Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (8): 2686-2695.doi: 10.12305/j.issn.1001-506X.2025.08.26
• Guidance, Navigation and Control • Previous Articles Next Articles
Adaptive IMM-UKF maneuvering target tracking algorithm
Xiao ZHOU1, Xingang MOU1,*, Wen KE1, Ying SU2, Li WANG2
- 1. Institute of Electronic and Mechanical Engineering,Wuhan University of Technology,Wuhan 430070,China
2. Wuhan Guide Infrared Co.,Ltd.,Wuhan 430223,China
-
Received:2024-10-31Online:2025-08-31Published:2025-09-04 -
Contact:Xingang MOU
CLC Number:
Cite this article
Xiao ZHOU, Xingang MOU, Wen KE, Ying SU, Li WANG. Adaptive IMM-UKF maneuvering target tracking algorithm[J]. Systems Engineering and Electronics, 2025, 47(8): 2686-2695.
share this article

Fig.1
Target location diagram"
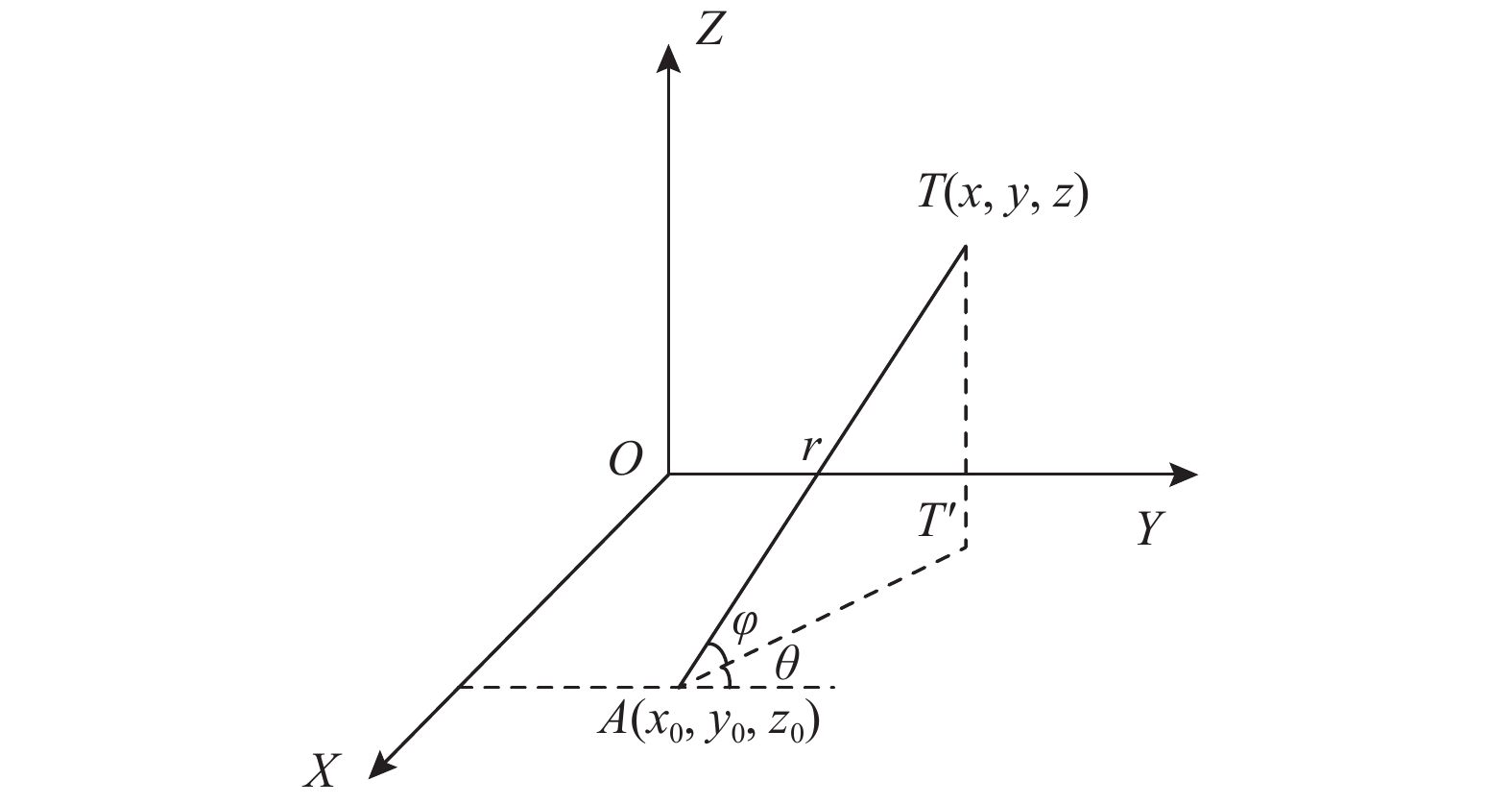

Fig.2
Process of IMM algorithm"
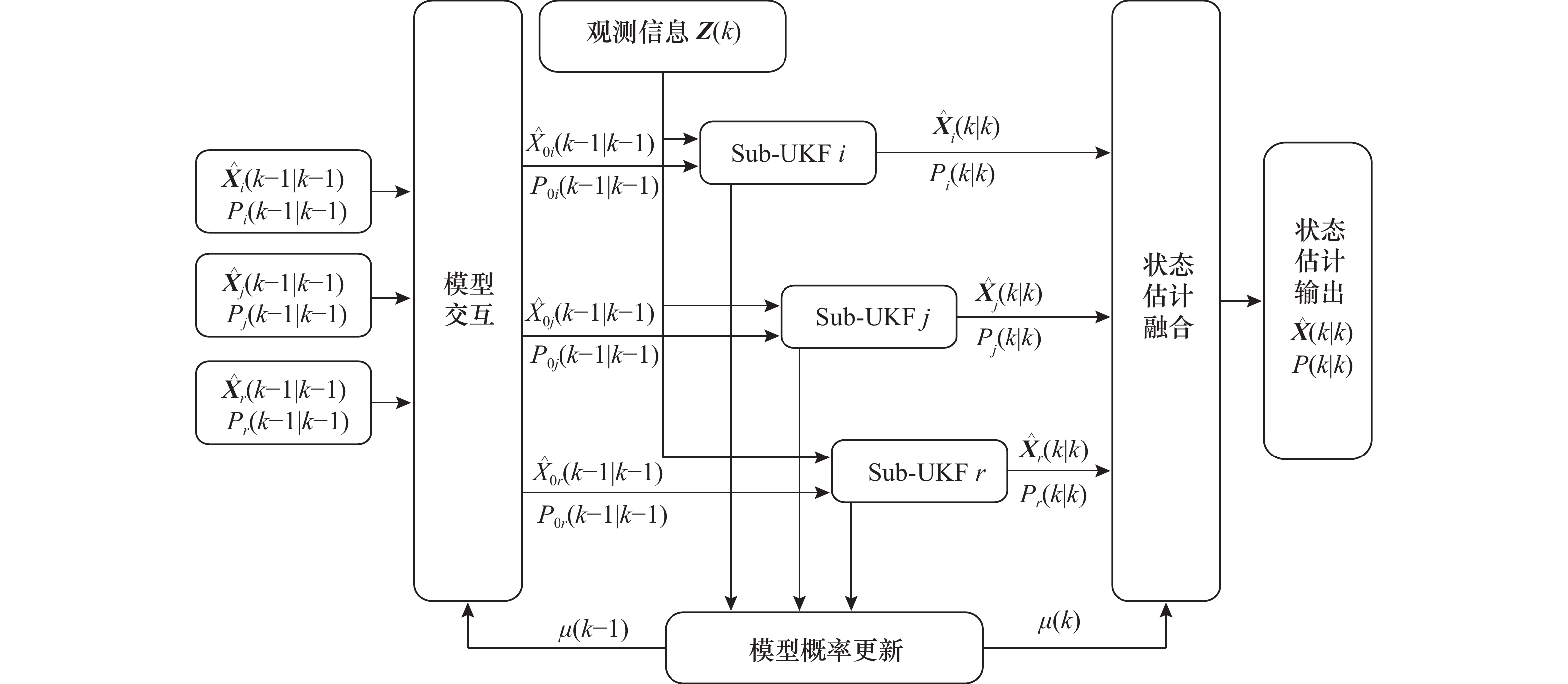
