Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (8): 2622-2631.doi: 10.12305/j.issn.1001-506X.2025.08.19
• Systems Engineering • Previous Articles Next Articles
UAV coverage path planning for mountain patrol considering different takeoff and landing nests
Zhao YANG( ), Jinbiao HU, Yan WANG, Hongbiao QI
), Jinbiao HU, Yan WANG, Hongbiao QI
- College of General Aviation and Flight,Nanjing University of Aeronautics and Astronautics,Liyang 213300 China
-
Received:2024-05-28Online:2025-08-31Published:2025-09-04 -
Contact:Zhao YANG E-mail:yangzhao@nuaa.edu.cn
CLC Number:
Cite this article
Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests[J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631.
share this article

Fig.1
Multi-unmanned aerial vehicle mountain inspection CPP"
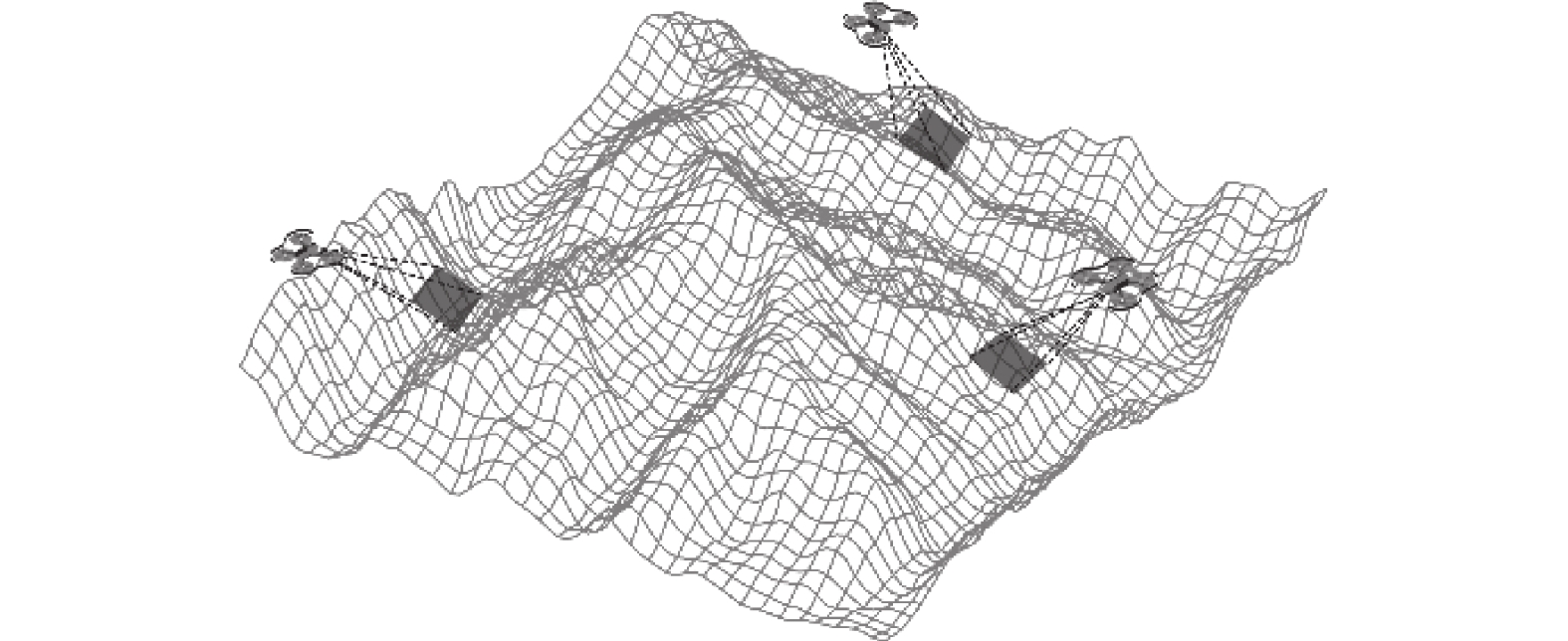

Fig.2
Calculation of flight height"
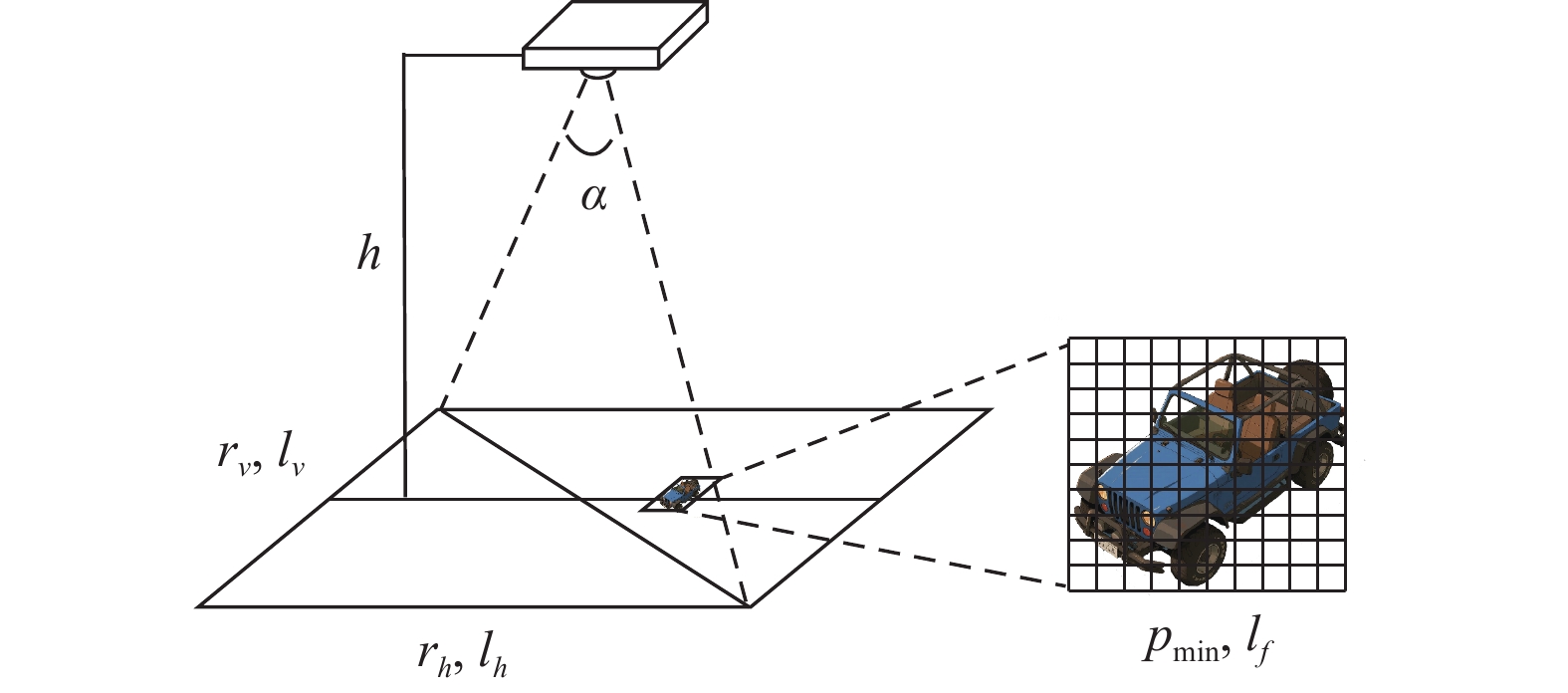

Fig.3
Unmanned aerial vehicle lens direction diagram"
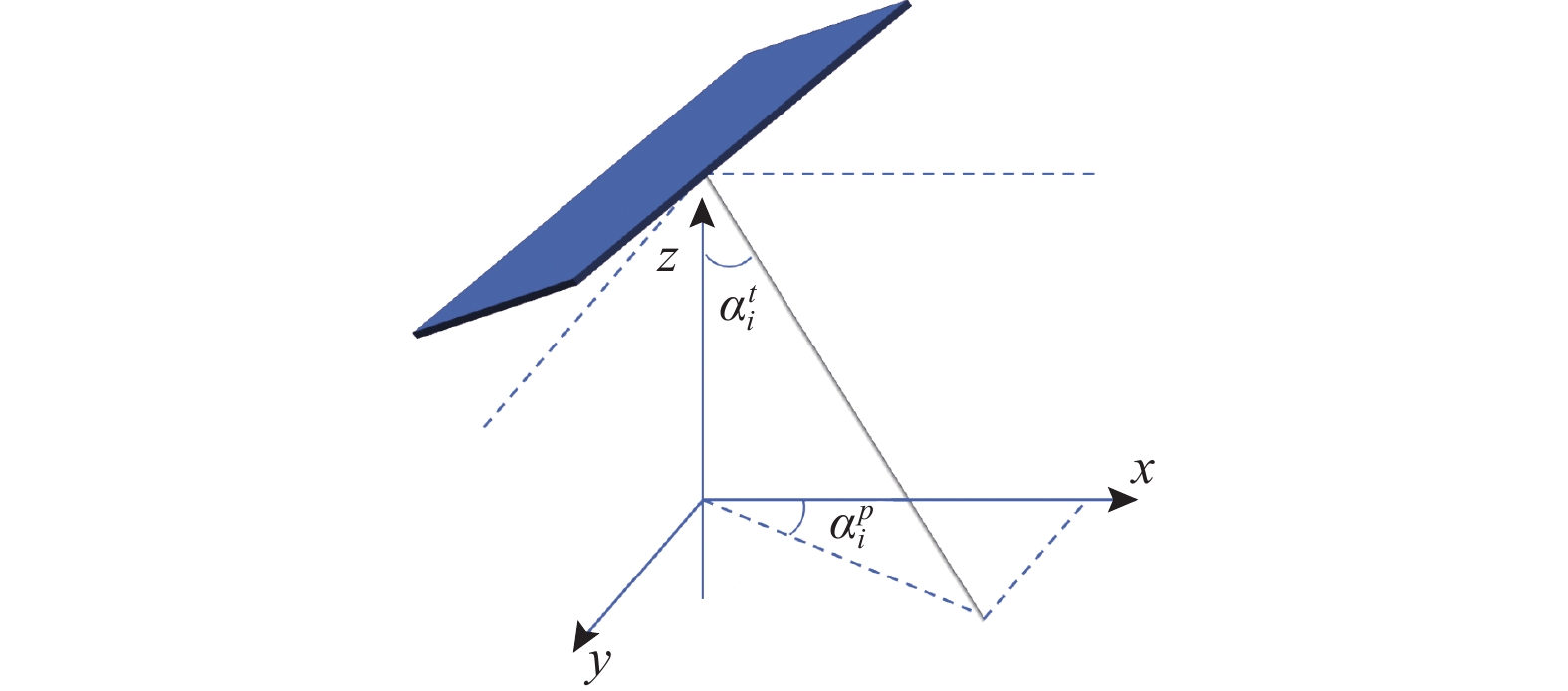
Table 1
Parameter of camera system and performance"
| 参数 | 符号 | 取值 |
| 水平分辨率 | rh | 4 000 |
| 垂直分辨率 | rv | 3 000 |
| 对角视场角/(°) | α | 84 |
| 重量/kg | m | 3.78 |
| 桨叶长度/m | R | 0.20 |
| 电池能量/Wh | EM | 131.6 |
| 最大飞行时间/min | tM | 41 |
| 测试速度/(m/s) | vtest | 10 |
Table 2
Parameter of coverage airpoint generation and energy consumption calculation"
| 参数 | 取值 | 参数 | 取值 | |
| lf /m | 1 | pmin | 32 | |
