Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (9): 2971-2984.doi: 10.12305/j.issn.1001-506X.2025.09.18
• Systems Engineering • Previous Articles
Stealthy paths planning algorithm for UAV swarm in multiple-threat environment
Wen WEN, Chenguang SHI( ), Jianjiang ZHOU
), Jianjiang ZHOU
- Key Laboratory of Radar Imaging and Microwave Photonics,Ministry of Education,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China
-
Received:2024-01-02Online:2025-09-25Published:2025-09-16 -
Contact:Chenguang SHI E-mail:scg_space@163.com
CLC Number:
Cite this article
Wen WEN, Chenguang SHI, Jianjiang ZHOU. Stealthy paths planning algorithm for UAV swarm in multiple-threat environment[J]. Systems Engineering and Electronics, 2025, 47(9): 2971-2984.
share this article
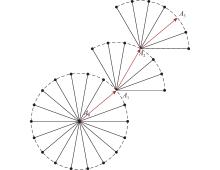
Fig.1
Unmanned aerial vehicle expands search process"
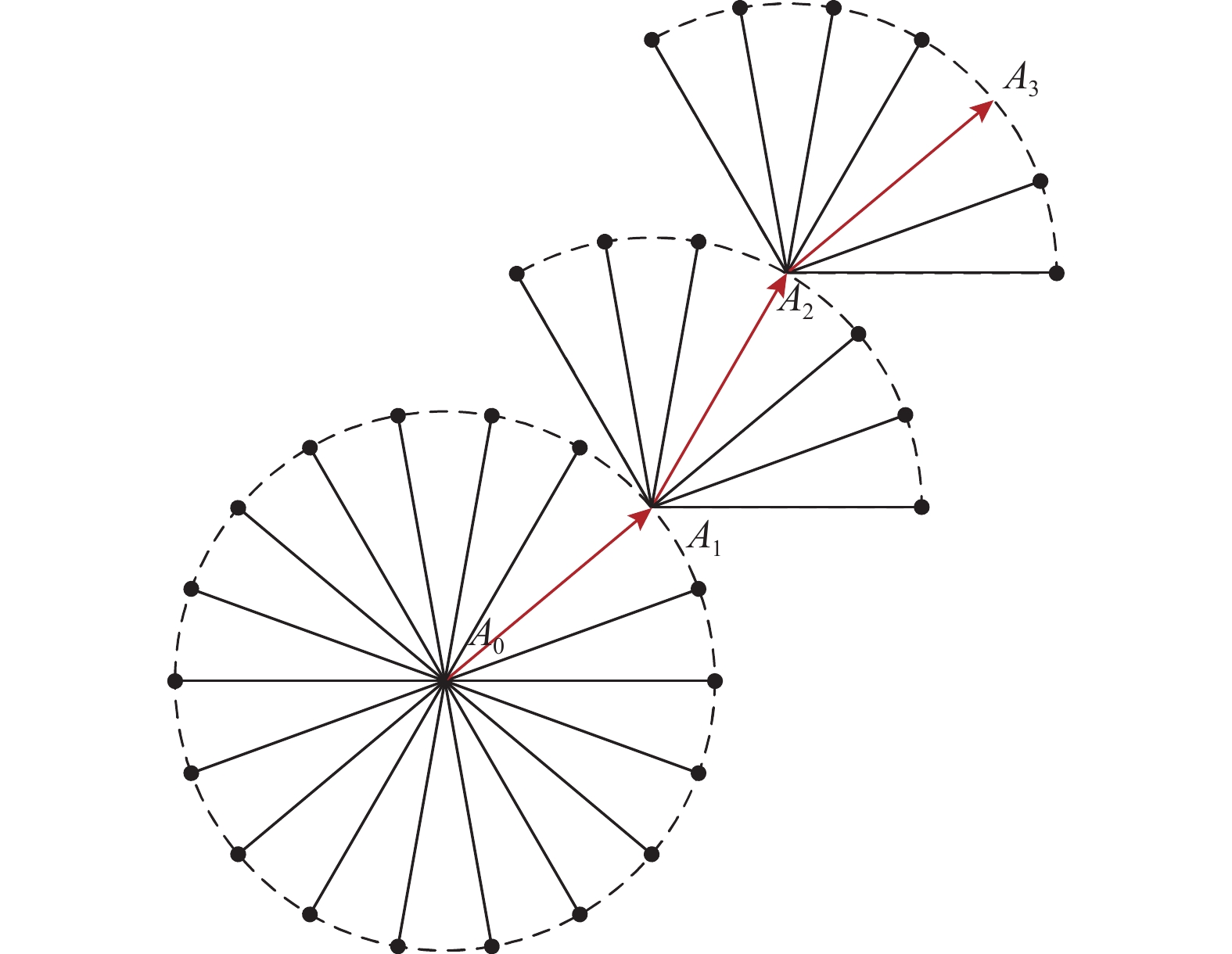
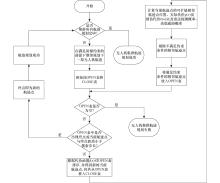
Fig.2
Flowchart of stealthy paths planning algorithm for unmanned aerial vehicle swarms"
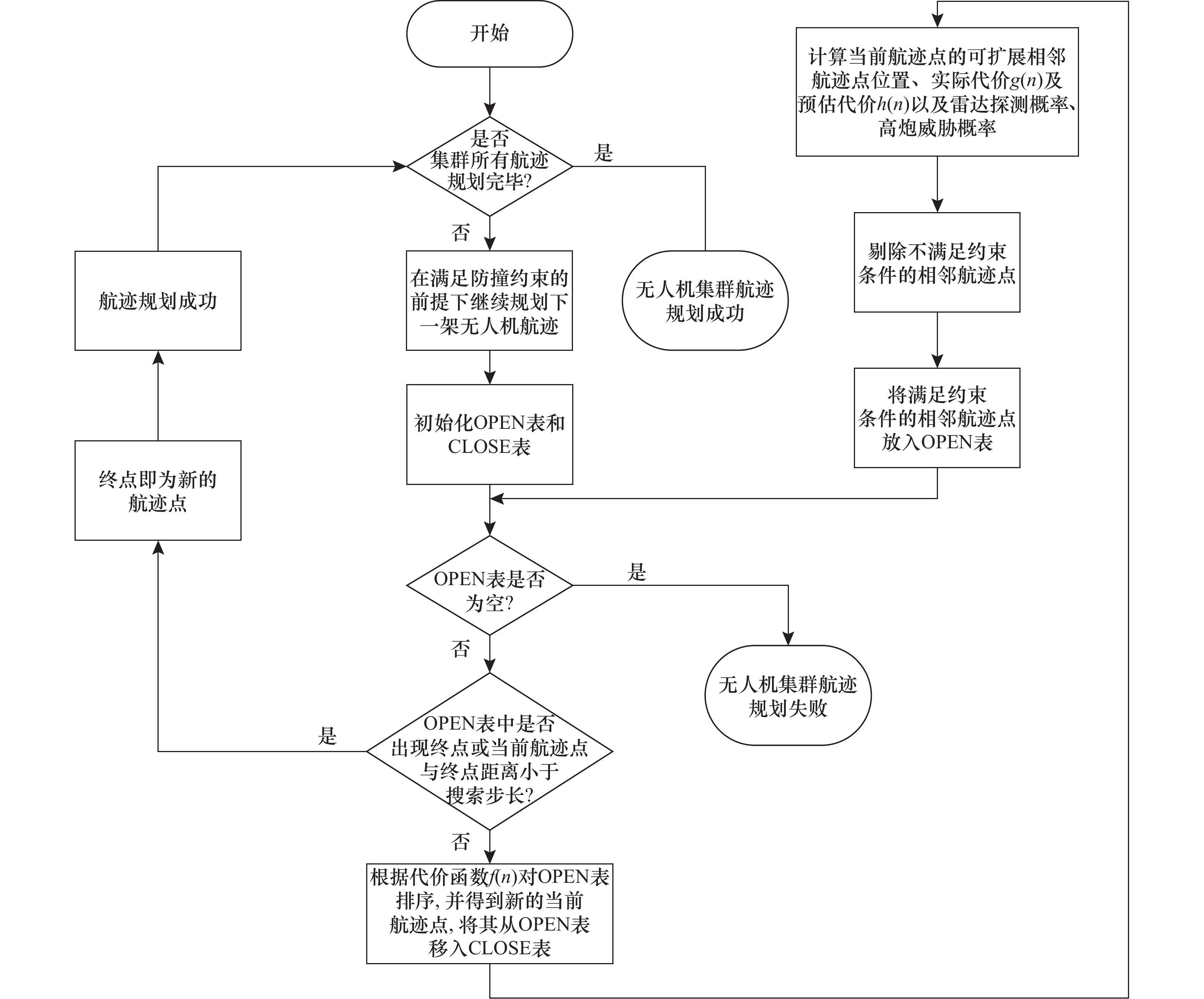
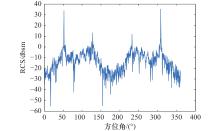
Fig.3
Unmanned aerial vehicle RCS distribution"
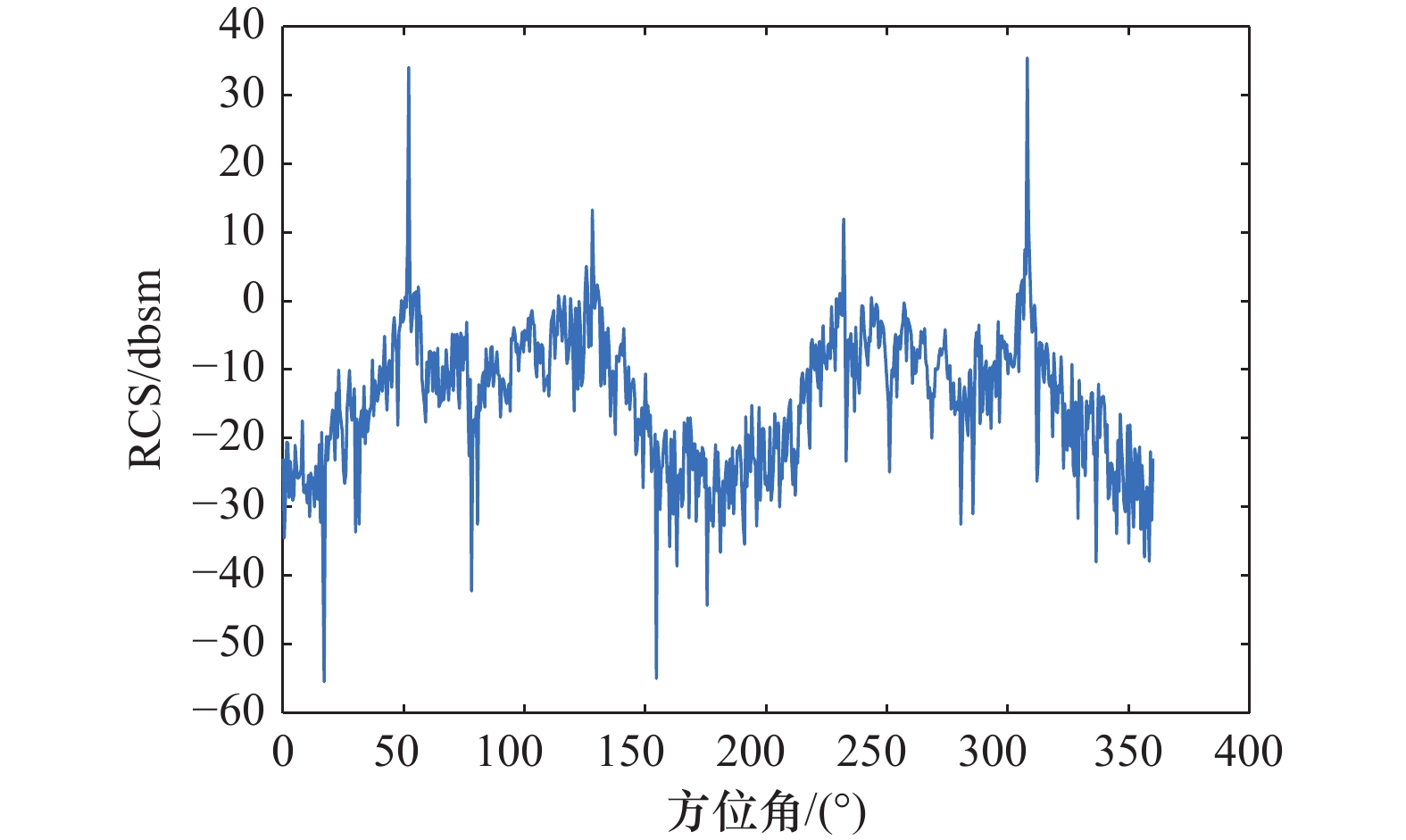
Table 1
