Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (2): 508-518.doi: 10.12305/j.issn.1001-506X.2021.02.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Attitude control for spacecraft with uncertain parameters based on improved iterative learning
Xiaoman KE( ), Yunhua WU(), Mohong ZHENG(), Wenxing LI(), Jinming DU(), Bing HUA(), Zhiming CHEN()
), Yunhua WU(), Mohong ZHENG(), Wenxing LI(), Jinming DU(), Bing HUA(), Zhiming CHEN()
- Academy of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
-
Received:2020-06-01Online:2021-02-01Published:2021-03-16
CLC Number:
Cite this article
Xiaoman KE, Yunhua WU, Mohong ZHENG, Wenxing LI, Jinming DU, Bing HUA, Zhiming CHEN. Attitude control for spacecraft with uncertain parameters based on improved iterative learning[J]. Systems Engineering and Electronics, 2021, 43(2): 508-518.
share this article

Fig.1
Feedback-ILC flow chart (parallel structure)"
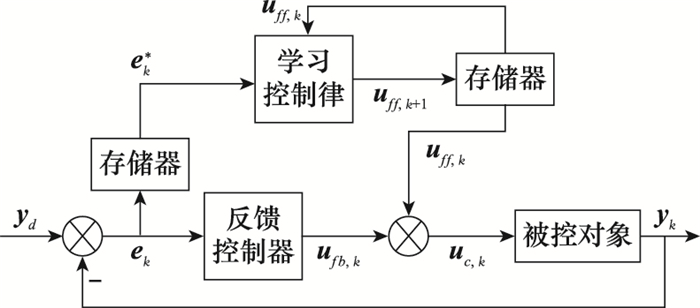

Fig.2
Configuration diagram of hybrid actuator"
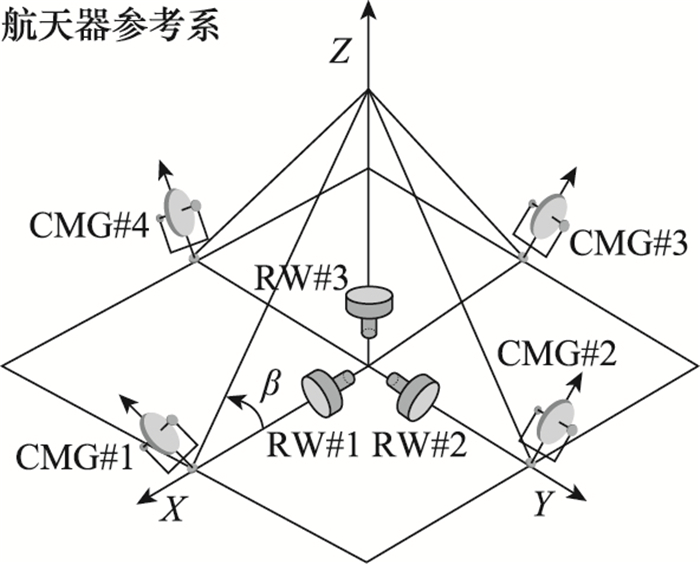
Table 1
Controller parameters"
| 参数 | 取值 |
| 转动惯量不确定性χ/% | 50 |
| 转动惯量J/(kg·m2) | |
| 控制约束U/(N·m) | 0.05 |
| 最大机动角速度ωmax/((°)/s) | 2.5 |
| 最大机动角加速度a/((°)/s2) | 0.6U[1/Jx 1/Jy 1/Jz] |
| 控制增益p, c, kp, kd | 50, 18, 0.1, 0.4 |
| 采样周期δ/s | 0.1 |
| 反步法控制器参数 α, b1, b2, b3, b4, b5, b6 | 0.25, 5, 5, 5, 0.01, diag(10.6, 10.2, 10.4), 0.004 |
Table 2
Hybrid actuator parameters"
| 参数 | 量值 |
| CMG转子动量矩h0/(N·m·s) | 0.4 |
| CMG框架倾角β/(°) | 54.04 |
| CMG框架角初值α0/(°) | [30, 70, 40, -100] |
| CMG框架角速度最大值ȧmax/(rad/s) | 1 |
| RW转动惯量JRW/(kg·m2) | diag(35, 35, 35)10-4 |
| RW角速度初值Ω0/(r/min) | [25/6 25/6 25/6] |
| RW角速度最大值Ωmax/(r/min) | 3 000 |
| RW角加速度 最大值 | 10 |
| 加权矩阵W | diag(5, 5, 5, 5, 500, 500, 500) |
| 零运动强度 | 180exp(-10SCMG) |
