Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (4): 1185-1192.doi: 10.12305/j.issn.1001-506X.2023.04.27
• Guidance, Navigation and Control • Previous Articles
Trajectory tracking control of autonomous vehicle based on steering and braking coordination
Yaoyao LI1, Chaoran GUO2, Yang LI2, Yuzhuang ZHAO2,*
- 1. Unit 63921 of the PLA, Beijing 100094, China
2. School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China
-
Received:2022-03-11Online:2023-03-29Published:2023-03-28 -
Contact:Yuzhuang ZHAO
CLC Number:
Cite this article
Yaoyao LI, Chaoran GUO, Yang LI, Yuzhuang ZHAO. Trajectory tracking control of autonomous vehicle based on steering and braking coordination[J]. Systems Engineering and Electronics, 2023, 45(4): 1185-1192.
share this article
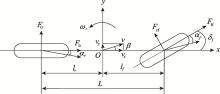
Fig.1
Vehicle three-degree-of-freedom dynamics model"
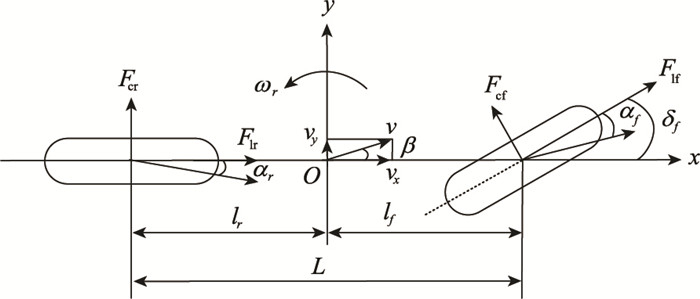
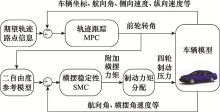
Fig.2
Control system chart"
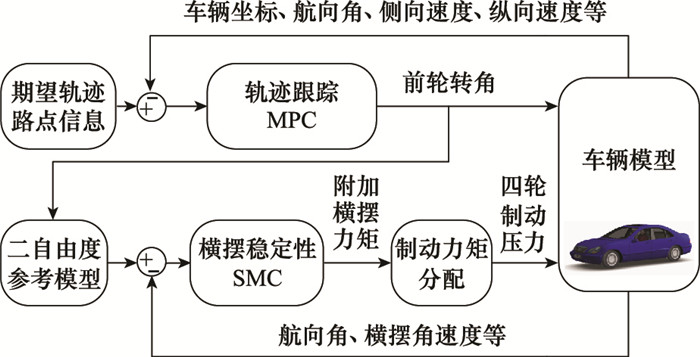
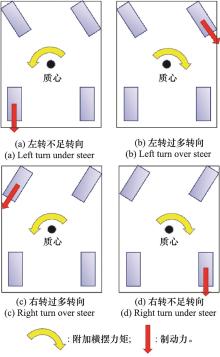
Fig.3
Differential brake distribution strategy"
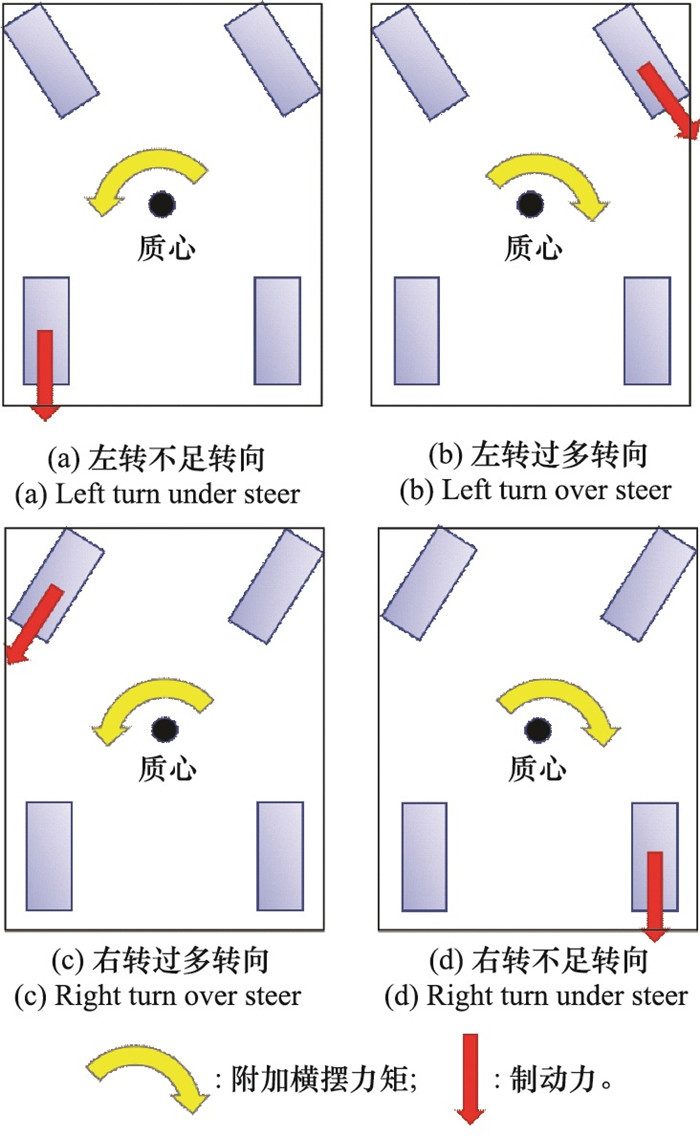
Table 1
Vehicle parameters"
| 参数 | 数值 |
| 整备质量m/kg | 2 210 |
| 质心到前轴距离lf/mm | 1 070 |
| 质心到后轴距离lr/mm | 2 232 |