Unmanned aerial vehicle start and end point setup"
| 无人机编号 | 起点/km | 终点/km |
| 无人机1 | (5,18) | (70,85) |
| 无人机2 | (10,15) | (78,55) |
| 无人机3 | (5,25) | (90,77) |
| 无人机4 | (5,35) | (50,95) |
| 无人机5 | (20,10) | (89,40) |
| 无人机6 | (5,40) | (40,70) |
| 无人机7 | (25,5) | (95,70) |
| 无人机8 | (50,5) | (25,85) |
| 无人机9 | (70,15) | (5,60) |
| 无人机10 | (75,20) | (5,85) |
Table 2
Radars start and end point setup km"
| 雷达编号 | 位置 |
| 雷达1 | (50,50) |
| 雷达2 | (25,50) |
| 雷达3 | (50,25) |
| 雷达4 | (25,25) |
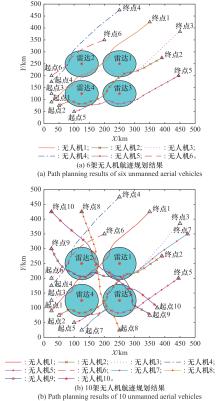
Fig.4
Results of unmanned aerial vehicle swarm path planning in scene 1"
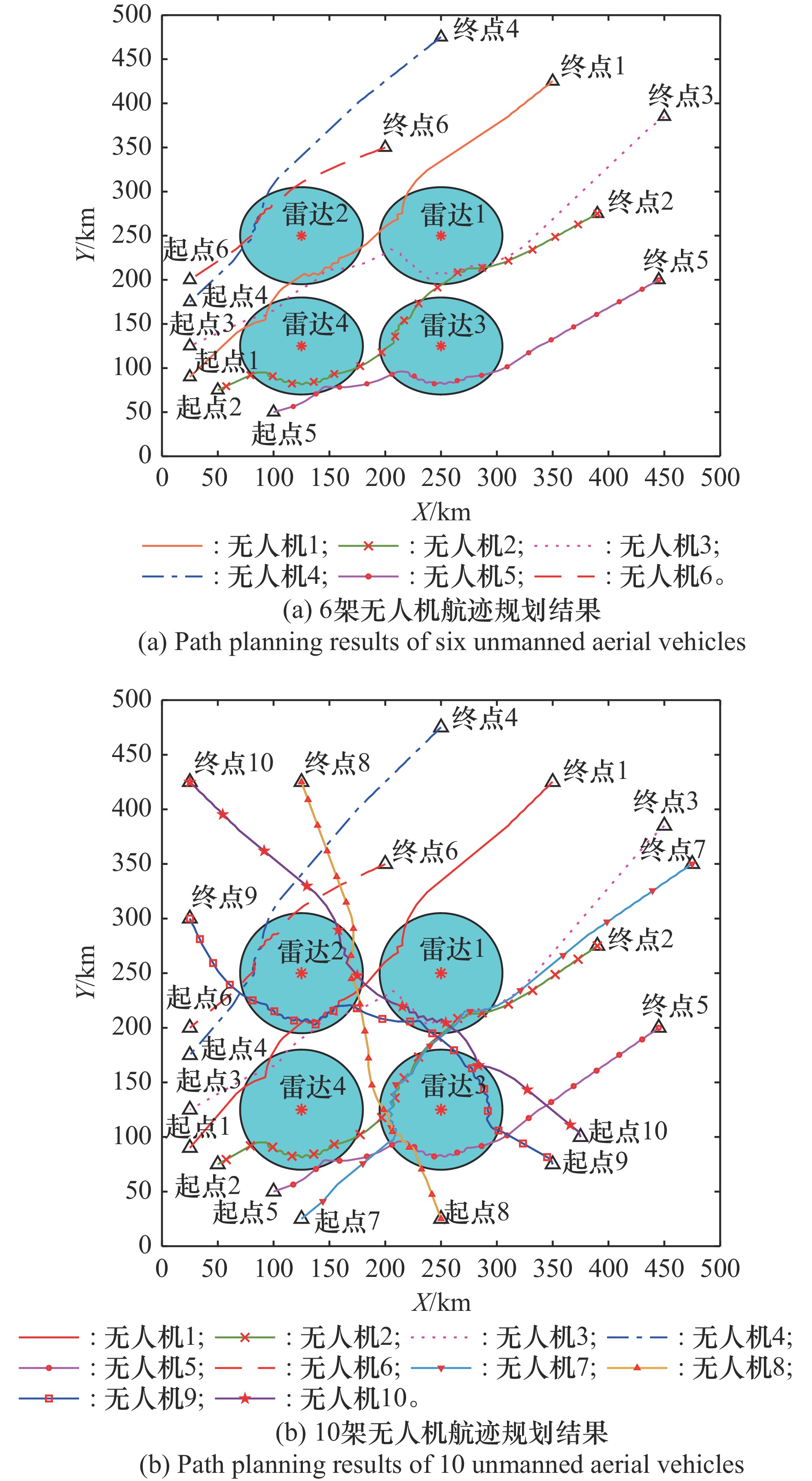

Fig.5
Heading angle change of six unmanned aerial vehicles in scene 1"

Fig.6
Heading angle change of 10 unmanned aerial vehicles in scene 1"


Fig.7
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths in scene 1"

Fig.8
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths with scene 1 for comparison algorithm"
Table 3
Performance comparison of different algorithms for six unmanned aerial vehicles in scene 1"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 78.16 | 7.74 | |
| 对比算法 | 108.73 | 9.31 |
Table 4