| 性能函数参数 τ1, τ2, λ1, λ2, λ3 | 80, 100, 1/9, 5/9, 3/9 |
Table 3
Simulation results of attitude angle error"
| 层数 | 最大波峰值/(°) | 调节时间/s |
| 1 | 1.776 | 39.288 |
| 2 | 1.545 | 38.734 |
| 9 | 8.347×10-2 | 37.941 |
| 10 | 4.081×10-2 | 36.489 |
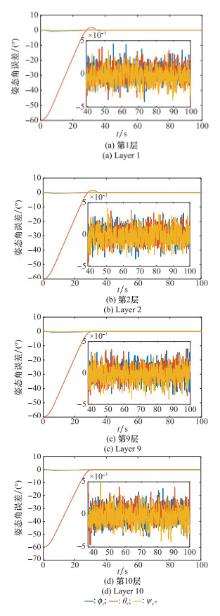
Fig.3
Attitude angle error"

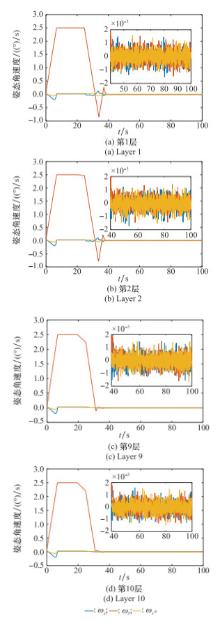
Fig.4
Attitude angular velocity"
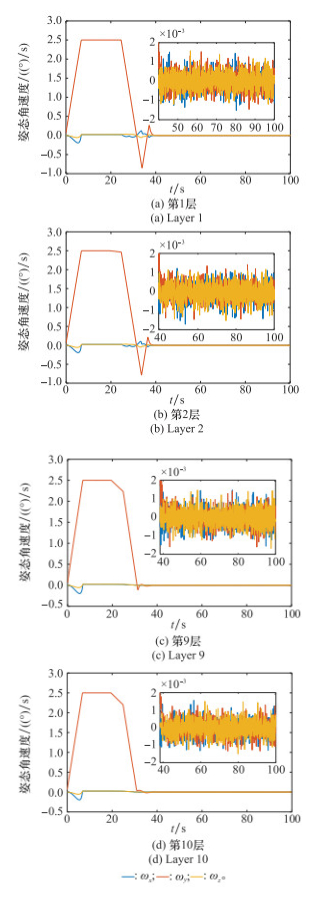

Fig.5
Attitude angle error (backstepping)"
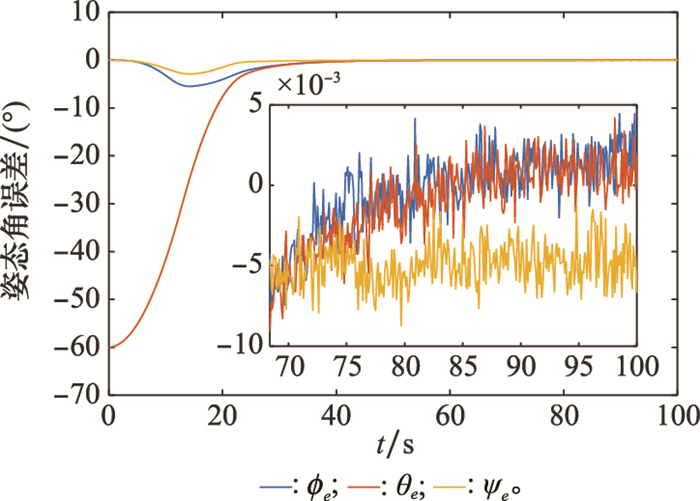
Fig.6
Attitude angular velocity (backstepping)"
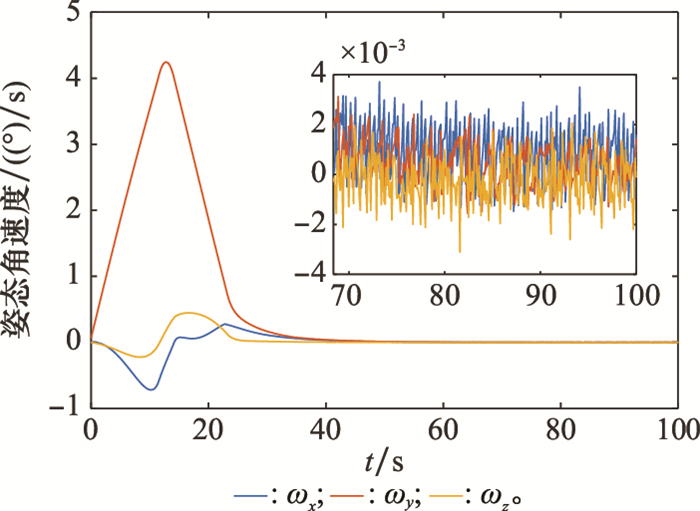
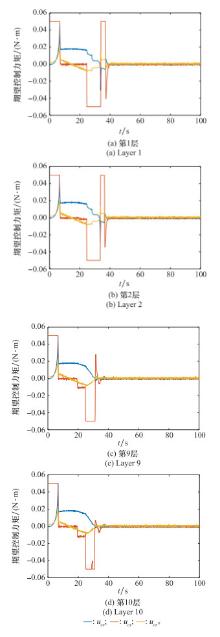
Fig.7
Desired control torque"
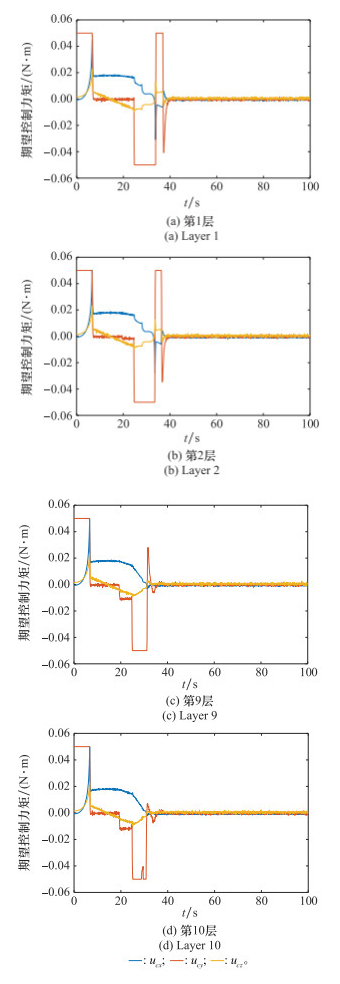

Fig.8
Output error of control torque"
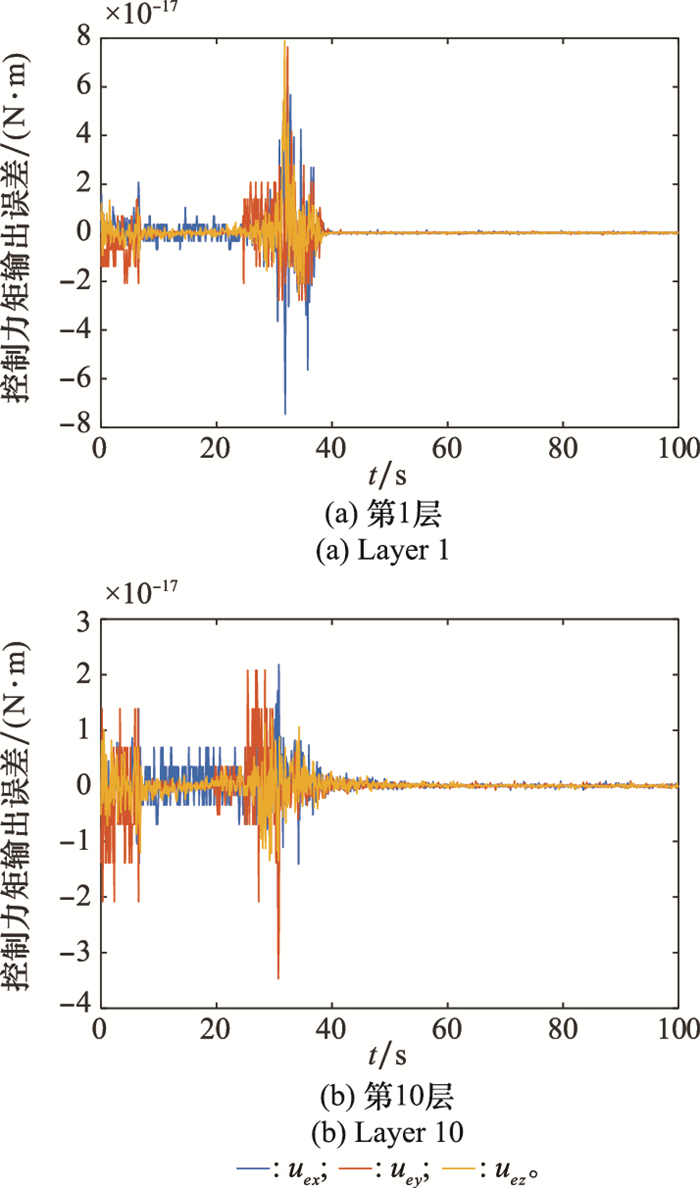

Fig.9
Hybrid actuator performance"
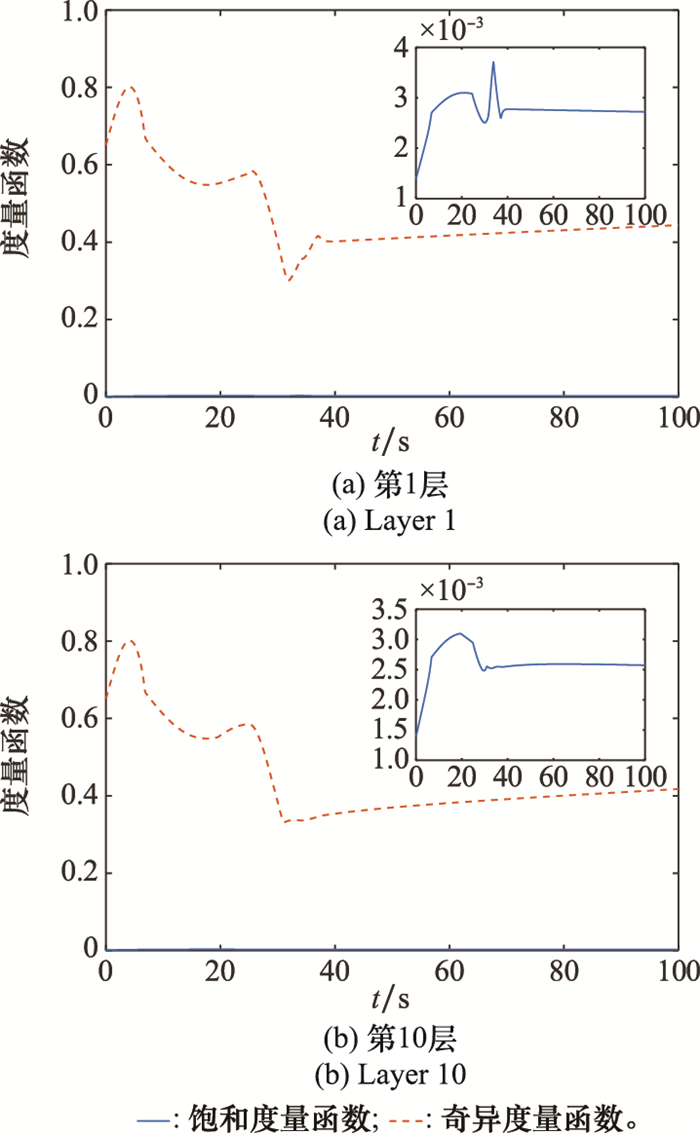

Fig.10
