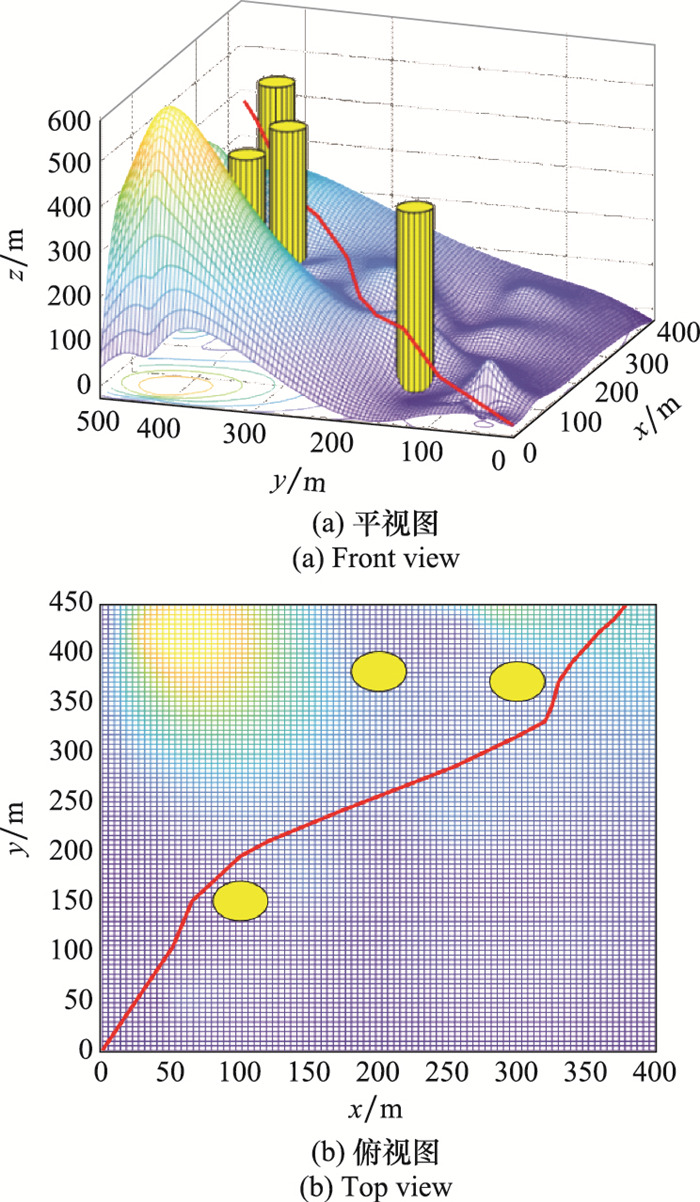
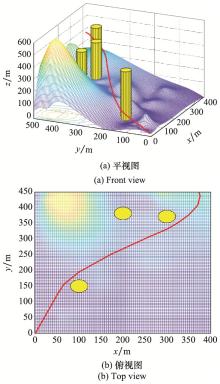
图9
基于稀疏A*算法无人机航迹规划"
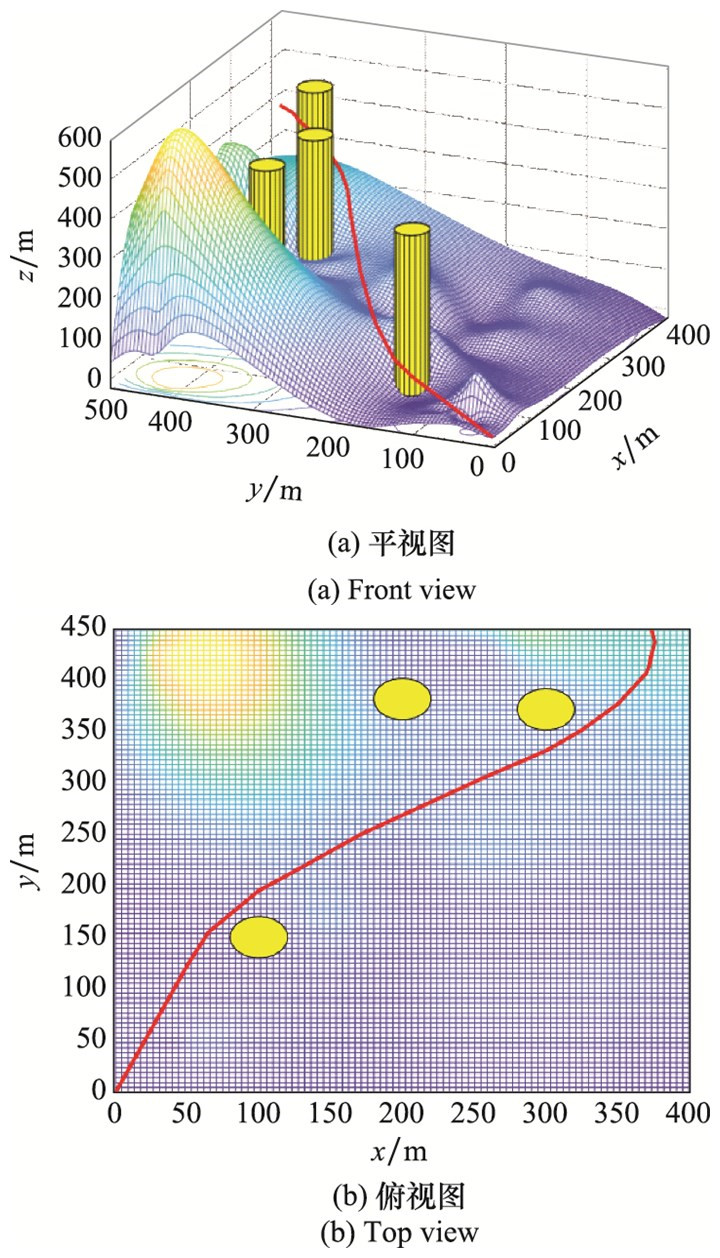
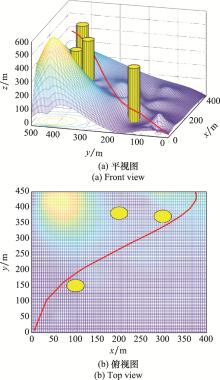
图10
基于优化A*算法无人机航迹规划"
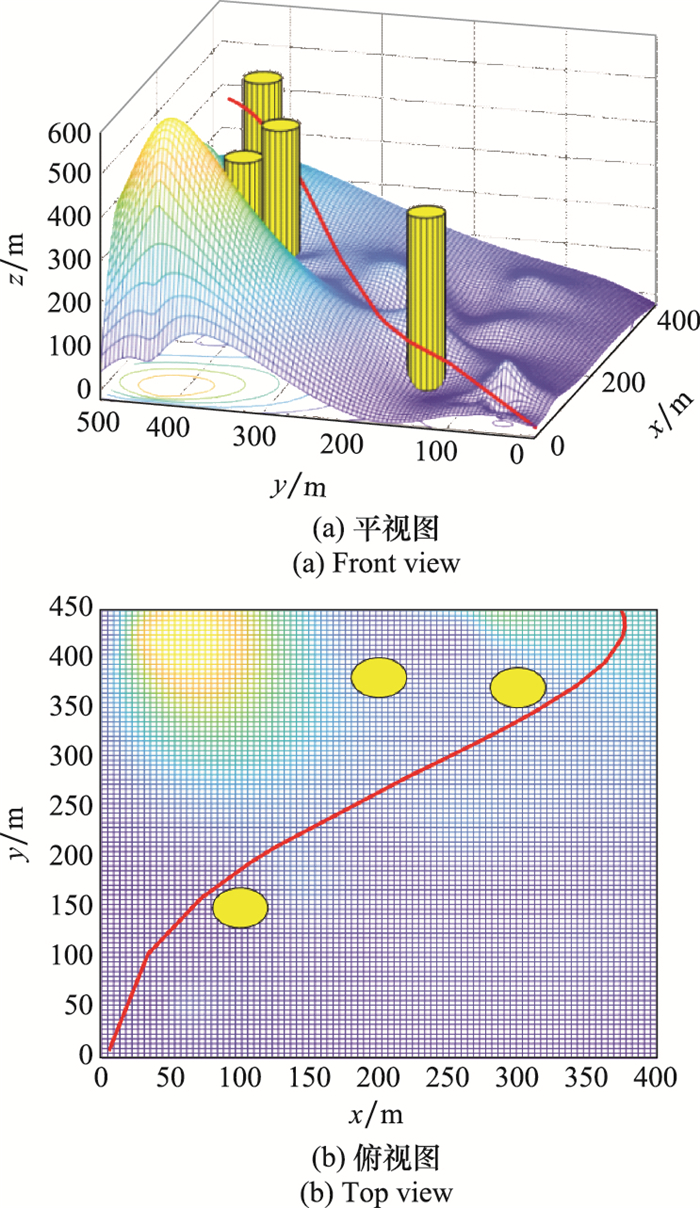
表2
基于A*算法无人机航迹规划数据对比"
| 类型 | 节点数量/个 | 规划时间/s | 航程/m |
| 传统A*算法 | 50 | 2.78 | 1 125 |
