Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (3): 951-960.doi: 10.12305/j.issn.1001-506X.2025.03.27
• Guidance, Navigation and Control • Previous Articles
Robust model predictive control for trajectory tracking with exclusion constraint
Haidi SUN, Li DAI, Peizhan WANG, Yuanqing XIA
- School of Automation, Beijing Institute of Technology, Beijing 100081, China
-
Received:2024-05-22Online:2025-03-28Published:2025-04-18 -
Contact:Li DAI
CLC Number:
Cite this article
Haidi SUN, Li DAI, Peizhan WANG, Yuanqing XIA. Robust model predictive control for trajectory tracking with exclusion constraint[J]. Systems Engineering and Electronics, 2025, 47(3): 951-960.
share this article
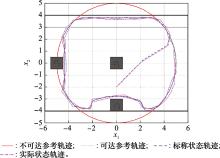
Fig.1
Closed-loop tracking and obstacle avoidance process of unreachable trajectory under the control of algorithm 1"

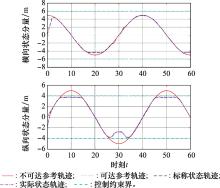
Fig.2
Closed-loop state component varies with time under the control of algorithm 1"


Fig.3
Closed-loop control component varies with time under the control of algorithm 1"


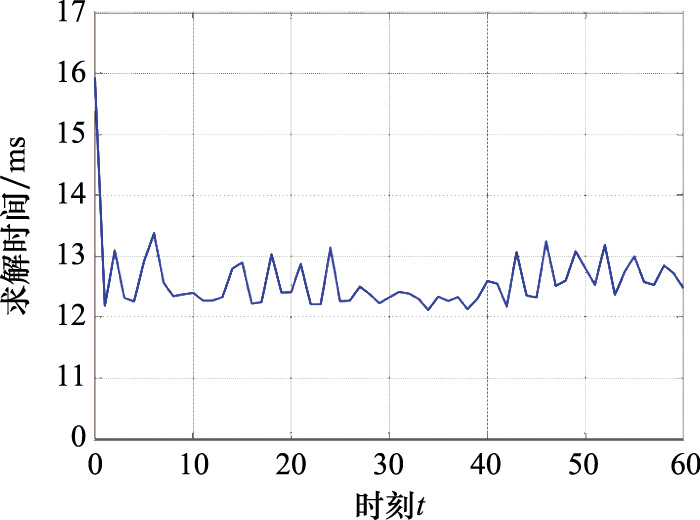
Fig.4
Online solution time of closed-loop tracking obstacle avoidance optimization problem under the control of algorithm 1"
| 1 | RAKOVIĆSV,LEVINEW S.Handbook of model predictive control[M].Cham:Birkhauser, Springer,2018. |
| 2 | RAWLINGSJ B,MAYNED Q.Model predictive control: theory and design[M].Madison:Nob Hill Publishing,2009. |
| 3 |
MAYNED Q.Model predictive control: recent developments and future promise[J].Automatica,2014,50(12):2967-2986.
doi: 10.1016/j.automatica.2014.10.128 |
| 4 |
HOMCHAUDHURIB.Distributionally robust model predictive control for collision avoidance in the presence of stochastic obstacles[J].Proceedings of the Institution of Mechanical Engineers, Part Ⅰ: Journal of Systems and Control Engineering,2023,237(1):26-34.
doi: 10.1177/09544089221088261 |
| 5 |
BAOH Q,KANGQ,SHIX D,et al.Moment-based model predictive control of autonomous systems[J].IEEE Trans.on Intelligent Vehicles,2023,8(4):2939-2953.
doi: 10.1109/TIV.2023.3238023 |
| 6 |
KHANS,GUIVANTJ.Fast nonlinear model predictive planner and control for an unmanned ground vehicle in the presence of disturbances and dynamic obstacles[J].Scientific Reports,2022,12(1):12135.
doi: 10.1038/s41598-022-16226-y |
| 7 |
AJEILF H,IBRAHEEMI K,AZARA H,et al.Autonomous navigation and obstacle avoidance of an omnidirectional mobile robot using swarm optimization and sensors deployment[J].International Journal of Advanced Robotic Systems,2020,17(3):1729881420929498.
doi: 10.1177/1729881420929498 |
| 8 | ZHOU J, GAO Y L, JOHANSSON O, et al. Robust predictive motion planning by learning obstacle uncertainty[EB/OL]. [2024-04-06]. https://arxiv.org/abs/2403.06222. |
| 9 |
WEIH L,SHENC,SHIY.Distributed Lyapunov-based model predictive formation tracking control for autonomous underwater vehicles subject to disturbances[J].IEEE Trans.on Systems, Man, and Cybernetics: Systems,2021,51(8):5198-5208.
doi: 10.1109/TSMC.2019.2946127 |
| 10 |
LIS Y,YED,XIAOY,et al.Robust distributed model predictive control for satellite cluster reconfiguration with collision avoidance[J].Aerospace Science and Technology,2022,130,107917.
