Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (12): 3952-3965.doi: 10.12305/j.issn.1001-506X.2025.12.20
• Model-Based System Architecture Design and Verification • Previous Articles
Two-echelon unmanned vehicles collaborative delivery routing optimization in closed and open scenes
Xiaolong DIAO1, Houming FAN1,*, Yang LI2, Zimu BIAN1, Shuo WEI1, Binghao ZHANG1
- 1. College of Transportation Engineering,Dalian Maritime University,Dalian 116026,China
2. School of Economics and Management,Liaoning Petrochemical University,Fushun 113001,China
-
Received:2025-02-24Revised:2025-04-29Online:2025-06-11Published:2025-06-11 -
Contact:Houming FAN
CLC Number:
Cite this article
Xiaolong DIAO, Houming FAN, Yang LI, Zimu BIAN, Shuo WEI, Binghao ZHANG. Two-echelon unmanned vehicles collaborative delivery routing optimization in closed and open scenes[J]. Systems Engineering and Electronics, 2025, 47(12): 3952-3965.
share this article
Table 1
Comparison of similar studies"
| 文献 | A | B | C | D | E | F | 目标 | 模型 | 求解方法 |
| [ | Y | N | N | N | N | Y | 成本最小 | 混合整数 | Gurobi和Spreadsheet求解器 |
| [ | Y | N | N | N | N | N | 成本最小 | 混合整数 | 遗传算法和Concorde求解器 |
| [ | Y | N | N | N | N | N | 成本最小与客户满意度最大 | 混合整数 | 改进的非支配排序遗传算法-II |
| [ | Y | N | N | N | N | N | 成本最小 | 混合整数 | 分支定价算法 |
| [ | N | N | Y | N | N | Y | 配送时间 | 混合整数 | 两阶段启发式算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 启发式算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 变邻域搜索算法 |
| [ | N | Y | Y | N | N | Y | 成本最小 | 混合整数 | 启发式算法 |
| [ | N | Y | Y | Y | N | Y | 成本最小 | 混合整数 | 自适应大邻域搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 改进的变邻域搜索算法 |
| [ | N | Y | Y | N | N | Y | 迟到配送客户数最小 | 混合整数 | 局部搜索算法 |