| 稀疏A*算法 | 39 | 2.45 | 1 105 |
| 优化A*算法 | 36 | 2.35 | 1 044 |
表3
突发障碍物1信息"
| 序号 | 位置坐标/m | 半径/m |
| 1 | (210, 280, 175) | 50 |

图11
优化A*算法与融合算法无人机航迹规划对比实验"

表4
突发障碍物2信息"
| 序号 | 位置坐标 | 半径 |
| 1 | (240, 235, 160) | 50 |

图12
复杂环境下基于优化A*算法与融合算法的无人机避障航迹规划对比实验"
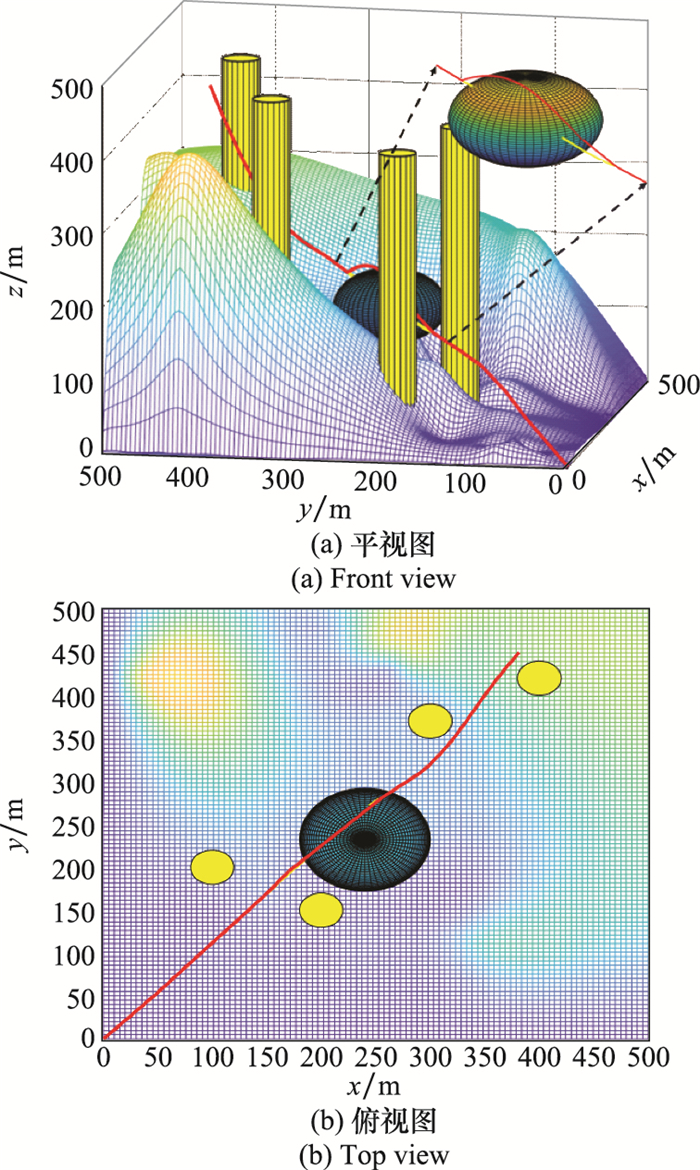