doi: 10.1016/j.ast.2022.107917 |
| 11 |
YANGH J,LIUL,YUNH,et al.Modeling and collision avoidance control for the disturbance-free payload spacecraft[J].Acta Astronautica,2019,164,415-424.
doi: 10.1016/j.actaastro.2019.07.025 |
| 12 | LIUX Y,CHANGH T,HUANGP F,et al.Robust output-feedback predictive control for proximity eddy current detumbling with constraints and uncertainty[J].IEEE Trans.on Aerospace and Electronic Systems,2023,59(2):858-870. |
| 13 |
SACCANID,CECCHINL,FAGIANOL.Multitrajectory model predictive control for safe UAV navigation in an unknown environment[J].IEEE Trans.on Control Systems Technology,2023,31(5):1982-1997.
doi: 10.1109/TCST.2022.3216989 |
| 14 |
ZHUH,ALONSO-MORAJ.Chance-constrained collision avoidance for MAVs in dynamic environments[J].IEEE Robotics and Automation Letters,2019,4(2):776-783.
doi: 10.1109/LRA.2019.2893494 |
| 15 | SACCANI D, FAGIANO L. Autonomous UAV navigation in an unknown environment via multi-trajectory model predictive control[C]//Proc. of the European Control Conference, 2021: 1577-1582. |
| 16 |
WENG H,LAMJ,FUJ J,et al.Distributed MPC-based robust collision avoidance formation navigation of constrained multiple USVs[J].IEEE Trans.on Intelligent Vehicles,2024,9(1):1804-1816.
doi: 10.1109/TIV.2023.3315367 |
| 17 | LEEC,VANT Q,KIMJ.Robust path tracking and obstacle avoidance using tube-based model predictive control for surface vehicles[J].International Federation of Automatic Control-PapersOnLine,2022,55(31):301-306. |
| 18 | ABDELAAL M, HAHN A. NMPC-based trajectory tracking and collision avoidance of unmanned surface vessels with rule-based colregs confinement[C]//Proc. of the IEEE Conference on Systems, Process and Control, 2016: 23-28. |
| 19 |
MAYNED Q,POLAKE.Algorithms for optimization problems with exclusion constraints[J].Journal of Optimization Theory and Applications,1986,51(3):453-473.
doi: 10.1007/BF00940285 |
| 20 | OKOLOKOI.Consensus-based attitude maneuver of multi-spacecraft with exclusion constraints[M].London:IntechOpen,2018. |
| 21 |
RAKOVICS V,ZHANGS X,HAOY Y,et al.Convex MPC for exclusion constraints[J].Automatica,2021,127,109502.
doi: 10.1016/j.automatica.2021.109502 |
| 22 | SUNH D,ZHANGS X,DAIL,et al.Locally convexified rigid tube MPC[J].IET Control Theory & Applications,2023,17(4):446-462. |
| 23 |
SUNH D,DAIL,WANGP Z.An efficient moving obstacle avoidance scheme for UAVs via output feedback robust MPC[J].IEEE Trans.on Aerospace and Electronic Systems,2024,60(5):6199-6212.
doi: 10.1109/TAES.2024.3401094 |
| 24 |
SUNH D,XIEH H,DAIL,et al.Convex distributed robust model predictive control for collision and obstacle avoidance[J].International Journal of Robust Nonlinear Control,2024,34(12):8334-8354.
doi: 10.1002/rnc.7390 |
| 25 |
XUY C,ZHENGH R,WUW M,et al.Robust hierarchical model predictive control for trajectory tracking with obstacle avoidance[J].IFAC-PapersOnLine,2020,53(2):15745-15750.
doi: 10.1016/j.ifacol.2020.12.056 |
| 26 | ESLAMIAND N, AMIADIFARD R. Moving target tracking and obstacle avoidance for a mobile robot using MPC[C]//Proc. of the 27th Iranian Conference on Electrical Engineering, 2019: 1163-1169. |
| 27 |
BRITOB,FLOORB,FERRANTIL,et al.Model predictive contouring control for collision avoidance in unstructured dynamic environments[J].IEEE Robotics and Automation Letters,2019,4(4):4459-4466.
doi: 10.1109/LRA.2019.2929976 |
| 28 |
TANGY J,CHENL Y,MOUJ M,et al.Robust model predictive control for ship collision avoidance under multiple uncertainties[J].IEEE Trans.on Transportation Electrification,2024,10(4):10374-10387.
doi: 10.1109/TTE.2024.3382032 |
| 29 | FRANCO A, SANTOS V. Short-term path planning with multiple moving obstacle avoidance based on adaptive MPC[C]//Proc. of the IEEE International Conference on Autonomous Robot Systems and Competitions, 2019. |
| 30 |
LIX H,SUNZ P,CAOD P,et al.Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles[J].Mechanical Systems and Signal Processing,2017,87,118-137.
doi: 10.1016/j.ymssp.2015.10.021 |
| 31 |
HANGP,HUANGS N,CHENX B,et al.Path planning of collision avoidance for unmanned ground vehicles: a nonlinear model predictive control approach[J].Proceedings of the Institution of Mechanical Engineers Part Ⅰ-Journal of Systems and Control Engineering,2021,235(2):222-236.