| [ | N | Y | Y | Y | N | Y | 成本最小 | 混合整数 | 混合多起点启发式算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 自适应大邻域搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 贪婪随机自适应搜索算法 |
| [ | N | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 基于聚类的变邻域搜索算法 |
| 本文 | Y | Y | Y | Y | Y | Y | 成本最小 | 混合整数 | 改进的变邻域搜索算法 |

Fig.1
Two-echelon unmanned vehicle delivery network"
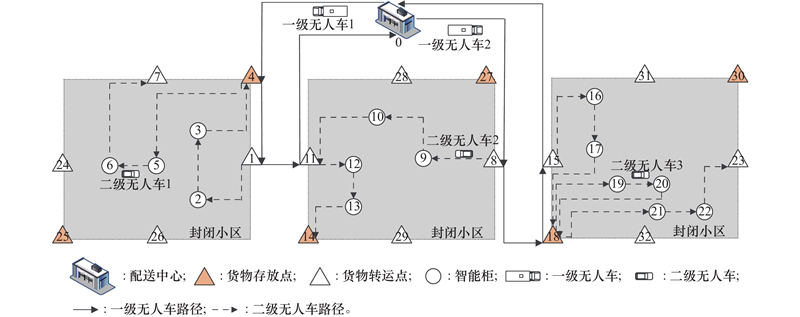
Table 2
Explanation of set symbols"
| 集合 | 说明 |
| 封闭小区集合, | |
| 一级无人车集合, | |
| 二级无人车集合, | |
| 节点集合, | |
| 二级无人车配送次序集合,二级无人车从某一货物存放点或货物转运点出发,完成配送任务返回到某一货物存放点或货物转运点视为一次配送。 |
Table 3
Explanation of set parameters"
| 参数 | 说明 |
| 配送中心的工作时间窗 | |
| 智能柜 | |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车在货物转运点的最大等待时间 | |
| 点 | |
| 一级无人车的平均速度 | |
| 二级无人车的平均速度 | |
| 一个比较大的正数 | |
| 一级无人车在货物存放点卸下单位货物所需时间 | |
| 一级与二级无人车在货物转运点转运单位货物所需时间 | |
| 二级无人车在货物存放点装载单位货物所需时间 | |
| 二级无人车在智能柜卸下货物所需时间 | |
| 单位一级无人车派遣成本 | |
| 一级无人车单位距离的运输成本 | |
| 货物存放点存放单位货物产生的存储成本 | |
| 二级无人车单位距离的运输成本 |
Table 4
Explanation of symbols for intermediate variables"
| 中间变量 | 说明 |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车 | |
| 一级无人车 | |
| 二级无人车 | |
| 二级无人车 |
Table 5
Explanation of symbols for decision-making variables"
| 决策变量 | 说明 |
| 一级无人车 | |
| 二级无人车 | |
| 一级无人车 | |
| 二级无人车 |
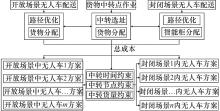
Fig.2
Modeling pathway"
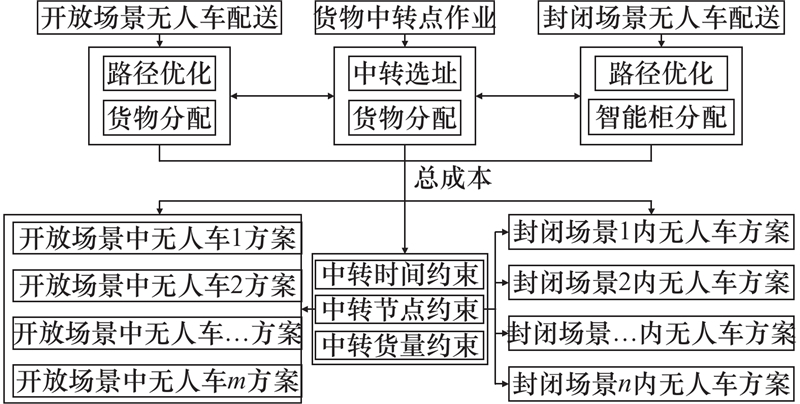
Fig.3
Algorithm framework"
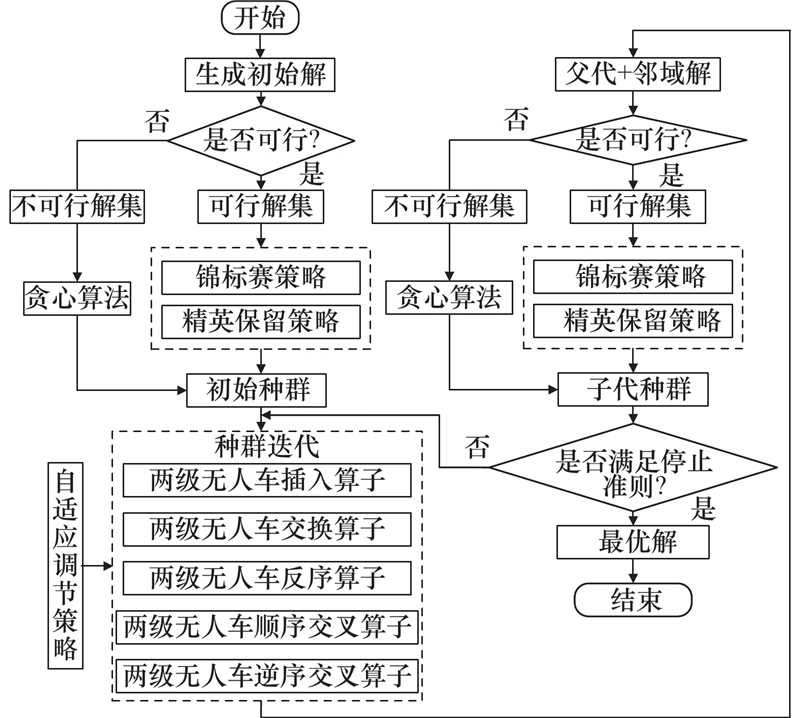
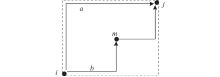
Fig.4
Example of theorem"
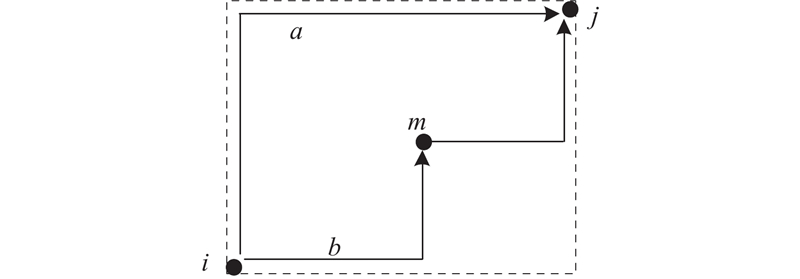

Fig.5
Examples of operators"
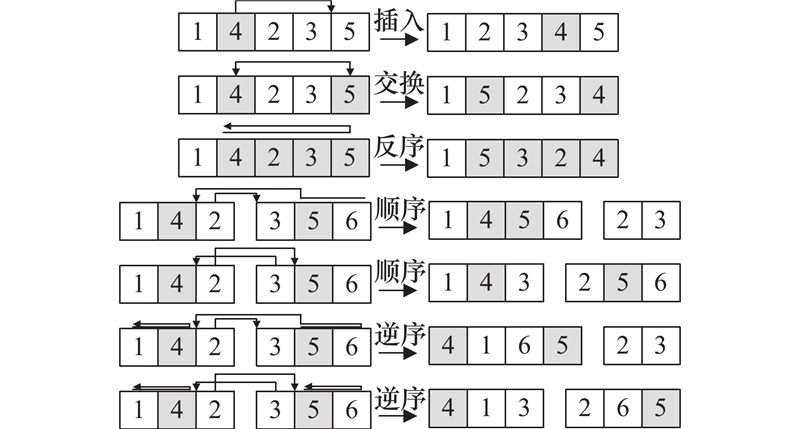
Table 6
Solutions result of different algorithms"