Performance comparison of different algorithms for 10 unmanned aerial vehicles in scene 1"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 143.26 | 21.88 | |
| 对比算法 | 191.86 | 24.54 |
Table 5
Range of fixed obstacles km"
| 固定障碍物编号 | 顶点1 | 顶点2 | 顶点3 | 顶点4 |
| 1 | (75,60) | (89,60) | (75,73) | (89,73) |
| 2 | (74,35) | (85,35) | (74,46) | (85,46) |
| 3 | (49,70) | (60,70) | (49,81) | (60,81) |

Fig.9
Results of unmanned aerial vehicles swarm path planning in scene 2"


Fig.10
Heading angle change of six unmanned aerial vehicles in scene 2"

Fig.11
Change of heading angle of 10 unmanned aerial vehicles in scene 2"
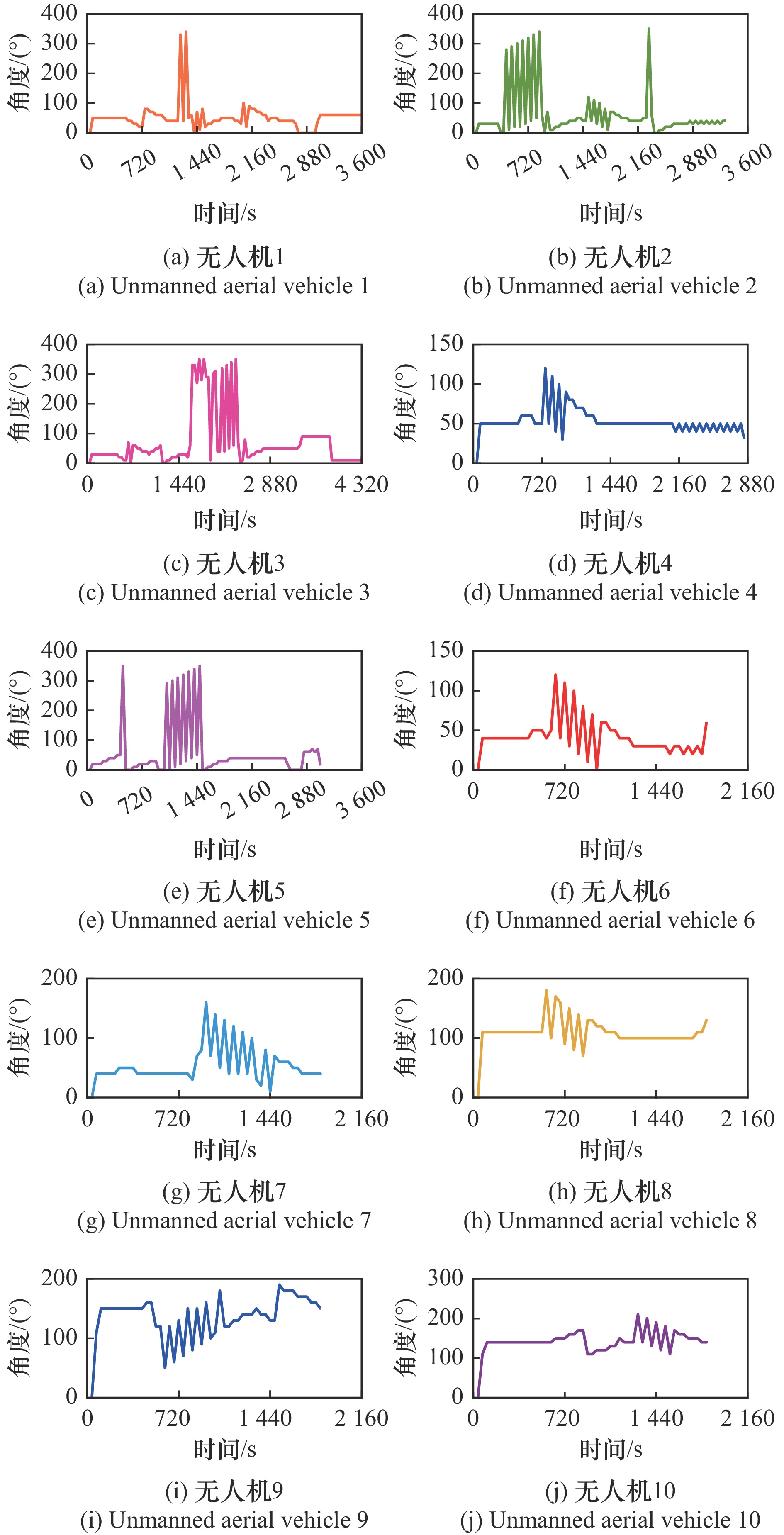
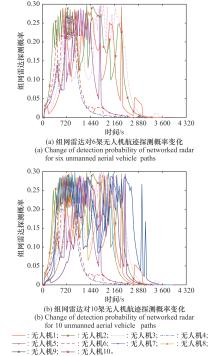
Fig.12
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths in scene 2"
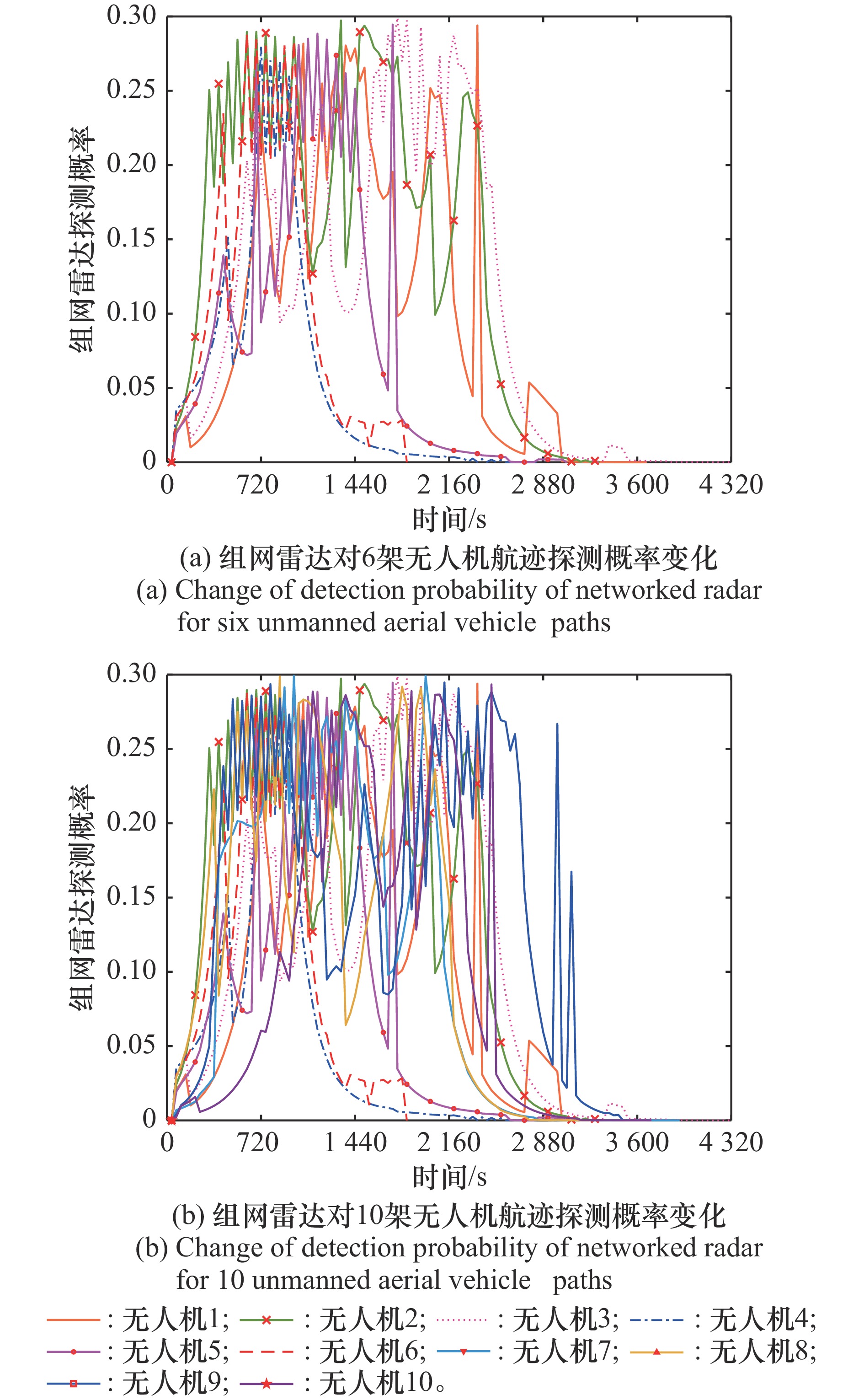

Fig.13
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths in scene 2 for comparison algorithm"

Table 6
Performance comparison of different algorithms for six unmanned aerial vehicle in scene 2"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 2 630 | 79.12 | 9.15 |
| 对比算法 | 2 587 | 113.91 | 16.02 |
Table 7
Performance comparison of different algorithms for 10 unmanned aerial vehicle in scene 2"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 4 605 | 145.59 | 25.24 |