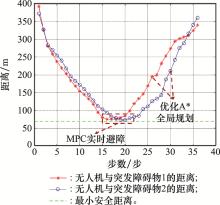
图13
基于融合算法的无人机与突发障碍物实时距离"
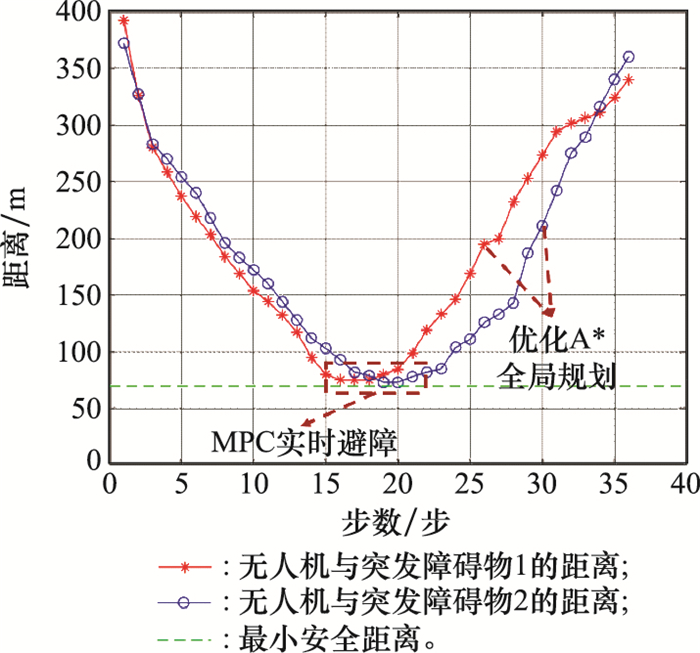
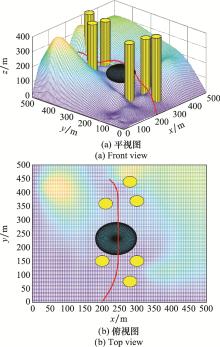
图14
基于变目标点复杂环境下的无人机避障航迹规划"
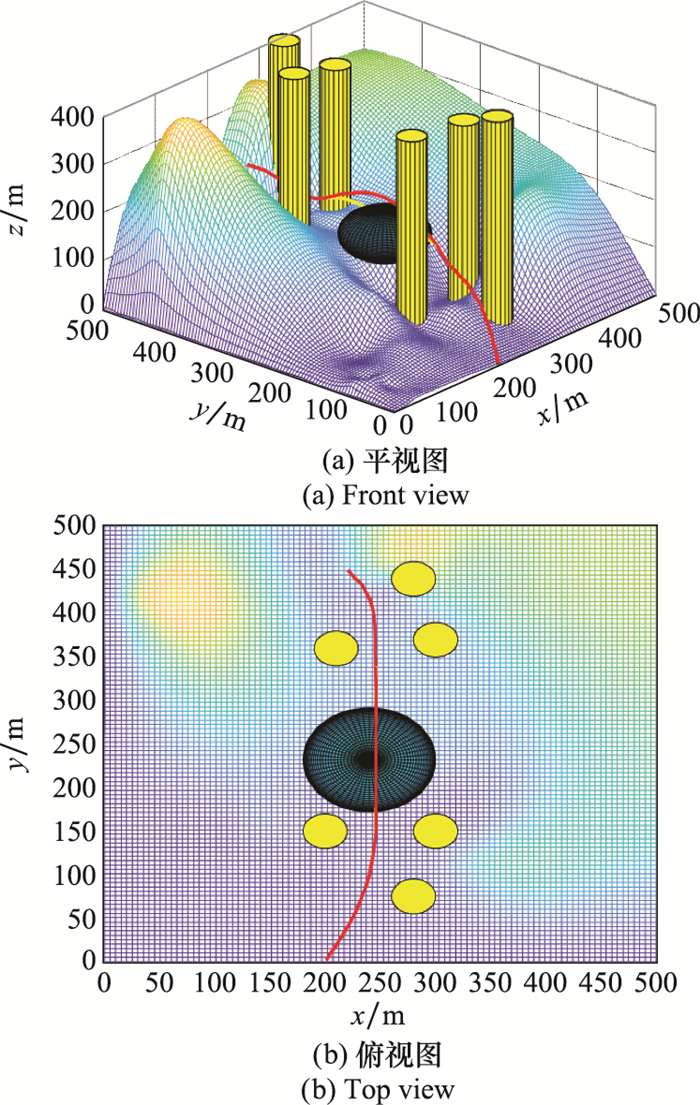
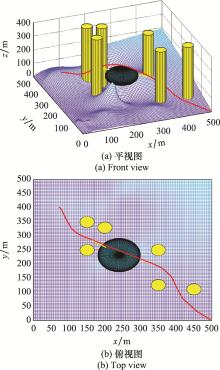
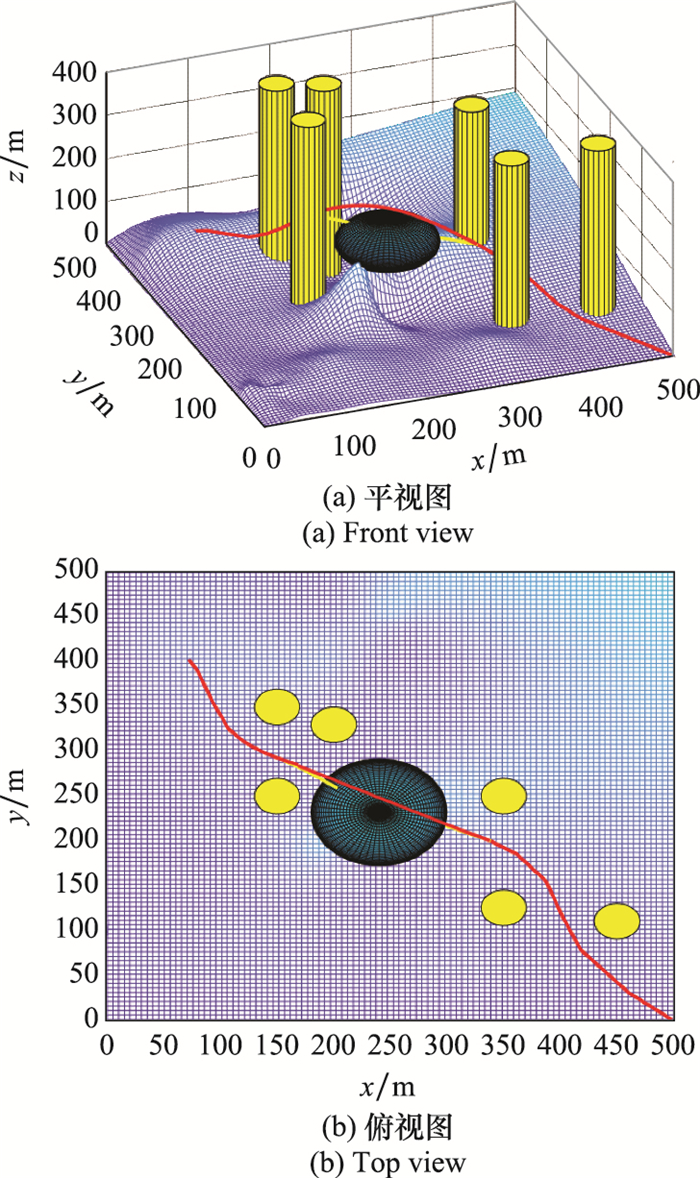
图15
基于复杂变化环境下的无人机避障航迹规划"
| 1 | SONG R, LONG T, WANG Z, et al. Multi-UAV cooperative target tracking method using sparse a search and standoff tracking algorithms[C]//Proc. of the IEEE CSAA Guidance, Navigation and Control Conference, 2018. DOI: 10.1109/GNCC42960.2018.9019171. |
| 2 | SONG Y J, XING X J, XI Q B, et al. Route planning method for UAV in unknown environment based on improved SAS algorithm[C]//Proc. of the Chinese Control and Decision Confe-rence, 2020: 3163-3168. |
| 3 |
SHAO S K , SHI W L , ZHAO Y J , et al. A new method of solving UAV trajectory planning under obstacles and multi-constraint[J]. IEEE Access, 2021, 9, 161161- 161180.
