Systems Engineering and Electronics ›› 2023, Vol. 46 ›› Issue (1): 300-308.doi: 10.12305/j.issn.1001-506X.2024.01.34
• Guidance, Navigation and Control • Previous Articles
Improvements of slap swarm algorithm based on dynamic model
Hao LEI1,2, Pinzhang ZHAO1, Donghua WANG1, Boyi CHEN2,*
- 1. Jiangsu Institute of Metrology, Nanjing 210049, China
2. College of Astronautic, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
-
Received:2022-10-18Online:2023-12-28Published:2024-01-11 -
Contact:Boyi CHEN
CLC Number:
Cite this article
Hao LEI, Pinzhang ZHAO, Donghua WANG, Boyi CHEN. Improvements of slap swarm algorithm based on dynamic model[J]. Systems Engineering and Electronics, 2023, 46(1): 300-308.
share this article

Fig.1
Algebraic interpretation of the following law based on dynamic interpreter"
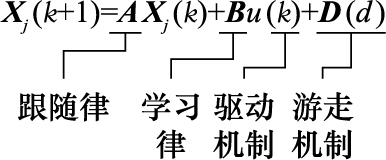

Fig.2
Geometric interpretation of heterogeneous following law"


Fig.3
Flowchart of MHSSA"

Table 1
Comparison of average rank for statistical characteristics of algorithms"
| 统计学特征 | 算法 | |||||||
| SSA | HSSA | MSSA | MSNSSA | OOSSA | PSO | GWO | MHSSA | |
| Median | 5.37(6) | 4.77(5) | 2.77(2) | 7.33(8) | 4.17(4) | 5.97(7) | 3.83(3) | 1.80(1) |
| Variance | 4.40(4) | 4.23(3) | 4.93(7) | 4.43(5) | 3.93(2) | 5.37(8) | 4.80(6) | 3.90(1) |
| Minimum | 5.13(6) | 4.63(5) | 2.70(2) | 7.23(8) | 4.03(3) | 5.40(7) | 4.33(4) | 2.53(1) |
| Maximum | 5.00(5) | 4.47(4) | 2.97(2) | 6.77(8) | 3.27(3) | 6.47(7) | 5.37(6) | 1.70(1) |
Table 2
Significance testing of algorithms"
| 测试函数序号 | 算法 | ||||||
| SSA | HSSA | MSSA | MSNSSA | OOSSA | PSO | GWO | |
| 1 | S+ | S+ | NS- | S+ | S+ | S+ | S+ |
| 2 | S+ | S+ | NS+ | S+ | S+ | NS+ | S+ |
| 3 | S+ | S+ | S- | S+ | S+ | S+ | S+ |
| 4 | S+ | S+ | NS- | S+ | S+ | S+ | S+ |
| 5 | NS+ | S+ | NS+ | S+ | NS+ | S+ | S+ |
| 6 | S+ | S+ | S+ | S+ | S+ | S- | S+ |
| 7 | S+ | S+ | S- | S+ | S+ | NS+ | S+ |
| 8 | NS+ | S+ | S+ | S+ | S- | S- | NS- |
| 9 | S+ | S+ | S+ | S+ | S- | S+ | S+ |
| 10 | S+ | S+ | S+ | S+ | S+ | S- | NS+ |
| 11 | S+ | NS+ | NS+ | S+ | NS+ | S+ | NS+ |
| 12 | S+ | S+ | S+ | S+ | S+ | S+ | S+ |
| 13 | S+ | S+ | S+ | S+ | S- | S+ | NS- |
| 14 | S+ | S+ | NS+ | S+ | NS+ | S+ | S+ |
| 15 | S+ | S+ | S+ | S+ | S+ | S+ | S+ |
| 16 | S+ | S+ | NS+ | S+ | S+ | S+ | S+ |
| 17 | S+ | S+ | NS+ | S+ | S+ | S+ | NS- |
| 18 | S+ | S+ | S+ | S+ | S- | S+ | S+ |
| 19 | S+ | S+ | NS+ | S+ | S+ | S+ | S+ |
| 20 | S+ | S+ | S+ | S+ | S- | S+ | S+ |
| 21 | S+ | S+ | NS- | S+ | S+ | S+ | NS+ |
| 22 | S+ | S+ | NS+ | S+ | NS+ | S+ | S- |
| 23 | S+ | S+ | NS- | S+ | S+ | S+ | S+ |
| 24 | S+ | S+ | S+ | S+ | S+ | S+ | S+ |
| 25 | S+ | S+ | S+ | S+ | S- | S+ | S+ |
| 26 | S+ | S+ | NS+ | NS+ | S+ | S+ | NS- |
| 27 | S+ | S+ | NS+ | S+ | S+ | S+ | NS- |
| 28 | S+ | S+ | S+ | S+ | S+ | S+ | NS+ |
| 29 | S+ | S+ | NS- | S+ | S+ | NS+ | NS- |
| 30 | S+ | S+ | NS- | S+ | S+ | S+ | S+ |