| 转动惯量Iz/(kg·m2) | 4 331.6 |
| 侧偏刚度Cc/(N/rad) | 80 231 |
| 轮距B/mm | 1 900 |
| 质心高度h/mm | 660 |
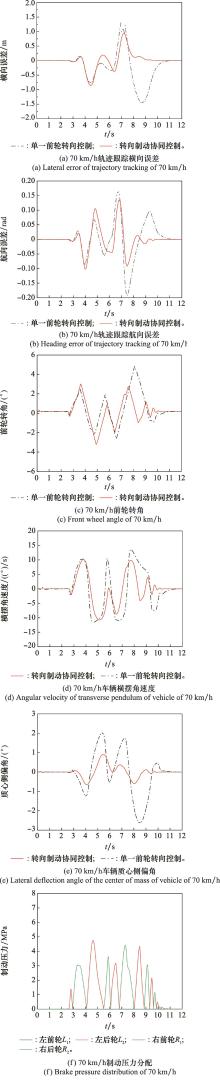
Fig.4
Results of simulation of 70 km/h, 0.35"
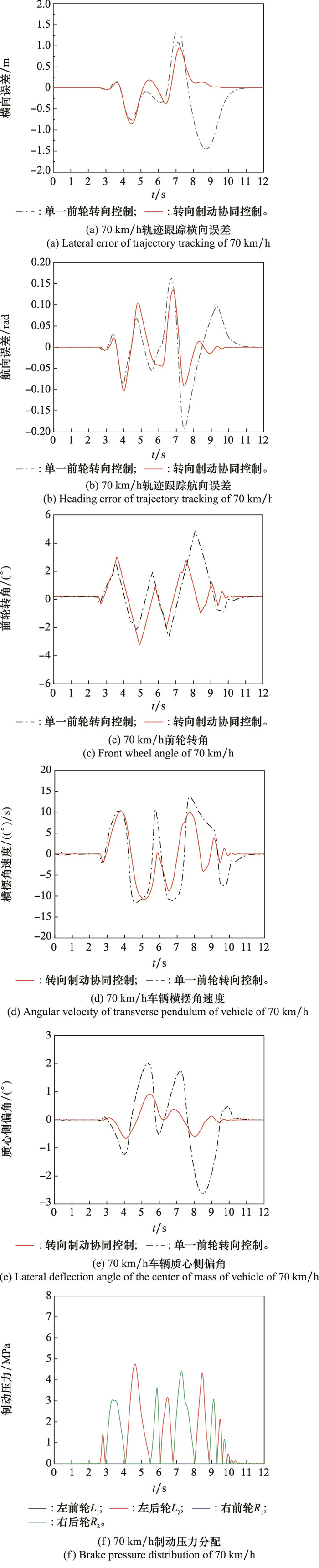
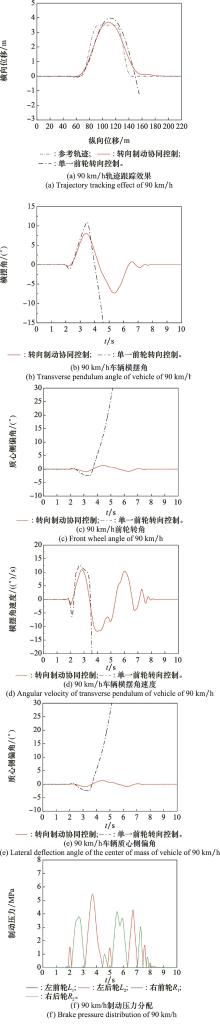
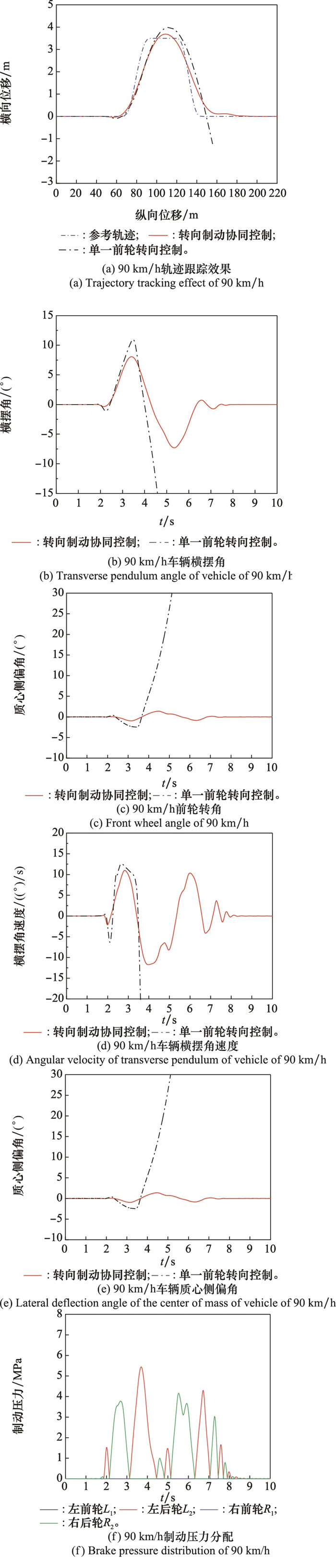
Fig.5
Results of simulation of 90 km/h, 0.35"
| 1 | 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38 (6): 1203- 1214. |
| CHEN H Y , CHEN S P , GONG J W . A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38 (6): 1203- 1214. | |
| 2 | MARINO R, SCALZI S, ORLANDO G, et al. A nested PID steering control for lane keeping in vision based autonomous vehicles[C]//Proc. of the IEEE American Control Conference, 2009: 2885-2890. |
| 3 |
FENTON R E , SELIM I . On the optimal design of an automotive lateral controller[J]. IEEE Trans.on Vehicular Technology, 1988, 37 (2): 108- 113.
doi: 10.1109/25.9890 |
| 4 | 赵熙俊, 刘海鸥, 熊光明, 等. 自动转向滑模变结构控制参数选取方法[J]. 北京理工大学学报, 2011, 31 (10): 1174- 1178. |
| ZHAO X J , LIU H O , XIONG G M , et al. Method of parameter selection for automatic steering sliding mode control[J]. Transactions of Beijing Institute of Technology, 2011, 31 (10): 1174- 1178. | |
| 5 | 张志勇, 龙凯, 杜荣华, 等. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43 (7): 995- 1004. |