Fig.3
TPM update process"
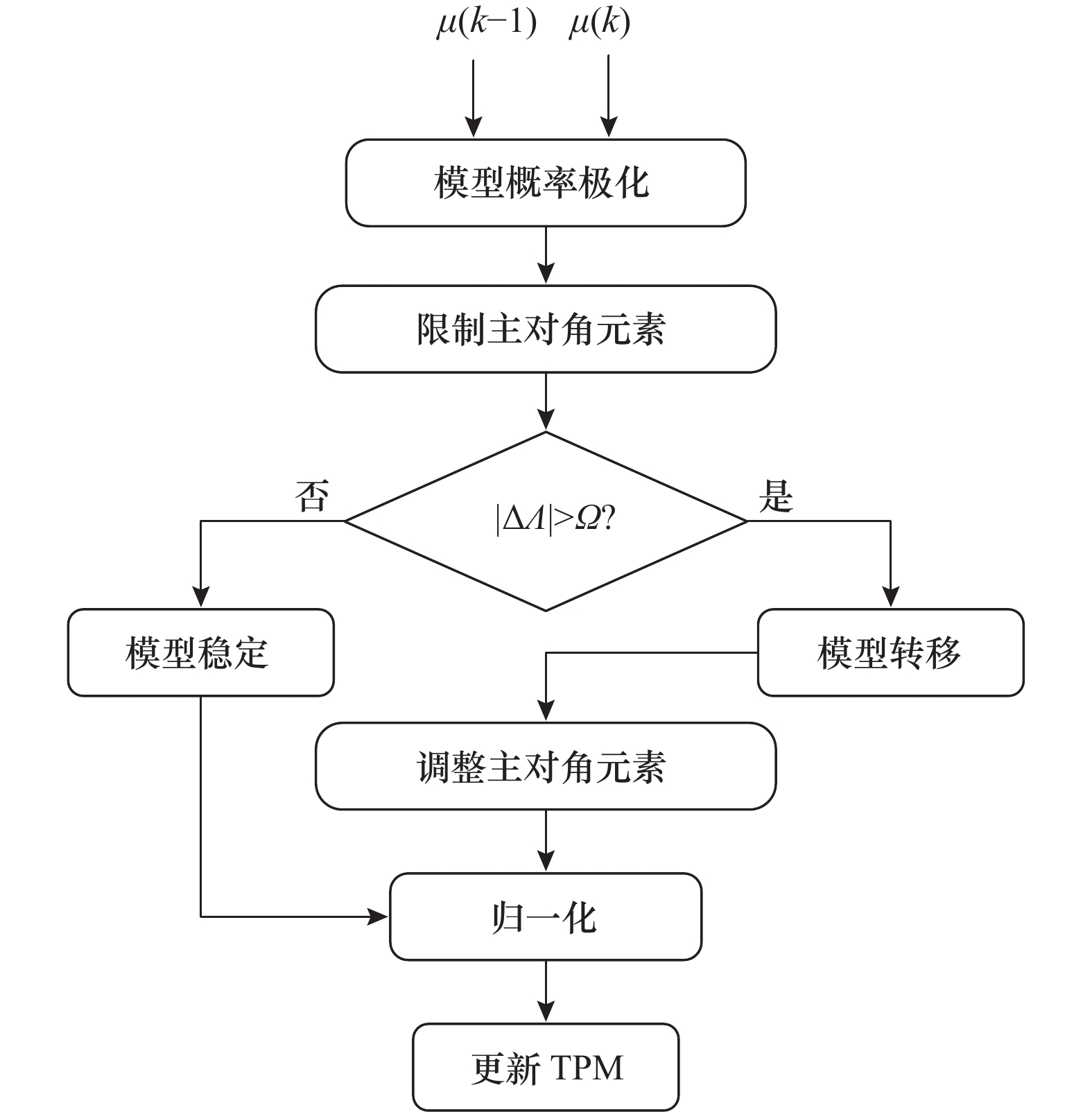
Table 1
Scenario 1 model"
| 运动模型 | 时间/s | 运动参数 |
| CA | 1~200 | a = 10 m/s2 |
| CV | 201~400 | v = 300 m/s |
| CT | 401~600 | ω = 0.02 rad/s |
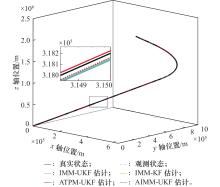
Fig.4
Real and predicted trajectories"
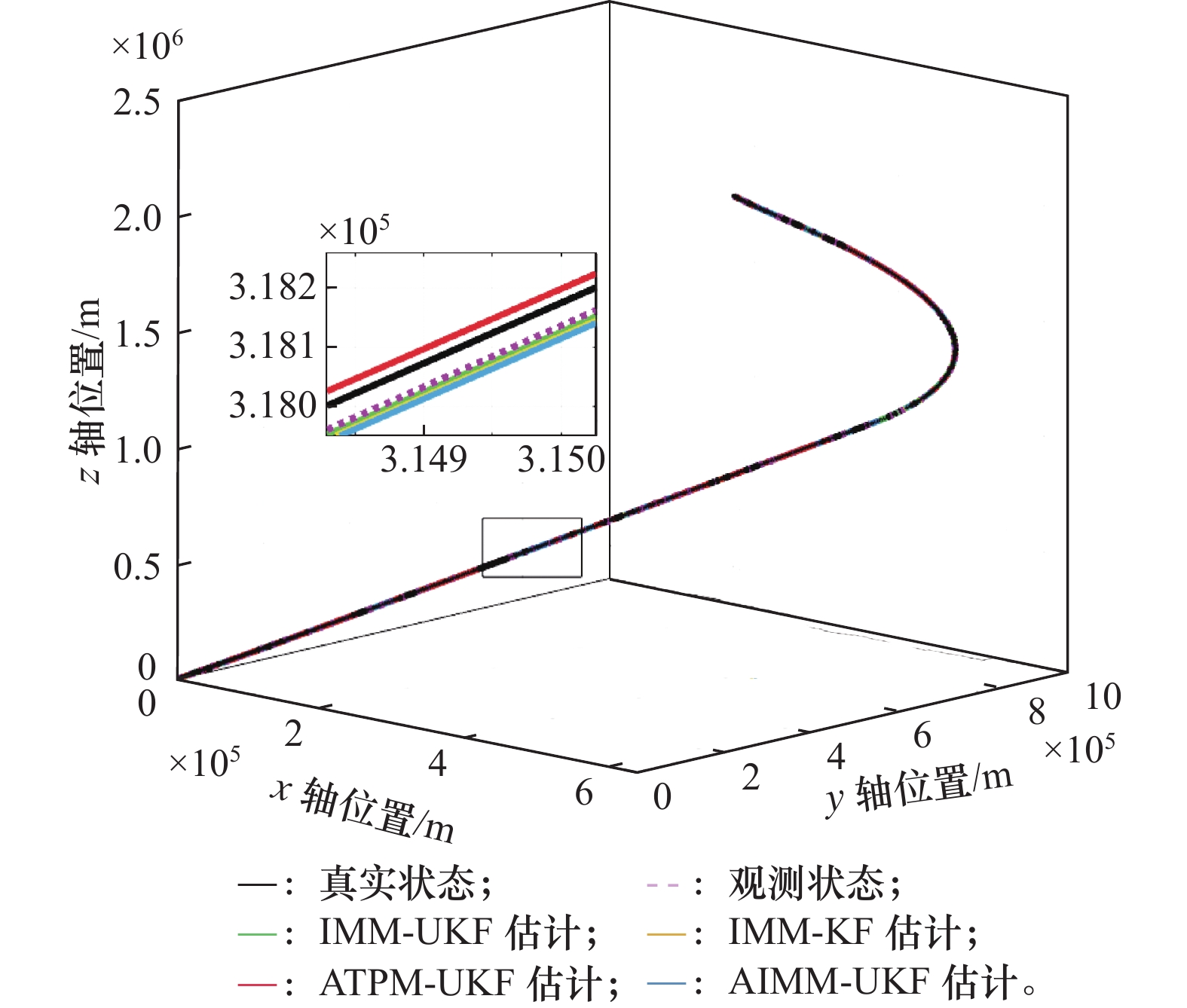

Fig.5
RMSE of position and velocity"
Table 2
Comparison of average RMSE"
| 算法 | 位置/m | 速度/(m/s) |
| IMM-KF | 82.15 | 25.22 |
| IMM-UKF | 78.55 | 25.17 |
| AIMM-UKF | 76.89 | 16.55 |
| ATPM-UKF | 65.75 | 12.17 |
Fig.6
IMM-UKF model probability"
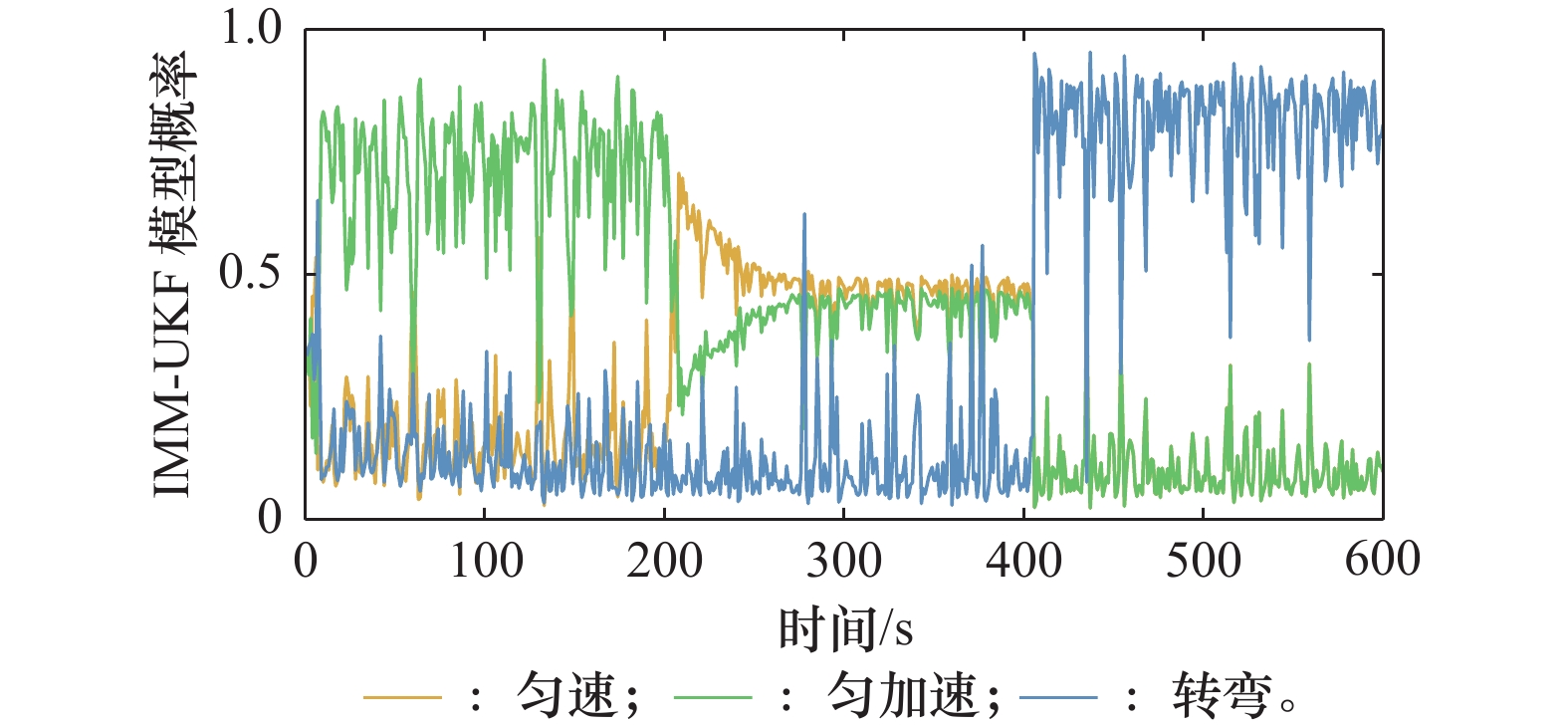
Fig.7
AIMM-UKF model probability"
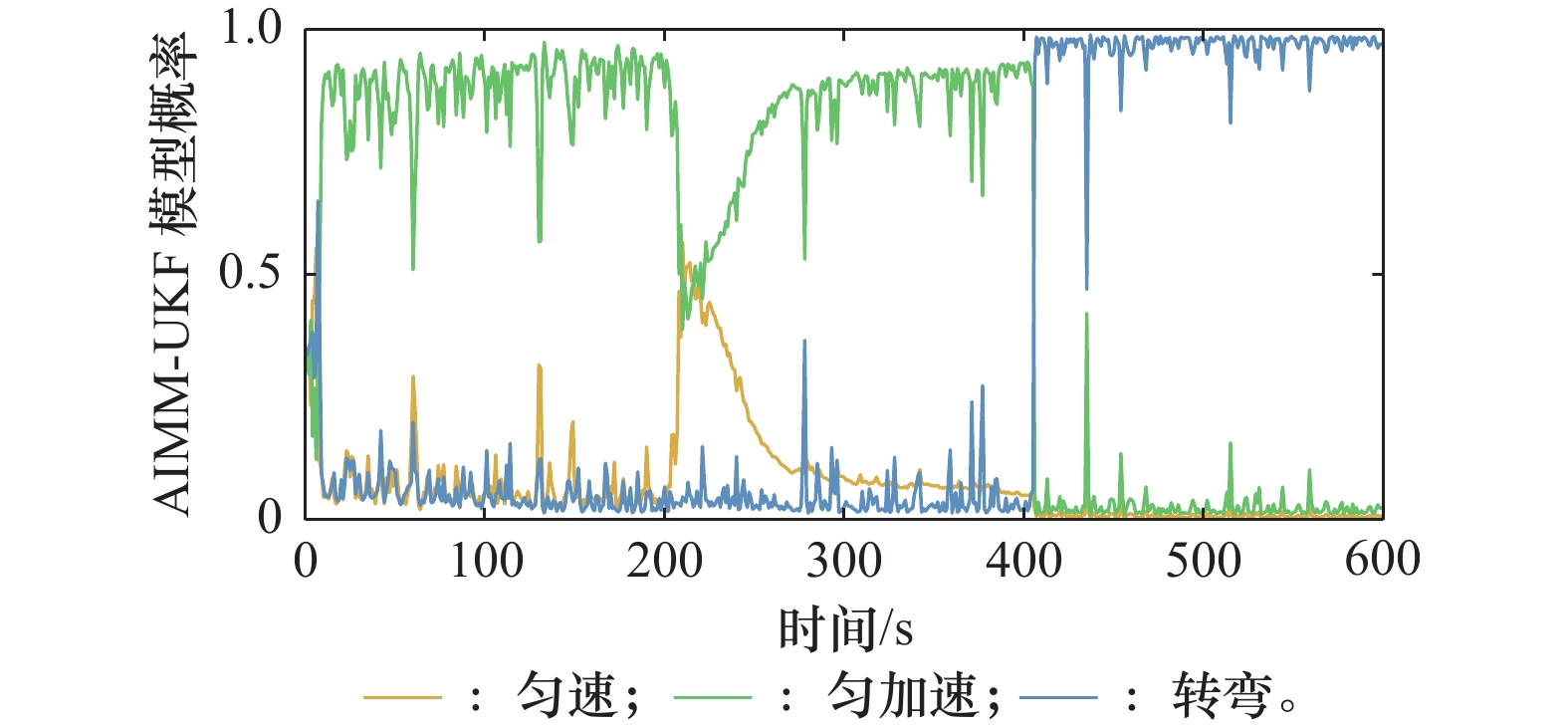
Fig.8
ATPM-UKF model probability"
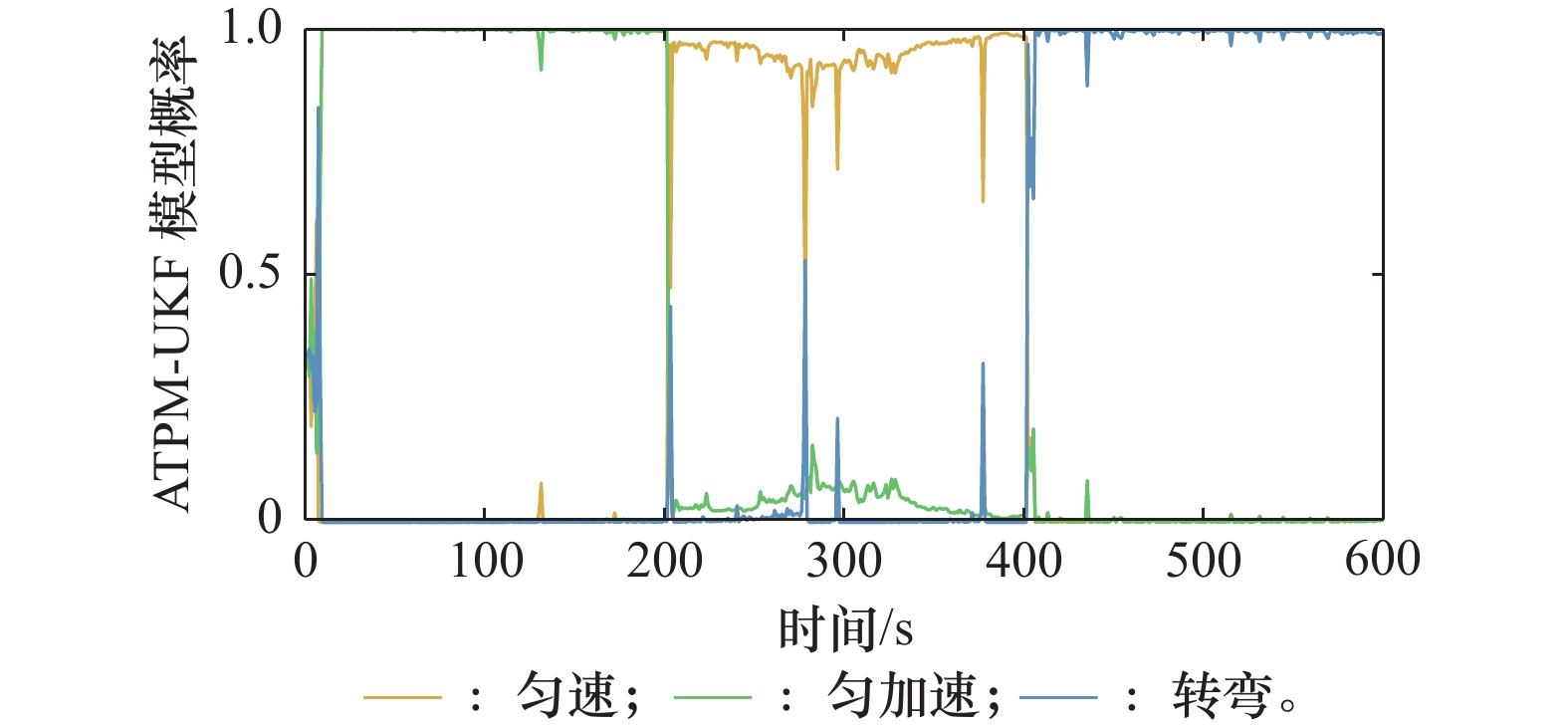
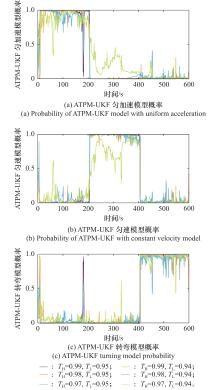
Fig.9
Effect of $T_{\mathrm{H}}/T_{\mathrm{L}} $ on different model probabilities"