Fig.4
Significance comparison between MHSSA and other algorithms"

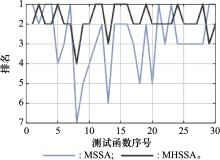
Fig.5
Median rank of MSSA and MHSSA for CEC14 testsuite"


Fig.6
Median rank of MSSA and OOSSA for CEC14 testsuite"


Fig.7
Median rank of MSSA and PSO for CEC14 testsuite"


Fig.8
Median rank of MSSA and GWO for CEC14 testsuite"


Fig.9
Optimization results comparison of algorithms for multimodal test functions"


Fig.10
Optimization results comparison of algorithms for combined test functions"


Fig.11
Median convergence trajectory comparison of optimal value for multimodal test functions F12"


Fig.12
Median convergence trajectory comparison of optimal value for combined test functions F24"

| 1 |
CHEN H , HEIDARI A A , CHEN H , et al. Multi-population differential evolution-assisted Harris hawks optimization: framework and case studies[J]. Future Generation Computer Systems, 2020, 111, 175- 198.
doi: 10.1016/j.future.2020.04.008 |
| 2 |
RODRÍGUEZ-ESPARZA E , ZANELLA-CALZADA L A , OLIVA D , et al. An efficient Harris hawks-inspired image segmentation method[J]. Expert Systems with Applications, 2020, 155, 113428.
doi: 10.1016/j.eswa.2020.113428 |
| 3 |
SONG S , WANG P , HEIDARI A A , et al. Dimension decided Harris hawks optimization with Gaussian mutation: balance analysis and diversity patterns[J]. Knowledge-Based Systems, 2021, 215, 106425.
doi: 10.1016/j.knosys.2020.106425 |
| 4 | THAHER T , HEIDARI A A , MAFARJA M , et al. Evolutionary machine learning techniques. Algorithms for intelligent systems: binary harris hawks optimizer for high-dimensional, low sample size feature selection[M]. Singapore: Springer, 2020. |
| 5 |
WEI Y , LV H , CHEN M , et al. Predicting entrepreneurial intention of students: an extreme learning machine with Gaussian barebone Harris hawks optimizer[J]. IEEE Access, 2020, 8, 76841- 76855.
doi: 10.1109/ACCESS.2020.2982796 |
| 6 |
ZHANG Y , LIU R , WANG X , et al. Boosted binary Harris hawks optimizer and feature selection[J]. Engineering with Computers, 2021, 37 (4): 3741- 3770.
doi: 10.1007/s00366-020-01028-5 |
| 7 | 汤安迪, 韩统, 徐登武, 等. 使用高斯分布估计策略的改进樽海鞘群算法[J]. 系统工程与电子技术, 2022, 44 (7): 2229- 2240. |
| TANG A D , HAN T , XU D W , et al. An improved salp swarm algorithm using Gaussian distribution estimation strategy[J]. Systems Engineering and Electronics, 2022, 44 (2): 2229- 2240. | |
| 8 |
MIRJALILI S , MOHAMMAD S , LEWIS A . Grey Wolf optimizer[J]. Advances in Engineering Software, 2014, 69, 46- 61.
doi: 10.1016/j.advengsoft.2013.12.007 |
| 9 |
CHANTAR H , MAFARJA M , ALSAWALQAH H , et al. Feature selection using binary grey wolf optimizer with elite-based crossover for Arabic text classification[J]. Neural Computing and Applications, 2020, 32 (16): 12201- 12220.
doi: 10.1007/s00521-019-04368-6 |
| 10 |
HEIDARI A A , PAHLAVANI P . An efficient modified grey wolf optimizer with Lévy flight for optimization tasks[J]. Applied Soft Computing Journal, 2017, 60, 115- 134.
doi: 10.1016/j.asoc.2017.06.044 |
| 11 |
HEIDARI A A , ALI ABBASPOUR R , CHEN H . Efficient boosted grey wolf optimizers for global search and kernel extreme learning machine training[J]. Applied Soft Computing Journal, 2019, 81, 105521.