| ZHANG Z Y , LONG K , DU R H , et al. Trajectory tracking coordinated control for autonomous vehicle in high-speed overtaking[J]. Automotive Engineering, 2021, 43 (7): 995- 1004. | |
| 6 |
KABZAN J , HEWING L , LINIGER A , et al. Learning-based model predictive control for autonomous racing[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 3363- 3370.
doi: 10.1109/LRA.2019.2926677 |
| 7 |
ROSOLIA U , ZHANG X , BORRELLI F . Data-driven predictive control for autonomous systems[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1, 259- 286.
doi: 10.1146/annurev-control-060117-105215 |
| 8 |
LUCIA S , KARG B . A deep learning-based approach to robust nonlinear model predictive control[J]. IFAC-PapersOnLine, 2018, 51 (20): 511- 516.
doi: 10.1016/j.ifacol.2018.11.038 |
| 9 | LEMAN Z A, ARIFF M H M, ZAMZURI H, et al. Model predictive controller for path tracking and obstacle avoidance manoeuvre on autonomous vehicle[C]//Proc. of the 12th Asian Control Conference, 2019: 1271-1276. |
| 10 |
REN Y , ZHENG L , KHAJEPOUR A . Integrated model predictive and torque vectoring control for path tracking of 4-wheel-driven autonomous vehicles[J]. IET Intelligent Transport Systems, 2019, 13 (1): 98- 107.