Fig.10
Likelihood functions for ATPM-UKF model"
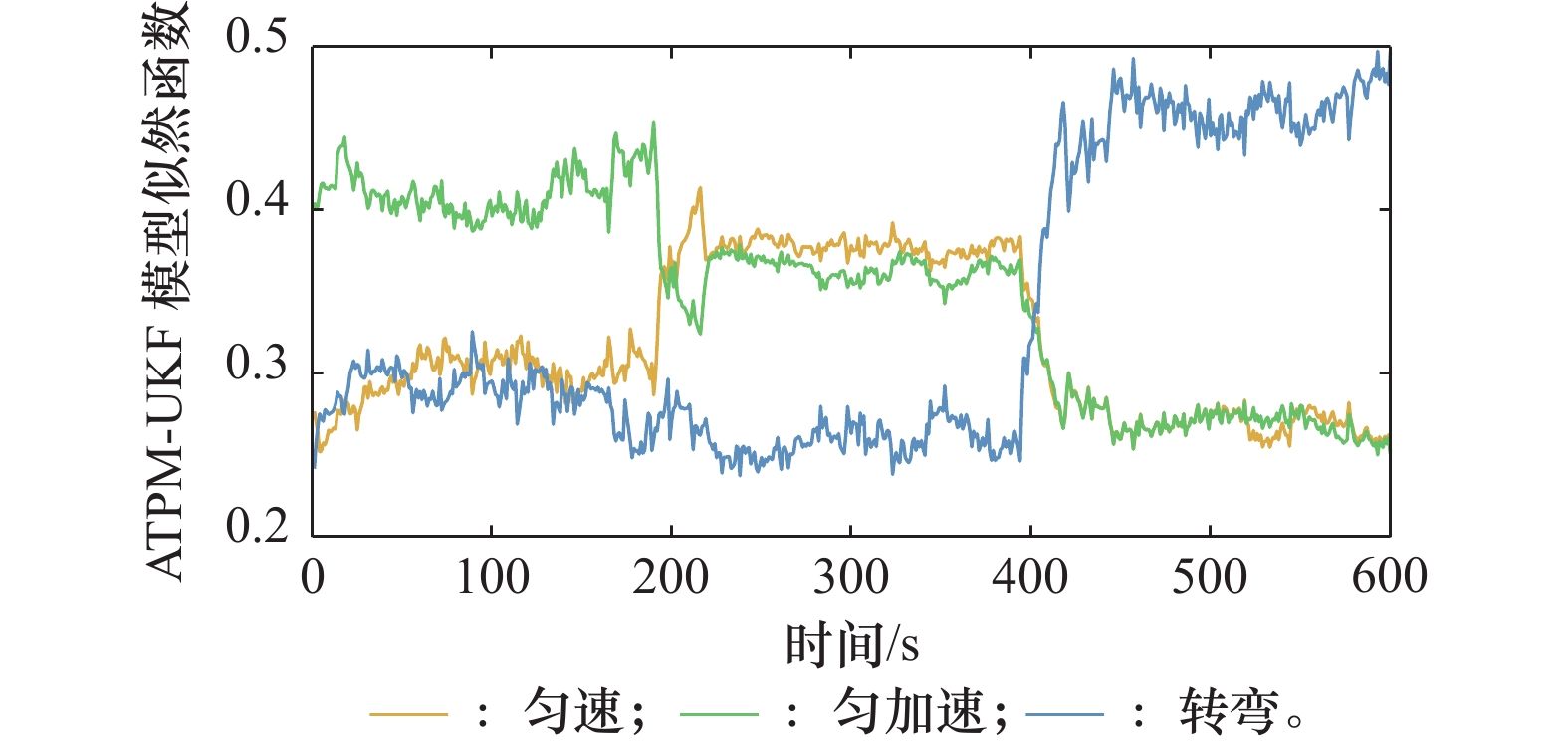
Fig.11
Comparison of model probabilities with model transfer acceleration algorithm"
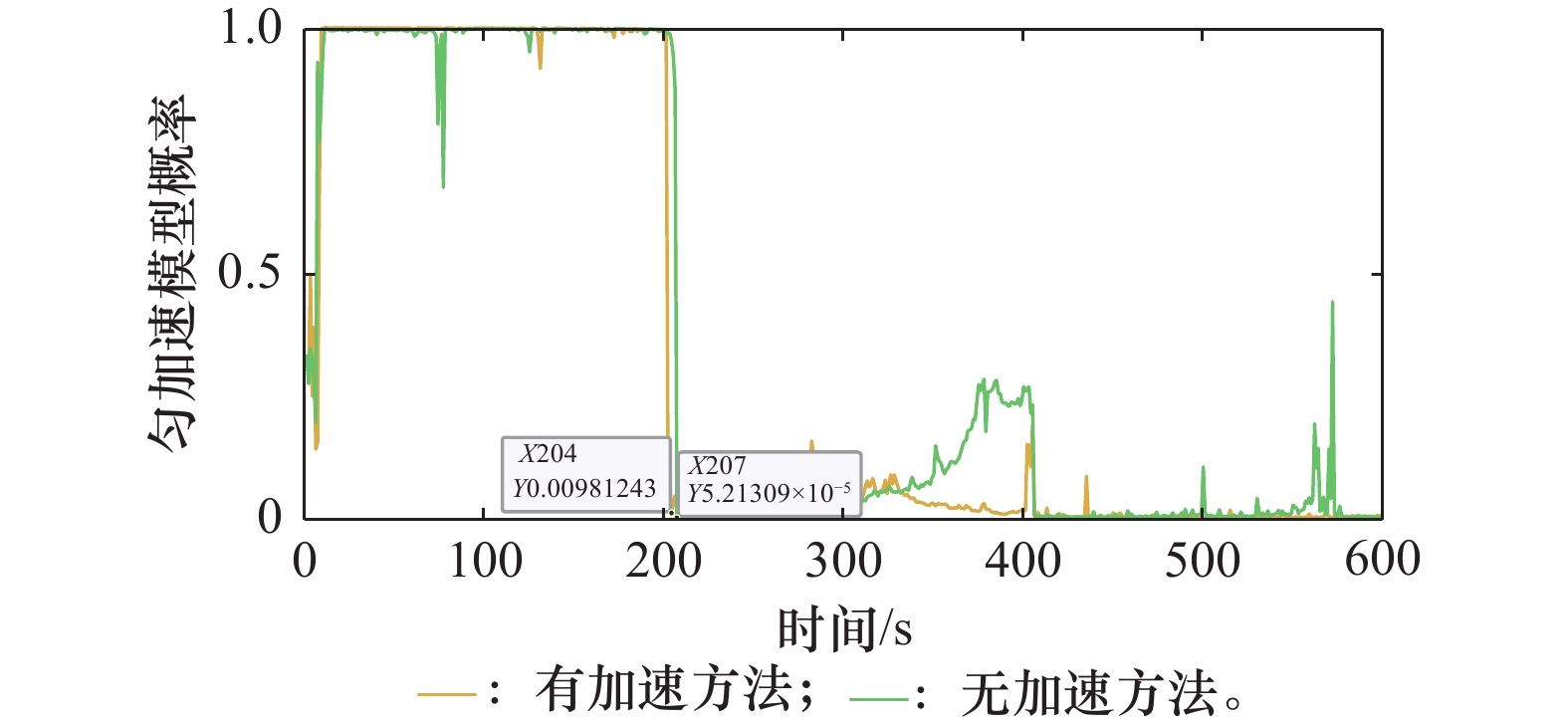
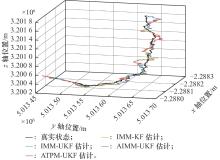
Fig.12
Flight trajectory of target"
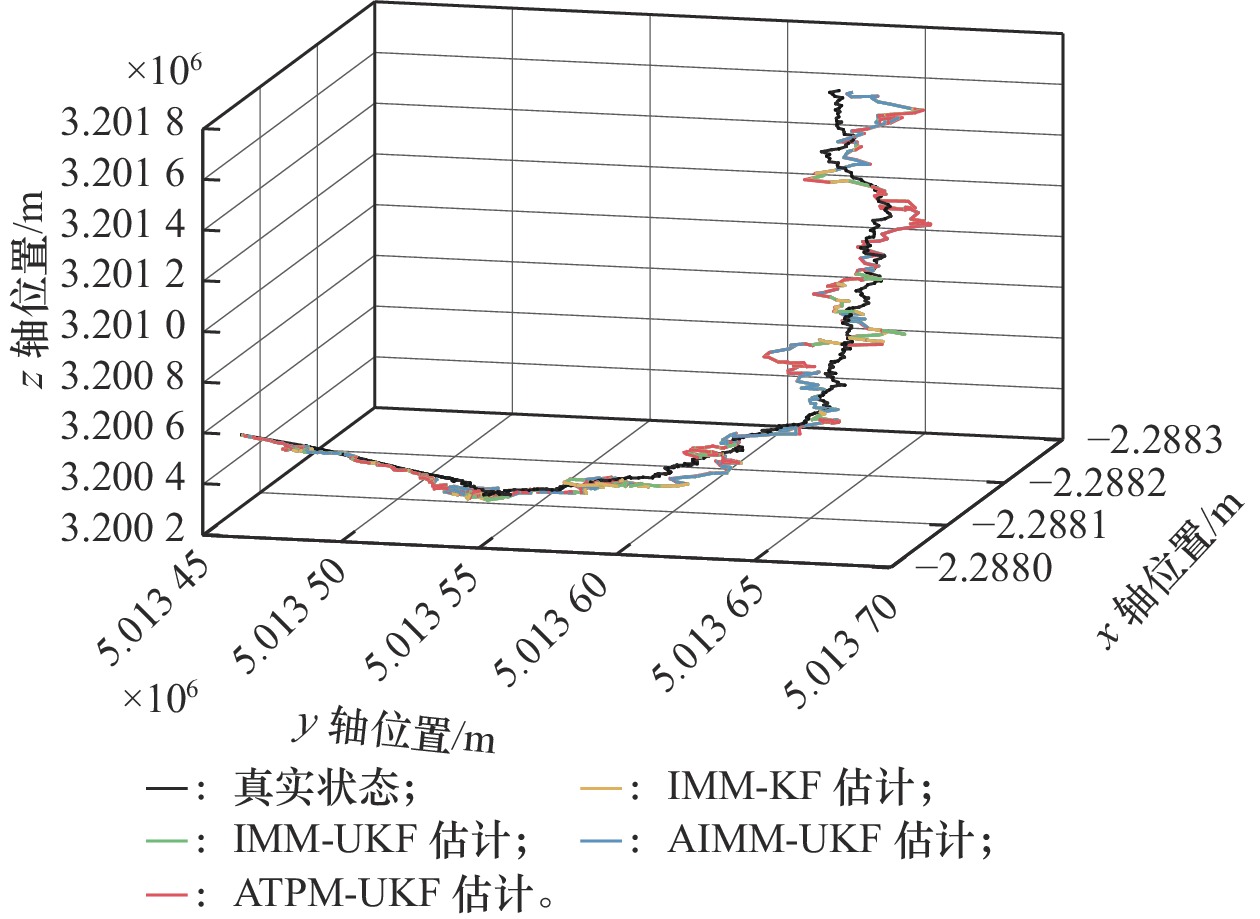
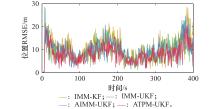
Fig.13
RMSE of position in flight experiment"
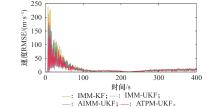
Fig.14
RMSE of speed in flight experiment"
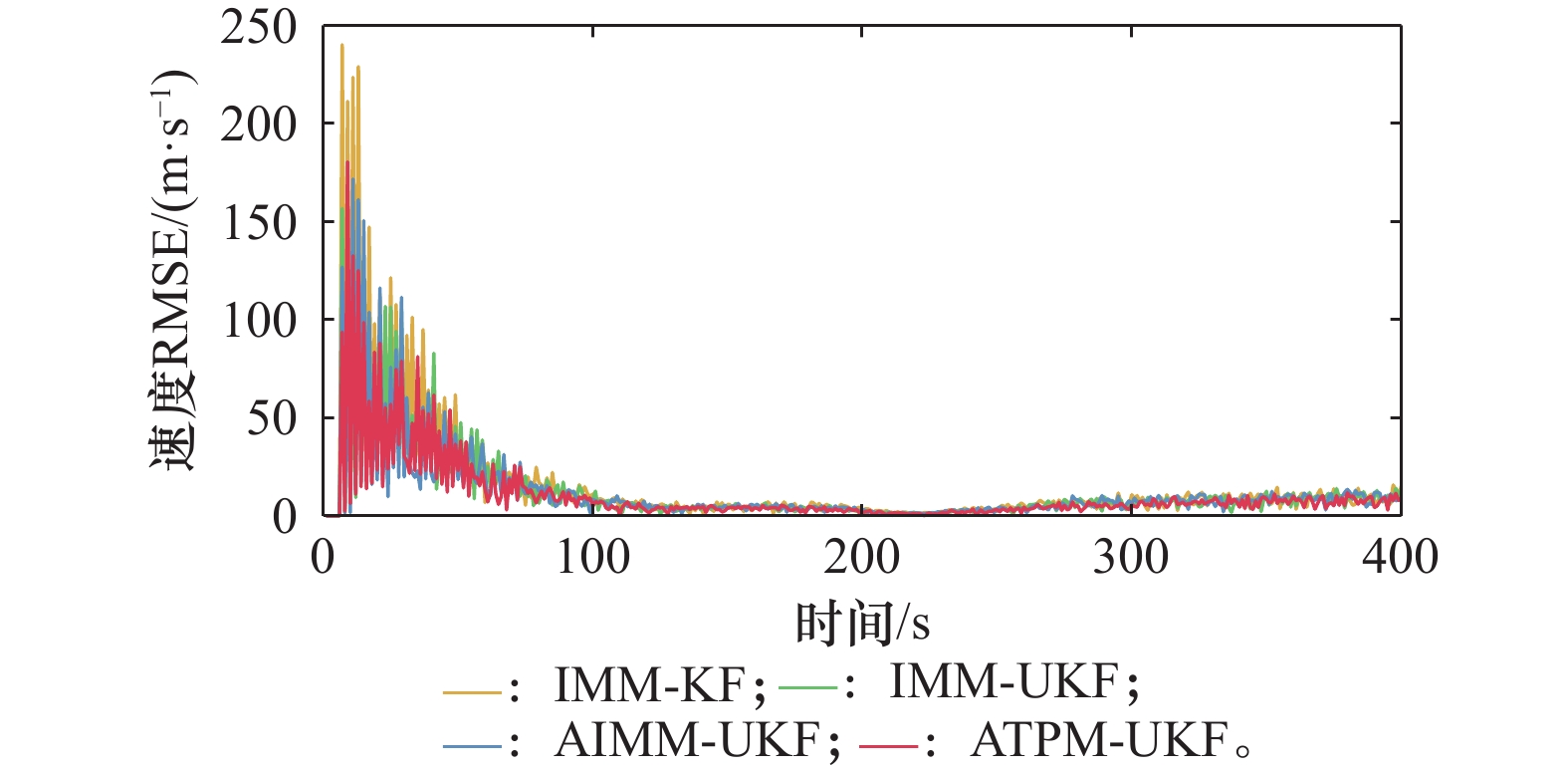
Table 3
Comparison of average RMSE"
| 算法 | 位置/m | 速度/(m/s) |
| IMM-KF | 10.81 | 14.21 |
| IMM-UKF | 9.43 | 11.74 |
| AIMM-UKF | 9.40 | 11.47 |
| ATPM-UKF | 8.13 | 10.26 |
| 1 |
WANG J, HE J C, PENG B, et al. Generalized interacting multiple model Kalman filtering algorithm for maneuvering target tracking under non-Gaussian noises[J]. ISA Transaction, 2024, 155, 148- 163.
