Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (8): 2521-2532.doi: 10.12305/j.issn.1001-506X.2023.08.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Field calibration method of full state variables for strapdown inertial navigation system
Rui ZHANG, Yueyang BEN, Liqiang LIU, Kun WANG, Liang HOU, Tian QIU
- College of Intelligent Systems Science and Engineering, Harbin Engineering University, Harbin 150001, China
-
Received:2022-06-21Online:2023-07-25Published:2023-08-03 -
Contact:Yueyang BEN
CLC Number:
Cite this article
Rui ZHANG, Yueyang BEN, Liqiang LIU, Kun WANG, Liang HOU, Tian QIU. Field calibration method of full state variables for strapdown inertial navigation system[J]. Systems Engineering and Electronics, 2023, 45(8): 2521-2532.
share this article
Table 1
Observability degree of each state quantity rotated three times about the x axis"
| 状态量 | 转动一次 | 转动两次 | 转动三次 |
| εx/(°/h) | 1.671 | 284.711 | 1.650×103 |
| εy/(°/h) | 0.091 | 13.639 | 304.403 |
| εz/(°/h) | 0.063 | 179.117 | 1.734×103 |
| Δx/μg | 1.140×10-5 | 0.006 | 0.529 |
| Δy/μg | 0.006 | 0.177 | 0.310 |
| Δz/μg | 0.008 | 0.032 | 0.539 |
| Kgx/ppm | 0.597 | 8.934 | 17.838 |
| Egyx/(″) | 0.002 | 1.250 | 14.276 |
| Egzx/(″) | 0.002 | 2.152 | 28.397 |
| Egxy/(″) | 1.094×10-4 | 82.451 | 156.938 |
| Kgy/ppm | 1.027×10-6 | 0.963 | 1.147 |
| Egzy/(″) | 2.758×10-7 | 24.635 | 146.249 |
| Egxz/(″) | 4.573×10-4 | 0.019 | 92.586 |
| Egyz/(″) | 2.825×10-7 | 5.487×10-4 | 111.916 |
| Kgz/ppm | 1.024×10-6 | 0.011 | 60.843 |
| Kax/ppm | 5.648×10-8 | 1.691×10-5 | 3.804 |
| Eayx/(″) | 2.441×10-6 | 0.027 | 3.002 |
| Eazx/(″) | 3.232×10-6 | 1.072×10-4 | 3.146 |
| Eaxy/(″) | 0.002 | 0.356 | 5.071 |
| Kay/ppm | 0.111 | 2.440 | 3.987 |
| Eazy/(″) | 2.455×10-7 | 1.562 | 5.519 |
| Eaxz/(″) | 0.001 | 0.359 | 5.125 |
| Eayz/(″) | 2.455×10-7 | 1.378 | 3.037 |
| Kaz/ppm | 0.085 | 2.510 | 3.636 |
| Ka2x/(μg/g2) | 1.605×10-11 | 4.146×10-6 | 35.487 |