doi: 10.1049/iet-its.2018.5095 |
| 11 |
ATAEI M , KHAJEPOUR A , JEON S . Model predictive control for integrated lateral stability, traction/braking control, and rollover prevention of electric vehicles[J]. Vehicle System Dynamics, 2020, 58 (1): 49- 73.
doi: 10.1080/00423114.2019.1585557 |
| 12 | 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41 (10): 1109- 1116. |
| CHEN T , CHEN L , XU X , et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41 (10): 1109- 1116. | |
| 13 | 陈龙, 解云鹏, 蔡英凤, 等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42 (8): 1016- 1026. |
| CHEN L , XIE Y P , CAR Y F , et al. Stable tracking control of autonomous vehicles at extreme conditions[J]. Automotive Engineering, 2020, 42 (8): 1016- 1026. | |
| 14 | CHATZIKOMIS C , SORNIOTTI A , GRUBER P , et al. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles[J]. IEEE Trans.on Intelligent Vehicles, 2018, 3 (4): 559- 570. |
| 15 | JALALI M , KHAJEPOUR A , CHEN S , et al. Integrated stability and traction control for electric vehicles using model predictive control[J]. Control Engineering Practice, 2016, 54, 256- 266. |
| 16 | HOFFMAN R C , STEIN J L , LOUCA L S , et al. Using the milliken moment method and dynamic simulation to evaluate vehicle stability and controllability[J]. International Journal of Vehicle Design, 2008, 48 (1-2): 132- 148. |
| 17 | BOBIER C G , GERDES J C . Staying within the nullcline boundary for vehicle envelope control using a sliding surface[J]. Vehicle System Dynamics, 2013, 51, 199- 217. |
| 18 | CHUNG T , YI K . Design and evaluation of side slip angle-based vehicle stability control scheme on a virtual test track[J]. IEEE Trans.on Control Systems Technology, 2006, 14 (2): 224- 234. |
| 19 | BEAL C E, BOBIER C G, GERDES J C. Controlling vehicle instability through stable handling envelopes[C]//Proc. of the Dynamic Systems and Control Conference, 2011: 861-868. |
| 20 | SU J , WU J F , CHENG P , et al. Autonomous vehicle control through the dynamics and controller learning[J]. IEEE Trans.on Vehicular Technology, 2018, 67 (7): 5650- 5657. |
| 21 | BORRELLI F , FALCONE P , KEVICZKY T , et al. MPC-based approach to active steering for autonomous vehicle systems[J]. International Journal of Vehicle Autonomous Systems, 2005, 3 (2-4): 265- 291. |
| 22 | FALCONE P , ERIC T H , BORRELLI F , et al. MPC-based yaw and lateral stabilization via active front steering and braking[J]. Vehicle System Dynamics, 2008, 46 (S1): 611- 628. |
| 23 | YU R, GUO H, SUN Z, et al. MPC-based regional path tracking controller design for autonomous ground vehicles[C]//Proc. of the IEEE International Conference on Systems, Man, and Cybernetics, 2015: 2510-2515. |
| 24 | ZHONG Y H, GUO L L, ZHANG Y X, et al. Optimal lane change control of intelligent vehicle based on MPC[C]//Proc. of the IEEE 31st Chinese Control and Decision Conference, 2019: 1468-1473. |
| 25 | 邹旭东, 贾志强, 张丽霞. 智能车辆路径跟踪与稳定性的模型预测控制[J]. 济南大学学报, 2021, 35 (4): 315- 321. 315-321, 328 |
| ZOU X D , JIA Z Q , ZHANG L X , et al. Model predictive control for path tracking and stability of intelligent vehicles[J]. Journal of University of Jinan, 2021, 35 (4): 315- 321. 315-321, 328 | |
| 26 | FALCONE P, BORRELLI F, ASGARI J, et al. A model predictive control approach for combined braking and steering in autonomous vehicles[C]//Proc. of the IEEE Mediterranean Conference on Control and Automation, 2007. |
| 27 | 梁艺潇, 李以农, KHAJEPOURA, 等. 基于转向与主动横摆力矩协调的四轮驱动智能电动汽车路径跟踪控制[J]. 机械工程学报, 2021, 57 (6): 142- 155. |
| LIANG Y X , LI Y N , KHAJEPOUR A , et al. Path following control for four-wheel drive electric intelligent vehicle based on coordination between steering and direct yaw moment system[J]. Journal of Mechanical Engineering, 2021, 57 (6): 142- 155. | |
| 28 | XIE J , XU X , WANG F , et al. Coordinated control based path following of distributed drive autonomous electric vehicles with yaw-moment control[J]. Control Engineering Practice, 2021, 106, 104- 115. |