doi: 10.1016/j.isatra.2024.09.015 |
| 2 | 程雨. 基于单测向站的目标跟踪算法研究[D]. 武汉: 华中科技大学, 2019. |
| CHENG Y. Research on target tracking algorithm based on single direction finding station[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| 3 | 王芝燕. 低空机动目标跟踪算法研究[D]. 成都: 电子科技大学, 2022. |
| WANG Z Y. Research on low altitude maneuvering target tracking algorithm[D]. Chengdu: University of Electronic Science and Technology of China, 2022. | |
| 4 | YANG B J, WANG H G, SHI Z Y. Interacting multiple model adaptive robust Kalman filter for process and measurement modeling errors simultaneously[J]. Signal Processing, 2024, 227, 109743. |
| 5 |
ARROYO C A, ASENSIO V M. Adaptive IMM-UKF for airborne tracking[J]. Aerospace, 2023, 10 (8): 698.
doi: 10.3390/aerospace10080698 |
| 6 | XIE G, SUN L L, WEN T, et al. Adaptive transition probability matrix-based parallel IMM algorithm[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (5): 2980- 2989. |
| 7 |
XU W W, XIAO J K, XU D L, et al. An adaptive IMM algorithm for a PD radar with improved maneuvering target tracking performance[J]. Remote Sensing, 2024, 16 (6): 1051.
doi: 10.3390/rs16061051 |
| 8 | 王平波, 陈强, 卫红凯, 等. 一种基于模型概率单调性变化的自适应IMM-UKF改进算法[J]. 电子与信息学报, 2024, 46 (1): 41- 48. |
| WANG P B, CHEN Q, WEI H K, et al. An improved adaptive IMM-UKF algorithm based on monotonicity change of model probability[J]. Journal of Electronics & Information Technology, 2024, 46 (1): 41- 48. | |
| 9 | 臧荣春, 崔平远. 马尔可夫参数自适应IFIMM算法研究[J]. 电子学报, 2006, 34 (3): 521- 524. |
| ZANG R C, CUI P Y. Research on adaptive Markov parameter IFIMM algorithm[J]. Acta Electronica Sinica, 2006, 34 (3): 521- 524. | |
| 10 | 封普文, 黄长强, 曹林平, 等. 马尔可夫矩阵修正IMM跟踪算法[J]. 系统工程与电子技术, 2013, 35 (11): 2269- 2274. |