| Ka2y/(μg/g2) | 1.654 | 17.826 | 34.681 |
| Ka2z/(μg/g2) | 0.962 | 17.426 | 30.055 |
Table 2
Observability degree of three rotation order error parameters"
| 状态量 | xyz | xzy | yxz |
| εx/(°/h) | 1.650×103 | 1.412×103 | 293.278 |
| εy/(°/h) | 304.403 | 1.361×103 | 1.649×103 |
| εz/(°/h) | 1.734×103 | 1.997×103 | 1.724×103 |
| Δx/μg | 0.529 | 0.501 | 0.312 |
| Δy/μg | 0.310 | 0.484 | 0.590 |
| Δz/μg | 0.539 | 0.504 | 0.595 |
| Kgx/ppm | 17.838 | 19.379 | 1.377 |
| Egyx/(″) | 14.276 | 14.142 | 160.514 |
| Egzx/(″) | 28.397 | 29.801 | 163.561 |
| Egxy/(″) | 156.938 | 105.465 | 15.174 |
| Kgy/ppm | 1.147 | 98.902 | 17.920 |
| Egzy/(″) | 146.249 | 99.910 | 30.960 |
| Egxz/(″) | 92.586 | 55.976 | 114.867 |
| Egyz/(″) | 111.916 | 69.792 | 99.790 |
| Kgz/ppm | 60.843 | 57.637 | 61.039 |
| Kax/ppm | 3.804 | 4.416 | 3.996 |
| Eayx/(″) | 3.002 | 4.944 | 5.594 |
| Eazx/(″) | 3.146 | 5.157 | 6.035 |
| Eaxy/(″) | 5.071 | 4.772 | 3.014 |
| Kay/ppm | 3.987 | 4.647 | 3.867 |
| Eazy/(″) | 5.519 | 5.379 | 3.152 |
| Eaxz/(″) | 5.125 | 4.727 | 3.066 |
| Eayz/(″) | 3.037 | 4.544 | 5.586 |
| Kaz/ppm | 3.636 | 4.667 | 3.584 |
| Ka2x/(μg/g2) | 35.487 | 63.204 | 35.225 |
| Ka2y/(μg/g2) | 34.681 | 54.684 | 35.151 |
| Ka2z/(μg/g2) | 30.055 | 55.214 | 29.967 |
Table 3
Observability degree of the other three rotation order error parameters"
| 状态量 | yzx | zxy | zyx |
| εx/(°/h) | 1.503×103 | 1.617×103 | 1.209×103 |
| εy/(°/h) | 1.433×103 | 852.538 | 3.894×103 |
| εz/(°/h) | 2.101×103 | 926.849 | 680.545 |
| Δx/μg | 0.468 | 0.047 | 0.500 |
| Δy/μg | 0.466 | 0.483 | 0.039 |
| Δz/μg | 0.427 | 0.441 | 0.421 |
| Kgx/ppm | 112.513 | 16.739 | 1.146 |
| Egyx/(″) | 111.234 | 10.034 | 195.471 |
| Egzx/(″) | 98.915 | 13.540 | 83.377 |
| Egxy/(″) | 14.389 | 194.768 | 25.275 |
| Kgy/ppm | 23.022 | 1.676 | 16.571 |
| Egzy/(″) | 29.980 | 118.956 | 29.710 |
| Egxz/(″) | 87.479 | 41.815 | 22.316 |
| Egyz/(″) | 69.542 | 25.359 | 36.595 |
| Kgz/ppm | 45.749 | 0.054 | 0.041 |