| 算例 | INSA | GRASP | 本文算法 | ||||||||||||||
| Avg | Min | Max | Time/s | GAP | Avg | Min | Max | Time/s | GAP | Avg | Min | Max | Time/s | GAP | |||
| A1 | 7.3 | 0.007 | 2.6 | 0.007 | 5.7 | 0.006 | |||||||||||
| A2 | 7.3 | 0.012 | 2.6 | 0.005 | 5.3 | 0.013 | |||||||||||
| A3 | 7.9 | 0.017 | 1.9 | 0.012 | 5.2 | 0.013 | |||||||||||
| A4 | 6.2 | 0.008 | 2.1 | 0.006 | 4.6 | 0.001 | |||||||||||
| B1 | 6.7 | 0.026 | 1.8 | 0.007 | 4.2 | 0.019 | |||||||||||
| B2 | 6.2 | 0.059 | 2.1 | 0.007 | 4.9 | 0.029 | |||||||||||
| B3 | 6.4 | 0.009 | 2.3 | 0.011 | 4.7 | 0.011 | |||||||||||
| B4 | 7.1 | 0.012 | 2.1 | 0.016 | 4.7 | 0.009 | |||||||||||
| C1 | 5.8 | 0.033 | 1.8 | 0.015 | 4.0 | 0.028 | |||||||||||
| C2 | 6.9 | 0.021 | 1.9 | 0.008 | 4.2 | 0.025 | |||||||||||
| C3 | 6.4 | 0.031 | 1.9 | 0.016 | 4.4 | 0.036 | |||||||||||
| C4 | 7.1 | 0.019 | 2.6 | 0.020 | 5.4 | 0.017 | |||||||||||
| A5 | 31.3 | 0.048 | 16.4 | 0.043 | 20.3 | 0.045 | |||||||||||
| A6 | 37.9 | 0.035 | 17.3 | 0.030 | 21.7 | 0.019 | |||||||||||
| A7 | 40.2 | 0.034 | 19.6 | 0.034 | 25.0 | 0.033 | |||||||||||
| A8 | 32.5 | 0.028 | 16.4 | 0.037 | 20.0 | 0.030 | |||||||||||
| B5 | 33.5 | 0.056 | 12.7 | 0.040 | 16.0 | 0.043 | |||||||||||
| B6 | 29.0 | 0.048 | 15.6 | 0.043 | 17.6 | 0.046 | |||||||||||
| B7 | 29.0 | 0.044 | 16.7 | 0.026 | 20.7 | 0.047 | |||||||||||
| B8 | 31.6 | 0.054 | 15.8 | 0.032 | 19.9 | 0.064 | |||||||||||
| C5 | 36.3 | 0.051 | 15.8 | 0.039 | 20.6 | 0.045 | |||||||||||
| C6 | 33.2 | 0.062 | 15.7 | 0.034 | 19.4 | 0.054 | |||||||||||
| C7 | 32.2 | 0.038 | 15.3 | 0.044 | 18.5 | 0.058 | |||||||||||
| C8 | 32.5 | 0.054 | 15.3 | 0.055 | 18.7 | 0.049 | |||||||||||