| FENG P W, HUANG C Q, CAO L P, et al. Markov matrix modified IMM tracking algorithm[J]. Systems Engineering and Electronics, 2013, 35 (11): 2269- 2274. | |
| 11 | LEE I H, PARK C G. An improved interacting multiple model algorithm with adaptive transition probability matrix based on the situation[J]. International Journal of Control, Automation and Systems, 2023, 21 (10): 3299- 3312. |
| 12 |
DENG L C, LI D, LI R F. Improved IMM algorithm based on RNNs[J]. Journal of Physics: Conference Series, 2020, 1518 (1): 12055.
doi: 10.1088/1742-6596/1518/1/012055 |
| 13 | BECKER S, HUG R, HUEBNER W, et al. An RNN-based IMM filter surrogate[J]. Image Analysis, 2019, 11482, 387- 398. |
| 14 |
LUI D G, TARTAGLIONE G, CONTI F, et al. Long short-term memory-based neural networks for missile maneuvers trajectories prediction[J]. IEEE Access, 2023, 11, 30819- 30831.
doi: 10.1109/ACCESS.2023.3262023 |
| 15 | LIU B C, SHI Q Y, HAN P. Short-term 4D trajectory prediction method based on LST-M-IMM[C]//Proc. of the IEEE/AIAA 41st Digital Avionics Systems Conference, 2022. |
| 16 |
SUN Y, TIAN X, BAO W, et al. Improving treatment of noise specification of Kalman filtering for state updating of hydrological models: combining the strengths of the interacting multiple model method and c-ubature Kalman filter[J]. Water Resources Research, 2023, 59 (7): e2022WR033635.
doi: 10.1029/2022WR033635 |
| 17 | DENG F, YANG H L, WANG L J. Adaptive unscented Kalman filter based estimation and filtering for dynamic positioning with model uncertainties[J]. International Journal of Control, Automation and Systems, 2019, 17 (3): 667- 678. |
| 18 |
HU K Y, WANG J M, CHENG Y Q, et al. Adaptive filtering and smoothing algorithm based on variable structure interactive multiple model[J]. Scientific Reports, 2023, 13 (1): 12993.