| Kax/ppm | 4.735 | 8.443×10-5 | 3.658 |
| Eayx/(″) | 4.963 | 0.030 | 1.129 |
| Eazx/(″) | 6.114 | 0.018 | 4.468 |
| Eaxy/(″) | 4.971 | 1.023 | 0.058 |
| Kay/ppm | 4.820 | 3.690 | 4.910×10-5 |
| Eazy/(″) | 5.687 | 4.380 | 0.043 |
| Eaxz/(″) | 5.330 | 1.021 | 4.859 |
| Eayz/(″) | 4.961 | 4.795 | 2.391 |
| Kaz/ppm | 245.849 | 3.466 | 3.455 |
| Ka2x/(μg/g2) | 36.784 | 1.086×10-5 | 31.206 |
| Ka2y/(μg/g2) | 43.079 | 30.851 | 3.621×10-5 |
| Ka2z/(μg/g2) | 41.161 | 27.884 | 27.278 |
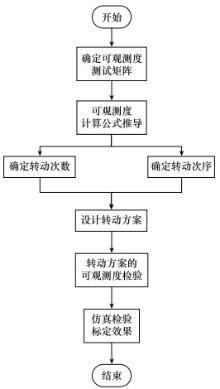
Fig.1
Design flowchart of transposition scheme"
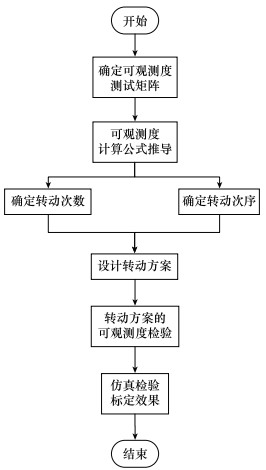
Table 4
The new designed calibration transposition scheme"
| 转动次序 | 三轴指向 | 转动90° |
| 1 | 东北天 | +ox |
| 2 | 东地北 | +ox |
| 3 | 东南地 | +ox |
| 4 | 东天南 | -ox |
| 5 | 东南地 | -ox |
| 6 | 东地北 | -ox |
| 7 | 东北天 | +oy |
| 8 | 天北西 | +oz |
| 9 | 南天西 | +oz |
| 10 | 地南西 | +oz |
| 11 | 北地西 | -oz |
| 12 | 地南西 | -oz |
| 13 | 南天西 | -oz |
| 14 | 天北西 | +oy |
| 15 | 西北地 | +ox |
| 16 | 西天北 | +ox |
| 17 | 西南天 | +ox |
| 18 | 西地南 | -ox |
| 19 | 西南天 | -ox |
| 20 | 西天北 | -ox |
| 21 | 西北地 | -oy |
| 22 | 天北西 | -oy |
| 23 | 东北天 | 停止 |
Table 5
Calibration true value setting"
| 状态量 | 真实值 |
| εx/(°/h) | 0.25 |
| εy/(°/h) | 0.25 |
| εz/(°/h) | 0.25 |
| Δx/μg | 25 |
| Δy/μg | 25 |
| Δz/μg | 25 |
| Kgx/ppm | 20 |
| Egyx/(″) | -30 |
| Egzx/(″) | -50 |
| Egxy/(″) | -10 |
| Kgy/ppm | 20 |
| Egzy/(″) | -60 |
| Egxz/(″) | -20 |
| Egyz/(″) | -40 |
| Kgz/ppm | 20 |
| Kax/ppm | 20 |
| Eayx/(″) | -10 |
| Eazx/(″) | -20 |
| Eaxy/(″) | 0 |
| Kay/ppm | 20 |
| Eazy/(″) | -30 |
| Eaxz/(″) | 0 |
| Eayz/(″) | 0 |
| Kaz/ppm | 20 |
| Ka2x/(μg/g2) | 25 |
| Ka2y/(μg/g2) | 25 |
| Ka2z/(μg/g2) | 25 |
Table 6
Calibration transposition scheme"
| 转动次序 | 三轴指向 | 转动90° |
| 1 | 东北天 | +oy |
| 2 | 天北西 | +oy |
| 3 | 西北地 | +oy |
| 4 | 地北东 | -oy |
| 5 | 西北地 | -oy |
| 6 | 天北西 | -oy |
| 7 | 东北天 | +oz |
| 8 | 南东天 | +ox |
| 9 | 南地东 | +ox |
| 10 | 南西地 | +ox |