| A9 | 71.3 | 0.042 | 45.7 | 0.040 | 56.4 | 0.046 | |||||||||||
| A10 | 92.2 | 0.064 | 47.8 | 0.070 | 60.8 | 0.057 | |||||||||||
| A11 | 88.1 | 0.047 | 47.8 | 0.050 | 59.3 | 0.048 | |||||||||||
| A12 | 89.8 | 0.068 | 45.9 | 0.073 | 56.8 | 0.047 | |||||||||||
| B9 | 90.3 | 0.063 | 43.4 | 0.083 | 50.7 | 0.049 | |||||||||||
| B10 | 89.6 | 0.040 | 45.8 | 0.055 | 56.0 | 0.047 | |||||||||||
| B11 | 88.6 | 0.061 | 45.8 | 0.080 | 54.0 | 0.052 | |||||||||||
| B12 | 87.8 | 0.056 | 47.8 | 0.060 | 57.7 | 0.057 | |||||||||||
| C9 | 96.1 | 0.069 | 47.9 | 0.053 | 61.0 | 0.070 | |||||||||||
| C10 | 92.5 | 0.054 | 47.9 | 0.055 | 62.8 | 0.060 | |||||||||||
| C11 | 68.4 | 0.062 | 42.5 | 0.062 | 49.4 | 0.052 | |||||||||||
| C12 | 78.9 | 0.076 | 45.3 | 0.064 | 55.8 | 0.073 | |||||||||||
Table 7
Solution results of different strategies"
| 算例 | S1 | S2 | S3 | S4 | |||||||
| Avg | Time/s | Avg | Time/s | Avg | Time/s | Avg | Time/s | ||||
| A1 | 3.1 | 3.2 | 5.6 | 5.7 | |||||||
| A2 | 4.0 | 4.1 | 5.3 | 5.3 | |||||||
| A3 | 3.4 | 3.5 | 4.7 | 5.2 | |||||||
| A4 | 2.9 | 3.2 | 4.5 | 4.6 | |||||||
| B1 | 3.4 | 3.5 | 4.1 | 4.2 | |||||||
| B2 | 4.0 | 3.7 | 4.9 | 4.9 | |||||||
| B3 | 3.2 | 3.2 | 4.7 | 4.7 | |||||||
| B4 | 3.5 | 3.7 | 4.9 | 4.7 | |||||||
| C1 | 2.9 | 3.0 | 3.7 | 4.0 | |||||||
| C2 | 2.6 | 2.7 | 4.3 | 4.2 | |||||||
| C3 | 3.4 | 3.5 | 4.2 | 4.4 | |||||||
| C4 | 4.1 | 4.2 | 5.5 | 5.4 | |||||||
| A5 | 15.5 | 16.8 | 20.3 | 20.3 | |||||||
| A6 | 17.2 | 17.6 | 21.5 | 21.7 | |||||||
| A7 | 20.2 | 21.0 | 25.0 | 25.0 | |||||||
| A8 | 15.5 | 16.9 | 20.0 | 20.0 | |||||||
| B5 | 13.1 | 13.3 | 15.0 | 16.0 | |||||||
| B6 | 14.4 | 15.0 | 17.7 | 17.6 | |||||||
| B7 | 15.1 | 15.7 | 20.1 | 20.7 | |||||||