Desired control torque (backstepping)"
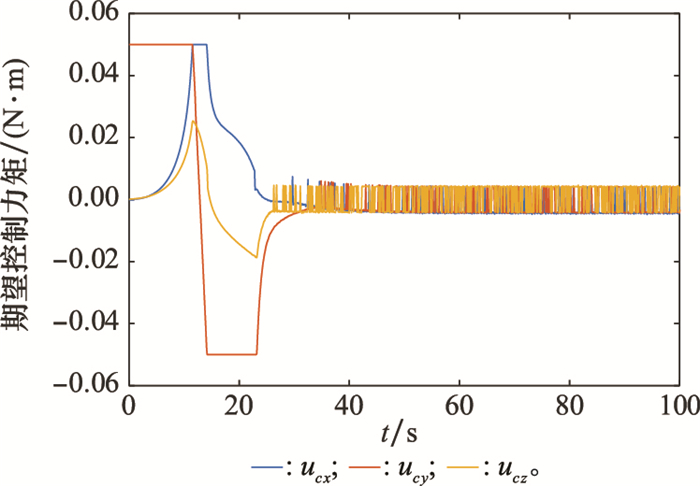

Fig.11
Output error of control torque (backstepping)"
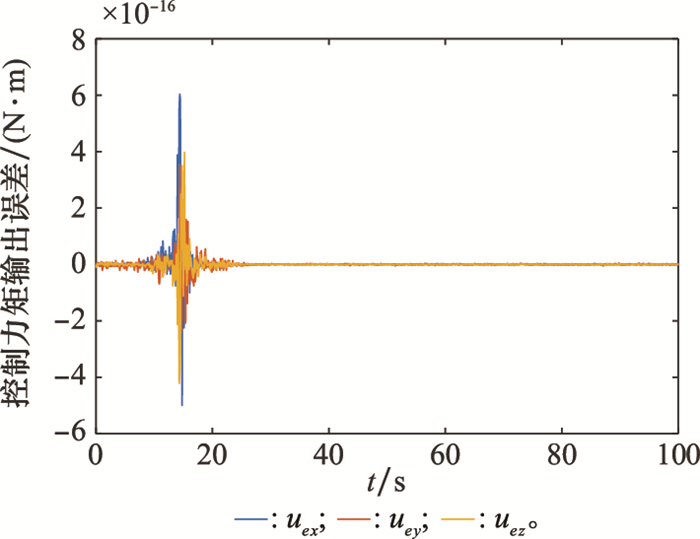
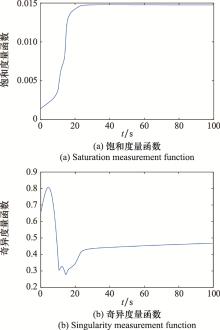
Fig.12
Hybrid actuator performance (backstepping)"

| 1 | 王雪瑶, 宋博. 美国国防高级研究计划局启动"地球同步轨道卫星自主服务"项目[J]. 国际太空, 2016, 37 (11): 33- 38. |
| WANG X Y , SONG B . DARPA started the RSGS program[J]. Space International, 2016, 37 (11): 33- 38. | |
| 2 |
GUO Y , HUANG B , SONG S M , et al. Robust saturated finite-time attitude control for spacecraft using integral sliding mode[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (2): 440- 446.
doi: 10.2514/1.G003520 |
| 3 | CAO T , GONG H J , HAN B . Sliding mode fault tolerant attitude control scheme for spacecraft with actuator faults[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2019, 36 (1): 123- 131. |
| 4 |
CONG B L , LIU X D , CHEN Z . Backstepping based adaptive sliding mode control for spacecraft attitude maneuvers[J]. Aerospace Science and Technology, 2013, 30 (1): 1- 7.
doi: 10.1016/j.ast.2013.05.005 |
| 5 |
THAKUR D , SRIKANT S , AKELLA M R . Adaptive attitude-tracking control of spacecraft with uncertain time-varying inertia parameters[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (1): 41- 52.
doi: 10.2514/1.G000457 |
| 6 |
SUN L , ZHENG Z W . Saturated adaptive hierarchical fuzzy attitude-tracking control of rigid spacecraft with modeling and measurement uncertainties[J]. IEEE Trans.on Industrial Electronics, 2019, 66 (5): 3742- 3751.
doi: 10.1109/TIE.2018.2856204 |
| 7 |
BI X T , SHI X P . Attitude stabilization of rigid spacecraft implemented in backstepping control with input delay[J]. Journal of Systems Engineering and Electronics, 2017, 28 (5): 955- 962.