| 对比算法 | 4 520 | 206.16 | 41.42 |
Table 8
Scene 3 antiaircraft gun parameters setting km"
| 威胁名称 | 最大威胁距离 | 最小威胁距离 | 高射炮位置 |
| 高射炮 | 60 | 20 | (50,80) |

Fig.14
Results of unmanned aerial vehicle swarm path planning in scene 3"
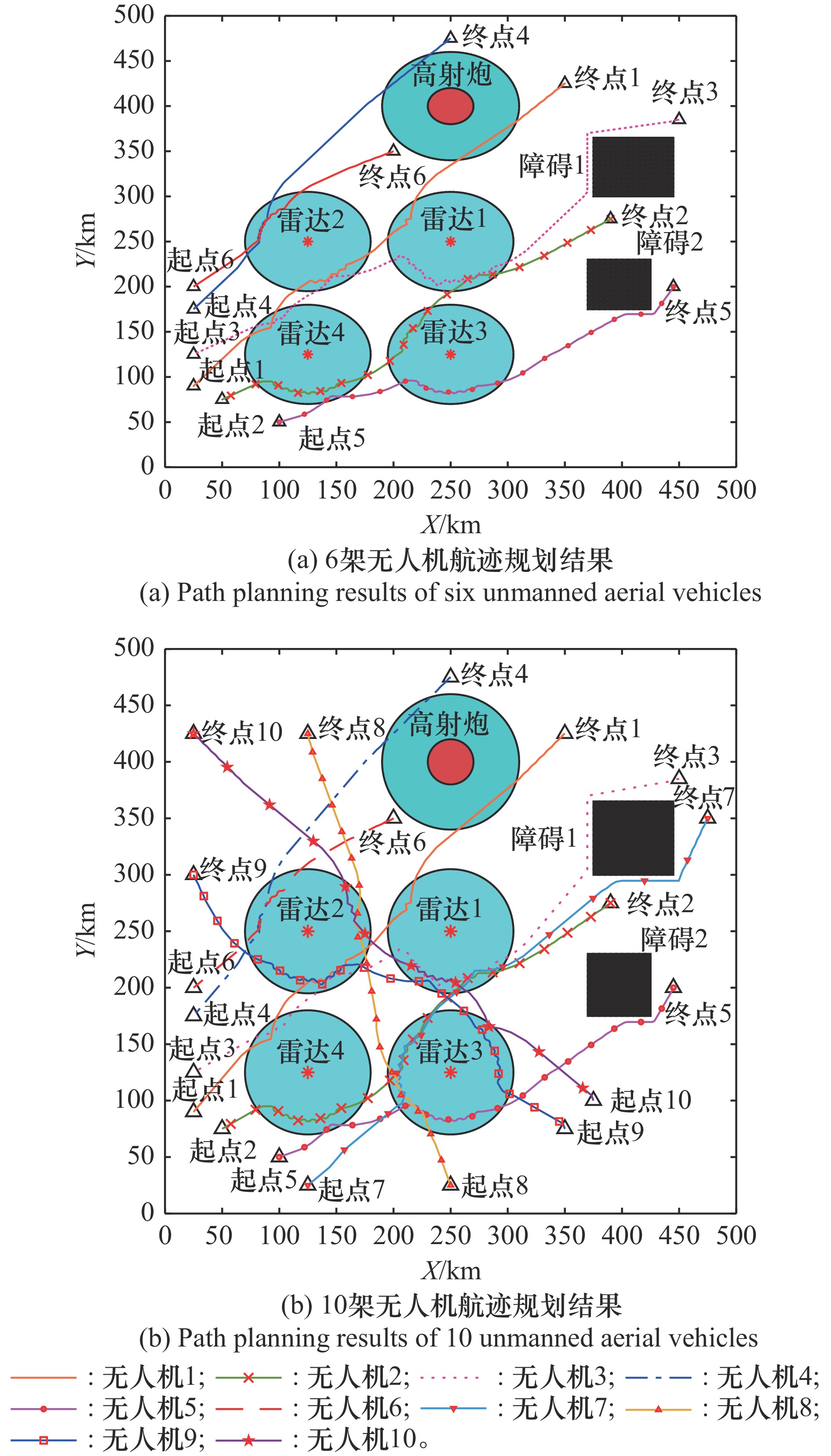

Fig.15
Heading angle change of six unmanned aerial vehicles in scene 3"

Fig.16
Heading angle change of 10 unmanned aerial vehicles in scene 3"

Fig.17
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths in scene 3"

Fig.18
Change of detection probability of networked radar for unmanned aerial vehicle swarm paths in scene 3 for comparison algorithm"
Table 9
Performance comparison of different algorithms for six unmanned aerial vehicles in scene 3"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 2 620 | 73.91 | 9.7 |
| 对比算法 | 2 575 | 104.62 | 12.9 |
Table 10
Performance comparison of different algorithms for 10 unmanned aerial vehicles in scene 3"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 4 595 | 134.73 | 17.90 |
| 对比算法 | 4 511 | 228.05 | 20.97 |
| 1 | 刘伯健, 李爱军, 郭永, 等. 带有输入受限的无人机精确编队合围容错控制[J]. 航空学报, 2023, 44 (9): 327414. |