| 29 | 赵景波, 朱梁鹏, 刘成晔. 四轮转向智能车辆路径跟踪控制策略研究[J]. 系统仿真学报, 2021, 33 (10): 2390- 2398. |
| ZHAO J B , ZHU L P , LIU C Y , et al. Research on path tracking control strategy of four-wheel steering intelligent vehicle[J]. Journal of System Simulation, 2021, 33 (10): 2390- 2398. | |
| 30 | ZHANG L X , WU G Q . Combination of front steering and differential braking control for the path tracking of autonomous vehicle[J]. SAE Technical Paper, 2016, (1): 1627- 1639. |
| 31 | 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014. |
| GONG J W , JIANG Y , XU W . Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. | |
| 32 | ZHAO Y Z , CHEN S Z , SHIM T . Investigation of trailer yaw motion control using active front steer and differential brake[J]. SAE International Journal of Materials and Manufacturing, 2011, 4 (1): 1057- 1067. |
| [1] | Chuanxu LI, Xiuyun MENG, Jie WANG. Design of aircraft trajectory tracking controller based on disturbance observer [J]. Systems Engineering and Electronics, 2022, 44(8): 2593-2600. |
| [2] | Xinmin TANG, Pengcheng ZHENG. IMM aircraft short-term track extrapolation based on geodetic coordinate system [J]. Systems Engineering and Electronics, 2022, 44(7): 2293-2301. |
| [3] | Yanzhao LIU, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavioral decision-making methods of autonomous vehicles based on decision tree and BN [J]. Systems Engineering and Electronics, 2022, 44(10): 3143-3154. |
| [4] | Xiaoming CAO, Yong WEI, Hui HENG, Zhipeng SHEN. Dynamic surface backstepping trajectory tracking control of unmanned underwater vehicles with ocean current disturbances [J]. Systems Engineering and Electronics, 2021, 43(6): 1664-1672. |
| [5] | Xue SUN, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavior decision method of autonomous vehicle based on ontology and BN [J]. Systems Engineering and Electronics, 2021, 43(2): 452-465. |
| [6] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [7] | WANG Biao, TANG Chaoying, YAO Zhennan. Trajectory tracking control of unmanned aerial vehicles based oncascaded LADRC design [J]. Systems Engineering and Electronics, 2019, 41(6): 1358-1365. |
| [8] | ZHENG Shiyu, AI Xiaolin, YANG Di, JIA Zhenyue, YU Jianqiao. Integral backstepping based sliding mode trajectory tracking algorithm for quadrotor [J]. Systems Engineering and Electronics, 2019, 41(3): 643-650. |
| [9] | SHEN Zhipeng, BI Yannan, GUO Tantan, WANG Ru. Adaptive dynamic surface output feedback trajectory tracking control for underactuated ships with nonlinear observer [J]. Systems Engineering and Electronics, 2019, 41(2): 409-415. |
| [10] | WU Pengfei, SHI Zhangsong, WU Zhonghong, WANG Zhi. Trajectory tracking and control for unmanned helicopter’s autonomous landing on ship [J]. Systems Engineering and Electronics, 2019, 41(11): 2573-2580. |
| [11] | CHAO Tao, WANG Yuxiao, WANG Songyan, YANG Ming. Trajectory tracking control for non-minimum phase hypersonic vehicles [J]. Systems Engineering and Electronics, 2018, 40(7): 1548-1553. |
| [12] | SHEN Zhipeng, WANG Ru. Adaptive sliding mode trajectory tracking control of underactuated ship based on DSC-MLP [J]. Systems Engineering and Electronics, 2018, 40(3): 643-651. |
| [13] | CHEN Nanyu, HUANG Jun, ZHOU Yaoming, ZHAO Wenlong. Trajectory robust tracking control of unmanned helicopter based on extended state observer [J]. Systems Engineering and Electronics, 2018, 40(2): 368-374. |
| [14] | WANG Yue, HE Zhen, ZHANG Jianlan, YUAN Liang, LU Yuping. Switching control design and calculation of domain of attraction for aircraft in perching maneuvers [J]. Systems Engineering and Electronics, 2018, 40(11): 2519-. |
| [15] | ZHU Qi-dan, MA Jun-da, LIU Zhi-lin. Adaptive finite time trajectory tracking for autonomous surface vehicle with unknown disturbance [J]. Systems Engineering and Electronics, 2016, 38(2): 368-374. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||