| 11 | 南天西 | -ox |
| 12 | 南西地 | -ox |
| 13 | 南地东 | -ox |
| 14 | 南东天 | +oz |
| 15 | 西南天 | +oz |
| 16 | 北西天 | -oz |
| 17 | 西南天 | -oz |
| 18 | 南东天 | -oz |
| 19 | 东北天 | 停止 |
Table 7
Calculation results of observability degree of the traditional transposition scheme"
| 状态量 | 可观测度 |
| εx/(°/h) | 6.021×105 |
| εy/(°/h) | 4.354×105 |
| εz/(°/h) | 1.056×105 |
| Δx/μg | 495.414 |
| Δy/μg | 270.582 |
| Δz/μg | 228.641 |
| Kgx/ppm | 1.767×104 |
| Egyx/(″) | 4.546×104 |
| Egzx/(″) | 3.247×104 |
| Egxy/(″) | 1.518×104 |
| Kgy/ppm | 5.724×103 |
| Egzy/(″) | 9.801×103 |
| Egxz/(″) | 7.864×104 |
| Egyz/(″) | 9.436×104 |
| Kgz/ppm | 1.314×103 |
| Kax/ppm | 2.980×103 |
| Eayx/(″) | 1.334×103 |
| Eazx/(″) | 1.473×103 |
| Eaxy/(″) | 369.099 |
| Kay/ppm | 2.882×103 |
| Eazy/(″) | 1.423×103 |
| Eaxz/(″) | 1.417×103 |
| Eayz/(″) | 2.121×103 |
| Kaz/ppm | 4.195×103 |
| Ka2x/(μg/g2) | 1.858×104 |
| Ka2y/(μg/g2) | 1.770×104 |
| Ka2z/(μg/g2) | 2.288×104 |
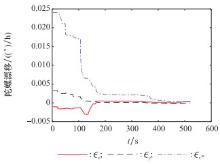
Fig.2
Gyro drift calibration"

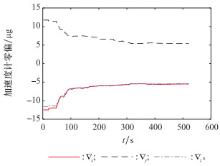
Fig.3
Accelerometer bias calibration"

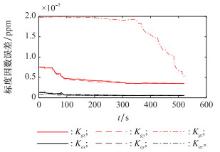
Fig.4
Scale factor error calibration"
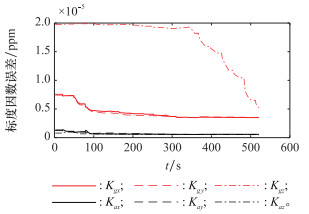
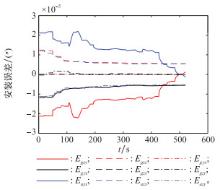
Fig.5
Installation error calibration"
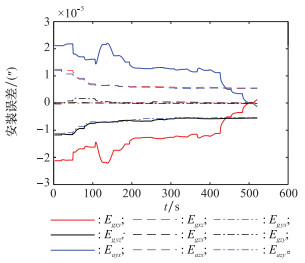
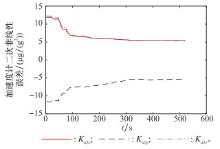
Fig.6
Quadratic nonlinear error calibration"

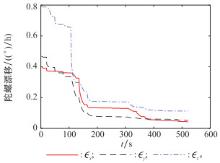
Fig.7
Gyro drift covariance"


Fig.8
Accelerometer bias covariance"

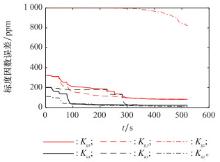
Fig.9
Scale factor error covariance"

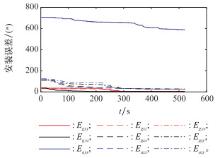
Fig.10
Installation error covariance"
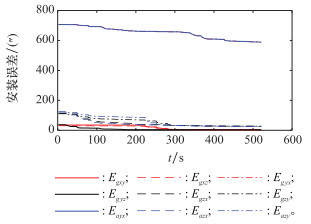
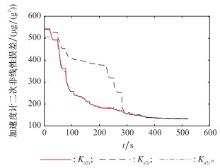
Fig.11
Quadratic nonlinear error covariance"
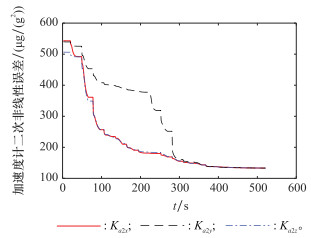
Table 8
Calculation results of observability degree with transposition"