doi: 10.1109/ACCESS.2021.3132650 |
| 4 | ZHANG C J, MENG X Y. Spare A* search approach for UAV route planning[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2017: 413-417. |
| 5 | 绳红强, 黄海英, 崔毅刚. 基于A*蚁群融合算法的避障路径规划研究[J]. 机电工程技术, 2022, 51 (7): 45- 49. |
| SHENG H Q , HUANG H Y , CUI Y G . Research on obstacle avoidance path planning based on A* ant colony fusion algorithm[J]. Mechatronic Engineering Technology, 2022, 51 (7): 45- 49. | |
| 6 |
NIU Z J , JIA X H , YAO W . Communication free MPC based neighbors trajectory prediction for distributed multi-UAV motion planning[J]. IEEE Access, 2022, 10, 13481- 13489.
doi: 10.1109/ACCESS.2022.3148145 |
| 7 | CAO Y, LONG T, WANG Z, et al. Aircraft route planning for stealth penetration based on sparse A* search[C]//Proc. of the 29th Chinese Control and Decision Conference, 2017: 5380-5385. |
| 8 | 薄宁, 李相民, 代进进, 等. 基于变步长稀疏A*搜索和MPC的多无人机层次化协同航迹规划[J]. 指挥控制与仿真, 2018, 40 (2): 65- 71. |
| BO N , LI X M , DAI J J , et al. Hierarchical cooperative multi-UAV track planning based on variable-step sparse A* search and MPC[J]. Command, Control and Simulation, 2018, 40 (2): 65- 71. | |
| 9 | 张志文, 张鹏, 毛虎平, 等. 改进A*算法的机器人路径规划研究[J]. 电光与控制, 2021, 28 (4): 21- 25. |
| ZHANG Z W , ZHANG P , MAO H P , et al. Research on improved A* algorithm for robot path planning[J]. Electronics Optics & Control, 2021, 28 (4): 21- 25. | |
| 10 | WANG Z, LIU L, LONG T, et al. Enhanced sparse A* search for UAV path planning using dubins path estimation[C]//Proc. of the 33rd Chinese Control Conference, 2014: 738-742. |
| 11 |
KIM D J , JEONG Y W , CHUNG C C . Lateral vehicle trajectory planning using a model predictive control scheme for an automated perpendicular parking system[J]. IEEE Trans.on Industrial Electronics, 2023, 70 (2): 1820- 1829.