| o | 0.2 | g/(m/s2) | 9.8 | |
| k1 | 0.855 4 | c2 | 0.317 7 | |
| vv /(m/s) | 3 | vw /(m/s) | −3 | |
| vw /(m/s) | 2 | dw /(°) | 135 | |
| λE | 0.7 | — | — |

Fig.4
Schematic diagram of air waypoints"
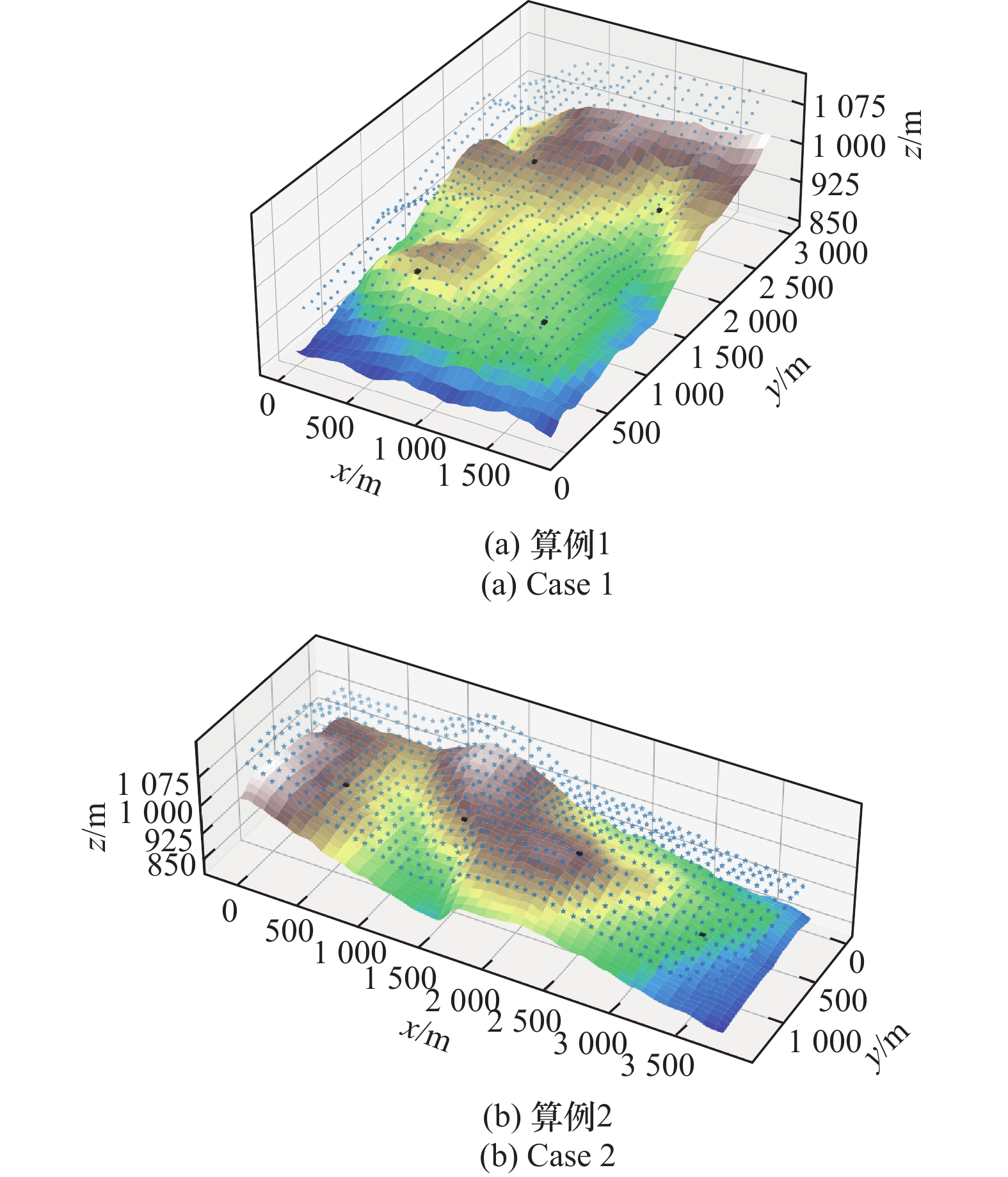
Table 3
Params of each algorithm"
| 算法 | 参数 | 取值 |
| LKH | 运行次数 | 3 |
| NSGA-II | 种群中个体数 | 50 |
| 最大迭代次数 | 1 000 | |
| 遗传算法 | 变异概率 | 0.5 |
| 种群中个体数 | 100 | |
| 最大迭代次数 | 100 |
Table 4
Results of three models of case 1"
| 参数 | 牛耕法 | 同巢起降 | 异巢起降 |
| 总体能耗/kJ | 1 168.87 | 1 156.73 | 1 111.34 |
| 改善率/% | — | 1.04 | 4.75 |
| 单无人机最高能耗/kJ | 302.84 | 301.23 | 293.74 |
| 改善率/% | — | 0.53 | 3.01 |
| 总转弯角/(°) | 8 825.08 | 22 983.88 | 7 498.66 |
| 改善率/% | — | −160.44 | 15.03 |
Table 5