doi: 10.1177/0954411920971398 |
| 32 |
LUQ,ZHANGD,YEW J,et al.Targeting posture control with dynamic obstacle avoidance of constrained uncertain wheeled mobile robots including unknown skidding and slipping[J].IEEE Trans.on Systems Man Cybernetics-Systems,2021,51(11):6650-6659.
doi: 10.1109/TSMC.2019.2962732 |
| 33 |
QIET Q,WANGW D,YANGC,et al.An improved model predictive control-based trajectory planning method for automated driving vehicles under uncertainty environments[J].IEEE Trans.on Intelligent Transportation Systems,2023,24(4):3999-4015.
doi: 10.1109/TITS.2022.3230680 |
| 34 |
WANGL L,XUX Y,HANB,et al.Multiple autonomous underwater vehicle formation obstacle avoidance control using event-triggered model predictive control[J].Journal of Marine Science and Engineering,2023,11(10):2016.
doi: 10.3390/jmse11102016 |
| 35 | 葛甜,岳佳豪.改进人工势场法的避障轨迹规划[J].汽车实用技术,2023,48(23):50-55. |
| GET,YUEJ H.Improved obstacle avoidance trajectory planning by artificial potential field method[J].Automobile Applied Technology,2023,48(23):50-55. | |
| 36 | LIMOND,PEREIRAM,DE LA PENAD,et al.MPC for tracking periodic references[J].IEEE Trans.on Automatic Control,2015,61(4):1123-1128. |
| 37 |
MAYNED Q,SERONM M,RAKOVICS V.Robust model predictive control of constrained linear systems with bounded disturbances[J].Automatica,2005,41(2):219-224.
doi: 10.1016/j.automatica.2004.08.019 |
| 38 | 刘加涛. 智能车辆路径规划与跟踪控制研究[D]. 大连: 大连交通大学, 2023. |
| LIU J T. Research on intelligent vehicle path planning and tracking control[D]. Dalian: Dalian Jiaotong University, 2023. | |
| 39 | ROCKAFELLARR T.Convex analysis[M].Princeton:Princeton University Press,1970. |
| 40 |
RAOC V,RAWLINGSJ B.Steady states and constraints in model predictive control[J].AIChE Journal,1999,45(6):1266-1278.
doi: 10.1002/aic.690450612 |
| 41 | 李胜琴,邢佳祁.基于模型预测和转角补偿的智能汽车换道轨迹跟踪控制算法[J].江苏大学学报(自然科学版),2024,45(3):249-256. |
| LIS Q,XINGJ Q.Trajectory tracking control algorithm of lane changing for intelligent vehicle based on model prediction and angle compensation[J].Journal of Jiangsu University (Natural Science Edition),2024,45(3):249-256. | |
| 42 | 周岩,刘云龙,李擎.轮式移动机器人复合分层抗干扰轨迹跟踪控制[J].北京信息科技大学学报(自然科学版),2024,39(3):1-7. |
| ZHOUY,LIUY L,LIQ.Composite hierarchical anti-disturbance trajectory tracking control of wheeled mobile robot[J].Journal of Beijing Information Science & Technology University (Science and Technology Edition),2024,39(3):1-7. | |
| 43 | 马世典,侯桐,江浩斌,等.自动泊车前轮转角闭环的分层控制方案[J].江苏大学学报(自然科学版),2024,45(4):396-403. |
| MAS D,HOUT,JIANGH B,et al.Closed-loop layered control strategy of front wheel angle for automatic parking system[J].Journal of Jiangsu University (Natural Science Edition),2024,45(4):396-403. | |
| 44 |
RAKOVICS V,KERRIGANE C,KOURAMASK I,et al.Invariant approximations of the minimal robust positively invariant set[J].IEEE Trans.on Automatic Control,2005,50(3):406-410.
doi: 10.1109/TAC.2005.843854 |
| [1] | ZHANG Duanjin, GAO Xiaobei. H∞ filtering for uncertain networked systems with limited communication using Delta operator [J]. Systems Engineering and Electronics, 2017, 39(8): 1864-1870. |
| [2] | XU Fei1,2, LIU Ming-yong1, LI Wen-bai1, LEI Xiao-kang1. Research on digital redesign of the robust controller for parametric uncertain systems [J]. Journal of Systems Engineering and Electronics, 2013, 35(1): 156-160. |
| [3] | WANG Shi-gang,WU Jun-feng. Observer-based non-fragile H∞ control for a class of uncertain time-delay sampled-data systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(6): 1352-1357. |
| [4] | WANG Yu-fei, JIANG Chang-sheng. Direct adaptive fuzzy sliding mode control with variable universe for near space vehicle [J]. Journal of Systems Engineering and Electronics, 2011, 33(3): 633-637. |
| [5] | WANG Jia, LIN Yu-feng, XING Wei. Guaranteed cost H∞ control with disk pole constraints [J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 666-670. |
| [6] | XU Xiang-yuan. Backstepping technique and its application in uncertain systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(11): 2703-2709 . |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||