| B8 | 14.2 | 15.0 | 19.7 | 19.9 | |||||||
| C5 | 15.0 | 15.3 | 20.8 | 20.6 | |||||||
| C6 | 14.1 | 14.1 | 19.5 | 19.4 | |||||||
| C7 | 14.1 | 14.2 | 18.5 | 18.5 | |||||||
| C8 | 14.2 | 15.1 | 18.6 | 18.7 | |||||||
| A9 | 39.6 | 41.7 | 56.4 | 56.4 | |||||||
| A10 | 13.2 | 43.2 | 59.7 | 60.8 | |||||||
| A11 | 43.2 | 43.2 | 59.5 | 59.3 | |||||||
| A12 | 42.0 | 43.0 | 56.8 | 56.8 | |||||||
| B9 | 38.6 | 39.7 | 49.9 | 50.7 | |||||||
| B10 | 38.7 | 41.4 | 54.7 | 56.0 | |||||||
| B11 | 37.7 | 40.1 | 54.0 | 54.0 | |||||||
| B12 | 42.2 | 43.3 | 57.8 | 57.7 | |||||||
| C9 | 45.5 | 47.3 | 60.3 | 61.0 | |||||||
| C10 | 45.5 | 48.6 | 64.0 | 62.8 | |||||||
| C11 | 34.0 | 34.5 | 48.0 | 49.4 | |||||||
| C12 | 35.8 | 37.5 | 52.3 | 55.8 | |||||||
Table 8
Solutions result of two methods"
| 算例 | 方法 | 不可行解比例 | |||||||
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | ||
| A2 | T1 | ||||||||
| T2 | |||||||||
| B1 | T1 | ||||||||
| T2 | |||||||||
| C4 | T1 | ||||||||
| T2 | |||||||||
| A6 | T1 | ||||||||
| T2 | |||||||||
| B5 | T1 | ||||||||
| T2 | |||||||||
| C8 | T1 | ||||||||
| T2 | |||||||||
| A10 | T1 | ||||||||
| T2 | |||||||||
| B11 | T1 | ||||||||
| T2 | |||||||||
| C12 | T1 | ||||||||
| T2 | |||||||||
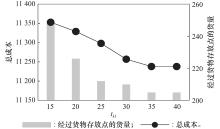
Fig.6
Sensitivity analysis chart about ${t_{{k_1}}}$of A4"
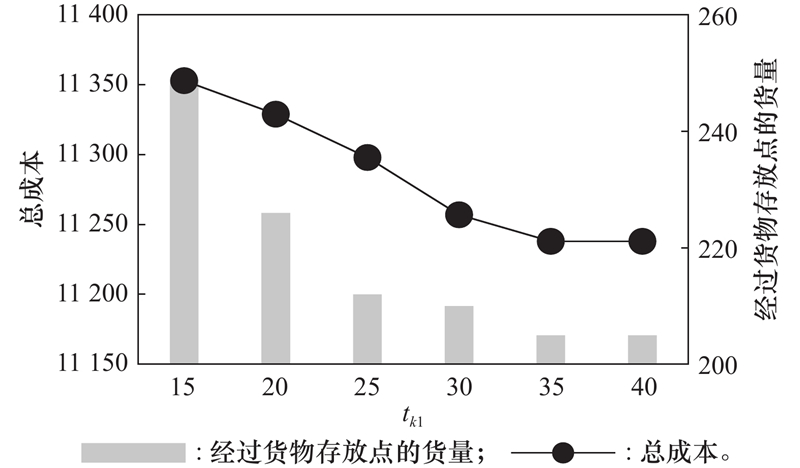
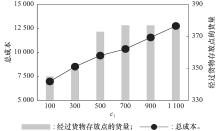
Fig.7
Sensitivity analysis chart about ${c_1}$of C8"
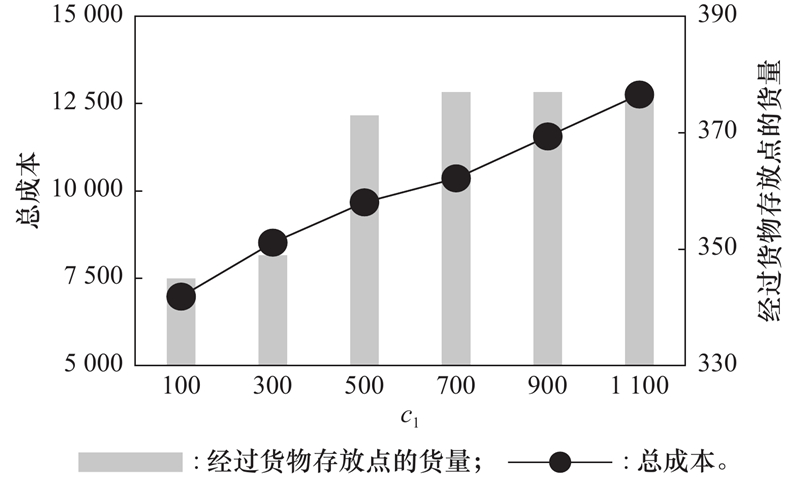
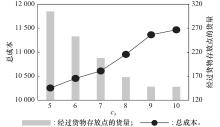
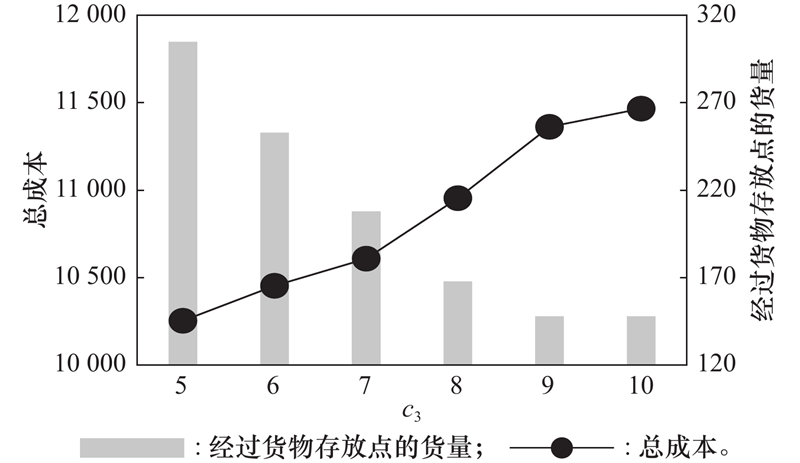
Fig.8
Sensitivity analysis chart about ${c_3}$of B8"
