Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 3118-3127.doi: 10.12305/j.issn.1001-506X.2024.09.24
• Guidance, Navigation and Control • Previous Articles
Geometrically robust control in multi-satellite attitude coordination
Yang HU1, Xuechao LIU2, Huayi LI1,*, Qian CAO1
- 1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
2. DongFang Hong Satellite Company Limited, Beijing 100094, China
-
Received:2023-09-15Online:2024-08-30Published:2024-09-12 -
Contact:Huayi LI
CLC Number:
Cite this article
Yang HU, Xuechao LIU, Huayi LI, Qian CAO. Geometrically robust control in multi-satellite attitude coordination[J]. Systems Engineering and Electronics, 2024, 46(9): 3118-3127.
share this article

Fig.1
Mapping relation on Lie group"

Table 1
Initial state of spacecrafts"
| 航天器序号 | 初始姿态/(°)(偏航, 俯仰, 滚转) | 初始角速度/(rad/s) |
| 1 | (10, 6, 0) | (0.12, -0.08, -0.2) |
| 2 | (30, 20, 15) | (0.1, 0.08, 0.2) |
| 3 | (-8, 10, -5) | (-0.05, -0.09, -0.1) |
| 4 | (-10, 0, 4) | (-0.1, 0.08, 0.1) |
| 5 | (0, -3, 2) | (0.1, 0.09, 0.08) |
| 6 | (-10, 0, 4) | (-0.06, -0.07, 0.12) |

Fig.2
Undirected communication graph ofA in multi-satellite attitude collaboration"


Fig.3
Undirected communication graph of A in given desired attitude"


Fig.4
Fitting of virtual perturbation of spacecraft 1"


Fig.5
Estimation error of virtual perturbation moment"


Fig.6
InEKF attitude estimation"


Fig.7
Attitude change during multi-satellite attitude collaboration"
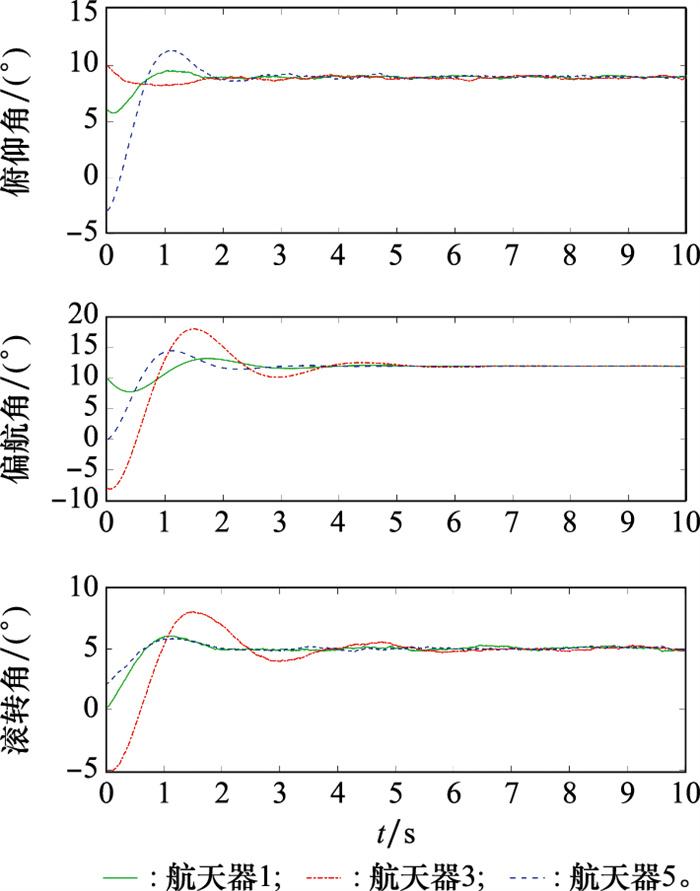

Fig.8
Control torque variation during multi-satellite attitude collaboration"


Fig.9
Attitude change during expected attitude tracking"


Fig.10
Angular velocity variation during expected attitude tracking"


Fig.11
Control torque variation during expected attitude tracking"


Fig.12
Attitude changes under actuator capability constraints"


Fig.13
Control torque variation under actuator capacity constraints"