doi: 10.1109/TIE.2022.3163567 |
| 12 | 张阳伟, 乔越, 李成凤. 基于四叉树栅格环境的变步长双向A*算法[J]. 控制工程, 2021, 28 (10): 1960- 1966. |
| ZHANG Y W , QIAO Y , LI C F . A variable-step bidirectional A* algorithm based on a quadtree raster environment[J]. Control Engineering of China, 2021, 28 (10): 1960- 1966. | |
| 13 | 张浩杰, 张玉东, 梁荣敏, 等. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45 (2): 513- 520. |
| ZHANG H J , ZHANG Y D , LIANG R M , et al. Improved A* algorithm for optimal path planning method for robot energy consumption[J]. Systems Engineering and Electronics, 2023, 45 (2): 513- 520. | |
| 14 | VEKSLER A , JOHANSEN T A , BORRELLI F , et al. Dynamic positioning with model predictive control[J]. IEEE Trans.on Control Systems Technology, 2016, 24 (4): 1340- 1353. |
| 15 | MAXIM A, CARUNTU C F, LAZAR C. Cruise and headway control for vehicle platooning using a distributed model predictive control algorithm[C]//Proc. of the 21st International Conference on System Theory, Control and Computing, 2017: 146-151. |
| 16 | MERABTI H, BOUCHACHI I, BELARBI K. Nonlinear model predictive control of quadcopter[C]//Proc. of the 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, 2015: 208-211. |
| 17 | 李晓辉, 苗苗, 冉保健, 等. 基于改进A*算法的无人机避障路径规划[J]. 计算机系统应用, 2021, 30 (2): 255- 259. |
| LI X H , MIAO M , RAN B J , et al. UAV obstacle avoidance path planning based on improved A* algorithm[J]. Computer System Applications, 2021, 30 (2): 255- 259. | |
| 18 | CHOWDHURY M I, SCHWARTZ D G. The PRM-A path planning algorithm for UAVs: an application to navy mission planning[C]//Proc. of the Conference on Global Oceans, 2020. DOI: 10.1109/IEEECONF38699.2020.9388987. |
| 19 | LI X X, HU X G, WANG Z Q, et al. Path planning based on combination of improved A-STAR algorithm and DWA algorithm[C]//Proc. of the 2nd International Conference on Artificial Intelligence and Advanced Manufacture, 2020: 99-103. |
| 20 | WANG Y H, ZHANG W J, ZHOU T X. Path planning of surface unmanned craft based on variable step-length sparse A-star algorithm[C]//Proc. of the 33rd Chinese Control and Decision Conference, 2021: 1917-1920. |
| 21 | 牛佳伟. 基于协同A*算法的多无人机航迹规划[J]. 舰船电子工程, 2021, 41 (9): 66- 68. |
| NIU J W . Multi-UAV track planning based on cooperative A* algorithm[J]. Ship Electronic Engineering, 2021, 41 (9): 66- 68. | |
| 22 | 范铮铮, 王正平, 葛佳昊. 基于A*算法的多无人机实时打击航迹规划[J]. 战术导弹技术, 2021, (5): 94-101, 112. |
| FAN Z Z , WANG Z P , GE J H . Real-time multi-UAV strike trajectory planning based on A* algorithm[J]. Tactical Missile Technology, 2021, (5): 94-101, 112. | |
| 23 | HU C, ZHOU X L, DOU R, et al. Combined fast control of drifting state and trajectory tracking for autonomous vehicles based on MPC controller[C]//Proc. of the International Conference on Robotics and Automation, 2022: 1373-1379. |
| 24 | SHAO S K , HE C L , ZHAO Y J , et al. Efficient trajectory planning for UAVs using hierarchical optimization[J]. IEEE Access, 2021, 9, 60668- 60681. |
| 25 | TENGESDAL T , JOHANSEN T A , GRANDE T D , et al. Ship collision avoidance and anti grounding using parallelized cost evaluation in probabilistic scenario-based model predictive control[J]. IEEE Access, 2022, 10, 111650- 111664. |