| 1 | HU R, TANG Z Q, LIU F X, et al. Optimization of contactless distribution of medical protective materials during the outbreak of spreading epidemic disease[J]. Chinese Journal of Management Science, 2023, 31 (5): 152- 163. |
| 2 | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30 (6): 1- 197. |
| Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30 (6): 1- 197. | |
| 3 | 徐进, 陈钦, 陈正委, 等. 适应无人驾驶汽车的道路设施设计综述[J]. 西南交通大学学报, 2023, 58 (6): 1366- 1377. |
| XU J, CHEN Q, CHEN Z W, et al. Review of roadway facility design for self-driving cars[J]. Journal of Southwest Jiaotong University, 2023, 58 (6): 1366- 1377. | |
| 4 |
XI H, RAYAN H A. The use of unmanned ground vehicles (mobile robots) and unmanned aerial vehicles (drones) in the civil infrastructure asset management sector: applications, robotic platforms, sensors, and algorithms[J]. Expert Systems with Applications, 2023, 232, 120897.
doi: 10.1016/j.eswa.2023.120897 |
| 5 |
LURII B, ANN M C, JAN F E. A two-tier urban delivery network with robot-based deliveries[J]. Networks, 2021, 78 (4): 461- 483.
doi: 10.1002/net.22024 |
| 6 | PETRICA C P, LEVENTE F, ANDREI H M, et al. A novel two-level optimization approach for clustered vehicle routing problem[J]. Computer & Industrial Engineering, 2018, 115 (1): 304- 318. |
| 7 |
WANG Y, ASSOGBA K, LIU Y, et al. Two-echelon location-routing optimization with time windows based on customer clustering[J]. Expert Systems with Applications, 2018, 104, 244- 260.
doi: 10.1016/j.eswa.2018.03.018 |
| 8 |
DELLAERT N, SARIDARQ D F, WOENSEL V T, et al. Branch-and-price-based algorithms for the two-echelon vehicle routing problem with time windows[J]. Transportation Science, 2019, 53 (2): 319- 622.