Fig.14
Comparison curve of relative attitude error Eco"

| 1 |
FANL M,HUANGH,ZHOUK X.Robust fault-tolerant attitude control for satellite with multiple uncertainties and actuator faults[J].Chinese Journal of Aeronautics,2020,33(12):3380-3394.
doi: 10.1016/j.cja.2020.06.026 |
| 2 |
CAPUANOV,HARVARDA,CHUNGS J.On-board cooperative spacecraft relative navigation fusing GNSS WITH vision[J].Progress in Aerospace Sciences,2022,128,100761.
doi: 10.1016/j.paerosci.2021.100761 |
| 3 |
YED,ZOUA M,SUNZ W.Predefined-time predefined-bounded attitude tracking control for rigid spacecraft[J].IEEE Trans.on Aerospace Electronic Systems,2022,58(1):464-472.
doi: 10.1109/TAES.2021.3103258 |
| 4 | 马鸣宇,董朝阳,马思迁,等.多航天器反步滑模SO(3)协同控制[J].宇航学报,2018,39(6):664-673. |
| MAM Y,DONGC Y,MAS Q,et al.Coordinated attitude CONTROL of multiple spacecraft via backstepping sliding mode method on SO(3)[J].Journal of Astronautics,2018,39(6):664-673. | |
| 5 | WANGW T,XIANGZ R.Distributed consensus tracking control for nonlinear multiagent systems with state delays and unknown control coefficients[J].International Journal of Robust and Nonlinear Control,2021,32(4):2050-2068. |
| 6 |
NUNOE,ORTEGAR.Achieving consensus of Euler-Lagrange agents with interconnecting delays and without velocity measurements via passivity-based control[J].IEEE Trans.on Control Systems Technology,2018,26(1):222-232.
doi: 10.1109/TCST.2017.2661822 |
| 7 |
GAOH,XIAY Q,ZHANGX P,et al.Distributed fixed-time attitude coordinated control for multiple spacecraft with actuator saturation[J].Chinese Journal of Aeronautics,2022,35(4):292-302.
doi: 10.1016/j.cja.2021.05.022 |
| 8 |
RENY,WANGH M,XIED,et al.New terminal sliding mode consensus algorithm for disturbed second-order multi-agent systems[J].International Journal of Control, Automation, and Systems,2022,20(8):2534-2542.
doi: 10.1007/s12555-021-0438-9 |
| 9 | LIANGS,WANGF Y,LIUZ X,et al.Necessary and sufficient conditions for leader-follower consensus of discrete-time multiagent systems with smart leader[J].IEEE Trans.on Systems, Man, and Cybernetics: Systems,2021,52(5):2779-2788. |
| 10 |
DUH B,ZHUW W,WENG H,et al.Finite-time formation control for a group of quadrotor aircraft[J].Aerospace Science and Technology,2017,69,609-616.
doi: 10.1016/j.ast.2017.07.012 |
| 11 | XIEX,SHENGT,HEL,et al.Distributed attitude consensus tracking control for spacecraft formation flying via adaptive nonsingular fast terminal sliding mode control[J].Journal of Aerospace Engineering,2022,236(8):1603-1616. |
| 12 |
YEFYMENKON,KUDERMETOVR.Quaternion models of a rigid body rotation motion and their application for spacecraft attitude control[J].Acta Astronautica,2022,194,76-82.
doi: 10.1016/j.actaastro.2022.01.029 |
| 13 |
ZHANGL,LIUQ Z,FANG W,et al.Parametric control for flexible spacecraft attitude maneuver based on disturbance observer[J].Aerospace Science and Technology,2022,130,107952.
doi: 10.1016/j.ast.2022.107952 |
| 14 | CHATURVEDI N A. Global dynamics and stabilization of rigid body attitude systems[D]. Ann Arbor: University of Michigan, 2007. |
| 15 |
POSIELEKT,JOHANNR.Attitude reconstruction of a spacecraft from temperature measurements in solar eclipse analysis and observer design for a not globally observable nonlinear system[J].IEEE Trans.on Control Systems Technology,2023,31(2):631-645.
doi: 10.1109/TCST.2022.3187916 |
| 16 |
HUD Y,ZHAOX T,ZHANGS J.Robust image-based coordinated control for spacecraft formation flying[J].Chinese Journal of Aeronautics,2022,35(9):268-281.
doi: 10.1016/j.cja.2021.10.020 |
| 17 | HASHEMIS H,PARIZN,HOSSEINIS S K.Observer-based hybrid control for global attitude tracking on SO(3) with input quantisation[J].International Journal of Control,2022,96(5):1352-1363. |
| 18 |
MENGQ K,YANGH,JIANGB.Second-order sliding-mode on SO(3) and fault-tolerant spacecraft attitude control[J].Automatica,2023,149,110814.
doi: 10.1016/j.automatica.2022.110814 |
| 19 |
SHIZ,XIEY E,DENGC C,et al.Disturbance observer based finite-time coordinated attitude tracking control for spacecraft on SO(3)[J].Journal of Systems Engineering and Electronics,2020,31(6):1274-1285.
doi: 10.23919/JSEE.2020.000098 |
| 20 |
ZHENQ Z,WANL,LIY L,et al.Formation control of a multi-AUVs system based on virtual structure and artificial potential field on SE(3)[J].Ocean Engineering,2022,253,111148.