doi: 10.1016/j.asoc.2019.105521 |
| 12 |
KARABOGA D , AKAY B . A comparative study of artificial bee colony algorithm[J]. Applied Mathematics and Computation, 2009, 214 (1): 108- 132.
doi: 10.1016/j.amc.2009.03.090 |
| 13 |
YAVUZ G , DURMUŞ B , AYDIN D . Artificial bee colony algorithm with distant savants for constrained optimization[J]. Applied Soft Computing, 2022, 116, 108343.
doi: 10.1016/j.asoc.2021.108343 |
| 14 |
THIRUGNANASAMBANDAM K , RAJESWARI M , BHATTACHARYYA D , et al. Directed artificial bee colony algorithm with revamped search strategy to solve global numerical optimization problems[J]. Automated Software Engineering, 2022, 29, 13.
doi: 10.1007/s10515-021-00306-w |
| 15 |
MIRJALILI S , LEWIS A . The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95, 51- 67.
doi: 10.1016/j.advengsoft.2016.01.008 |
| 16 |
CAO Y , WANG Q , CHENG W , et al. Risk-constrained optimal operation of fuel cell/photovoltaic/battery/grid hybrid energy system using downside risk constraints method[J]. International Journal of Hydrogen Energy, 2020, 45 (27): 14108- 14118.
doi: 10.1016/j.ijhydene.2020.03.090 |
| 17 |
CHEN H , YANG C , HEIDARI A A , et al. An efficient double adaptive random spare reinforced whale optimization algorithm[J]. Expert Systems with Applications, 2020, 154, 113018.
doi: 10.1016/j.eswa.2019.113018 |
| 18 |
HEIDARI A A , ALJARAH I , FARIS H , et al. An enhanced associative learning-based exploratory whale optimizer for global optimization[J]. Neural Computing and Applications, 2020, 32 (9): 5185- 5211.
doi: 10.1007/s00521-019-04015-0 |
| 19 |
LUO J , CHEN H , HEIDARI A A , et al. Multi-strategy boosted mutative whale-inspired optimization approaches[J]. Applied Mathematical Modelling, 2019, 73, 109- 123.
doi: 10.1016/j.apm.2019.03.046 |
| 20 |
MAFARJA M , HEIDARI A A , HABIB M , et al. Augmented whale feature selection for IoT attacks: structure, analysis and applications[J]. Future Generation Computer Systems, 2020, 112, 18- 40.
doi: 10.1016/j.future.2020.05.020 |
| 21 | TU J , CHEN H , LIU J , et al. Evolutionary biogeography-based whale optimization methods with communication structure: towards measuring the balance[J]. Knowledge-Based Systems, 2020, 212, 106642. |
| 22 | WANG M , CHEN H . Chaotic multi-swarm whale optimizer boosted support vector machine for medical diagnosis[J]. Applied Soft Computing Journal, 2020, 88, 1- 20. |
| 23 |
WOLPERT D H , NNA D , ROAD H , et al. No free lunch theorems for optimization[J]. IEEE Trans. on Evolutionary Computation, 1997, 1 (1): 67- 82.
doi: 10.1109/4235.585893 |
| 24 |
MIRJALILI S , GANDOMI A H , MIRJALILI S Z , et al. Salp swarm algorithm: a bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software, 2017, 114, 163- 191.
doi: 10.1016/j.advengsoft.2017.07.002 |
| 25 |
QAIS M H , HASANIEN H M , ALGHUWAINEM S . Enhanced salp swarm algorithm: application to variable speed wind generators[J]. Engineering Applications of Artificial Intelligence, 2019, 80, 82- 96.
doi: 10.1016/j.engappai.2019.01.011 |
| 26 | 王宗山, 丁洪伟, 王杰, 等. 基于正交设计的折射反向学习樽海鞘群算法[J]. 哈尔滨工业大学学报, 2022, 54 (11): 122- 136. |