doi: 10.21629/JSEE.2017.05.13 |
| 8 | 李波, 胡庆雷, 石忠, 等. 基于反步法与动态控制分配的航天器姿态机动控制[J]. 控制理论与应用, 2012, (11): 1419- 1425. |
| LI B , HU Q L , SHI Z , et al. Backstepping and dynamic control-allocation for attitude maneuver spacecraft with redundant reaction fly-wheels[J]. Control Theory & Applications, 2012, (11): 1419- 1425. | |
| 9 |
WU Y H , ZHENG M H , HE W , et al. High precision attitude dynamic tracking control of a moving space target[J]. Chinese Journal of Aeronautics, 2019, 32 (10): 2324- 2336.
doi: 10.1016/j.cja.2019.06.005 |
| 10 | 孙明轩, 黄宝健. 迭代学习控制[M]. 北京: 国防工业出版社, 1999. |
| SUN M X , HUANG B J . Iterative learning control[M]. Beijing: National Defense Industry Press, 1999. | |
| 11 | 代明光, 齐蓉, 李兵强, 等. 具有自适应非线性增益的开环PD型迭代学习控制[J]. 系统工程与电子技术, 2020, 42 (3): 660- 666. |
| DAI M G , QI R , LI B Q , et al. Open-loop PD-type iterative learning control with adaptive nonlinear gain[J]. Systems Engineering and Electronics, 2020, 42 (3): 660- 666. | |
| 12 |
WANG D W . On D-type and P-type ILC designs and anticipatory approach[J]. International Journal of Control, 2000, 73 (10): 890- 901.
doi: 10.1080/002071700405879 |
| 13 |
WU B L , WANG D W , POH E K . High precision satellite attitude tracking control via iterative learning control[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (3): 528- 534.
doi: 10.2514/1.G000497 |
| 14 | HU Q L , NIU G L , WANG C L . Spacecraft attitude fault-tolerant control based on iterative learning observer and control allocation[J]. Aerospace Science and Technology, 2018, 75 (4): 245- 253. |
| 15 | LEE H J , KIM Y D , KIM H S . Satellite attitude control with a modified iterative learning law for the decrease in the effectiveness of the actuator[J]. International Journal of Aeronautical & Space Sciences, 2010, 11 (2): 87- 97. |
| 16 |
ZHANG L J , YU C M , ZHANG S F , et al. Optimal attitude trajectory planning method for CMG actuated spacecraft[J]. Proceedings of the Institution of Mechanical Engineers, 2018, 232 (1): 131- 142.
doi: 10.1177/0954410016687596 |
| 17 |
张佳为, 马克茂, 孟桂芝. 具有单框架控制力矩陀螺航天器的建模及可控性分析[J]. 系统工程与电子技术, 2012, 34 (4): 761- 766.
doi: 10.3969/j.issn.1001-506X.2012.04.22 |
|
ZHANG J W , MA K M , MENG G Z . Modeling of spacecraft attitude systems with single gimbal control moment gyros and controllability analysis[J]. Systems Engineering and Electronics, 2012, 34 (4): 761- 766.
doi: 10.3969/j.issn.1001-506X.2012.04.22 |
|
| 18 | WIE B . Singularity escape/avoidance steering logic for control moment gyro systems[J]. Journal of Guidance, Control, and Dynamics, 2003, 28 (5): 948- 956. |
| 19 |
KARLGAARD C D . Robust reorientation and power controller using flywheels and control moment gyroscopes[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (1): 217- 220.
doi: 10.2514/1.17113 |
| 20 | WU Y H , HAN F , ZHANG S J , et al. Attitude agile maneuvering control for spacecraft equipped with hybrid actuators[J]. Journal of Guidance, Control, and Dynamics, 2018, 41 (3): 803- 812. |
| 21 |
HUANG X H , JIA Y H , XU S J , et al. A new steering approach for VSCMGs with high precision[J]. Chinese Journal of Aeronautics, 2016, 29 (6): 1673- 1684.
doi: 10.1016/j.cja.2016.10.017 |
| 22 |
BRISTOW D A , THARAYIL M , ALLEYNE A G . A survey of iterative learning control[J]. IEEE Control Systems Magazine, 2006, 26 (3): 96- 114.