| LIU B J, LI A J, GUO Y, et al. Fault-tolerant containment control for precise formation of UAVs with input saturation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (9): 327414. | |
| 2 | GUPTA A, SRIVASTAVA S. Comparative analysis of ant colony and particle swarm optimization algorithms for distance optimization[J]. Procedia Computer Science, 2020, (173): 245- 253. |
| 3 | LU Y F, WU A P, CHEN Q Y, et. al. An improved UAV path planning method based on RRT-APF hybrid strategy[C]// Proc. of the 5th International Conference on Automation, Control and Robotics Engineering, 2020: 81−86. |
| 4 |
WANG Q, CHEN H, QIAO L, et al. Path planning for UAV/UGV collaborative systems in intelligent manufacturing[J]. IET Intelligent Transport Systems, 2020, 14 (11): 1475- 1483.
doi: 10.1049/iet-its.2019.0688 |
| 5 | JAYAWEERA H M, HANOUN S. A dynamic artificial potential field (D-APF) UAV path planning technique for following ground moving targets[J]. IEEE Access, 2020, (8): 192760- 192776. |
| 6 |
HONG D, LEE S, CHO Y H, et al. Energy-efficient online path planning of multiple drones using reinforcement learning[J]. IEEE Trans. on Vehicular Technology, 2021, 70 (10): 9725- 9740.
doi: 10.1109/TVT.2021.3102589 |
| 7 | CUI Z Y, WANG Y. UAV path planning based on multi-layer reinforcement learning technique[J]. IEEE Access, 2021, 9, 59486- 59497. |