| WANG Z S , DING H W , WANG J , et al. Salp swarm algorithm based on orthogonal refracted opposition-based learning[J]. Journal of Harbin Institute of Technology, 2022, 54 (11): 122- 136. | |
| 27 |
黄小根, 钟尚勤. 一种多策略驱动的改进樽海鞘群算法[J]. 计算机仿真, 2022, 39 (1): 308- 311.
doi: 10.3969/j.issn.1006-9348.2022.01.065 |
|
HUANG X G , ZHONG S Q . A multi-strategy-driven salp swarm algorithm for global optimization[J]. Computer Simulation, 2022, 39 (1): 308- 311.
doi: 10.3969/j.issn.1006-9348.2022.01.065 |
|
| 28 | 陈忠云, 张达敏, 辛梓芸. 多子群的共生非均匀高斯变异樽海鞘群算法[J]. 自动化学报, 2022, 48 (5): 1307- 1317. |
| CHEN Z Y , ZHANG D M , XIN Z Y . Multi-subpopulation based symbiosis and non-uniform gaussian mutation salp swarm algorithm[J]. Acta Automatica Sinica, 2022, 48 (5): 1307- 1317. | |
| 29 | 陈忠云, 张达敏, 辛梓芸. 正弦余弦算法的樽海鞘群算法[J]. 计算机应用与软件, 2020, 37 (9): 209- 214. |
| CHEN Z Y , ZHANG D M , XIN Z Y . Salp swarm algorithm using sine cosine algorithm[J]. Computer Applications and Software, 2020, 37 (9): 209- 214. | |
| 30 | 杨博, 钟林恩, 朱德娜, 等. 部分遮蔽下改进樽海鞘群算法的光伏系统最大功率跟踪[J]. 控制理论与应用, 2019, 36 (3): 339- 352. |
| YANG B , ZHONG L E , ZHU D N , et al. Modified salp swarm algorithm based maximum power point tracking of power-voltage system under partial shading condition[J]. Control Theory and Applications, 2019, 36 (3): 339- 352. | |
| 31 |
OZBAY F A , ALATAS B . Adaptive salp swarm optimization algorithms with inertia weights for novel fake news detection model in online social media[J]. Multimedia Tools and Applications, 2021, 80, 34333- 34357.
doi: 10.1007/s11042-021-11006-8 |
| 32 |
BRAIK M , SHETA A , TURABIEH H , et al. A novel lifetime scheme for enhancing the convergence performance of salp swarm algorithm[J]. Soft Computing, 2021, 25 (1): 181- 206.
doi: 10.1007/s00500-020-05130-0 |
| 33 | 邢致恺, 贾鹤鸣, 宋文龙. 基于莱维飞行樽海鞘群优化算法的多阈值图像分割[J]. 自动化学报, 2021, 47 (2): 363- 377. |
| XING Z K , JIA H M , SONG W L . Levyflight trajectory-based salp swarm algorithm for multilevel thresholding image segmentation[J]. Acta Automatica Sinica, 2021, 47 (2): 363- 377. | |
| 34 | NAUTIYAL B , PRAKASH R , VIMAL V , et al. Improved salp swarm algorithm with mutation schemes for solving global optimization and engineering problems[J]. Engineering with Computers, 2021, 38, 3927- 3949. |
| 35 | 周密, 王潇棠, 闫河, 等. 一种混沌映射动态惯性权重的樽海鞘群算法[J]. 小型微型计算机系统, 2023, 44 (2): 131- 318. |
| ZHOU M , WANG X T , YAN H , et al. Salp swarm algorithm based on chaotic map and dynamic inertia weight[J]. Journal of Chinese micro Computer Systems, 2023, 44 (2): 131- 318. |
| [1] | Zhenya YANG, Zhi ZHANG, Xiaobing SHANG, Zejun CAO, Zhexuan SUN. Vessel trajectory prediction based on improved multi-output support vector [J]. Systems Engineering and Electronics, 2023, 46(1): 173-181. |
| [2] | Andi TANG, Tong HAN, Dengwu XU, Huan ZHOU, lei XIE. An improved salp swarm algorithm using Gaussian distribution estimation strategy [J]. Systems Engineering and Electronics, 2022, 44(7): 2229-2240. |
| [3] | XUE Junjie, WANG Ying, MENG Xiangfei, XIAO Jiyang. Binary opposite backward learning fireworks algorithm for multidimensional knapsack problem [J]. Systems Engineering and Electronics, 2017, 39(2): 451-458. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||