doi: 10.1109/MCS.2006.1636313 |
| 23 |
WIE B , LU J . Feedback control logic for spacecraft eigenaxis rotations under slew rate and control constraints[J]. Journal of Guidance, Control, and Dynamics, 1995, 18 (6): 1372- 1379.
doi: 10.2514/3.21555 |
| 24 |
WIE B , BAILEY D , HEIBERG C . Rapid multitarget acquisition and pointing control of agile spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2002, 25 (1): 96- 104.
doi: 10.2514/2.4854 |
| 25 | KOJIMA H. Singularity analysis and steering control laws for adaptive-skew pyramid-type control moment gyros[C]//Proc.of the 62nd International Astronautical Congress, 2013: 120-137. |
| 26 | WU Y H , HAN F , HUA B , et al. Null motion strategy for spacecraft large angle agile maneuvering using hybrid actuators[J]. Acta Astronautica, 2017, 140 (11): 459- 468. |
| [1] | Mingguang DAI, Rong QI, Bingqiang LI, Yiyun ZHAO. Open-loop PD-type iterative learning control with adaptive nonlinear gain [J]. Systems Engineering and Electronics, 2020, 42(3): 660-666. |
| [2] | LIU Zhenya, GAO Min, CHENG Cheng. Line-of-sight angle estimation algorithm based on ideal trajectory robust cubature Kalman filter [J]. Systems Engineering and Electronics, 2018, 40(2): 409-416. |
| [3] | LAN Tianyi, LIN Hui. Accelerated iterative learning control algorithm with variable gain and adjustment of learning interval [J]. Systems Engineering and Electronics, 2017, 39(4): 883-887. |
| [4] | ZHANG Kejun, PENG Guohua. Convergence analysis of PDα-type fractional-order iterative learning control in the sense of Lp norm [J]. Systems Engineering and Electronics, 2017, 39(10): 2285-2290. |
| [5] | YIN Yanling1, WANG Taihua1, ZENG Qi2. Networkbased iterative learning control design based on 2D model [J]. Systems Engineering and Electronics, 2015, 37(5): 1157-1162. |
| [6] | LI Xiangyang. Iterative learning control based on equivalent control [J]. Systems Engineering and Electronics, 2014, 36(7): 1397-1404. |
| [7] | HUANG Li-xun, FANG Yong. Convergence analysis of iterative learning control system in the presence of data dropouts [J]. Systems Engineering and Electronics, 2014, 36(2): 361-367. |
| [8] | LAN Yong-hong,HE Lü-jun,HUANG Hui-xian, LUO Yi-ping. P-type iterative learning control of fractional order nonlinear time-delay system [J]. Journal of Systems Engineering and Electronics, 2013, 35(5): 1070-1074. |
| [9] | JIANG Xiao-ming, WANG Yan, WANG Cheng, CHEN Xing-lin. Robust iterative learning control and its application to high precision test bench [J]. Journal of Systems Engineering and Electronics, 2013, 35(3): 601-608. |
| [10] | YAN Bing-yong, WANG Hua-zhong. Novel fault diagnosis approach based on fault tracking approximator [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 377-380. |
| [11] | LI Jiancheng, XI Tao. Spacecraft attitude control scheme based on sliding mode controller with iterative learning law [J]. Journal of Systems Engineering and Electronics, 2012, 34(9): 1895-1899. |
| [12] | CAO Wei, CONG Wang, SUN Ming. Iterative learning control of variable index gain with initial state study [J]. Journal of Systems Engineering and Electronics, 2012, 34(4): 773-777. |
| [13] | DAI Xi-sheng, TIAN Sen-ping. Iterative learning control for uncertain linear distributed parameter systems with control delay [J]. Journal of Systems Engineering and Electronics, 2012, 34(10): 2117-2120. |
| [14] | CAO Wei, CONG Wang, SUN Ming. Fault diagnosis algorithm based on proportional difference type iteration learning [J]. Journal of Systems Engineering and Electronics, 2012, 34(10): 2106-2109. |
| [15] | JIA Qingxian, ZHANG Yingchun, SHEN Yi, WU Lina. Robust fault reconstruction method for satellite attitude control system based on iterative learningunknown input observer [J]. Journal of Systems Engineering and Electronics, 2012, 34(1): 120-124. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||