| 8 |
JAMSHIDI V, NEKOUKAR V, REFANM H. Real time UAV path planning by parallel grey wolf optimization with align coefficient on CAN bus[J]. Cluster Computing, 2021, 24 (3): 2495- 2509.
doi: 10.1007/s10586-021-03276-6 |
| 9 | QI B K, LI M, YANG Y, et al. Research on UAV path planning obstacle avoidance algorithm based on improved artificial potential field method[J]. Journal of Physics: Conference Series, 2021, 1948, 012060. |
| 10 |
BAI H, FAN T, NIU Y, et al. Multi-UAV cooperative trajectory planning based on many-objective evolutionary algorithm[J]. Complex System Modeling and Simulation, 2022, 2 (2): 130- 141.
doi: 10.23919/CSMS.2022.0006 |
| 11 | PAN Z H, ZHANG C X, XIA Y Q, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems[J]. IEEE Trans. on Circuits and Systems,, 2022, 69 (3): 1129- 1133. |
| 12 | RAGAB M, ALTALBE A, ALGHAMDI A S M, et al. A drones optimal path planning based on swarm intelligence algorithms[J]. Computers, Materials & Continua, 2022, 72(1): 365−380. |
| 13 | YU X B, LUO W G. Reinforcement learning-based multi-strategy cuckoo search algorithm for 3D UAV path planning[J]. Expert Systems with Application, 2023, 223 (8): 119910. |