doi: 10.1287/trsc.2018.0836 |
| 9 | MANUEL O, ANDREAS H, ALEXANDER H. Cost-optimal truck-and-robot routing for last-mile delivery[J]. Networks, 2023, 79 (3): 364- 389. |
| 10 |
CHENG C, EMRAH D, YUAN H, et al. The adoption of self-driving delivery robots in last mile logistics[J]. Transportation Research Part E: Logistics and Transportation Review, 2021, 146, 102214.
doi: 10.1016/j.tre.2020.102214 |
| 11 |
ANDREAS H, MANUEL O, ALEXANDER H. A mixed truck and robot delivery approach for the daily supply of customers[J]. European Journal of Operational Research, 2022, 303 (1): 401- 421.
doi: 10.1016/j.ejor.2022.02.028 |
| 12 |
SCHERR O Y, SAAVEDRA N A B, HEWITT M, et al. Service network design with mixed autonomous fleets[J]. Transportation Research Part E: Logistics and Transportation Review, 2019, 124, 40- 55.
doi: 10.1016/j.tre.2019.02.001 |
| 13 |
MANUEL O, ANDREAS H, ALEXANDER H. The multi-vehicle truck-and-robot routing problem for last-mile delivery[J]. European Journal of Operational Research, 2023, 310 (2): 680- 697.
doi: 10.1016/j.ejor.2023.03.031 |
| 14 |
YU S H, PUCHINGER J, SUN S D. Electric van-based robot deliveries with en-route charging[J]. European Journal of Operational Research, 2024, 317 (3): 806- 826.
doi: 10.1016/j.ejor.2022.06.056 |
| 15 |
MOKHTARI M A, SALHI A, YANG X, et al. A multi-objective approach for the integrated planning of drone and robot assisted truck operations in last-mile delivery[J]. Expert Systems with Applications, 2025, 269, 126434.
doi: 10.1016/j.eswa.2025.126434 |
| 16 |
MAIO A D, GHIANI G, DEMETRIO L, et al. Sustainable last-mile distribution with autonomous delivery robots and public transportation[J]. Transportation Research Part C: Emerging Technologies, 2024, 163, 104615.
doi: 10.1016/j.trc.2024.104615 |
| 17 |
SIMONI M D, KUTANOGLU E, CLAUDEL C G. Optimization and analysis of a robot-assisted last mile delivery system[J]. Transportation Research Part E: Logistics and Transportation Review, 2020, 142, 102049.
doi: 10.1016/j.tre.2020.102049 |
| 18 | CHEN Y, CHEN M Q, CHEN Z H, et al. Delivery path planning of heterogeneous robot system under road network constraints[J]. Computers & Electrical Engineering, 2021, 92, 107197. |
| 19 |
CHEN C, DEMIR E, HUANG Y. An adaptive large neighborhood search heuristic for the vehicle routing problem with time windows and delivery robots[J]. European Journal of Operational Research, 2021, 294 (3): 1164- 1180.
doi: 10.1016/j.ejor.2021.02.027 |
| 20 |
YU S H, PUCHINGER J, SUN S D. Van-based robot hybrid pickup and delivery routing problem[J]. European Journal of Operational Research, 2022, 298 (3): 894- 914.
doi: 10.1016/j.ejor.2021.06.009 |
| 21 |
DIAO X L, FAN H M, ZHU X Y, et al. Multi-depot routing problem with van-based driverless vehicles[J]. Scientific Reports, 2024, 14, 19807.
doi: 10.1038/s41598-024-70781-0 |
| 22 |
VENKATA S C, SUNDAR K, VENKATACHALAM S, et al. Heuristics for multi-vehicle routing problem considering human-robot interactions[J]. IEEE Trans. on Intelligent Vehicles, 2023, 8 (5): 3228- 3238.
doi: 10.1109/TIV.2023.3261274 |
| 23 |
JENNINGS D, FIGLIOZZI M. Study of sidewalk autonomous delivery robots and their potential impacts on freight efficiency and travel[J]. Transportation Research Record, 2019, 2673 (6): 317- 326.
doi: 10.1177/0361198119849398 |
| 24 |
ALFANDARI L, LJUBI I, SILVA M D. A tailored Benders decomposition approach for last-mile delivery with autonomous robots[J]. European Journal of Operational Research, 2022, 299 (2): 510- 525.