Results of different models of case 2"
| 参数 | 牛耕法 | 同巢起降 | 异巢起降 |
| 总体能耗/kJ | 1 177.19 | 1 141.43 | 1 122.35 |
| 改善率/% | — | 3.04 | 4.66 |
| 单无人机最高能耗/kJ | 302.80 | 290.87 | 283.86 |
| 改善率/% | — | 3.94 | 6.25 |
| 总转弯角/(°) | 11 554.09 | 22 692.66 | 7 471.17 |
| 改善率/% | — | −96.40 | 35.34 |

Fig.5
CPP by the three models of case 1"
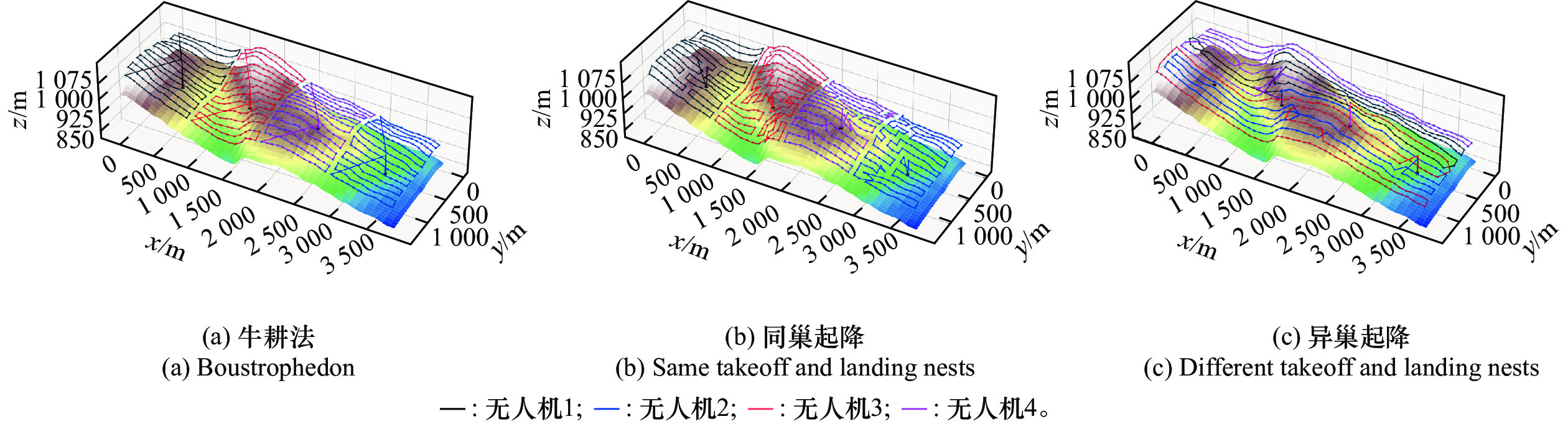
Fig.6
CPP by the three models of case 2"
| 1 | 张世勇, 张雪波, 苑晶, 等. 旋翼无人机环境覆盖与探索规划方法综述[J]. 控制与决策, 2022, 37 (3): 513- 529. |
| ZHANG S Y, ZHANG X B, YUAN J, et al. A survey on coverage and exploration path planning with multi-rotor micro aerial vehicles[J]. Control and Decision, 2022, 37 (3): 513- 529. | |
| 2 |
XU Y Q, LI J M, ZHANG F Q. A UAV-based forest fire patrol path planning strategy[J]. Forests, 2022, 13 (11): 1952.
doi: 10.3390/f13111952 |
| 3 |
CHOSET H. Coverage of known spaces: the boustrophedon cellular decomposition[J]. Autonomous Robots, 2000, 9, 247- 253.
doi: 10.1023/A:1008958800904 |
| 4 |
FEVGAS G, LAGKAS T, ARGYRIOU V, et al. Coverage path planning methods focusing on energy efficient and cooperative strategies for unmanned aerial vehicles[J]. Sensors, 2022, 22 (3): 1235.
doi: 10.3390/s22031235 |
| 5 | HUANG W H. Optimal line-sweep-based decompositions for coverage algorithms[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2001. |
| 6 |
TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55, 441- 451.