| 26 | LEE C, KIM J. Nonlinear model predictive control of an auto-nomous underwater vehicle for terrain profile tracking[C]//Proc. of the 16th International Conference on Ubiquitous Robots, 2019: 771-774. |
| 27 | SAHU A, KANDATH H, KRISHNA K M. Model predictive control based algorithm for multi-target tracking using a swarm of fixed wing UAVs[C]//Proc. of the IEEE 17th International Conference on Automation Science and Engineering, 2021: 1255-1260. |
| 28 | ILLE M, NAMERIKAWA T. Collision avoidance between multi-UAV systems considering formation control using MPC[C]//Proc. of the IEEE International Conference on Advanced Intelligent Mechatronics, 2017: 651-656. |
| 29 | YUAN S T, ZHAO P C, ZHANG Q Y, et al. Research on model predictive control-based trajectory tracking for unmanned vehicles[C]//Proc. of the 4th International Conference on Control and Robotics Engineering, 2019: 79-86. |
| 30 | CAO G, LAI E M K, ALAM F. Gaussian process model predictive control of unmanned quadrotors[C]//Proc. of the 2nd International Conference on Control, Automation and Robotics, 2016: 200-206. |
| 31 | GUO J X, ZHENG Y K, QU D X, et al. An algorithm of foot end trajectory tracking control for quadruped robot based on model predictive control[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2019: 828-833. |
| 32 | 刘玄冰, 周绍磊, 肖支才, 等. 无人机避障方法研究综述[J]. 兵器装备工程学报, 2022, 43 (5): 40- 47. |
| LIU X B , ZHOU S L , XIAO Z C , et al. A review of research on obstacle avoidance methods for drones[J]. Journal of Ordnance Equipment Engineering, 2022, 43 (5): 40- 47. | |
| 33 | WAN K F , LI B , GAO X G , et al. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments[J]. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1490- 1508. |
| 34 | LI B , LIANG S Y , CHEN D Q , et al. A decision-making method for air combat maneuver based on hybrid deep learning network[J]. Chinese Journal of Electronics, 2022, 31 (1): 107- 115. |
| [1] | 张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893. |
| [2] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [3] | 柳子然, 戴梓健, 岳程斐, 王培基, 曹喜滨. 基于高斯混合过程的空间机器人任务空间预测控制方法[J]. 系统工程与电子技术, 2023, 45(11): 3597-3605. |
| [4] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [5] | 胥彪, 李翔, 李爽, 张金鹏. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43(7): 1943-1953. |
| [6] | 来磊, 吴德伟, 邹鲲, 韩昆, 李海林. 基于多准则交互膜进化算法的UAV三维航迹规划[J]. 系统工程与电子技术, 2021, 43(1): 138-146. |
| [7] | 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198. |
| [8] | 杨宇, 吴达, 高峰, 邓建军. 适用于超低空拦截的复合制导律设计方法[J]. 系统工程与电子技术, 2021, 43(1): 208-215. |
| [9] | 朱梦圆, 吕娜, 陈柯帆, 钟赟, 刘创, 高维廷. 航空集群协同搜索马尔可夫运动目标方法[J]. 系统工程与电子技术, 2019, 41(9): 2041-2047. |
| [10] | 宋敏, 戴静, 孔韬. 基于NMPC的无人机自主防撞控制方法[J]. 系统工程与电子技术, 2019, 41(9): 2092-2099. |
| [11] | 王超, 张胜修, 宋仔标, 杨建业, 吴晓露. 飞行器抗饱和鲁棒自适应非线性模型预测控制[J]. 系统工程与电子技术, 2018, 40(2): 393-400. |
| [12] | 盖俊峰, 赵国荣, 宋超. 基于线性近似和神经网络逼近的模型预测控制[J]. 系统工程与电子技术, 2015, 37(2): 394-399. |
| [13] | 唐贤伦,李洋,李鹏,张毅. 基于多Agent粒子群优化的多步SVR模型预测控制[J]. 系统工程与电子技术, 2014, 36(5): 958-964. |
| [14] | 祁晓明, 魏瑞轩, 沈东, 茹常剑, 周欢. 基于运动目标预测的多无人机分布式协同搜索[J]. 系统工程与电子技术, 2014, 36(12): 2417-2425. |
| [15] | 高晓光, 李青原, 邸若海. 基于DBN威胁评估的MPC无人机三维动态路径规划[J]. 系统工程与电子技术, 2014, 36(11): 2199-2205. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||