| 14 | ZHU R X, HOU T G, GUO Y X, et al. Improved multi-strategy salp swarm algorithm for UAV path planning[C]// Proc. of the IEEE International Conference on Unmanned Systems, 2023: 1601−1606. |
| 15 | ZHAO Z, NIU Y F, MA Z W, et al. A fast stealth trajectory planning algorithm for stealth UAV to fly in multi-radar network[C]// Proc. of the IEEE International Conference on Real-time Computing and Robotics, 2016: 549−554. |
| 16 | YANG R, MA Y, TAO Z Z, et al. A stealthy route planning algorithm for the fourth generation fighters[C]// Proc. of the International Conference on Mechanical, System and Control Engineering, 2017: 323−327. |
| 17 | CAO Y, LONG T, WANG Z, et al. Aircraft route planning for stealth penetration based on sparse A* search[C]// Proc. of the 29th Chinese Control and Decision Conference, 2017: 5380−5385. |
| 18 | BORGES N P, GHEDINI C G, RIBEIRO C H C. SUN-stealth UAV networks: a cooperative local model to mitigate UAVs exposure to threats[C]// Proc. of the IEEE International Conference on Systems, Man and Cybernetics, 2019: 4316−4323. |
| 19 |
ZHANG Z, WU J, DAI J Y, et al. A novel real-time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment[J]. IEEE Access, 2020, 8, 122757- 122771.