| 状态量 | 可观测度 |
| εx/(°/h) | 5.559×105 |
| εy/(°/h) | 9.992×105 |
| εz/(°/h) | 1.015×106 |
| Δx/μg | 1.186×103 |
| Δy/μg | 452.664 |
| Δz/μg | 717.058 |
| Kgx/ppm | 1.297×105 |
| Egyx/(″) | 9.366×104 |
| Egzx/(″) | 1.029×105 |
| Egxy/(″) | 5.535×104 |
| Kgy/ppm | 8.352×104 |
| Egzy/(″) | 7.521×104 |
| Egxz/(″) | 5.551×104 |
| Egyz/(″) | 5.398×104 |
| Kgz/ppm | 7.991×104 |
| Kax/ppm | 4.977×103 |
| Eayx/(″) | 1.387×103 |
| Eazx/(″) | 2.478×103 |
| Eaxy/(″) | 2.794×103 |
| Kay/ppm | 4.697×103 |
| Eazy/(″) | 1.885×103 |
| Eaxz/(″) | 2.592×103 |
| Eayz/(″) | 1.642×103 |
| Kaz/ppm | 4.596×103 |
| Ka2x/(μg/g2) | 2.455×104 |
| Ka2y/(μg/g2) | 3.500×104 |
| Ka2z/(μg/g2) | 3.314×104 |
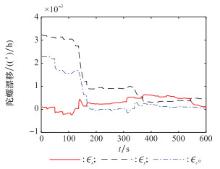
Fig.12
Gyro drift calibration"
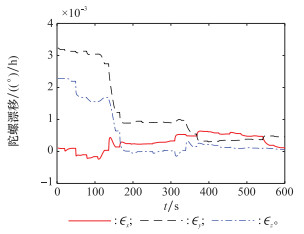
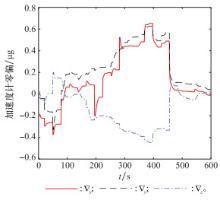
Fig.13
Accelerometer bias calibration"

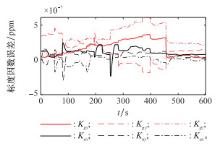
Fig.14
Scale factor error calibration"
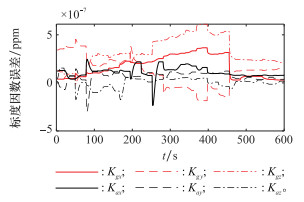
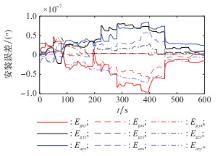
Fig.15
Installation error calibration"

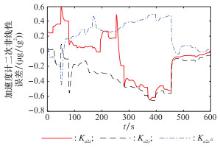
Fig.16
Quadratic nonlinear error calibration"
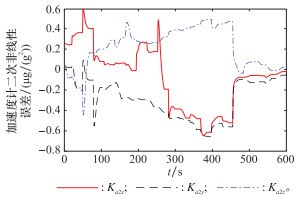
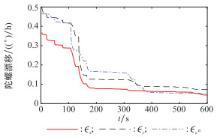
Fig.17
Gyro drift covariance"

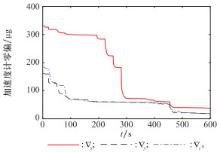
Fig.18
Accelerometer bias covariance"

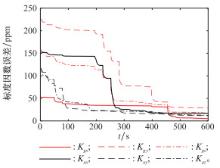
Fig.19
Scale factor error covariance"
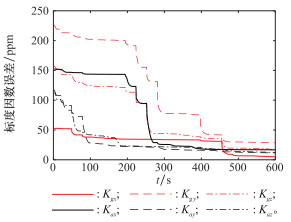
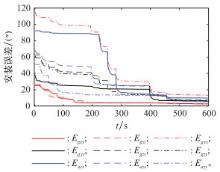
Fig.20
Installation error covariance"

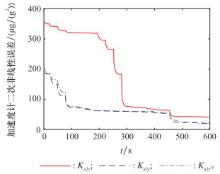
Fig.21
Quadratic nonlinear error covariance"

| 1 | XU Y , ZHU X H , SU Y . A novel network calibration method for inertial measurement units[J]. Proceedings of the Institution of Mechanical Engineers Part G-Journal of Aerospace Engineering, 2014, 229 (7): 16- 18. |
| 2 |
杨小康, 严恭敏, 李四海. 一种锚泊条件下捷联惯导系统级标定方法[J]. 中国惯性技术学报, 2020, 28 (1): 1- 7.