doi: 10.1016/j.eswa.2016.02.007 |
| 7 | 薛镇涛, 陈建, 张自超, 等. 基于复杂地块凸划分优化的多无人机覆盖路径规划[J]. 航空学报, 2022, 43 (12): 403- 417. |
| XUE Z T, CHEN J, ZHANG Z C, et al. Multi-UAV coverage path planning based on optimization of convex division of complex plots[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (12): 403- 417. | |
| 8 | 于全友, 徐止政, 段纳, 等. 基于改进ACO的带续航约束无人机全覆盖作业路径规划[J]. 航空学报, 2023, 44 (12): 303- 315. |
| YU Q Y, XU Z Z, DUAN N, et al. Coverage operation path planning of UAV with endurance constraints based on improved ACO[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (12): 303- 315. | |
| 9 |
ZHAO T F, AI C Y, YAO J T, et al. Multi-UAV airborne UV area coverage and task assignment method[J]. Physical Communication, 2024, 62, 102230.
doi: 10.1016/j.phycom.2023.102230 |
| 10 | WAN F, YANG H, MENG Q X. A three-dimensional coverage path planning method for multi-UAV collaboration[C]// Proc. of the 30th International Conference on Geoinformatics, 2023. |
| 11 |
LI D S, WANG X L, SUN T. Energy-optimal coverage path planning on topographic map for environment survey with unmanned aerial vehicles[J]. Electronics Letters, 2016, 52 (9): 699- 701.
doi: 10.1049/el.2015.4551 |
| 12 |
DAI R, FOTEDAR S, RADMANESH M, et al. Quality-aware UAV coverage and path planning in geometrically complex environments[J]. Ad Hoc Networks, 2018, 73, 95- 105.
doi: 10.1016/j.adhoc.2018.02.008 |
| 13 |
WANG H P, ZHANG S Y, ZHANG X Y, et al. Near-optimal 3-D visual coverage for quadrotor unmanned aerial vehicles under photogrammetric constraints[J]. IEEE Trans. on Industrial Electronics, 2022, 69 (2): 1694- 1704.
doi: 10.1109/TIE.2021.3060643 |
| 14 | WANG H P, SONG S Y, GUO Q H, et al. Cooperative motion planning for persistent 3D visual coverage with multiple quadrotor UAVs[J]. IEEE Trans. on Automation Science and Engineering, 2023, 21 (3): 3374- 3383. |
| 15 |
HO W, HO G T S, JI P, et al. A hybrid genetic algorithm for the multi-depot vehicle routing problem[J]. Engineering Applications of Artificial Intelligence, 2008, 21 (4): 548- 557.
doi: 10.1016/j.engappai.2007.06.001 |
| 16 |
WAN F, GUO H X, PAN W W, et al. A mathematical method for solving multi-depot vehicle routing problem[J]. Soft Computing, 2023, 27 (21): 15699- 15717.
doi: 10.1007/s00500-023-08811-8 |
| 17 |
LALLA-RUIZ E, MES M. Mathematical formulations and improvements for the multi-depot open vehicle routing problem[J]. Optimization Letters, 2021, 15 (1): 271- 286.
doi: 10.1007/s11590-020-01594-z |
| 18 |
SUN W C, LUO Z H, HUANG K H, et al. Joint deployment and coverage path planning for capsule airports with multiple drones[J]. Drones, 2023, 7 (7): 457.
doi: 10.3390/drones7070457 |
| 19 |
STODOLA P, KUTEJ L. Multi-depot vehicle routing problem with drones: mathematical formulation, solution algorithm and experiments[J]. Expert Systems with Applications, 2024, 241, 122483.
doi: 10.1016/j.eswa.2023.122483 |
| 20 | LIN Y, WANG T Y, WANG S W. Trajectory planning for multi-UAV assisted wireless networks in post-disaster scenario[C]// Proc. of the IEEE Global Communications Conference, 2019. |
| 21 |
LI X H, LI P F, ZHAO Y, et al. A hybrid large neighborhood search algorithm for solving the multi depot UAV swarm routing problem[J]. IEEE Access, 2021, 9, 104115- 104126.
doi: 10.1109/ACCESS.2021.3098863 |
| 22 |
CAO Y, WEI W Y, BAI Y, et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster Computing, 2019, 22 (S3): 5175- 5184.