doi: 10.1038/s41598-023-39075-9 |
| 19 |
ZHOU H, ZHAO H, HUANG H Q, et al. A cubature-principle-assisted IMM-adaptive UKF algorithm for maneuvering target tracking caused by sensor faults[J]. Applied Sciences, 2017, 7 (10): 1003.
doi: 10.3390/app7101003 |
| 20 | WU X T, LIU Y, MA X C. An underwater maneuvering target tracking algorithm based on UKF with adaptive sampling range[C]//Proc. of the Technical Committee on Control Theory, 2023: 3133−3138. |
| 21 |
LIU M, NIU J, LIU Y. UKF-MOT: an unscented Kalman filter-based 3D multi-object tracker[J]. CAAI Transactions on Intelligence Technology, 2024, 9 (4): 1031- 1041.
doi: 10.1049/cit2.12315 |
| 22 |
DONG Y L, LI W Q, LI D X, et al. Intelligent tracking method for aerial maneuvering target based on unscented Kalman filter[J]. Remote Sensing, 2024, 16 (17): 3301.
doi: 10.3390/rs16173301 |
| 23 |
RONG D D, WANG Y. An adaptive spatial target tracking method based on unscented Kalman filter[J]. Sensors, 2024, 24 (18): 6094.
doi: 10.3390/s24186094 |
| 24 |
HOU Z W, BU F L. A small UAV tracking algorithm based on AIMM-UKF[J]. Aircraft Engineering and Aerospace Technology, 2021, 93 (4): 579- 591.
doi: 10.1108/AEAT-01-2019-0013 |
| 25 | 黄小平, 王岩, 缪鹏程. 目标定位跟踪原理及应用[M]. 北京: 电子工业出版社, 2018. |
| HUANG X P, WANG Y, MIAO P C. Principle and application of target location and tracking[M]. Beijing: Publishing House of Electronics Industry, 2018. | |
| 26 |
ZHAO B F. Multisensor maneuvering target fusion tracking using interacting multiple model[J]. Automatic Control and Computer Sciences, 2024, 58 (3): 303- 312.
doi: 10.3103/S0146411624700184 |
| 27 | SUN M X, DUAN Q W, XIA W R, et al. Multiple adaptive factors based interacting multiple model estimator[J]. IET Control Theory & Applications, 2024, 18 (8): 1059- 1069. |
| 28 |
LI X H, LU B, LI Y X, et al. Adaptive interacting multiple model for underwater maneuvering target tracking with one-step randomly delayed measurements[J]. Ocean Engineering, 2023, 280, 114933.
doi: 10.1016/j.oceaneng.2023.114933 |
| 29 |
ZHENG T Y, YAO Y, HE F H, et al. Active switching multiple model method for tracking a noncooperative gliding flight vehicle[J]. SCIENCE CHINA Information Sciences, 2020, 63 (9): 192202.
doi: 10.1007/s11432-019-1515-2 |
| 30 |
WANG J W, CHEN X Y, SHAO X. An adaptive multiple backtracking UKF method based on Krein space theory for marine vehicles alignment process[J]. IEEE Trans. on Vehicular Technology, 2023, 72 (3): 3214- 3226.
doi: 10.1109/TVT.2022.3220243 |
| 31 | QIU Y H, SU Y, HE X Y, et al. An improved IMM-KF for UAV position prediction[C]//Proc. of the International Conference on Control and Intelligent Robotics, 2023. |
| [1] | Xiaomeng MA, Dongming DENG, Yongjian SHEN, Jinshan DING, Guoqing HAO. Multi-target tracking method based on single observer passive motion location [J]. Systems Engineering and Electronics, 2025, 47(8): 2549-2557. |
| [2] | Boyang JI, Jiong LI, Yangchao HE, Jikun YE, Humin LEI. Reentry gliding vehicle guidance method based on min-cost criterion [J]. Systems Engineering and Electronics, 2025, 47(8): 2715-2726. |
| [3] | Xiaohui LI, Wen YANG, Siting LYU, Liang MAO. Decision tree-based adaptive compression algorithm for multi-visual tasks [J]. Systems Engineering and Electronics, 2025, 47(8): 2737-2743. |
| [4] | Yixin SUN, Yuyuan FANG, Lei ZHANG. Tactical maneuver priori assisted interactive multiple model target tracking method [J]. Systems Engineering and Electronics, 2025, 47(7): 2086-2097. |
| [5] | Zhixun MA, Chaoran YIN, Tianqi WANG, Chengpeng HAO. Adaptive detection method of MIMO sonar incorporating prior knowledge [J]. Systems Engineering and Electronics, 2025, 47(7): 2383-2388. |
| [6] | Zhengyi ZHAO, Pulong NAN. Efficient space frequency adaptive processing method based on short-time Fourier transform [J]. Systems Engineering and Electronics, 2025, 47(6): 1778-1785. |
| [7] | Hongyuan ZHANG, Baichun GONG, Fei HAN, Yue SUN, Xin NING. Space-based passive cooperative multi-target initial orbit determination method in complex environments [J]. Systems Engineering and Electronics, 2025, 47(5): 1404-1413. |
| [8] | Yongqi YAN, Qi WANG, Fan YI. Algorithm for countering velocity gate pull-off jamming based on interacting multiple model probability data association [J]. Systems Engineering and Electronics, 2025, 47(5): 1507-1515. |
| [9] | Yiran XIANG, Songting LI, Lihu CHEN. Adaptive beamforming adjustment method for satellite-based ADS-B based on clustering algorithm [J]. Systems Engineering and Electronics, 2025, 47(5): 1680-1686. |
| [10] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [11] | Shengjie XING, Dong ZHAO, Wenjing REN. Event-triggered based actuator failure compensation for flexible manipulator [J]. Systems Engineering and Electronics, 2025, 47(4): 1311-1318. |
| [12] | Shaojun YU, Julan XIE, Zishu HE, Huiyong LI. Optimal adaptive beamforming for wideband LFM signals based on integer time delay [J]. Systems Engineering and Electronics, 2025, 47(3): 691-700. |
| [13] | Jinrong LONG, Jianxin WU, Yi LIANG. Angle measurement method for distributed coherent radar based on adaptive sum and difference beamforming [J]. Systems Engineering and Electronics, 2025, 47(3): 779-787. |
| [14] | Shaowei HUANG, Yanli DU, Yanbin LIU, Yueping WANG, Wu LIU. Adaptive sliding cooperative terminal guidance with finite-time convergence [J]. Systems Engineering and Electronics, 2025, 47(3): 961-969. |
| [15] | Yijia SONG, Haiyan WANG, Wei FENG, Yinghui QUAN. An aligned subspace adaptive ensemble algorithm based on hyperspectral cross-scene transfer learning [J]. Systems Engineering and Electronics, 2025, 47(2): 369-375. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||