doi: 10.13695/j.cnki.12-1222/o3.2020.01.001 |
|
YANG X K , YAN G M , LI S H . A system-lever calibration method of SIMU under the anchoring condition[J]. Journal of Chinese Inertial Technology, 2020, 28 (1): 1- 7.
doi: 10.13695/j.cnki.12-1222/o3.2020.01.001 |
|
| 3 | 刘鹏, 任一峰, 张亚, 等. 惯性导航系统可观测性分析与可观测状态确定的图方法[J]. 控制理论与应用, 2020, 37 (1): 98- 106. |
| LIU P , REN Y F , ZHANG Y , et al. Graphic method for observability and observable states analysis of inertial navigation systems[J]. Control Theory & Applications, 2020, 37 (1): 98- 106. | |
| 4 | 周广涛, 邵剑波, 韩少卫, 等. SVD可观测度分析方法的改进及组合导航系统中的应用[J]. 哈尔滨工业大学学报, 2020, 52 (4): 52- 57. |
| ZHOU G T , SHAO J B , HAN S W , et al. Improvement of observable degree analysis method based on SVD and application in integrated navigation[J]. Journal of Harbin Institute of Technology, 2020, 52 (4): 52- 57. | |
| 5 |
LIANG Y , HAN L , DONG X W , et al. An quantitative method for observability analysis and its application in SINS calibration[J]. Aerospace Science and Technology, 2020, 103, 105881.
doi: 10.1016/j.ast.2020.105881 |
| 6 | MIAO J S, WANG C, REN Y, et al. Fast and high-accuracy systematic calibration of inertial devices based on IMU off-axis transposition[C]//Proc. of the Global Intelligence Industry Conference, 2018. |
| 7 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22, 112.
doi: 10.1007/s10291-018-0773-3 |
| 8 |
XU B , WANG L Z , DUAN T H . A novel hybrid calibration method for FOG-based IMU[J]. Measurement, 2019, 147, 106900.
doi: 10.1016/j.measurement.2019.106900 |
| 9 | 王大轶, 李嘉兴, 董天舒, 等. 基于航天器可观测性理论的多源融合自主导航技术[J]. 前瞻科技, 2022, 1 (1): 146- 158. |
| WANG D Y , LI J X , DONG T S , et al. Multi-source fusion autonomous navigation technologies based on spacecraft observability theory[J]. Science and Technology Foresight, 2022, 1 (1): 146- 158. | |
| 10 |
SUN W , WANG D X , XU L W , et al. MEMS-based rotary strapdown inertial navigation system[J]. Measurement, 2013, 46 (8): 2585- 2596.
doi: 10.1016/j.measurement.2013.04.035 |
| 11 | CHANG J C, DUAN D Z, YU F, et al. A swing online calibration method of ship-based FOG-IMU[C]//Proc. of the Forum on Cooperative Positioning and Service, 2017: 33-38. |
| 12 | WANG Z H , CHEN X H . Adaptive optimization online IMU self-calibration method for visual-inertial navigation systems[J]. Measurement, 2021, 180 (9): 109478. |
| 13 | LI D , XU J N , ZHU B , et al. A calibration method of DVL in integrated navigation system based on particle swarm optimization[J]. Measurement, 2022, 187 (1): 1- 12. |
| 14 |
WEN Z Y , YANG G L , CAI Q Z . An improved calibration method for the IMU biases utilizing KF-based AdaGrad algorithm[J]. Sensors, 2021, 21 (15): 5055.