doi: 10.1007/s10586-017-1132-9 |
| 23 | LIU Z L, SENGUPTA R, KURZHANSKIY A. A power consumption model for multi-rotor small unmanned aircraft systems[C]// Proc. of the International Conference on Unmanned Aircraft Systems, 2017: 310–315. |
| 24 |
RAJ R, MURRAY C. The multiple flying sidekicks traveling salesman problem with variable drone speeds[J]. Transportation Research Part C: Emerging Technologies, 2020, 120, 102813.
doi: 10.1016/j.trc.2020.102813 |
| 25 |
MILLER C E, TUCKER A W, ZEMLIN R A. Integer programming formulation of traveling salesman problems[J]. Journal of the ACM, 1960, 7 (4): 326- 329.
doi: 10.1145/321043.321046 |
| 26 |
HELSGAUN K. General k-opt submoves for the Lin–Kernighan TSP heuristic[J]. Mathematical Programming Computation, 2009, 1, 119- 163.
doi: 10.1007/s12532-009-0004-6 |
| 27 |
ZHENG J Z, HE K, ZHOU J R, et al. Reinforced Lin–Kernighan–Helsgaun algorithms for the traveling salesman problems[J]. Knowledge-Based Systems, 2023, 260, 110144.
doi: 10.1016/j.knosys.2022.110144 |
| 28 |
SRINIVAS N, DEB K. Muiltiobjective optimization using nondominated sorting in genetic algorithms[J]. Evolutionary Computation, 1994, 2 (3): 221- 248.
doi: 10.1162/evco.1994.2.3.221 |
| 29 | 中国科学院计算机网络信息中心. 地理空间数据云[EB/OL]. [2024-04-28]. https://www.gscloud. cn/. |
| Chinese Computer Network Information Center. Geo spatial Data Cloud[EB/OL]. [2024-04-28]. https://www.gscloud.cn/. | |
| 30 | 大疆行业应用. 经纬 M30 系列_技术参数 [EB/OL]. [2024-04-28]. https://enterprise.dji.com/cn/matrice-30/specs. |
| DJI Enterprise. Martice M30 Series_Specs [EB/OL]. [2024-04-28]. https://enterprise.dji.com/cn/matrice-30/specs. | |
| 31 |
XIAO Z, WAN F, LEI G B, et al. FL-YOLOv7: a lightweight small object detection algorithm in forest fire detection[J]. Forests, 2023, 14 (9): 1812.
doi: 10.3390/f14091812 |
| [1] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Attack-defense confrontation strategy of multi-UAV based on APIQ algorithm [J]. Systems Engineering and Electronics, 2025, 47(7): 2205-2215. |
| [2] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879. |
| [3] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [4] | Jiahui ZHANG, Zhijun MENG, Jiazheng HE, Zichen WANG, Youshen LIN. Multi-UAV air combat target allocation based on improved energy valley optimization [J]. Systems Engineering and Electronics, 2024, 46(11): 3754-3763. |
| [5] | Jianfeng WANG, Gaowei JIA, Zheng GUO, Zhongxi HOU. Review of research on multi-UAV collaborative mission planning method [J]. Systems Engineering and Electronics, 2024, 46(10): 3437-3450. |
| [6] | Daqian LIU, Weidong BAO, Bowen FEI, Xiaomin ZHU. Research on multi-UAV cooperative target search method under unknown urban environment [J]. Systems Engineering and Electronics, 2023, 45(12): 3896-3907. |
| [7] | Jingyu WU, Shiqiang ZHU, Wei SONG, Haolei SHI, Zenan WU. Coverage path planning based on improved cellular decomposition [J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957. |
| [8] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [9] | GAO Chunqing, KOU Yingxin, LI Zhanwu, XU An, LI You, CHANG Yizhe. Cooperative coverage path planning for small UAVs [J]. Systems Engineering and Electronics, 2019, 41(6): 1294-1299. |
| [10] | LIN Juncan, JIA Gaowei, HOU Zhongxi. Research on task assignment of heterogeneous UAV formation in the anti-radar combat [J]. Systems Engineering and Electronics, 2018, 40(9): 1986-1992. |
| [11] | HAN Wei, SU Xi-chao, CHEN Jun-feng. Integrated maintenance support scheduling method of multi carrier aircrafts [J]. Systems Engineering and Electronics, 2015, 37(4): 809-816. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||