doi: 10.1109/ACCESS.2020.3007496 |
| 20 | ORHAN E H. A path planning method for a low observable UAV in radar field[C]// Proc. of the International Conference on Unmanned Aircraft Systems, 2020: 41−47. |
| 21 | ZHANG Z T, TANG C R, LI Y B. Penetration path planning of stealthy UAV based on improved sparse A-star algorithm[C]// Proc. of the IEEE 3rd International Conference on Electronic Information and Communication Technology, 2020: 388−392. |
| 22 | ZHANG Z, WU J, DAI J Y, et al. Rapid penetration path planning method for stealth UAV in complex environment with BB threats[J]. International Journal of Aerospace Engineering, 2020, 2020 |
| 23 | WANG Y, LI M H, YANG J, et al. Research on stealth route planning based on improved RRT algorithm[C]// Proc. of the 5th International Conference on Mechanical, Control and Computer Engineering, 2020: 1491−1495. |
| 24 |
ZHANG Z, WU J, DAI J Y, et al. Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2022, 236 (1): 72- 81.
doi: 10.1177/09544100211007381 |
| 25 |
SAEED R A, MOHAMED O, ABDEL-KHALEK S. Optimal path planning for drones based on swarm intelligence Algorithm[J]. Neural Computing and Applications, 2022, 34, 10133- 10155.
doi: 10.1007/s00521-022-06998-9 |
| 26 | LI W K, LI C, HU J. Research on stealthy UAV path planning based on improved genetic algorithm[C]// Proc. of the International Conference on Artificial Intelligence and Computer Information Technology, 2022. |
| 27 | WANG Z Y, HUANG J, YI M X. A stealth–distance dynamic weight deep Q-Network algorithm for three-dimensional path planning of unmanned aerial helicopter[J]. Aerospace, 2023, 10 (8): 709. |
| 28 |
ZHANG Z, JIANG J, WU J, et al. Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified A-Star algorithm[J]. ISA Transactions, 2023, 134, 42- 57.
doi: 10.1016/j.isatra.2022.07.032 |
| 29 | 张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41 (7): 323692. |
| ZHANG Z, WU J, DAI J Y, et al. Fast penetration path planning for stealth UAV based on improved A-Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (7): 323692. | |
| 30 |
刘鸿福, 周文宏, 陈少飞. 隐身飞机突防建模及低可探测性轨迹规划[J]. 火力与指挥控制, 2016, 41 (9): 36- 40,45.
doi: 10.3969/j.issn.1002-0640.2016.09.009 |
|
LIU H F, ZHOU W H, CHEN S F. Low observability trajectory planning for stealth aircraft penetrates netted radars[J]. Fire Control & Command Control, 2016, 41 (9): 36- 40,45.
doi: 10.3969/j.issn.1002-0640.2016.09.009 |
|
| 31 | 程振. 基于RCS与最短滞留时间的无人机协同航迹规划[D]. 南京: 南京航空航天大学, 2018. |
| CHENG Z. UAV cooperative path planning based on RCS and shortest residence time[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018. | |
| 32 | 葛超. 无人飞行器隐身突防航迹规划及飞行走廊构建方法研究[D]. 武汉: 华中科技大学, 2022. |
| GE C. Research on intelligent penetration path planning and flight corridor construction method of unmanned aerial vehicle[D]. Wuhan: Huazhong University of Science & Technology, 2022. | |
| 33 | 丁鹭飞, 耿富禄, 陈建春. 雷达原理[M]. 北京: 电子工业出版社, 2020. |
| DING L F, GENG F L, CHEN J C. Radar principle[M]. Beijing: Publishing House of Electronics Industry, 2020. |
| [1] | TAN Yanying, LI Yang, ZHOU Jun, ZHU Xiaoping. Path replanning approach for UAV based on A* algorithm in complex environment [J]. Systems Engineering and Electronics, 2017, 39(6): 1268-1273. |
| [2] | LI Xiao-yang, ZHOU De-yun, FENG Qi. Multiple routes planning for A* algorithm based on hierarchical planning [J]. Systems Engineering and Electronics, 2015, 37(2): 318-322. |
| [3] | SUN Xiao-lei, QI Nai-ming, DONG Cheng, YAO Wei-ran. Cooperative control algorithm of task assignment and path planning for multiple UAVs [J]. Systems Engineering and Electronics, 2015, 37(12): 2772-2776. |
| [4] | LIU Li, YU Cheng-long, WANG Zhu, QI Zhu-chang, LONG Teng. Fast 3D route planning method for small UAV [J]. Systems Engineering and Electronics, 2013, 35(12): 2521-2526. |
| [5] | HUANG Jun, YU Lei, CHEN Zhong-qi, REN Bo, ZHANG Bin. Real-time path planning for optic-guided cruise missiles [J]. Journal of Systems Engineering and Electronics, 2010, 32(4): 799-802. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||