doi: 10.3390/s21155055 |
| 15 |
GAO W , ZHANG Y , WANG J G . Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems[J]. Sensors, 2015, 15 (2): 3154- 3171.
doi: 10.3390/s150203154 |
| 16 |
LI K , CHEN Y P , WANG L C . Online self-calibration research of single-axis rotational inertial navigation system[J]. Measurement, 2018, 129, 633- 641.
doi: 10.1016/j.measurement.2018.07.065 |
| 17 | SHUANG D , WEI S . Improving observability of an inertial system by rotary motions of an IMU[J]. Sensors, 2017, 17 (4): 69- 78. |
| 18 | BAI S Y , LAI J Z , LYU P , et al. A system-level self-calibration method for installation errors in a dual-axis rotational inertial navigation system[J]. Sensors, 2019, 19 (18): 40- 45. |
| 19 | GAO K , REN S Q , CHEN X J , et al. An optimization-based initial alignment and calibration algorithm of land-vehicle SINS in-motion[J]. Sensors, 2018, 18 (19): 20- 28. |
| 20 | HU Z T , CHEN T X , GE Q B , et al. Observable degree ana-lysis for multi-sensor fusion system[J]. Sensors, 2018, 18 (19): 41- 47. |
| 21 | FELIPE S , ELDER H , WALDEMAR L F . On the error state selection for stationary SINS alignment and calibration Kalman filters-Part Ⅱ: observability and estimability analysis[J]. Sensors, 2017, 17 (3): 43- 49. |
| 22 | ITZIK K , ROEE D , PASSARO V . Observability analysis of DVL/PS aided INS for a maneuvering AUV[J]. Sensors, 2015, 15 (10): 18- 37. |
| 23 | LYU D , WANG J , HE Z , et al. Landmark-based inertial navigation system for autonomous navigation of missile platform[J]. Sensors, 2020, 20 (11): 70- 83. |
| 24 | FENG G H , WU W Q , WANG J L . Observability analysis of a matrix Kalman filter-based navigation system using visual/inertial/magnetic sensors[J]. Sensors, 2012, 12 (7): 77- 94. |
| 25 | CHEN W H , YANG Z , GU S S , et al. Adaptive transfer alignment method based on the observability analysis for airborne pod strapdown inertial navigation system[J]. Scientific Reports, 2022, 12 (1): 1- 14. |
| 26 | KOLLER T L , FRESS U . State observability through prior knowledge: analysis of the height map prior for track cycling[J]. Sensors, 2020, 20 (9): 24- 38. |
| 27 | YANG Y Q , ZHANG C X , LU J Z . Local observability analysis of star sensor installation errors in a SINS/CNS integration system for near-earth flight vehicles[J]. Sensors, 2017, 17 (1): 1- 13. |
| 28 | FAN C , HU X P , HE X F , et al. Observability analysis of a MEMS INS/GPS integration system with gyroscope G-sensitivity errors[J]. Sensors, 2014, 14 (9): 6- 16. |
| 29 | JIANG W P , WANG L , NIU X J , et al. High-precision image aided inertial navigation with known features: observability analysis and performance evaluation[J]. Sensors, 2014, 14 (10): 371- 401. |
| 30 | BAI S Y , LAI J Z , LYU P , et al. A system-level self-calibration method for installation errors in a dual-axis rotational inertial navigation system[J]. Sensors, 2019, 19 (18): 4005. |
| 31 | ADRIANO F , FELIPE O S , ETTORE A B . Influence of integration schemes and maneuvers on the initial alignment and calibration of AUVS: observability and degree of observability analysis[J]. Sensors, 2022, 22 (9): 3287. |
| [1] | WANG Kunming, XIE Jian, ZHOU Zhaofa. Calibration method of single-axial rotation SINS axial nonorthogonal error under outfield conditions [J]. Systems Engineering and Electronics, 2017, 39(7): 1576-1581. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||