doi: 10.1016/j.oceaneng.2022.111148 |
| 21 |
LEET.Global exponential attitude tracking controls on SO(3)[J].IEEE Trans.on Automatic Control,2015,60(10):2837-2842.
doi: 10.1109/TAC.2015.2407452 |
| 22 | 邵海俊,缪玲娟,郭岩冰.一种用于SINS行进间对准的模糊抗野值滤波算法[J].宇航学报,2020,41(4):447-455. |
| SHAOH J,MIAOL J,GUOY B.A robust filter based on fuzzy theory for SINS in-motion alignment[J].Journal of Astronautics,2020,41(4):447-455. | |
| 23 |
BARRAUA,BONNABELS.Invariant Kalman filtering[J].Annual Review of Control Robotics and Autonomous Systems,2018,1(1):237-257.
doi: 10.1146/annurev-control-060117-105010 |
| 24 |
OLFATI-SABERR.Flocking for multi-agent dynamic systems: algorithms and theory[J].IEEE Trans.on Automatic Control,2006,51(3):401-420.
doi: 10.1109/TAC.2005.864190 |
| 25 |
周健,龚春林,粟华,等.复杂约束下的编队姿态有限时间协同控制方法[J].宇航学报,2018,39(12):1340-1347.
doi: 10.3873/j.issn.1000-1328.2018.12.004 |
|
ZHOUJ,GONGC L,SUH,et al.Finite-time distributed synchronization of spacecraft formation attitude with complex constraints[J].Journal of Astronautics,2018,39(12):1340-1347.
doi: 10.3873/j.issn.1000-1328.2018.12.004 |
|
| 26 |
ELAHIA,ALFIA,MODARESH.Distributed consensus control of vehicular platooning under delay, packet DROPOUT and noise: relative state and relative input-output control strategies[J].Transactions on Intelligent Transportation Systems,2022,23(11):20123-20133.
doi: 10.1109/TITS.2022.3174060 |
| 27 | HUO J H, MENG T, JIN Z H. Adaptive attitude control using neural network observer disturbance compensation technique[C]//Proc. of the IEEE 9th International Conference on Recent Advances in Space Technologies, 2019: 697-701. |
| 28 | WANGZ,WUZ.Nonlinear attitude control scheme with disturbance observer for flexible spacecrafts[J].Nonlinear Dynamics,2015,81(1/2):257-264. |
| 29 | YAN R D, WU Z. Nonlinear disturbance observer-based spacecraft attitude control subject to disturbances and actuator faults[C]// Proc. of the 5th International Conference on Computer-Aided Design, Manufacturing, Modeling and Simulation, 2017. |
| 30 |
LEED.Nonlinear disturbance observer-based robust control for spacecraft formation flying[J].Aerospace Science and Technology,2018,76,82-90.
doi: 10.1016/j.ast.2018.01.027 |
| 31 |
ALIPOURM,FANIS F,KABGANIANM.Inertia-free nonlinear attitude tracking with disturbance compensation using adaptive-sliding control based on quaternion algebra[J].Simulation,2020,96(1):43-54.
doi: 10.1177/0037549719854178 |
| 32 |
AMIRKHANIA,BARSHOOIA H.Consensus in multi-agent systems: a review[J].Artificial Intelligence Review,2022,55(5):3897-3935.
doi: 10.1007/s10462-021-10097-x |
| [1] | Tong HE, Qing LU, Jun ZHOU, Zongyi GUO. Line-of-sight angle constraint guidance with neural network interference observer [J]. Systems Engineering and Electronics, 2024, 46(4): 1372-1382. |
| [2] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [3] | DONG Chaoyang, MA Mingyu, WANG Qing, ZHOU Min. Attitude cooperative control of multiple spacecraft on SO(3) with communication time-delay [J]. Systems Engineering and Electronics, 2018, 40(9): 2032-2039. |
| [4] | LI Fei, HU Jianbo, WANG Jianhao, WANG Tao. Adaptive Backstepping sliding mode control for a class of uncertain nonlinear systems with input constraints [J]. Systems Engineering and Electronics, 2017, 39(8): 1823-1833. |
| [5] | HAN Xiaohai, ZHANG Yaohui, ZHANG Shixin, WANG Shaohua. Research on the method of equipment’s dependability evaluation with an unknown failure distribution [J]. Systems Engineering and Electronics, 2017, 39(6): 1414-1419. |
| [6] | HAN Xiao-hai, ZHANG Yao-hui, WANG Shao-hua, XU Long-yang. Equipment’s condition evaluation based on the analysis of correlation dimension [J]. Systems Engineering and Electronics, 2016, 38(1): 110-115. |
| [7] | LI Xiang, WANG Xiao-peng. Study on shape parameter selection for surrogate model -constructed by using radial basis function [J]. Systems Engineering and Electronics, 2015, 37(3): 688-692. |
| [8] | GAI Jun-feng, ZHAO Guo-rong, SONG Chao. Model predictive control based on linearization and neural network approach [J]. Systems Engineering and Electronics, 2015, 37(2): 394-399. |
| [9] | DI Xiao-guang, HAO Chuang-zhou. Path-attitude anti-decoupling control of air-breathing hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2013, 35(5): 1045-1048. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||