doi: 10.1016/j.ejor.2021.06.048 |
| 25 |
LIU D, DENG Z H, MAO X H, et al. Two-echelon vehicle-routing problem: Optimization of autonomous delivery vehicle-assisted E-grocery distribution[J]. IEEE Access, 2020, 8, 108705- 108719.
doi: 10.1109/ACCESS.2020.3001753 |
| 26 | JINGI A M, YANG X. Robot-assisted delivery problems and their exact solutions[C]//Proc. of the International Conference on Optimization and Learning, 2023: 341−353. |
| 27 | 雷勤, 高颜兵, 周煜丰, 等. 基于改进ALNS算法的多交付选项路径规划[J]. 系统工程与电子技术, 2025, 47 (1): 173- 181. |
| LEI Q, GAO Y B, ZHOU Y F, et al. Multi-delivery option path planning based on improved ALNS algorithm[J]. Systems Engineering and Electronics, 2025, 47 (1): 173- 181. | |
| 28 | 唐开强, 傅汇乔, 刘佳生, 等. 基于深度强化学习的带约束车辆路径分层优化研究[J]. 系统工程与电子技术, 2025, 47 (3): 827- 841. |
| TANG K Q, FU H Q, LIU J S, et al. Hierarchical optimization research of constrained vehicle routing based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2025, 47 (3): 827- 841. | |
| 29 |
NILS B, STEFAN S, FELIX W. Scheduling last-mile deliveries with truck-based autonomous robots[J]. European Journal of Operation Research, 2018, 271 (3): 1085- 1099.
doi: 10.1016/j.ejor.2018.05.058 |
| 30 |
YU S H, PUCHINGER J, SUN S. Two-echelon urban deliveries using autonomous vehicles[J]. Transportation Research Part E: Logistics and Transportation Review, 2020, 141, 102018.
doi: 10.1016/j.tre.2020.102018 |
| 31 |
PHILIPPE G, MICHEL G, FABIEN L, et al. An adaptive large neighborhood search for the two-echelon multiple-trip vehicle routing problem with satellite synchronization[J]. European Journal of Operation Research, 2016, 254 (1): 80- 91.
doi: 10.1016/j.ejor.2016.03.040 |
| 1 | 胡卉, 唐子淇, 刘富鑫, 等. 疫情下医用防护物资“无接触”配送优化[J]. 中国管理科学, 2023, 31 (5): 152- 163. |
| 32 |
ALEXANDRA A, VERA C H, PAMELA C N. Synchronizing vans and cargo bikes in a city distribution network[J]. Central European Journal of Operations Research, 2017, 25 (2): 345- 376.
doi: 10.1007/s10100-016-0441-z |
| 33 | SUTRISNO H, YANG C L. A two-echelon location routing problem with mobile satellites for last-mile delivery: mathematical formulation and clustering-based heuristic method[J]. Annals of Operations Research, 2023, 323 (1): 203- 228. |
| 34 |
ZUO X R, XIAO Y Y, YOU M, et al. A new formulation of the electric vehicle routing problem with time windows considering concave nonlinear charging function[J]. Journal of Cleaner Production, 2019, 236, 117687.
doi: 10.1016/j.jclepro.2019.117687 |
| 35 | 刁小龙. 基于存储点联合调度的社区无人车配送问题研究[J]. 系统仿真学报, 2025, 37 (1): 284- 298. |
| DIAO X L. Driverless vehicles distribution problem in communities in cooperation of storage points[J]. Journal of System Simulation, 2025, 37 (1): 284- 298. | |
| 36 | 骆承钦, 胡志庠, 靳全勤. 线性代数[M]. 6版. 上海: 高等教育出版社, 2014. |
| LUO C Q, HU Z X, JIN Q Q. Linear algebra[M]. 6th ed. Shanghai: Higher Education Press, 2014. |
| [1] | FANG Wei, ZHANG Lingzhi. Learning of fuzzy cognitive maps using multi-objective evolutionary algorithm [J]. Systems Engineering and Electronics, 2018, 40(2): 447-455. |
| [2] | WANG Xing-yuan, ZHANG Peng. Improved particle swarm optimization based on precise bionic metaphor [J]. Journal of Systems Engineering and Electronics, 2012, 34(7): 1484-1492. |
| [3] | BI Xiao-jun, WANG Yan-jiao. Niche artificial bee colony algorithm for multi-peak function optimization [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2564-2568. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||